
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 004.94:621.8
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ РУКОЯТИ ЭКСКАВАТОРА
,
Карагандинский государственный технический университет, Казахстан
Продолжающийся интерес к разработке эффективных методик оптимального проектирования на глобальном уровне применительно к конструкциям, представленным расчетными моделями в виде набора конечных элементов, способствовал развитию методов расчета конструкций, ориентированных на их оптимальное проектирование.
В данной работе предлагается результат автоматизированного расчета напряженно-деформированного состояния рукояти экскаватора САТ-5130 ВМЕ (рис. 1) с использованием современного конечно-элементного комплекса ANSYS.
Исследуемая модель должна быть построена в соответствии с чертежами, учитывая материал изготовления и геометрические особенности. Объект проектирования представляет собой металлическую оболочку, на противоположных частях которой находятся стальные литые корпуса сложной формы, а также два кронштейна, служащие для соединения рукояти с гидроцилиндрами. Один из корпусов соединяется с ковшом экскаватора, другой – со стрелой. Общая длина рукояти составляет 5,3 м, масса – 5790 кг. Толщина металлических оболочек варьируется от 20 до 40 мм. Свойства материала должны отражать физические характеристики материала изготовления (Сталь 35-Л, Ст 3, 15ХСНД, 09Г2С).
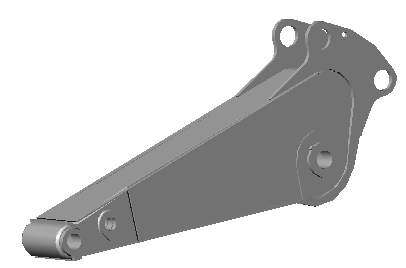
Рисунок 1 Рукоять экскаватора САТ-5130 ВМЕ
Рукоять экскаватора САТ 5130 ВМЕ является сборочной единицей, состоящей из литых деталей, соединенных стальными листами толщиной от 20 до 40 мм. Следовательно, должен применяться твердотельный тип конечного элемента - SOLID. В работе был использован для решения трехмерной структурной задачи – SOLID95. Дискретная модель объекта представлена на рисунке 2.
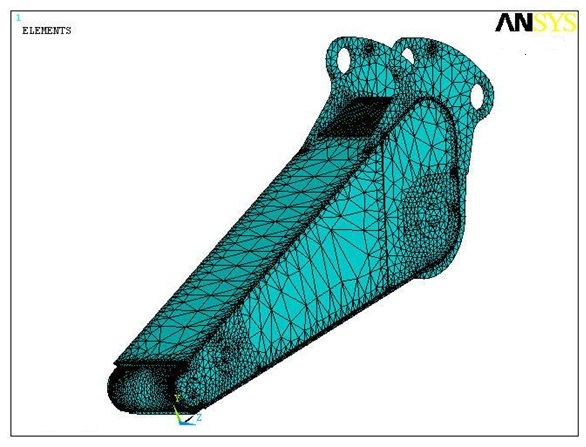
Рисунок 2 Дискретная модель рукояти экскаватора САТ-5130 ВМЕ
Силы, действующие на рукоять во время работы экскаватора, являются распределенными. Они возникают в местах соединения рукояти со стрелой, ковшом и гидроцилиндрами и имеют поверхностный характер. Распределенная нагрузка может быть приложена двумя способами: как сосредоточенная сила в узлах (в Ньютонах) и как давление на поверхность (в Паскалях).
В результате решения получена достоверная картина напряжений, смещений и деформаций, которая позволит проводить дальнейшие исследования. Как видно из рисунка 3 максимальное положительное отклонение по оси Х составляет 0,09 мм, отрицательное – 0,47 мм. Как видно из рисунка максимальный прогиб составляет 0,69 мм в положительном направлении и 0,05 мм. Следовательно, можно сделать вывод, что смещения незначительны.
