

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство транспорта Российской Федерации
Федеральное агентство железнодорожного транспорта
Федеральное государственное бюджетное образовательное учреждение высшего образования
Омский государственный университет путей сообщения
(ОмГУПС (ОмИИТ))
Кафедра «Автоматика и системы управления»
ОТЧЕТ
по производственной практике
Место прохождения производственной практики: ОмПО Иртыш
Студентка гр. 23И
____________
____________ 2016 г.
Руководитель производственной
практики
доцент кафедры АиСУ
Оценка: ____________________
____________________________
_______________
________________ 2016 г.
Омск 2016
Содержание
Введение…………………………………………………………………………..3
1 Архитектера ESN 4
1.1 Параметры ESN 4
1.2 Теория ESN 5
1.3 Обучение ESN 5
1.4 Процедура обучения 6
1.5 Процедура тестирования 6
2 Результаты экспериментов с ESN 8
Заключение 14
Введение
В этой работе проводится информационный обзор и анализ средств определения источника гармоник.
Исследуется применение сетей Эхо (ЕСН) как
расширения периодических нейронных сетей. Сложности с существующими алгоритмами, ограниченными контролируемыми методами подготовки RNNs для широкого применения. Когда дело доходит до практического применения, MLPNs по-прежнему доминируют. ESNs особая форма RNNs. RNNs кардинально отличаются от Feedforward архитектур в том смысле, что они не только работают на входном пространстве, но и на
внутреннем состоянии помещений, записывая то, что уже было обработано в сети.
Связь является важной частью в RНН. Полностью подключенный RНН означает, что нейрон в одном слое связан со всеми нейронами предыдущего слоя. Как правило, задачи, требующие некоторой формы памяти являются кандидатами для моделирования RНН.
В течение последнего десятилетия, несколько методов контролируемого обучения RNNs были изучены. В настоящее время наиболее важными в использовании являются: обратное распространение во времени (BPTT), в режиме реального времени периодическое обучение (RTRL) и расширенная фильтрация на основе метода Калмана (EKF). Несмотря на это, все указанные выше алгоритмы математически сложны и нет никаких явных преимуществ, BPTT, вероятно, наиболее широко используется из-за его сходства со стандартным алгоритмом обратного распространения.
ESNs представляют новый подход к обучению RNNs. ESNs были предложены для моделирования сложных динамических систем [125] - [129]. Принципы ESN основаны на использовании нейронной сети (RNН) в качестве динамического резервуара. Большой (порядок 100 нейронов) RНН используется в качестве динамических "резервуаров", которые могут быть возбуждены соответствующим образом, представленным входом и выходом обратной связи. Нагрузки подключения сети резервуара не изменяются путем обучения.
Для того, чтобы вычислить нужные динамики выхода, рассчитываются только нагрузки соединений от резервуара к устройствам вывода. Это - просто линейная проблема регрессии.
1 Архитектура ESN
ESNs имеют три основных слоя: входной слой, динамический резервуар и выходной слой. Входной слой связан с динамическим резервуаром через входные нагрузки ![]()
![]() .
.
Динамический резервуар имеет внутренние коэффициенты нагрузки ![]()
![]() , которые определяют текущие соединения внутри резервуара. Динамический резервуар для выходного слоя связан через выходные нагрузки
, которые определяют текущие соединения внутри резервуара. Динамический резервуар для выходного слоя связан через выходные нагрузки ![]()
![]() . Выходной сигнал подается обратно в резервуар через обратную связь нагрузки
. Выходной сигнал подается обратно в резервуар через обратную связь нагрузки ![]()
![]() . Конструктивно, главное различие между ESN и RNN - связность нейронов в пределах динамического резервуара. ESN слабо связано RНН с
. Конструктивно, главное различие между ESN и RNN - связность нейронов в пределах динамического резервуара. ESN слабо связано RНН с ![]()
![]() ,
, ![]()
![]() и
и ![]()
![]() ,фиксированные априори случайным образом выбранные значения. В отличие от RNNs, где нагрузки входные и выходные корректируются на основе минимизации среднего квадрата ошибки (СКО), только ESN расчет выходных нагрузок
,фиксированные априори случайным образом выбранные значения. В отличие от RNNs, где нагрузки входные и выходные корректируются на основе минимизации среднего квадрата ошибки (СКО), только ESN расчет выходных нагрузок ![]()
![]() , ведущие из динамического резервуара к выходному слою. На рисунке 6.1 показана структура ESN.
, ведущие из динамического резервуара к выходному слою. На рисунке 6.1 показана структура ESN.
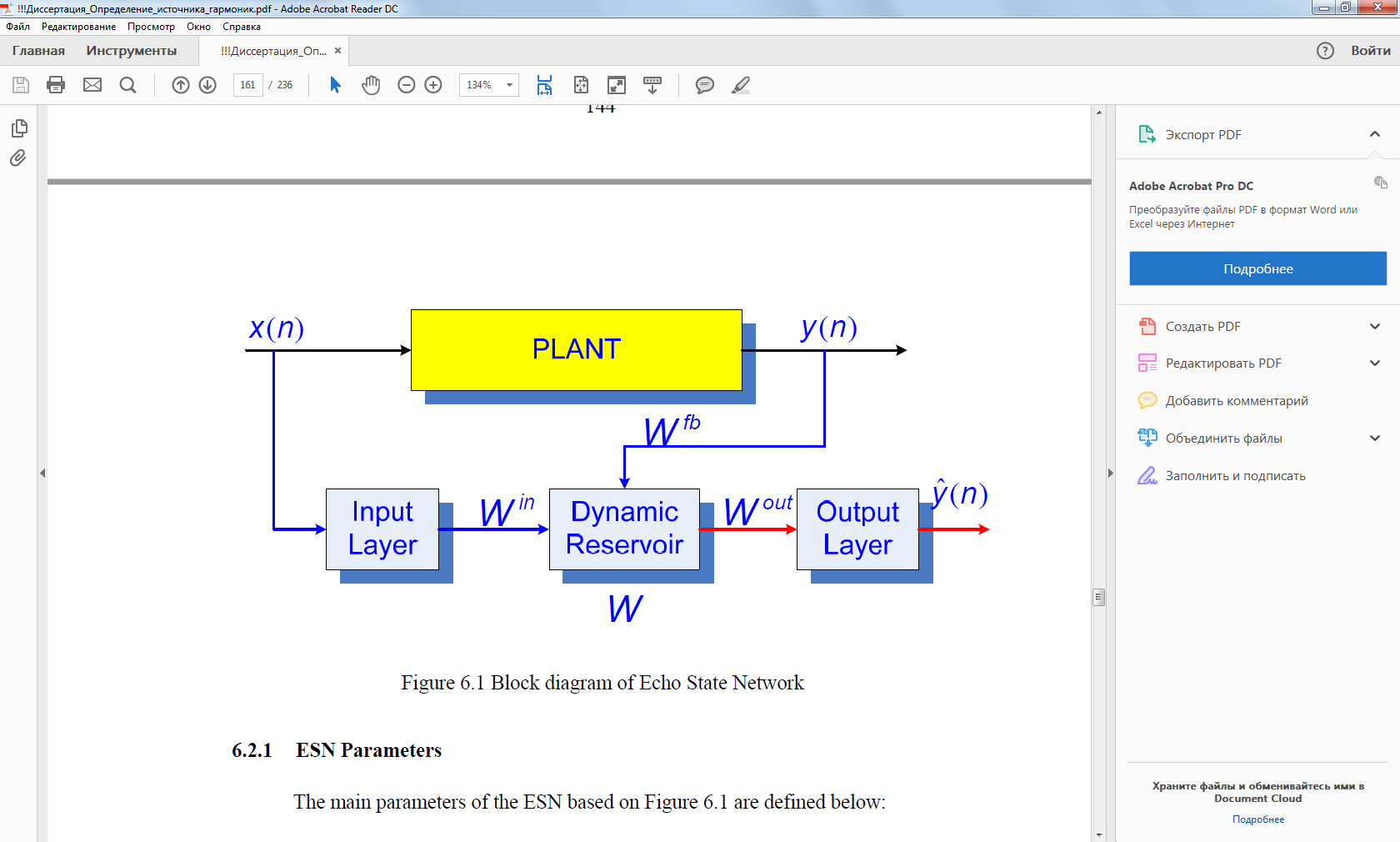
Рисунок 1 – Блок-схема эхо сетей
1.1 Параметры ESN
Основные параметры ESN определены ниже:
• дискретное время входной последовательности х и соответствующая выходная последовательность у.
