


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК621.313.3+621.313.002+531.7
Ю. В. ГРЕЧУШКИН
(ГНЦ РФ «ЦНИИ «Электроприбор», Санкт-Петербург)
АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ОСТАТОЧНОГО МОМЕНТА В ВЕНТИЛЬНЫХ ЭЛЕКТРОДВИГАТЕЛЯХ С ПОСТОЯННЫМИ МАГНИТАМИ
Рассматриваются возможность автоматизации измерительного контроля остаточного момента в многополюсных вентильных моментных электродвигателях с постоянными магнитами и возможность определения его величины и характера изменения в функции угла поворота ротора программно-аппаратными средствами безредукторного управляемого цифрового вентильного электропривода.
Введение
Остаточный момент или момент сопротивления при обесточенных обмотках является свойством моментных вентильных электродвигателей с постоянными магнитами и носит переменный характер. При построении безредукторных следящих систем (БСС) на основе подобных электродвигателей остаточный момент выступает в роли переменного возмущающего воздействия и снижает точностные характеристики БСС.
Для повышения точностных характеристик БСС возникает необходимость либо учитывать остаточный момент при построении БСС, либо находить принципиальные и конструктивно-технологические решения по снижению остаточного момента в конструкции самого электродвигателя.
В указанных случаях возникает необходимость получения достоверной информации об остаточном моменте, причем как о его величине, так и характере изменения в функции угла поворота ротора электродвигателя в процессе его производства'.
Применяемый в настоящее время способ измерительного контроля остаточного момента, так называемый метод «Шкива и груза» или метод «Моментомера», имеет ручную реализацию с элементами механизации, имеет невысокую точность, значительную трудоемкость и позволяет оценивать только максимальное значение остаточного момента.
Представляемый доклад посвящен актуальным вопросам автоматизации измерительного контроля остаточного момента в моментных вентильных электродвигателях с постоянными магнитами, имеющей целью достоверное определение параметров остаточного момента с высокой точностью и существенное повышение производительности процесса измерительного контроля.
Идеология автоматизированной системы контроля остаточного момента и возможность ее реализации
Как следует из введения, существующие методы измерительного контроля остаточного момента не позволяют решать задачи связанные со снижением времени и трудоемкости производственного контроля и получением достаточного объема достоверной информации о его характере в функции угла поворота ротора вентильного электродвигателя, особенно в многополюсных моментных, с достаточно высокой точностью, что необходимо для выработки принципиальных и конструктивно-технологических решений по снижению остаточного момента в конструкции самих электродвигателей.
Предварительная проработка путей решения задачи создания автоматизированной системы контроля, обеспечивающей возможность определения параметров остаточного момента в процессе работы электродвигателя показала, что подобная автоматизированная система контроля принципиально может быть реализована программно-аппаратными средствами цифровой системы управления вентильным электроприводом, который замкнут отрицательной обратной связью по угловому положению ротора.
Структурная схема такого электропривода приведена на рисунке 1.
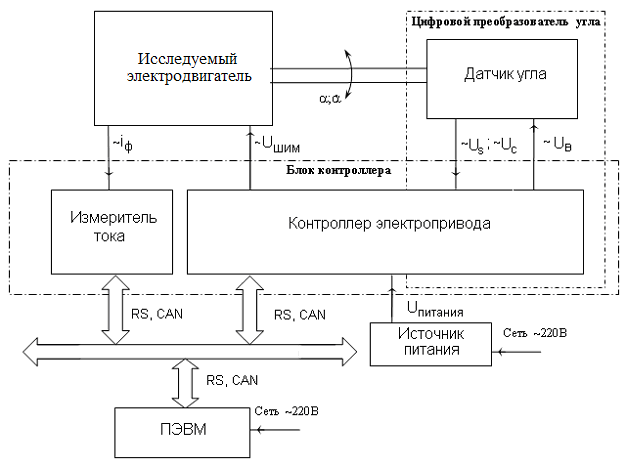
Рис. 1. Структурная схема управляемого цифрового вентильного электропривода с отрицательной обратной связью по угловому положению
В состав управляемого цифрового вентильного электропривода согласно рисунка 1, помимо собственно электродвигателя, входят контроллер электропривода и измеритель тока, высокоточный цифровой преобразователь угла, источник питания и ПЭВМ.
