


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Московский государственный университет имени
Кафедра «Вычислительной механики»
КУРСОВАЯ РАБОТА
На тему: «Анализ сеточной сходимости в задачах теории упругости, реализуемых в пакете Fidesys, при использовании различных решателей СЛАУ.»
Выполнил:
Коваленко Алексей
студент 3 курса
группы 325
Научный руководитель:
2014 год
Москва
Цели и задачи
- Выполнить расчеты на пакете Fidesys, посмотреть сеточную сходимость на конкретной задаче и сверить с теоретическими данными. Рассмотреть существующие современные решатели для дальнейшего их подбора в пакет Fidesys.
Проведённая работа
- Сделал постановку задачи Буссинеска теории упругости в пакете Fidesys, методом конечного элемента сделаны вычисления Применил к задаче сетки таких типов как hex 8, hex27 Сравнил показатели вычислений на разном количестве элементов, сделал график и исследовал сходимость.
Теория к задаче Буссинеска
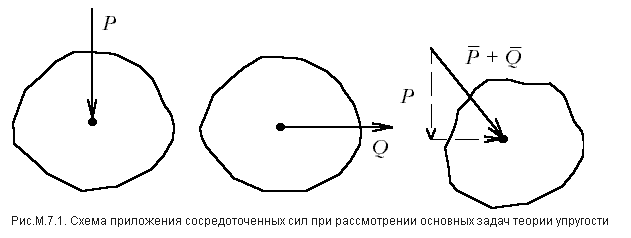
РАСПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ В СЛУЧАЕ ДЕЙСТВИЯ СОСРЕДОТОЧЕННЫХ СИЛ
Решение какой задачи теории упругости для полупространства является основным? Чем обусловлена возможность использования его для решения других практически важных задач?
Основным является решение задачи о сосредоточенной силе, приложенной к поверхности полупространства перпендикулярно к граничной плоскости (задача Буссинеска). Для решения задач о нагрузке, имеющей горизонтальную составляющую, рассматривается дальнейшее развитие решения этой же задачи, но при сосредоточенной силе, действующей вдоль граничной плоскости (как бы "прикрепленной" к ней в одной точке, рис. М.7.1.). Аналогичные решения задач о сосредоточенных силах вертикальной и горизонтальной, то есть приложенных перпендикулярно (решение Фламана) и по касательной к границе полуплоскости, также являются основными. Из них путем интегрирования могут быть получены многие решения интересующих нас в практических целях задач.
Чему равны напряжения непосредственно под сосредоточенной силой? Какое предположение делается в отношении зоны, расположенной непосредственно у сосредоточенной силы?
Задача эта является абстрактной, так как в действительности усилия всегда распределяются по некоторой площадке. Непосредственно под сосредоточенной силой напряжения являются бесконечно большими. Предполагается, что сплошная среда является бесконечно прочной и не может разрушаться. Буссинеск, чтобы обойти это обстоятельство, не рассматривал небольшую зону, непосредственно находящуюся у сосредоточенной силы.
Каковы граничные условия в задаче о сосредоточенной силе на полупространстве?
В месте приложения сосредоточенной силы, непосредственно совпадающем с началом координат (так проще решить задачу), действует эта сила, а во всех остальных точках границы никаких сил не действует. В точках, бесконечно удаленных от места приложения силы, напряжения должны стремиться к нулю.
Каким образом напряжение σ R зависит от угла, радиуса, величины силы? Сколько координат участвует в решении этой задачи и какие?
Напряжениеσ R является основным. Это напряжение пропорционально косинусу угла между радиусомвектором и вертикалью, обратно пропорционально квадрату радиуса и прямо пропорционально величине действующей силы. В решении этой задачи, вследствие имеющейся симметрии, участвуют две координаты - радиус и угол между ним и вертикалью.
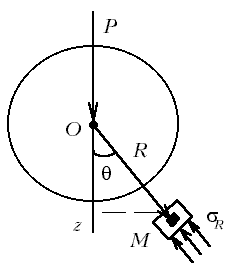 Рис. М.7.5
Рис. М.7.5
Из каких условий определяется безразмерный коэффициент в формуле для σ R в задаче о сосредоточенной силе на полупространстве?
Из условия равновесия при проектировании всех сил на вертикальную ось. Вырезается полусфера и на вертикальную ось проектируются все напряжения σ R, умноженные на элементарные площадки (чтобы получить элементарные силы). Эти проекции должны уравновешиваться силой, действующей сверху вниз на полупространство (рис. М.7.5).