• входные K нейроны, т. е., 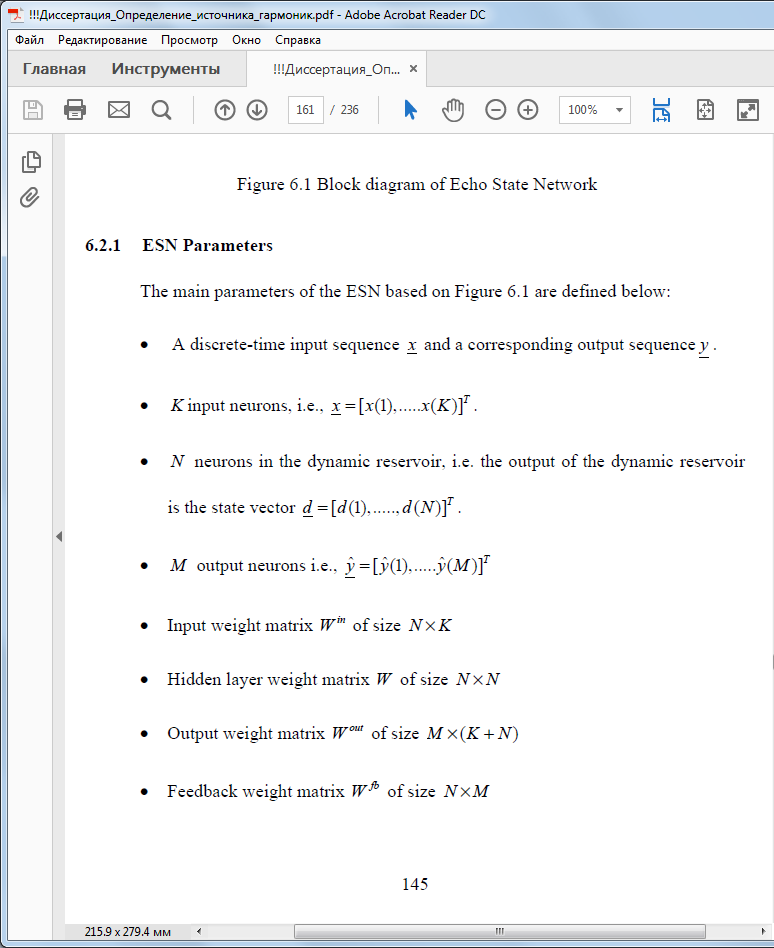
• N нейронов в динамическом резервуаре, то есть выходной сигнал динамического резервуара вектор состояния 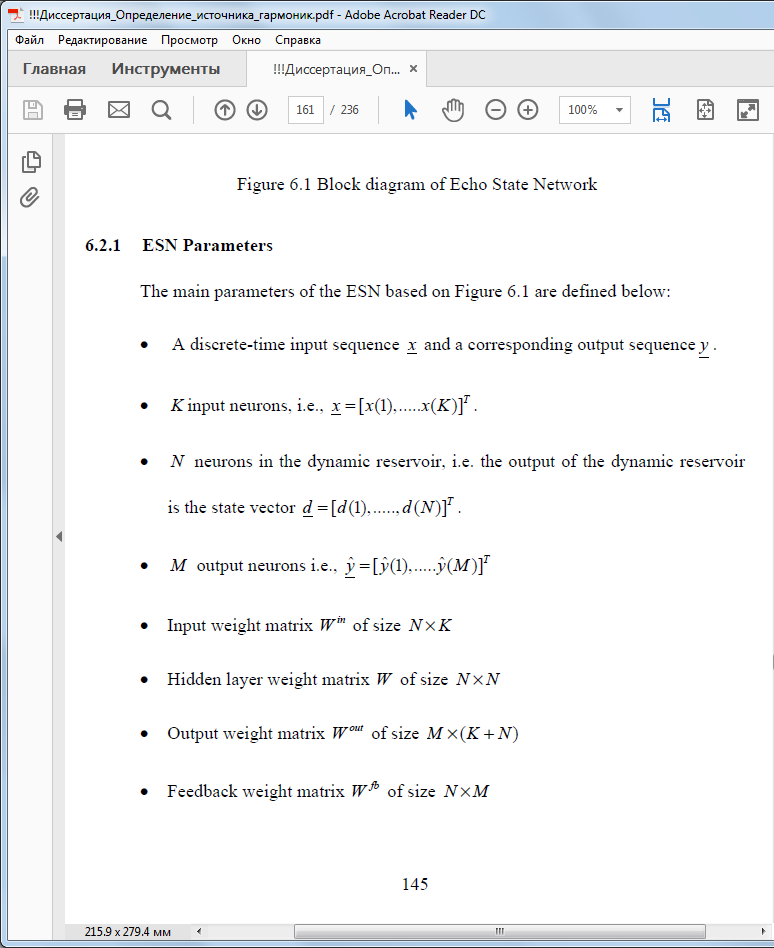 .
.
• выходные нейроны M т. е. 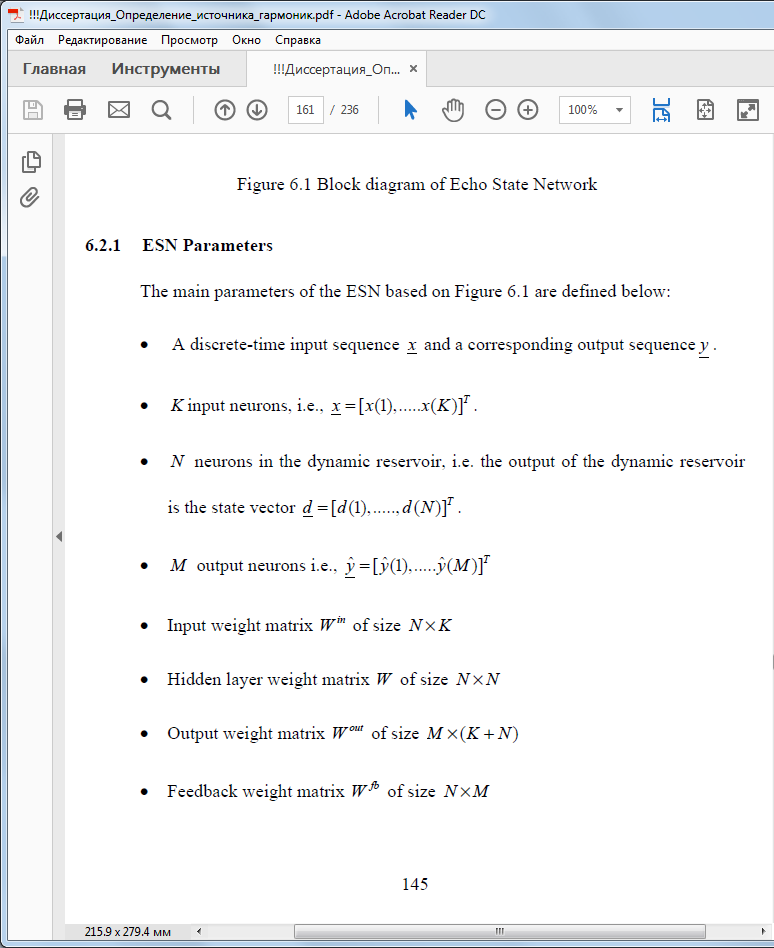
• Входная матрица нагрузки ![]()
![]() размера N Ч K
размера N Ч K
• Скрытая матрица нагрузки слоя ![]()
![]() размера N Ч N
размера N Ч N
• Выход матрицы нагрузки ![]()
![]() размера M Ч (K + N)
размера M Ч (K + N)
• Обратная связь матрицы нагрузки ![]()
![]() размера N Ч M
размера N Ч M
• Функция активации сигмоидного типа для динамического водохранилища
1.2 Теория ESN
Ключом к пониманию обучения ESN является понятие эхо-состояний [130], [131]. Наличие эхо-состояния (или не имея их) является свойством сети до обучения, что есть свойство матрицы нагрузки ![]()
![]() ,
, ![]()
![]() и
и ![]()
![]() . Интуитивно понятно, что свойство эхо состояния говорит, "если сеть была запущена в течение очень долгого времени [от времени минус бесконечность в определении], текущее состояние сети однозначно определяется историей входа и вынужденный обучением ".