Идеология предлагаемой автоматизированной системы контроля заключается в определении остаточного момента путём задания исследуемому электродвигателю такого режима работы в составе электропривода, при котором развиваемый электродвигателем момент будет уравновешиваться (повторять) остаточный момент. Это означает, что развиваемый электродвигателем момент может быть определен посредством измерения токов фаз и угла поворота его ротора в этом режиме работы.
Алгоритм работы автоматизированной системы контроля остаточного момента можно представить в виде шести основных этапов:
1. Определение масштабирующего коэффициента момента, т. е. зависимости развиваемого электродвигателем момента от потребляемого тока.
2. Задание электродвигателю в составе электропривода режима стабилизации скорости вращения при отсутствии нагрузки, т. е. такого режима, в котором электродвигатель будет развивать момент равный сумме остаточного момента и момента трения в узлах опор.
Равенство развиваемого электродвигателем момента сумме остаточного момента и момента трения в узлах опор в режиме стабилизации скорости вытекает из основного уравнения движения электропривода [1] при условии постоянства частоты вращения ротора электродвигателя:
![]() , (1)
, (1)
где щ – скорость вращения ротора исследуемого электродвигателя; МДвигатель – развиваемый электродвигателем момент; МОстаточный – остаточный момент электродвигателя; МТрения – момент трения в узлах опор.
![]() (2)
(2)
3. Определение в заданном режиме текущих значений фазных токов электродвигателя и мгновенных угловых положений его ротора.
4. Расчет развиваемого электродвигателем момента в функции угла поворота его ротора по измеренным текущим значениям фазных токов и угловых положений его ротора.
5. Выделение из полученной функциональной зависимости значений остаточного момента с исключением момента трения в узлах опор.
6. Математический анализ полученной функции остаточного момента, включающий анализ ее гармонического состава.
Расчёт развиваемого электродвигателем момента на четвертом этапе алгоритма осуществляется в понятиях обобщённых пространственных векторов с использованием прямых преобразований Кларка и Парка-Горева [2,3].
Развиваемый момент вентильного электродвигателя, согласно [2], определяется следующим выражением
![]() , (3)
, (3)
где СМ – масштабирующий коэффициент момента; I – ток, потребляемый электродвигателем; ц - угол между векторами тока и пока электродвигателя.
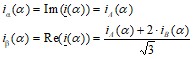
Прямое преобразование Кларка позволяет представить токи трёхфазной обмотки статора электродвигателя в виде проекций обобщённого пространственного вектора тока на ортогональные оси комплексной плоскости в виде:
 (4)
(4)
где iA(б), iВ(б) – текущие значения фазных токов электродвигателя, б – текущее значения углового положения ротора электродвигателя; i(б) – обобщенный пространственный вектор тока электродвигателя; iб(б), iв(б) - проекции обобщённого пространственного вектора тока на мнимую и действительную оси координат соответственно.
Прямое преобразование Парка-Горева позволяет перейти от неподвижной ортогональной системы координат к системе координат вращающейся синхронно с обобщенным пространственным вектором магнитного потока электродвигателя, при этом мнимая ось системы координат будет совмещена с этим вектором, как показано на рисунке 2:
![]() , (5)
, (5)
где id(б), iq(б) - проекции обобщённого пространственного вектора тока на оси вращающейся системы координат.
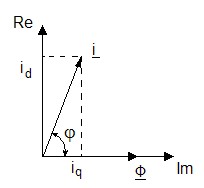

Рис. 2. Представление обобщённого пространственного вектора тока его проекциями на ортогональные оси комплексной плоскости, ориентированной по вектору потока
Такой способ расчета развиваемого электродвигателем момента позволяет учесть не только величину потребляемого тока, но и угол ц взаимного положения векторов тока и магнитного потока электродвигателя, который так же влияет на величину развиваемого вращающего момента.
С целью подтверждения работоспособности приведенного алгоритма в среде Simulink/MatLab была построена виртуальная модель автоматизированной системы контроля остаточного момента и проведено моделирование. Укрупненная схема моделирования приведена на рисунке 3.
На рисунке 3 приняты следующие условные обозначения: МД – вентильный электродвигатель; ФВВ – блок формирующий возмущающее воздействие, которое складывается из остаточного момента и момента трения в узлах опор; ФУВ – блок формирующий управляющее воздействие (режим стабилизации скорости); БРМ – блок расчета развиваемого электродвигателем момента по текущим значениям токов фаз и угловых положений ротора электродвигателя.