a)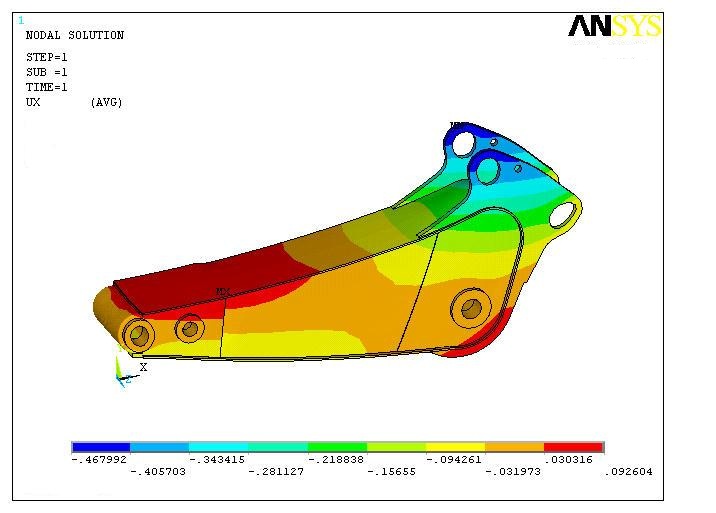 б)
б)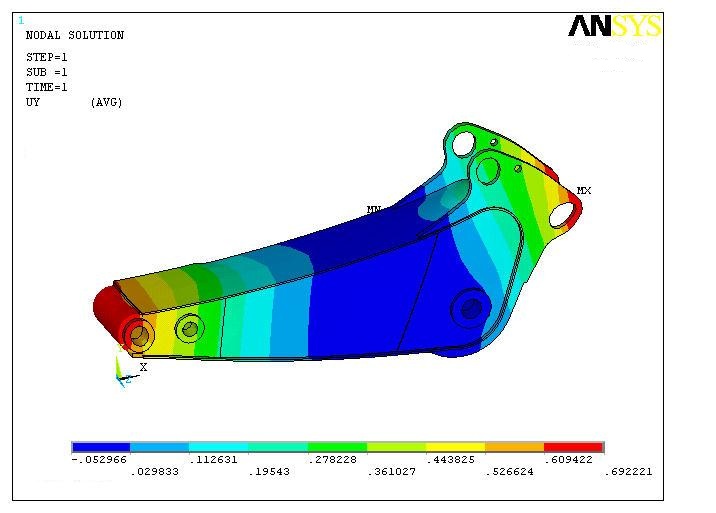
а) вертикальные перемещения; б) продольные перемещения
Рисунок 3 Карты распределения перемещений точек
На рисунке 4 представлена эпюра возникающих напряжений по оси Х. Минимальное значение составляет -127 МПа, максимальное - 102.646 МПа. Из эпюры напряжений по оси Y видно, что значение напряжения изменяется от -305 до 320 Мпа. Максимальное значение эквивалентных напряжений по Мизесу составляет 391.8 МПа.
а)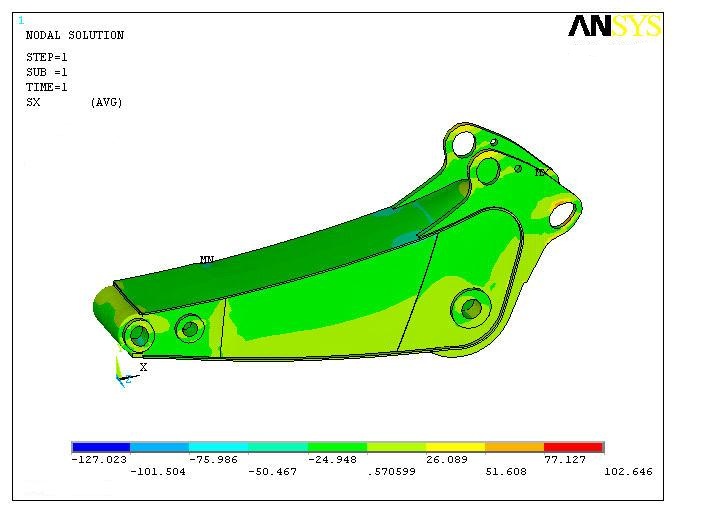 б)
б)
а) эпюра напряжений по оси Х; б) эпюра напряжений по оси Y;
Рисунок 4 Карты распределения напряжений рукояти экскаватора
Проанализировав эпюры перемещений и напряжений, можно сделать вывод, что изделие выдерживает все нагрузки (что подтверждается практикой), а запас прочности является завышенным. Следовательно, есть возможность уменьшить расход материала за счет изменения толщины стенок. Для этого в дальнейшем планируется провести оптимизацию оптимизации геометрических параметров рукояти экскаватора САТ-5130 ВМЕ.