. Интуитивно понятно, что свойство эхо состояния говорит, "если сеть была запущена в течение очень долгого времени [от времени минус бесконечность в определении], текущее состояние сети однозначно определяется историей входа и вынужденный обучением ".
Часто утверждается, несколько вольно, что обученная сеть (![]()
![]() ,
, ![]()
![]() , ) является отголоском эхо состояния сети, если её необученное "ядро" (
, ) является отголоском эхо состояния сети, если её необученное "ядро" (![]()
![]() ,
, ![]()
![]() и
и ![]()
![]() ) имеет эхо состояние относительно ввода / вывода из любого компактного интервала X Ч Y.
) имеет эхо состояние относительно ввода / вывода из любого компактного интервала X Ч Y.
Одним из условий, указанных в качестве свойства заключения контракта состояния, как показано,
эквивалентно эхо состояниям.
1.3 Обучение ESN
Учитывая ESN и последовательности размещения ввода / вывода, сеть обучается, чтобы узнать,
характеристики. Доступные последовательности ввода / вывода разделены на три части:
• Начальная часть, которая не используется для обучения, но служит для избавления от начальных переходных процессов во внутренних состояниях сети.
• Учебная часть, которая используется в фактической процедуре обучения регулировки выходных нагрузок.
• Испытательная часть, которая используется для проверки вновь обученной сети на дополнительные данные. ![]()
![]() не используется во время тестирования.
не используется во время тестирования.
1.4 Процедура обучения
• Произвольное генерирование внутренней матрицы нагрузки ![]()
![]() . Матрица должна быть разреженной. Командой MATLAB для того же является sprand. Применить (4), чтобы получить W. Размер W зависит от длины обучающей последовательности
. Матрица должна быть разреженной. Командой MATLAB для того же является sprand. Применить (4), чтобы получить W. Размер W зависит от длины обучающей последовательности
 . По правилу большого пальца, N не должно превышать порядок величины от
. По правилу большого пальца, N не должно превышать порядок величины от ![]()
![]() до
до ![]()
![]() . В идеале ESNs подходят для периодических данных и такие данные N должны быть ближе к
. В идеале ESNs подходят для периодических данных и такие данные N должны быть ближе к ![]()
![]() .
.
• Случайным образом генерировать входные нагрузки ![]()
![]() и нагрузки обратной связи
и нагрузки обратной связи ![]()
![]() . Затем
. Затем
неподготовленные сети (![]()
![]() ,
, ![]()
![]() и
и ![]()
![]() ) являются отголоском состояние сети, независимо от того, как
) являются отголоском состояние сети, независимо от того, как ![]()
![]() и
и ![]()
![]() выбраны.
выбраны.
• Спектральный радиус б зависит от применения и должен быть вручную настроен. Исходное значение A равно 0,8.
• Следующим шагом будет изучение динамики сети. Это механический шаг и не требует вмешательства эвристики. В первую очередь, внутренние сети вектора состояния d инициализации нулевого состояния,
т. е. d(0) = 0
• Управляйте сетью с помощью обучающих данных для времени n = 0, ... T, выдавая вход х (n) и приводя выходной у (n -1) к динамическому резервуару. Новое состояние сети для следующего временного шага вычисляется;
• Информация от первоначальных шагов,
 не используется для обучения, потому что динамика работы в сети частично определяется начальной произвольной начиная состоянием d(0) = 0. По времени
не используется для обучения, потому что динамика работы в сети частично определяется начальной произвольной начиная состоянием d(0) = 0. По времени ![]()
![]() , эффекты произвольного начального состояния исчезают (затухают). В качестве примера, для последовательности данных 500 точек,
, эффекты произвольного начального состояния исчезают (затухают). В качестве примера, для последовательности данных 500 точек, ![]()
![]() может быть установлен на 100.
может быть установлен на 100.
Это известно как начальное время размыва.
• В течение каждого раза, больше или равного, чем начальное время размытия ![]()
![]() , собирают вход х (n) и состояния сети d (n) в виде новой строки в матрице состояния сбора M. В конце концов, размер M получается
, собирают вход х (n) и состояния сети d (n) в виде новой строки в матрице состояния сбора M. В конце концов, размер M получается![]()
![]()
• Аналогичным образом, каждый раз, больше или равного, чем начальное время размытия ![]()
![]() , сигмовидный инверсный выход
, сигмовидный инверсный выход ![]()
![]() собирается матрицу Т размером
собирается матрицу Т размером ![]()
![]() (это не следует путать с заключительным шагом по времени, также обозначается как T).
(это не следует путать с заключительным шагом по времени, также обозначается как T).
• После того, как обучение закончится, умножаем псевдоинверсию М с Т, чтобы ![]()
![]() размера матрицы
размера матрицы ![]()
![]() .
.
1.5 Процедура тестирования
• Сеть (![]()
![]() и
и ![]()
![]() ) теперь готова к использованию. Она может управляться с помощью новых входных последовательностей х (п) и используя уравнение выхода, получается предсказывание выхода. Выходной сигнал в момент времени n+1 вычисляется как;
) теперь готова к использованию. Она может управляться с помощью новых входных последовательностей х (п) и используя уравнение выхода, получается предсказывание выхода. Выходной сигнал в момент времени n+1 вычисляется как;
Здесь запятые означают векторную связь. Важно помнить, что уравнение вывода обновления не используется во время обучения, так как выходные нагрузки еще не установлены их окончательные значения. Вместо того, выходные узлы просто переписаны выходной частью последовательности ввода / вывода.
• Теперь выход системы приближается к фактической мощности системы с помощью уравнения,
Более конкретно, выходные нагрузки вычисляются таким образом, что среднее квадратическое отклонение обучения сводится к минимуму.
где r - длина последовательности ввода-вывода, используемой для тестирования.
2 Результаты экспериментов с ESN
Для иллюстрации, схема применяется на переменной скорости трехфазного привода на одно основание фазы. Привод поставляется от источника утилиты, а также от чистого источника питания. Чистый источник энергии является тем же самым HG. HG способен выводить напряжения с программируемыми уровнями искажения и близкие к нулю внутренние сопротивления. На рисунке 2 показана экспериментальная установка.
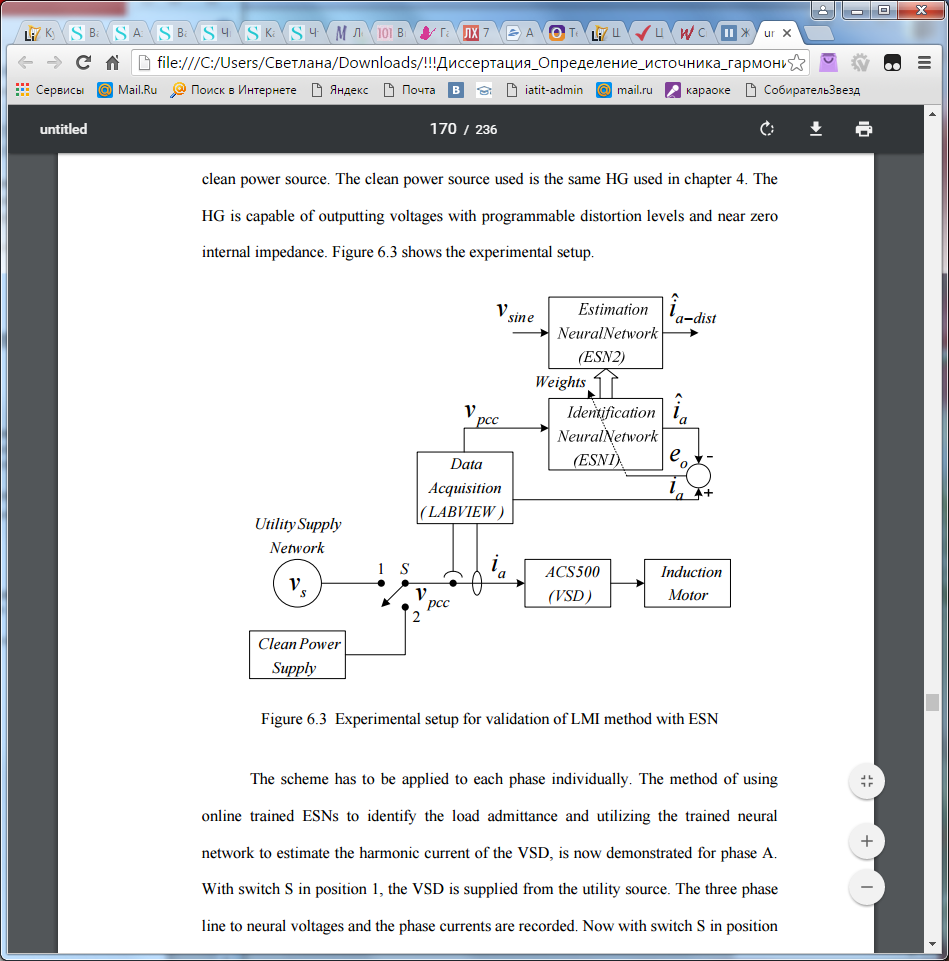
Рисунок 2 – Экспериментальная установка для проверки метода LMI с ESN
Схема должна быть применена к каждой фазе в отдельности. Способ использования онлайн-обучения ESNs для идентификации допуска нагрузки и использования обученной нейронной сети для оценки синусоидального токаVSD (преобразователя частоты), теперь демонстрировано для фазы А.