Как можно воспользоваться теорией размерностей для решения задачи о сосредоточенной силе?
Поскольку напряжение σ R зависит от величины силы P, угла между вертикалью и радиусом θ , а также радиуса R, то, учитывая, что напряжение должно быть пропорционально силе, она попадает в числитель. Далее выбирается тригонометрическая функция от угла θ , четная, не зависящая от знака θ , имеющая максимум при θ =0 и равная нулю при θ=± π /2. Такой простейшей функцией является cosθ . Естественно, что этот множитель попадает также в числитель. Поскольку напряжение σ R с увеличением расстояния от точки приложения силы должно убывать, то радиус R должен попасть в знаменатель. Однако для того, чтобы уравнять разномерности (слева H/м2, а справа, если R в знаменателе в первой степени, то Н/м, а если во второй степени, то H/м2), необходимо записать R в квадрате, откуда получим
![]()
Коэффициент A определяется в соответствии с ответом на вопрос М.7.5. и равен A=3/2π .
Как получить напряжение σz, зная напряжение σ R?
Если известно σ R, то из условия равновесия элемента мы имеем в данном случае σ z=σ Rcos2θ .
Какой вид имеют эпюры напряжений σzв задаче о сосредоточенной силе?
Эпюры напряжений σ z изображены на рис. М.7.8.

Рис. М.7.8. Эпюры напряжений σ z в полуплоскости и полупространстве по вертикальным и горизонтальному сечениям |
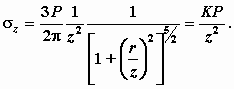
Каким образом привести решение задачи о сосредоточенной силе для напряжения σ z к удобной табличной форме?
Напряжение σ z в координатах x, y,z имеет следующий вид:

Следует ввести обозначение ![]() , где r - проекция радиуса R на граничную плоскость z = 0, а затем ввести относительную координату r/z. Тогда получим
, где r - проекция радиуса R на граничную плоскость z = 0, а затем ввести относительную координату r/z. Тогда получим
Каким образом следует изменить решение о сосредоточенной силе, нормальной к границе полупространства, чтобы получить решение задачи о силе, действующей вдоль границы полупространства?
Для вертикальной силы P имеем
![]()
для горизонтальной силы Q имеем
![]()