Выделение из функции развиваемого электродвигателем момента значений остаточного момента и математический анализ полученного результата при моделировании осуществляются программно.
Результаты моделирования, приведенные на рисунке 4, показывают высокую степень сходимости значений остаточного момента, определенных в функции угла поворота ротора электродвигателя по вышеизложенному алгоритму, со значениями остаточного момента, заданными при моделировании в качестве исходных данных.
В процессе проработки был рассмотрен один из вариантов программно-аппаратного состава предлагаемой автоматизированной системы контроля остаточного момента, который включил в себя: устройство с узлами опор для
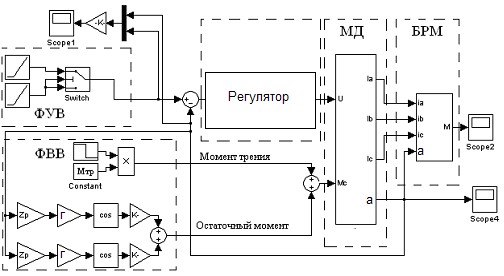

Рис. 3. Укрупненная схема моделирования автоматизированной системы контроля остаточного момента
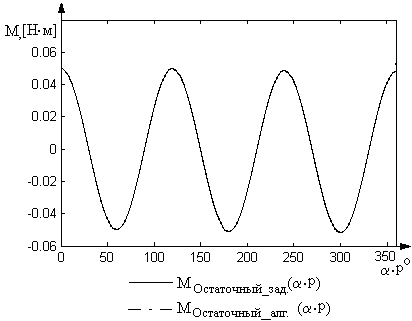
Рис. 4. Результаты моделирования алгоритма работы автоматизированной системы контроля остаточного момента
установки электродвигателя; блок контроллера БСС, объединяющий в себе измеритель токов фаз электродвигателя, контроллер электропривода и рабочее программное обеспечение; цифровой преобразователь угла, состоящий из индукционного двухотсчетного датчика угла типа ДУ и его аналого-цифрового преобразователя угла; ПЭВМ; принтер; комплект пользовательского программного обеспечения; средство для установки датчика угла на устройство с узлами опор; комплект жгутов и источник питания.
Анализ потенциальных источников погрешности измерительного контроля остаточного момента в предлагаемой схеме автоматизированной системы контроля и ее программно-аппаратных средств показал, что основными источниками погрешности являются:
- погрешность определения текущих значений угловых положений ротора исследуемого электродвигателя в режиме стабилизации скорости;
- погрешность определения текущих значений фазных токов исследуемого электродвигателя в режиме стабилизации скорости;
- погрешность определения масштабирующего коэффициента момента.
Предварительная оценка этих источников показала, что вносимая ими погрешность не превышает 10-15%.
Заключение
На основании проведенных аналитических исследований, проработок и результатов моделирования:
- является возможной реализация автоматизированной системы контроля остаточного момента в многополюсных моментных вентильных электродвигателях с постоянными магнитами программно-аппаратными средствами цифрового управляемого вентильного электропривода;
- является возможным определение средствами предложенной автоматизированной системы с высокой точностью величины и характера изменения остаточного моменты в функции угла поворота ротора многополюсного моментного вентильного электродвигателя с постоянными магнитами;
- является возможным обеспечение в процессе производства многополюсных моментных вентильных электродвигателях с постоянными магнитами измерительного контроля остаточного момента с минимальной трудоемкостью и минимальными временными затратами на его проведение;
-является возможной выработка решений по снижению остаточного момента в конструкции самих электродвигателей и обеспечение построения безредукторных следящих систем с более высокими точностными характеристиками.
ЛИТЕРАТУРА
1. Теория электропривода – М.: Энергоатомиздат, 2001. - 412 с.
2. Бесконтактные электрические машины – М.: Высш. шк., 1985. – 255 с.
3. Системы управления электроприводов // , – М.: Издательский центр «Академика», 2008. – 256 с.
Авторы не возражают против размещения доклада в Интернете и согласны с его последующей публикацией в сборнике материалов конференции
Контактные телефоны и электронный адрес:
моб. +7-921-774-07-83
раб. местн. 37-52
Почта:
*****@***ru
grechushkin. *****@***ru
' Научный руководитель к. т.н.