С помощью переключателя S в положении 1 , VSD(преобразователь частоты) подается от источника утилиты. Три фазы линии нейронных напряжений и токов фаз записываются. Теперь с помощью переключателя S в положении 2 , привод подается от чистого источника энергии. Измеренная фаза напряжения и осциллограммы тока с переключателем в положении 1, показаны на рисунке 2.
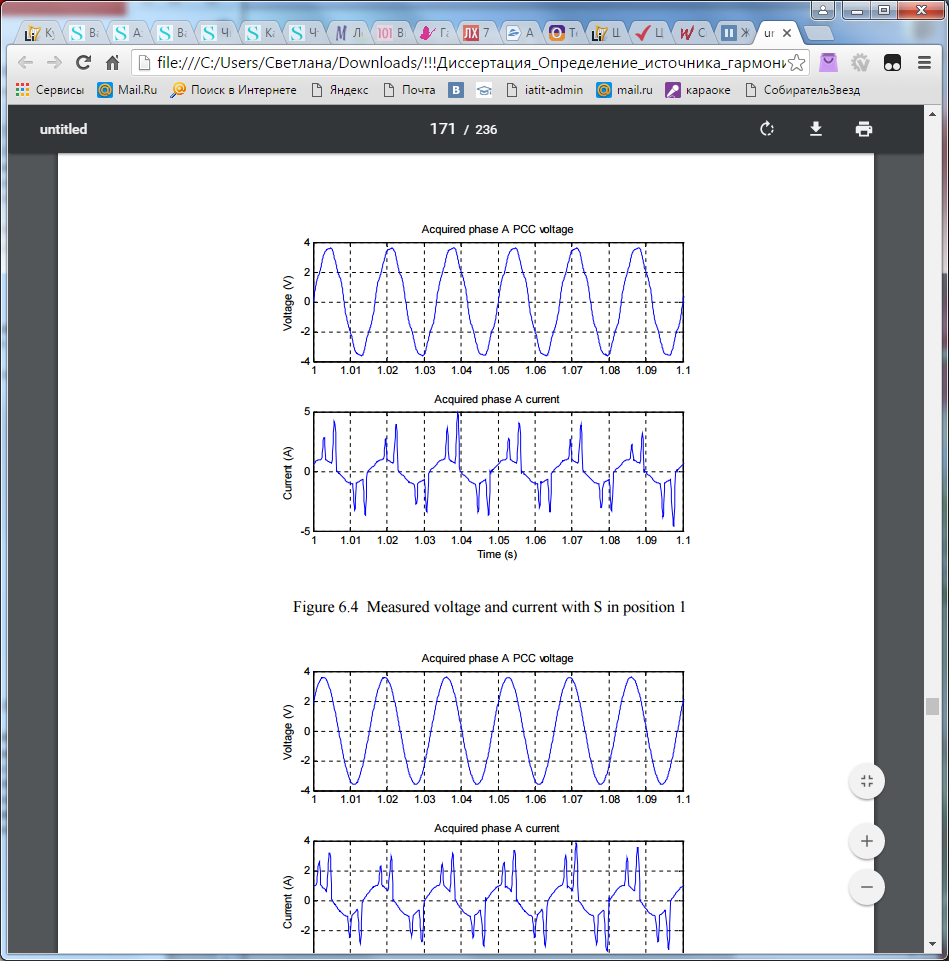
Рисунок 3 – Измеренное напряжение и ток с S в положении 1
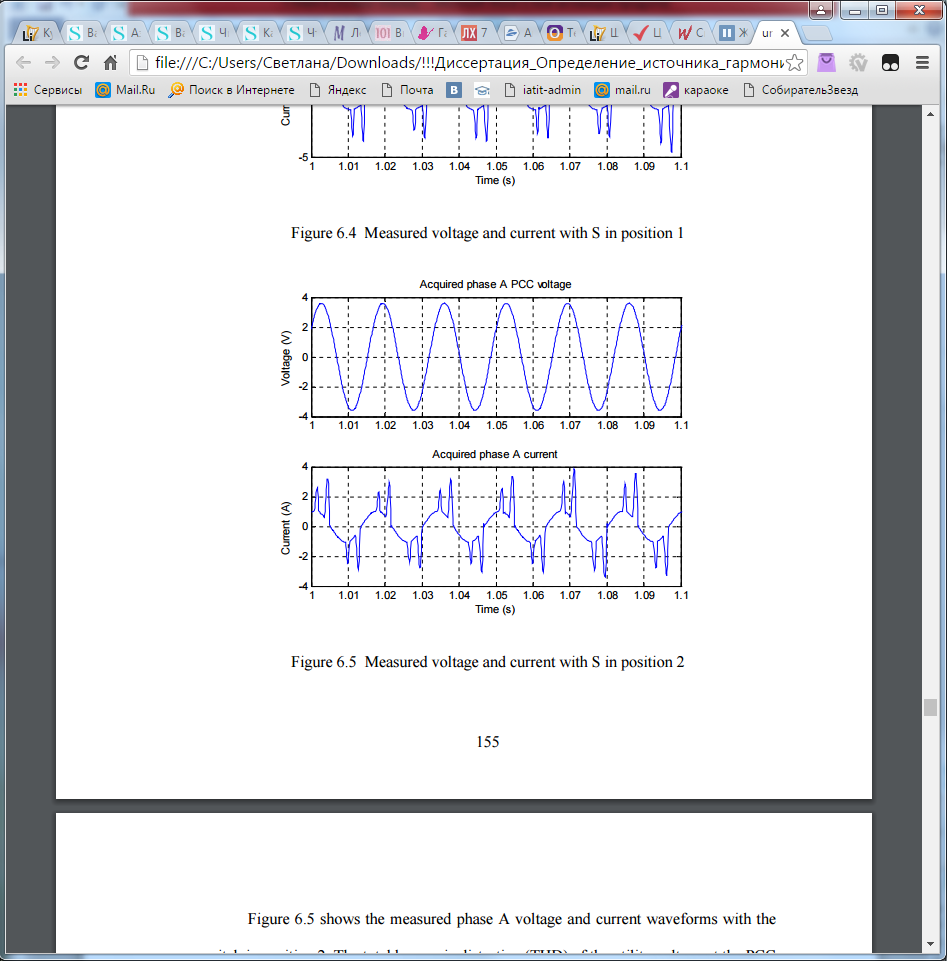
Рисунок 4 – Измеренное напряжение и ток с S в положении 2
На рисунке 3 показана измеренная фаза А напряжения и тока с переключателем в положении 2. Общий коэффициент гармонических искажений (THD) от сетевого напряжения на PCC составляет 4,5 %, а THD CI 5001 iX напряжения на PCC составляет 0,2 % (почти синусоидальный ) . В реальном применении в жизни, использование чистого источника питания не требуется для реализация этой схемы, и при этом такой источник питания не будет доступен.