Таким образом, в функции одно из z заменяется на x. Для наклонной силы следует учесть обе эти составляющие P и Q.
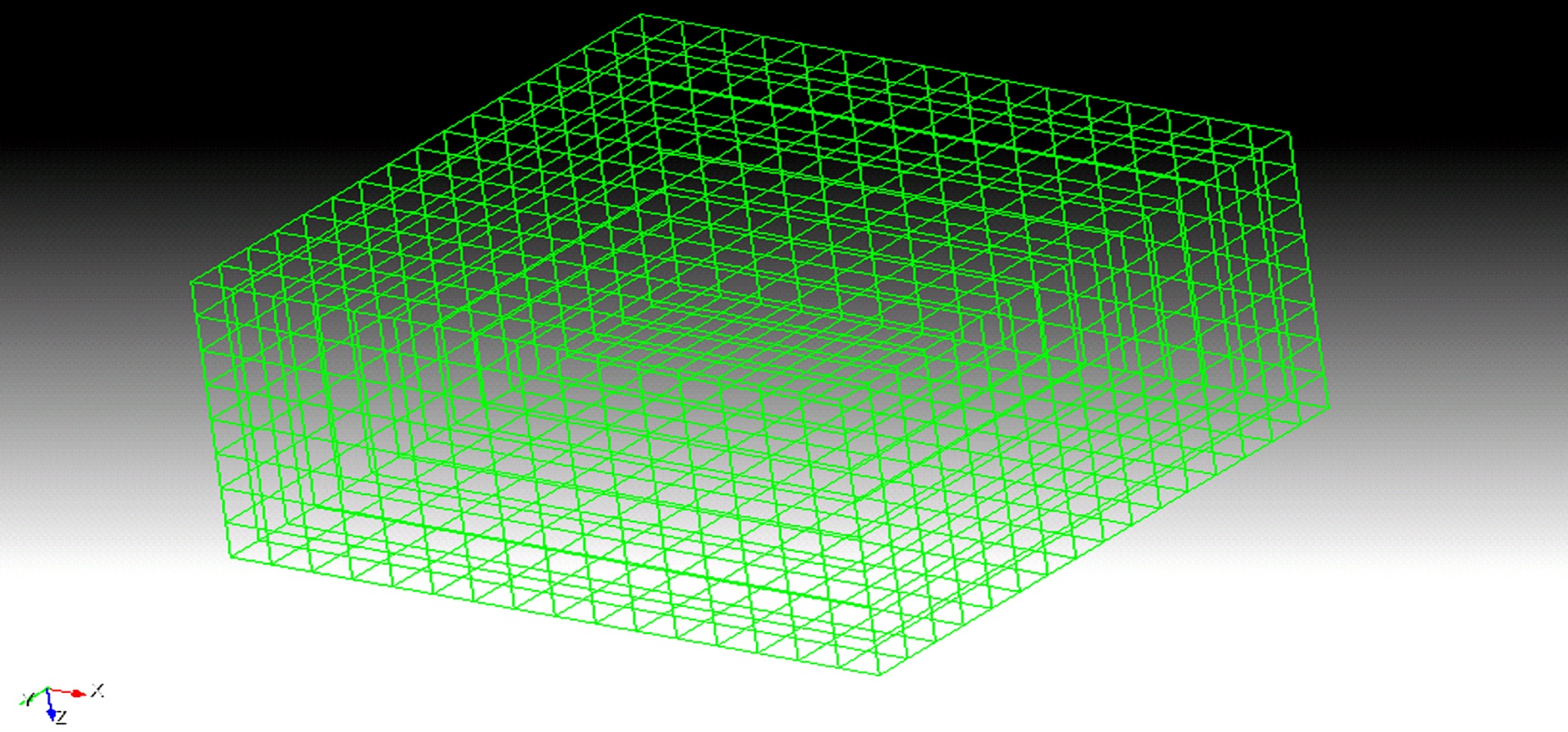
Практическая часть в препроцессоре
Геометрическая модель:
- Длина больших ребер параллелепипеда L = 50 м Длина меньших ребер параллелепипеда L = 25 м Используются цилиндрические координаты Начало координат в точке М
Граничные условия:
- Закрепление по всем перемещениям для плоскостей AA'B'B, BB'C'C, CC'D'D и A'B'C'D'. В точке М (середина стороны ABCD) приложена сила F величиной 100 кН, направленная по оси Z
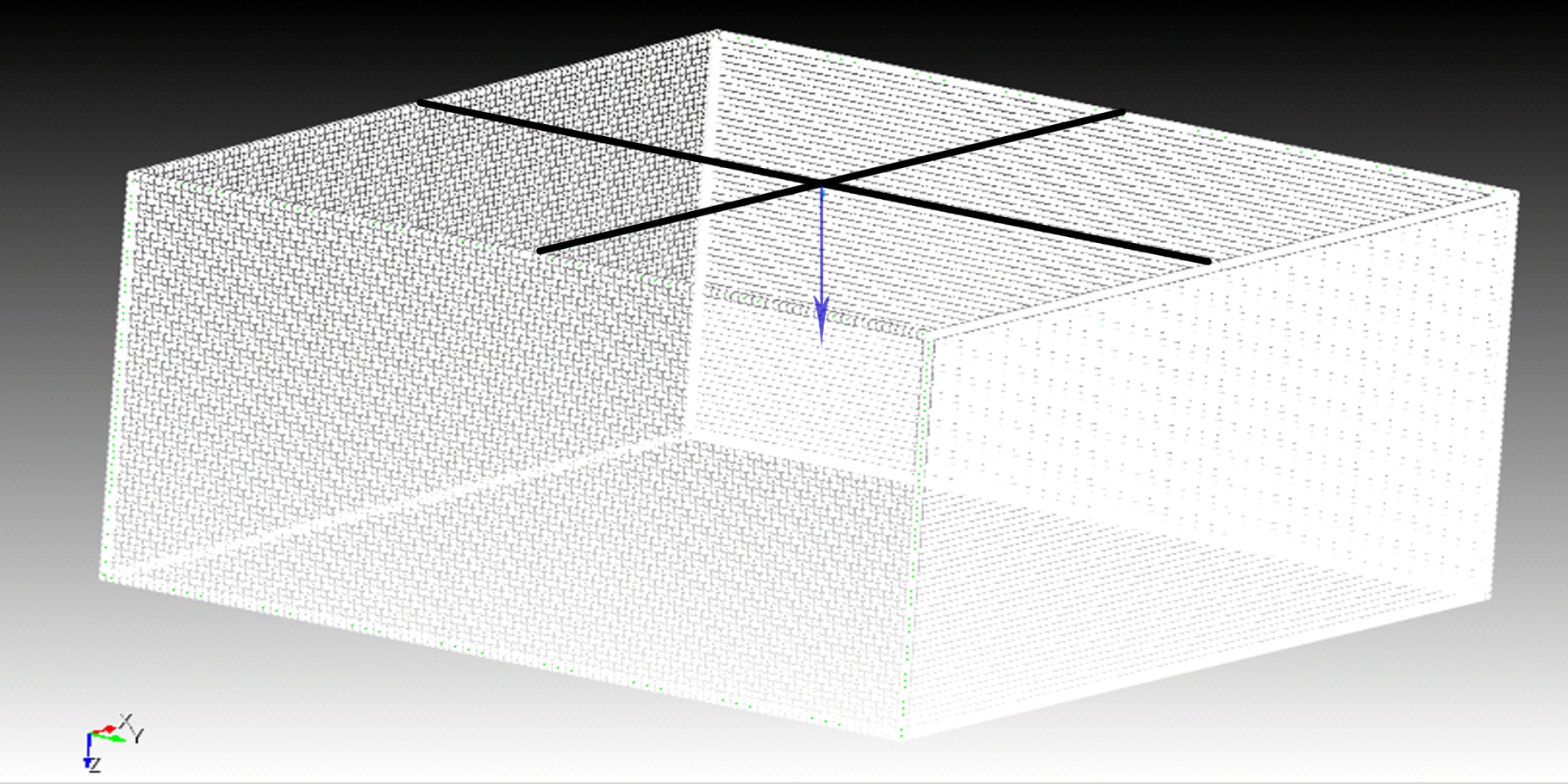
Сетка:
- 8-узловые гексаэдры (1 000 188 элементов) 27-узловые гексаэдры Материал изотропный
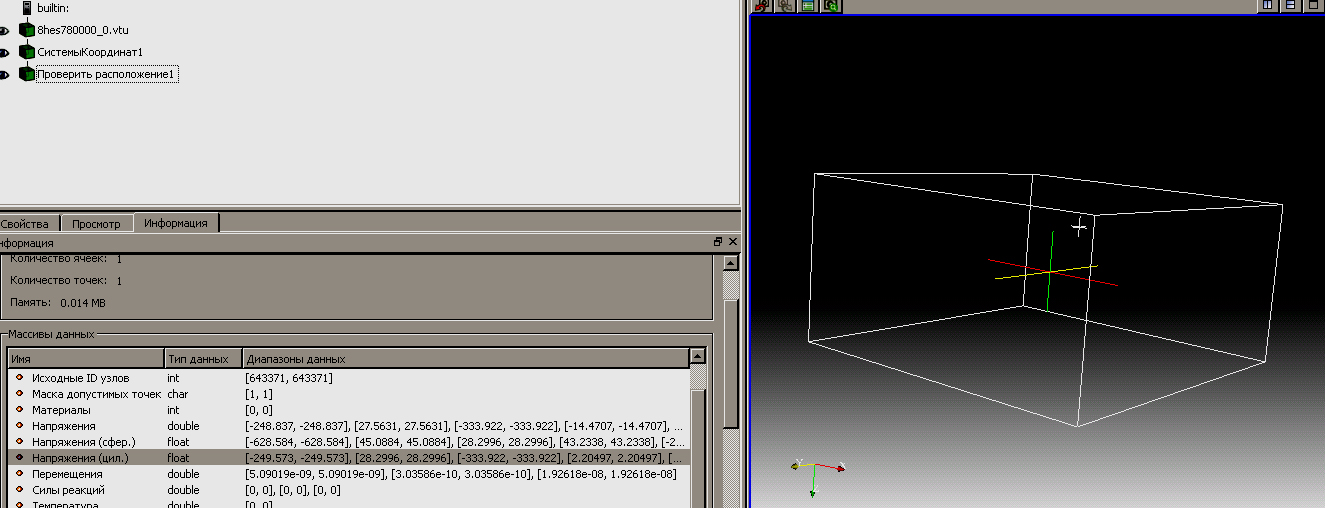
Вычислительная часть в постпроцессоре
Критерии прохождения теста:
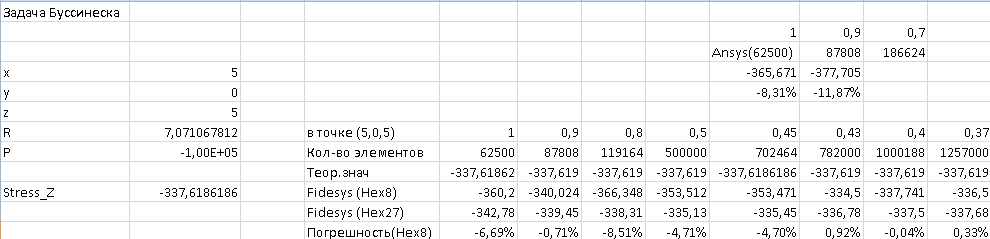
Напряжение в точке (5, 0.3, 5) равно -337.619 Па c точностью 1%
Значения вычислены по следующим
формулам :
![]()
Где ![]()
Исследование на сеточную сходимость
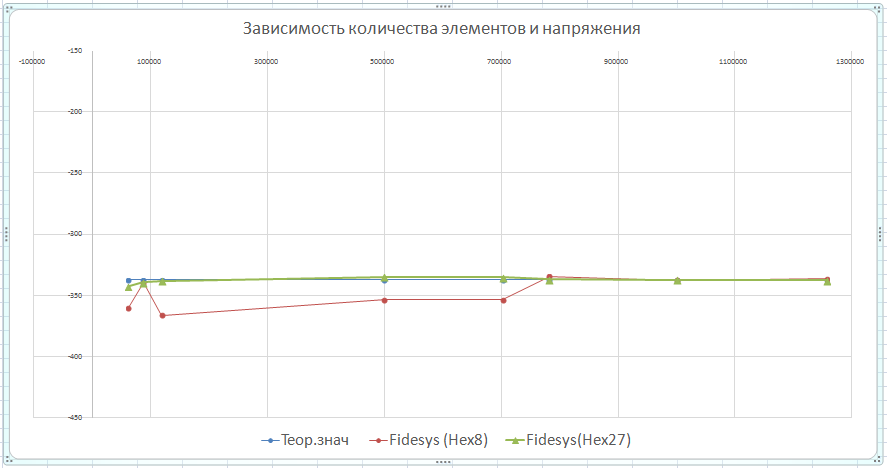
Счетные данные и погрешности
Краткие сведения о методе конечных элементов.