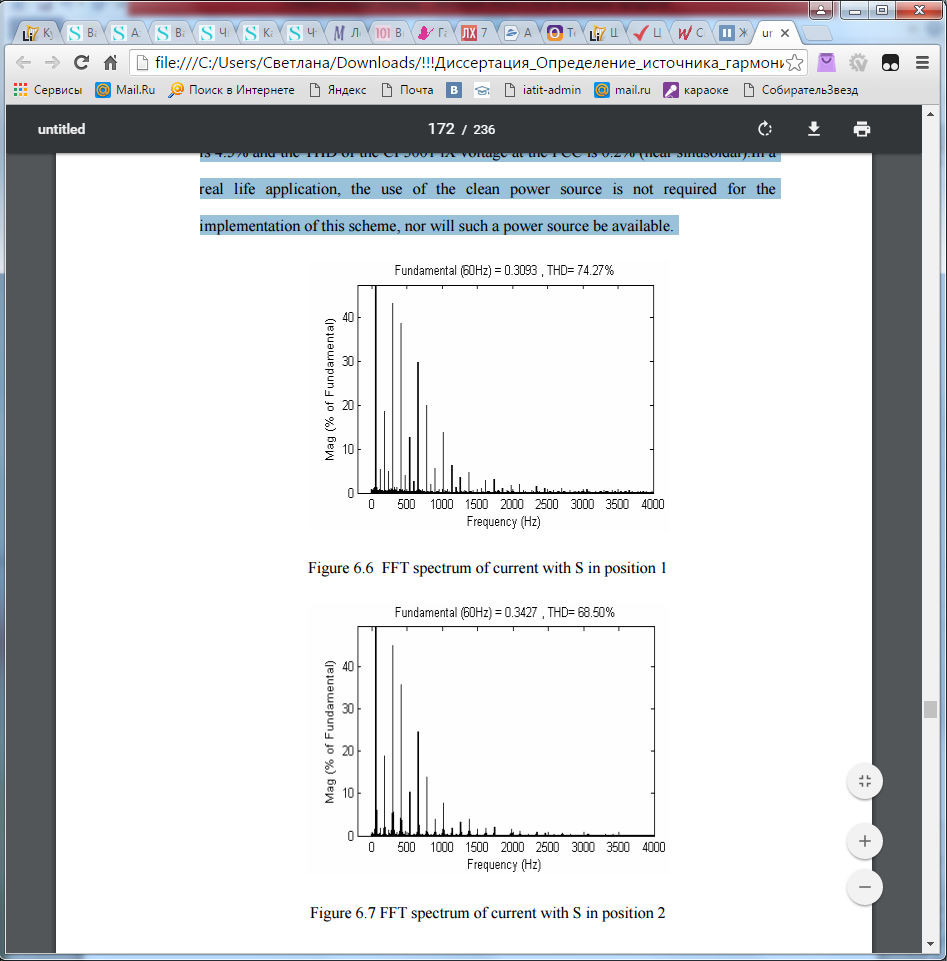
Рисунок 5 – FFT(БПФ) спектр тока с S в положении 1
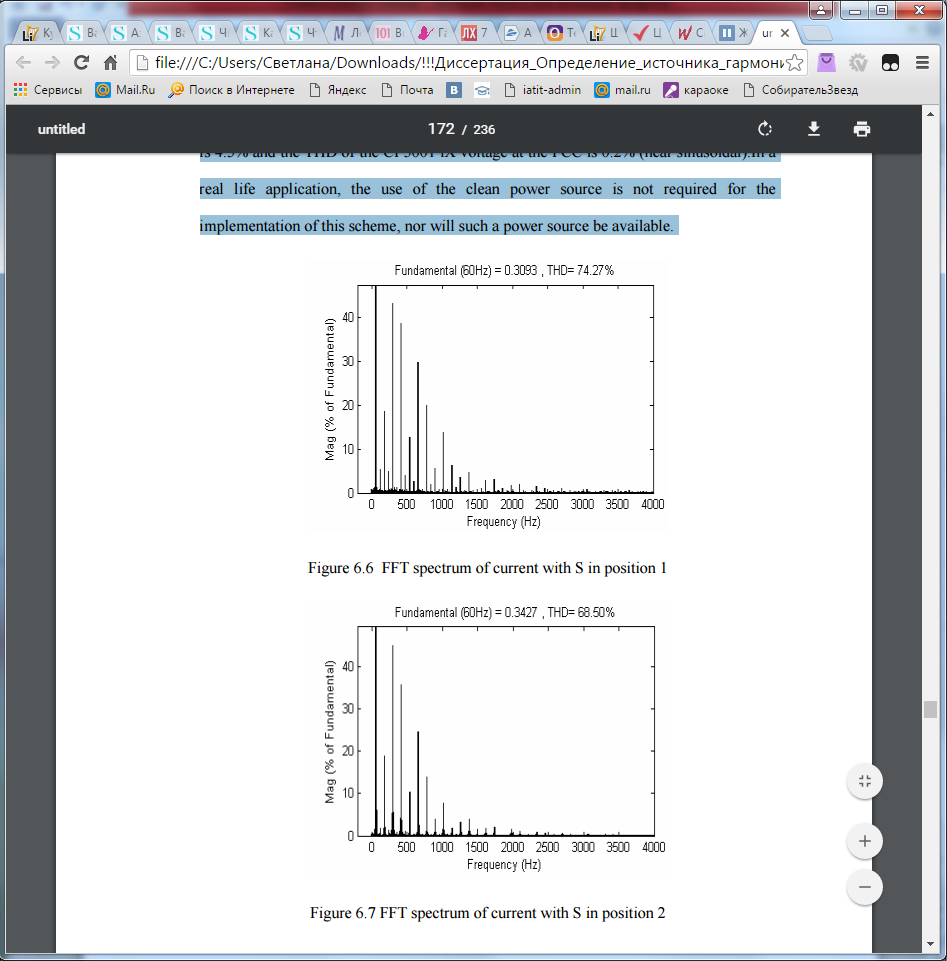
Рисунок 6 – FFT(БПФ) спектр тока с S в положении 2
THD (Коэффициент нелинейных искажений) тока нагрузки с выключателем S в положении 1 составляет 74,27 %, а THD (Коэффициент нелинейных искажений) тока нагрузки с выключателем S в положении 2 составляет 68,5 % . FFT(БПФ) спектры приведены на рисунке 5 и рисунке 6. Частота дискретизации для сбора данных установлена на уровне 128 образцов за один цикл. Динамический резервуар выполнен с 20 нейронами. Сбор данных осуществляется Национальной системой сбора данных. Преобразователи напряжения используются LEM LV. 25 - P и датчики тока используются LEM LAH 25 – NP. FFT(БПФ) полученных форм волны вычисляются с использованием блока PowerGUI Simulink. Динамический резервуар ESN построен с 20 нейронами.
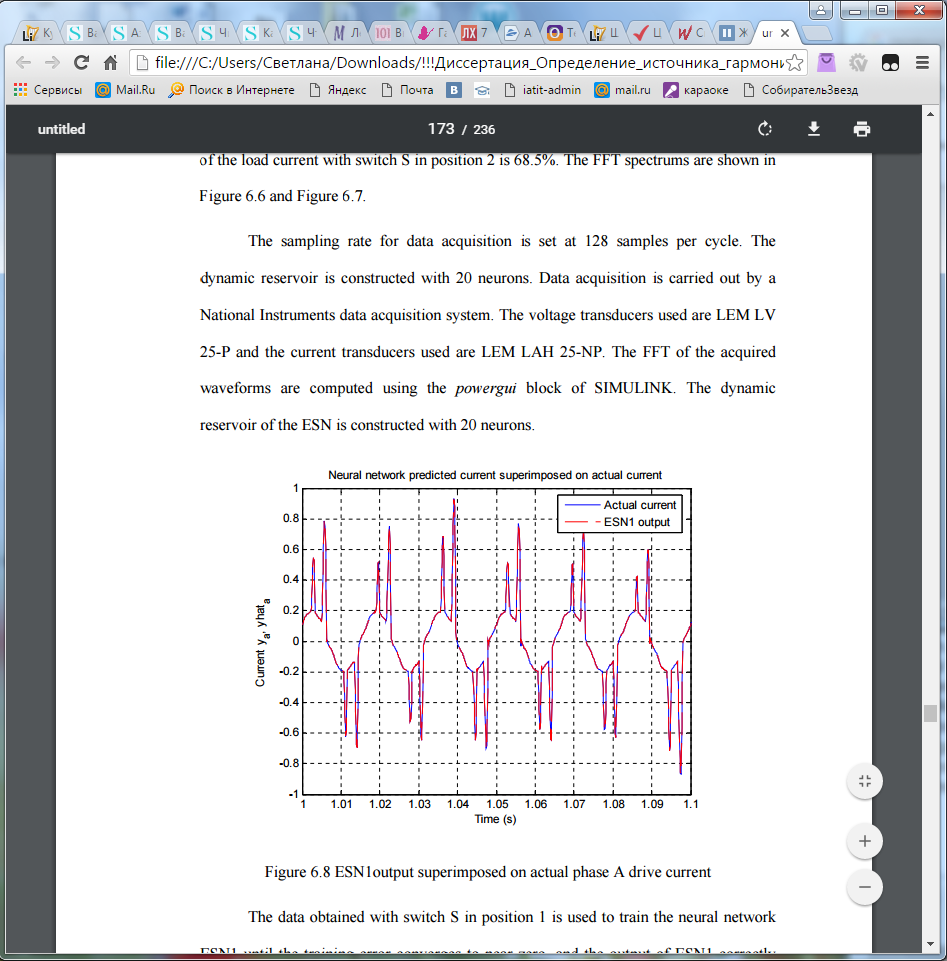
Рисунок 7 – Выход ESN1 накладывается на фактическую фазу тока возбуждения
Данные, полученные с помощью переключателя S в положении 1 используется для обучения нейронной сети ESN1 пока ошибка обучения не сходится почти к нулю, а выход ESN1 правильно отслеживает фактический ток ![]()
![]() . Рисунок 7 показывает результат обучения ESN1 путем создания графика
. Рисунок 7 показывает результат обучения ESN1 путем создания графика ![]()
![]() совпадающего с фактическим
совпадающего с фактическим ![]()
![]() сигнала. Сходимость обучения также проверена с учетом MSE ESN1 на рисунке 8.
сигнала. Сходимость обучения также проверена с учетом MSE ESN1 на рисунке 8.
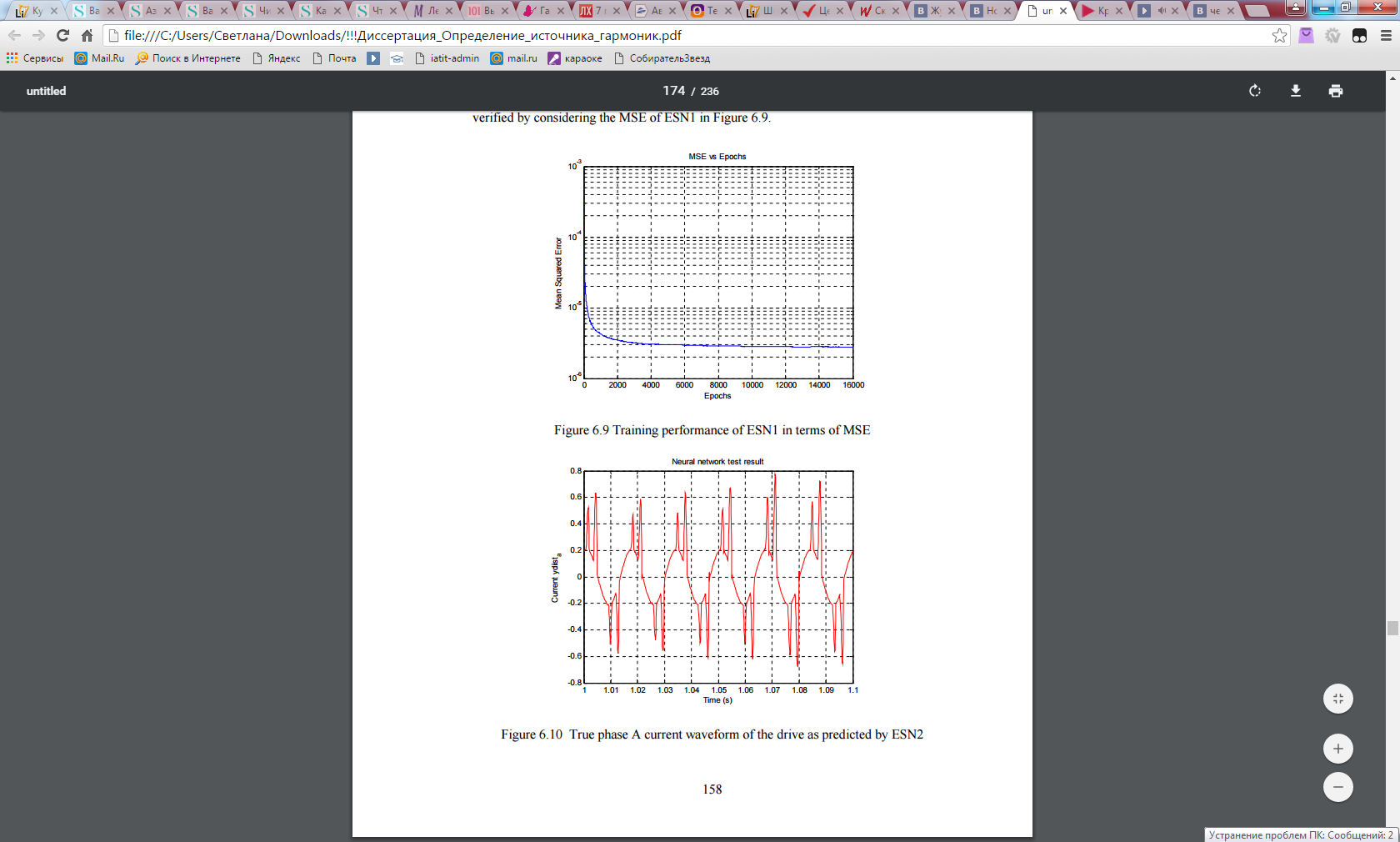
Рисунок 8 – Производительность обучения ESN1 с точки зрения MSE
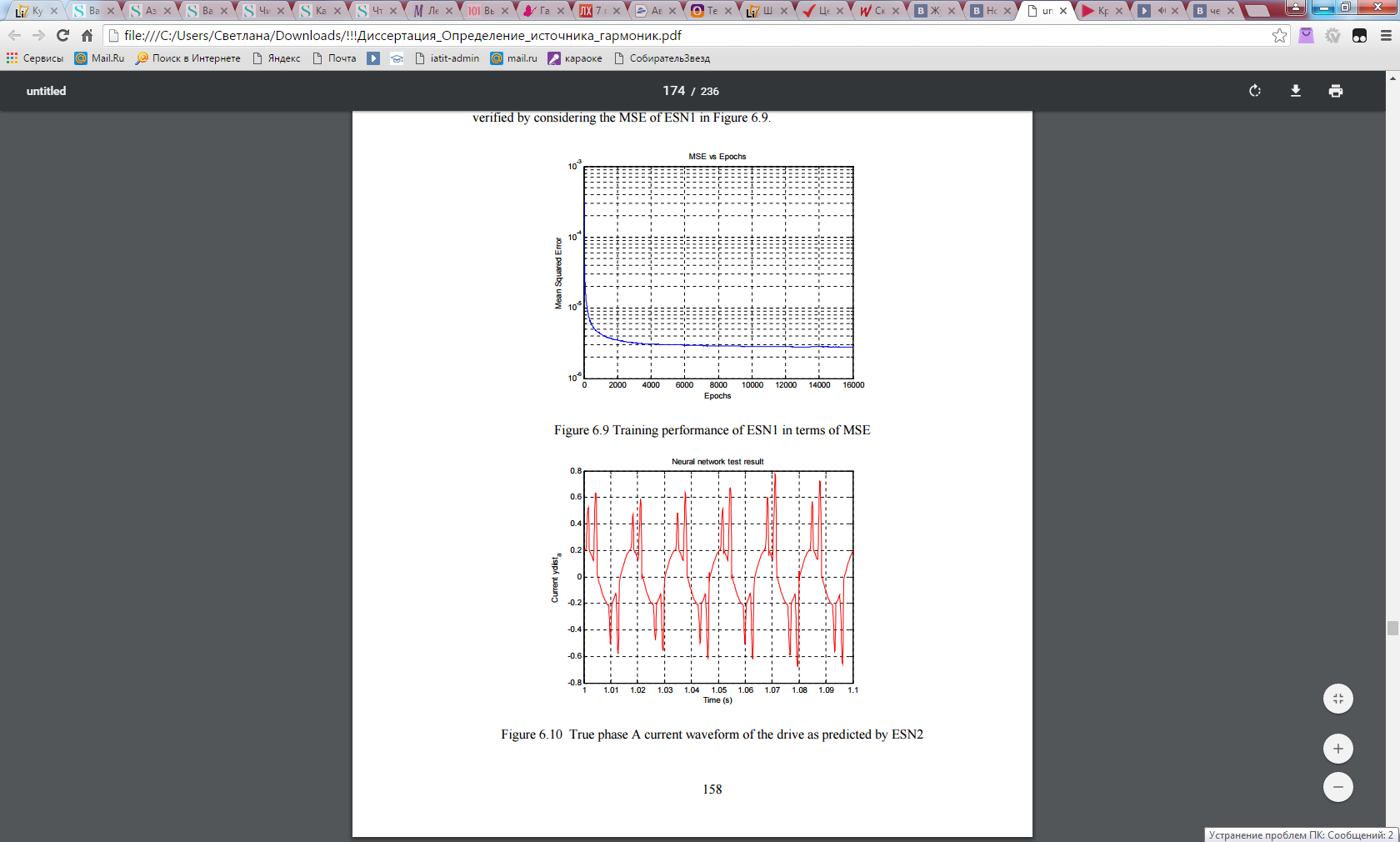
Рисунок 9 – Истинная фаза А формы кривой тока привода, как предсказано ESN2
После того, как ESN1 изучил допуск фазы А преобразователя частоты VSD, нагрузки ESN1 передаются ESN2 . ESN2 поставляется с чистого синусоидального напряжения. Выходной сигнал ESN2 ![]()
![]() на рисунке 9 показывает, как на рис 2 выглядел бы, если бы было возможно изолировать VSD и поставлять его из чистой синусоидальной волны.