Основная идея метода конечных элементов (МКЭ) состоит в том, что любую непрерывную величину, такую, как напряжение или перемещение, можно аппроксимировать дискретной моделью, которая строится на множестве кусочно-непрерывных функций, определѐнных на конечном числе подобластей. Кусочно-непрерывные функции определяются с помощью значений непрерывной величины в конечном числе точек рассматриваемой области. При построении дискретной модели непрерывной величины поступают следующим образом:
1. В рассматриваемой области фиксируется конечное число точек. Это точки называются узловыми точками или просто узлами.
2. Значение непрерывной величины в каждой узловой точке считается переменной, которая должна быть определена.
3. Область определения непрерывной величины разбивается на конечное число подобластей, называемых элементами. Эти элементы имеют общие узловые точки, являющиеся зафиксированными узлами, и в совокупности аппроксимируют форму области.
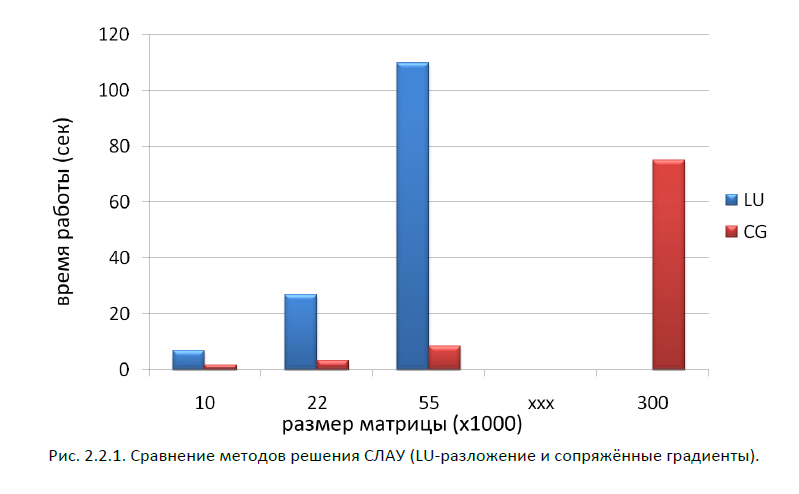
Сравнение прямых и итерационных решателей.