на рисунке 9 показывает, как на рис 2 выглядел бы, если бы было возможно изолировать VSD и поставлять его из чистой синусоидальной волны.
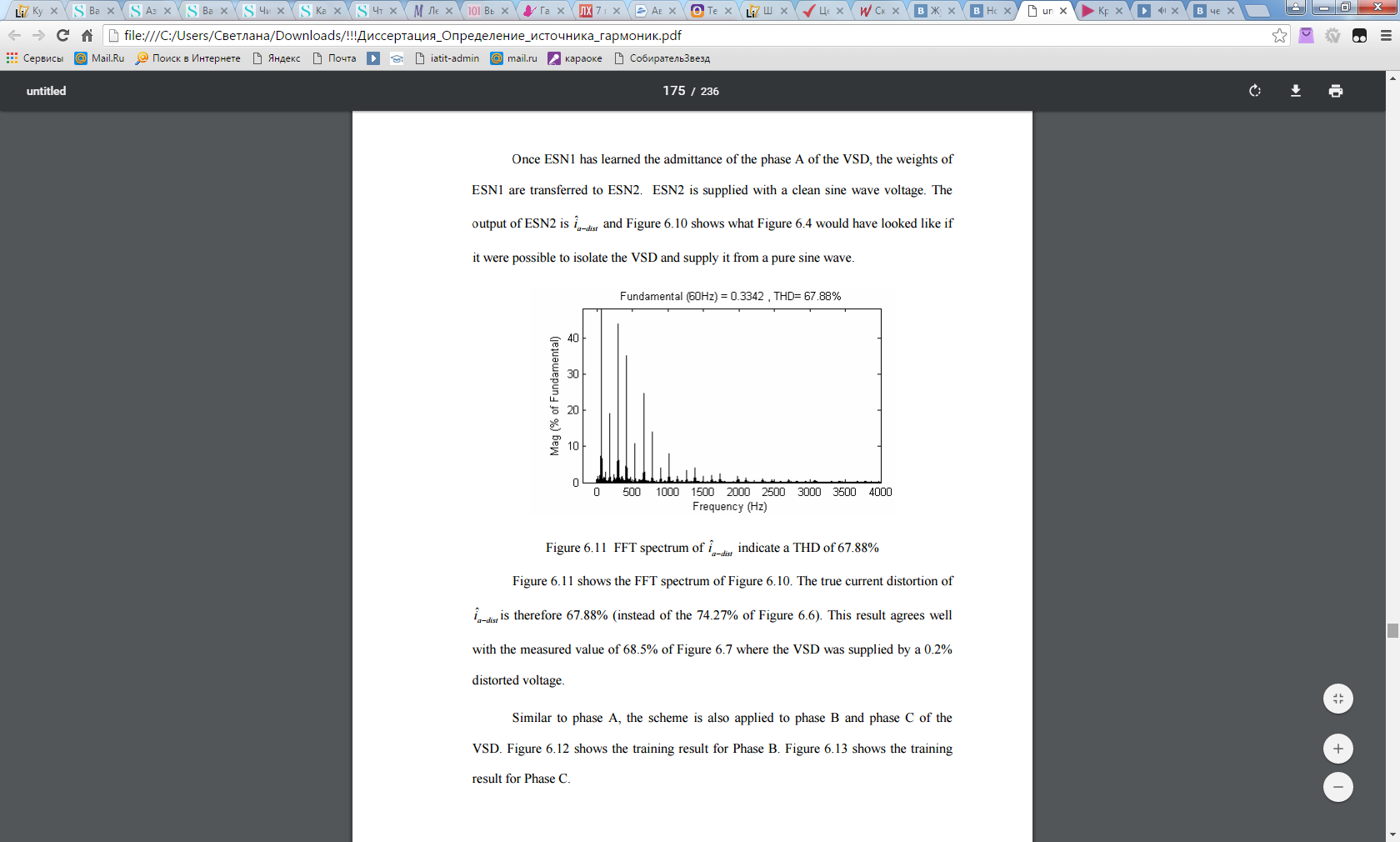
Рисунок 10 – FFT(БПФ) спектр ![]()
![]() указывает на THD 67.88 %
указывает на THD 67.88 %
Рисунок 10 показывает FFT(БПФ) спектр рисунка 9 . Истинное искажение тока ![]()
![]() - поэтому 67,88 % (вместо 74,27 % на рис 6.6 ) . Этот результат хорошо согласуется с измеренным значением 68,5% рисунка 6 , где преобразователь частоты поставлялся на 0,2% искаженным напряжением. Подобно фазе А, схема также применяется к фазе В и фазе С VSD. Рисунок 11 показывает результат обучения для фазы В. Рисунок 12 показывает результат обучения для фазы C.
- поэтому 67,88 % (вместо 74,27 % на рис 6.6 ) . Этот результат хорошо согласуется с измеренным значением 68,5% рисунка 6 , где преобразователь частоты поставлялся на 0,2% искаженным напряжением. Подобно фазе А, схема также применяется к фазе В и фазе С VSD. Рисунок 11 показывает результат обучения для фазы В. Рисунок 12 показывает результат обучения для фазы C.