Были рассмотрены решатели, использующие прямой (LU-разложение) и итерационные (CG для симметричных, матриц) методы для решения систем линейных алгебраических уравнений (СЛАУ).
Результаты показали, что наиболее эффективным оказывается использовать решатели (солверы), использующие итерационные методы, т. к. прямые показывали плохую производительность, которая очень быстро падала по мере увеличения размеров матрицы, а при больших размерах системы эти решатели вообще переставали работать.
В отличие от прямых, итерационные методы не дают точного решения системы. Вначале задаѐтся некоторая допустимая погрешность, и итерации завершаются только когда эта точность будет достигнута. Количество итераций зависит не только от допустимой погрешности, но и от свойств самой матрицы: количество нулевых элементов в матрице, их расположения и т. п. Поэтому для более эффективного использования этого метода перед решением системы обычно применяют предобуславливатели, перенумерацию неизвестных и т. д.
Рассмотрение и анализ современных решателей
LU – разложение
LU-разложение — представление матрицы ![]() в виде произведения двух матриц,
в виде произведения двух матриц, ![]() , где
, где ![]() — нижняя треугольная матрица, а
— нижняя треугольная матрица, а ![]() — верхняя треугольная матрица. LU-разложение еще называют LU-факторизацией.
— верхняя треугольная матрица. LU-разложение еще называют LU-факторизацией.
LU-разложение используется для решения систем линейных уравнений, обращения матриц и вычисления определителя.
Этот метод является одной из разновидностей метода Гаусса.
LU-разложение может быть использовано для решения системы линейных уравнений
![]()
где ![]() — матрица коэффициентов системы,
— матрица коэффициентов системы,  — вектор неизвестных величин системы,
— вектор неизвестных величин системы, ![]() — вектор правых частей системы.
— вектор правых частей системы.
Если известно LU-разложение матрицы ![]() ,
, ![]() , исходная система может быть записана как
, исходная система может быть записана как
![]()
Эта система может быть решена в два шага. На первом шаге решается система
![]()
Поскольку ![]() — нижняя треугольная матрица, эта система решается непосредственно прямой подстановкой.
— нижняя треугольная матрица, эта система решается непосредственно прямой подстановкой.
На втором шаге решается система
![]()
Поскольку ![]() — верхняя треугольная матрица, эта система решается непосредственно обратной подстановкой.
— верхняя треугольная матрица, эта система решается непосредственно обратной подстановкой.
Метод сопряжённых градиентов
Метод сопряженных градиентов — метод нахождения локального минимума функции на основе информации о её значениях и её градиенте. В случае квадратичной функции в ![]() минимум находится за
минимум находится за ![]() шагов.
шагов.
Определим терминологию:
Пусть ![]() .
.
Введём на ![]() целевую функцию
целевую функцию ![]() .
.
Векторы ![]() называются сопряжёнными, если:
называются сопряжёнными, если:
где ![]() — матрица Гессе
— матрица Гессе ![]() .
.
Нулевая итерация
Пусть ![]()
Тогда ![]() .
.
Определим направление
![]()
так, чтобы оно было сопряжено с ![]() :
:
![]()
Разложим ![]() в окрестности
в окрестности ![]() и подставим
и подставим ![]() :
:
![]()
Транспонируем полученное выражение и домножаем на ![]() справа:
справа:
![]()
В силу непрерывности вторых частных производных ![]() . Тогда:
. Тогда:
![]()
Подставим полученное выражение в (3):

Тогда, воспользовавшись (1) и (2):
![]()
Если ![]() , то градиент в точке
, то градиент в точке ![]() перпендикулярен градиенту в точке
перпендикулярен градиенту в точке ![]() , тогда по правилам скалярного произведения векторов:
, тогда по правилам скалярного произведения векторов:
![]()
Приняв во внимание последнее, получим из выражения (4) окончательную формулу для вычисления ![]() :
:
![]()
К-я итерация
На k-й итерации имеем набор ![]() .
.
Тогда следующее направление вычисляется по формуле:
![]()
Это выражение может быть переписано в более удобном итеративном виде:
![]()
где ![]() непосредственно рассчитывается на k-й итерации.
непосредственно рассчитывается на k-й итерации.
Используемая литература
, Гудьер Дж. Теория упругости (1975) - Механика сплошной среды (2 тома) (1970) Ортега Дж. Введение в параллельные и векторные методы решения линейных систем. — М.: Мир, 1991. , Алгоритмы решения задач нелинейного программирования. — М.: МИФИ, 1982