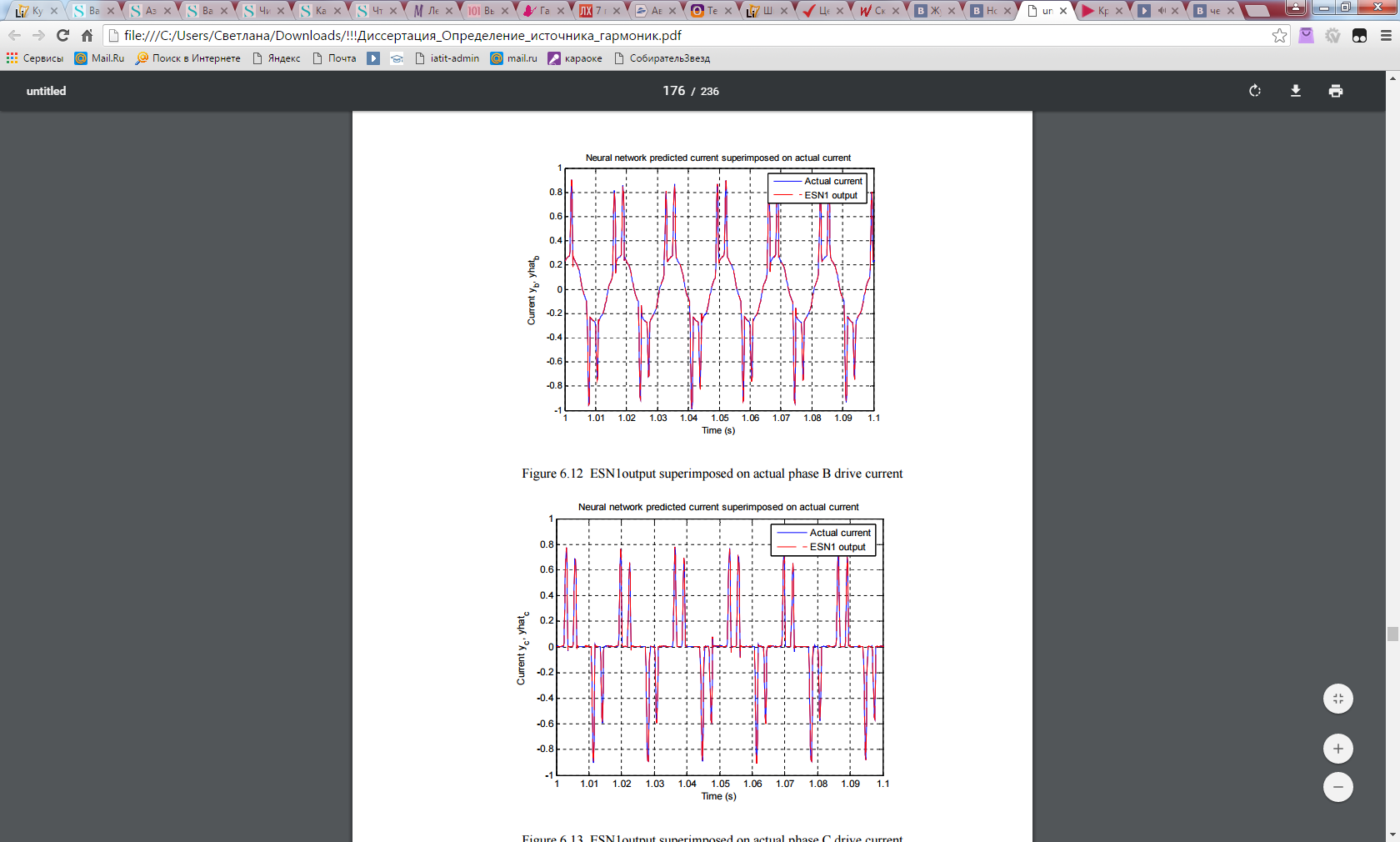
Рисунок 11 – Выход ESN1 накладывается на фактический ток фазы B привода
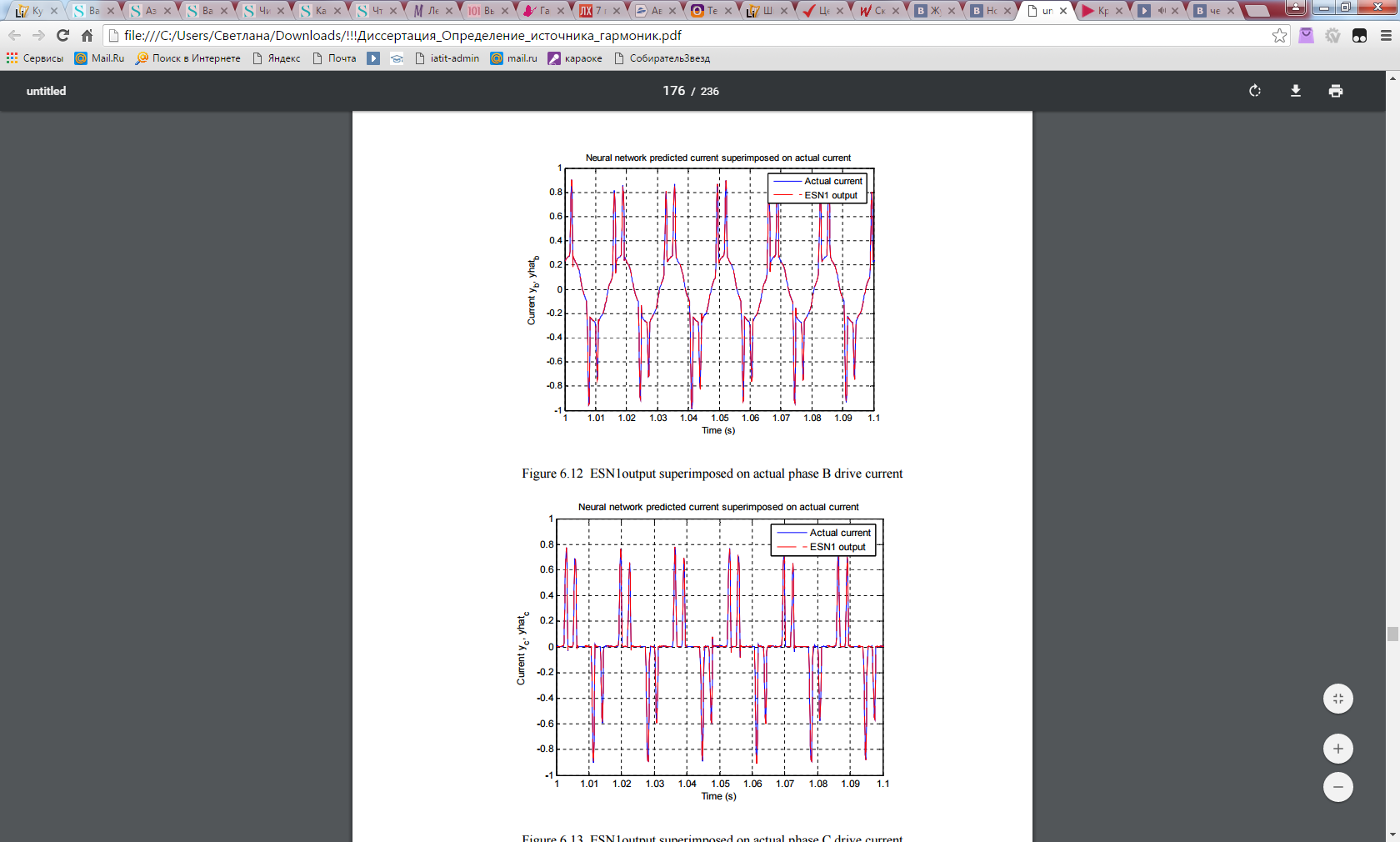
Рисунок 12 – Выход ESN1 накладывается на фактический ток фазы С привода
Параметр 
 , введенный в главе 4 вычисляется для всех трех фаз, результаты сведены в таблице 6.1.
, введенный в главе 4 вычисляется для всех трех фаз, результаты сведены в таблице 6.1.
Заключение
В этой работе исследуется применение нового вида рекуррентной(повторяющейся) нейронной сети под названием Эхо-состояние сетей (ESNs) для задачи измерения фактического количества синусоидального тока, введенного в электрическую сеть с помощью нелинейной нагрузки. Способность к обучению ESN демонстрируется путем обучения его идентификации нелинейных характеристик преобразователя частоты VSD. Принципы ESN основаны на использовании рекуррентной(повторяющейся) нейронной сети (RНН) в качестве динамического резервуара. Для того, чтобы вычислить желаемый результат динамики, рассчитываются только нагрузки соединений из резервуара на устройства вывода. Это просто задача линейной регрессии. Размер динамического резервуара сохраняется аналогично скрытому слою топологий нейронной сети. Вопросы онлайн–обучения ESNs все еще нуждаются в исследовании. Однако преимущество использования ESNs заключается в том, что они обеспечивают более простой метод обучения RHH и возможность использования динамического резервуара с гораздо более высоким числом нейронов по сравнению с MLPNs или RNNs.
