

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 519.7
И. Б. ФУРТАТ, А. Н. НЕХОРОШИХ
(ИПМаш РАН, Университет ИТМО, Санкт-Петербург)
УПРАВЛЕНИЕ ЭЛЕКТРИЧЕСКИМ ГЕНЕРАТОРОМ В УСЛОВИЯХ ВЫСОКОЧАСТОТНЫХ ПОМЕХ ИЗМЕРЕНИЯ
Рассматривается задача робастного управления электрическим генератором по углу нагрузки при воздействии внешних ограниченных возмущений и наличии высокочастотных помех измерения. Предложенный алгоритм позволяет уменьшить влияние помехи на выходную переменную, а также компенсирует параметрические неопределенности и внешние возмущения. Приведены результаты численного моделирования электрогенератора.
Введение
На сегодняшний день одной из фундаментальных проблем в теории управления является качественное и эффективное управление процессами генерации электроэнергии. Необходимым условием для качественного управления энергосистемами является создание простых и надежных регуляторов для управления электрическими генераторами. На сегодняшний день предложено уже достаточное количество решений этой задачи. Так, на базе нелинейной модели [4,7,11] в [10,13] рассмотрено управление электрическим генератором с шинами бесконечной мощности (single machine infinite bus) при кратковременных аварийных ситуациях, связанных со значительным изменением реактивного сопротивления линии электропередачи. Для решения задачи сначала предлагается использовать линеаризацию обратной связью. Однако для линеаризации обратной связью необходимо знать параметры генератора, которые могут меняться в процессе его функционирования.
В [5] для управления электрическим генератором авторы представляют его модель через гамильтониан системы. Очевидно, что при реализации такого алгоритма необходимо точное знание всех параметров модели и измерение всех функций. В [2] предложен нелинейный адаптивный закон управления генератором при условии измерения вектора состояния, математическая модель которого расширена до системы дифференциальных уравнений седьмого порядка [1].
Из вышеперечисленного видно, что по-прежнему остается актуальным вопрос управления
генератором в условиях его априорной, параметрической и функциональной неопределенностях. К тому же возникает интерес решить задачу управления генератором, где измерению был бы доступен только угол нагрузки ротора.
Одним из распространенных способов для решения задачи управления в условиях неопределенностей является синтез регуляторов с использованием оценок производных регулируемой переменной на базе наблюдателя с большим коэффициентом усиления (high-gain observer). Впервые наблюдатель с большим коэффициентом усиления был предложен в [8,9] для минимально-фазовых объектов, размерность которого не ниже, чем γ – 1, где γ – относительная степень объекта управления.
Однако при наличии высокочастотных помех измерений применение наблюдателя с большим коэффициентом усиления может быть неудовлетворительным. Проблема заключается в том, что значение оценки производной регулируемой переменной может существенно превышать ее истинного значения.
В [6,12] предложен новый наблюдатель, который является расширением наблюдателя с большим коэффициентом усиления [8] на случай высокочастотных помех измерения. При этом размерность нового наблюдателя равна 2γ – 2. Увеличение размерности наблюдателя [6,12] в 2 раза, по сравнению с наблюдателем [8], связано с введением дополнительных дифференциальных уравнений, компенсирующих влияние высокочастотной помехи измерения.
В докладе рассматривается модель генератора, предложенная в [4,7,11]. Предполагается, что начальные условия, параметры и функции генератора неизвестны. Решена задача робастного управления при условии измерения только угла нагрузки генератора в условиях высокочастотных помех измерения. Цель управления состоит в стабилизации угла генератора с заданной точностью в номинальном режиме и кратковременных аварийных ситуациях. Для решения задачи предлагается использовать подход, основанный на разделении фильтрующих и оценивающих свойств в виде двух независимых алгоритмов, в отличие от [6,12]. Приведены результаты численного моделирования системы управления электрогенератором, иллюстрирующие эффективность разработанного алгоритма по сравнению с классическим наблюдателем с большим коэффициентом усиления [8] и наблюдателем с большим коэффициентом усиления в условиях помех измерения [6,12].
Постановка задачи
Рассмотрим электрический генератор, модель которого описывается следующими дифференциально-алгебраическими уравнениями [4,7,11].
Уравнения движения ротора генератора
![]() (1)
(1)
![]() (2)
(2)
где δ(t) – угол поворота ротора относительно синхронной оси вращения, рад; ω(t) – относительная скорость вращения ротора, рад/с; ΔPe(t) = Pe(t) – Pm, отн. ед.; Pe(t) – активная электрическая мощность, вырабатываемая генератором, отн. ед.; Pm – механическая мощность, вращающая ротор, отн. ед.; D – коэффициент демпфирования, отн. ед.; H – коэффициент инерции, с; щ0 – синхронная скорость вращения ротора, рад/с.
Уравнение электродинамики генератора
![]() (3)
(3)
где ![]() – переходная ЭДС вдоль квадратурной оси, отн. ед.; Eq(t) – ЭДС генератора вдоль квадратурной оси, отн. ед.; Ef(t) – эквивалентная ЭДС обмотки возбуждения, отн. ед.; Td0 – постоянная времени вдоль продольной оси при коротком замыкании, с.
– переходная ЭДС вдоль квадратурной оси, отн. ед.; Eq(t) – ЭДС генератора вдоль квадратурной оси, отн. ед.; Ef(t) – эквивалентная ЭДС обмотки возбуждения, отн. ед.; Td0 – постоянная времени вдоль продольной оси при коротком замыкании, с.
Электрические уравнения генератора
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
где uf(t) – сигнал управления напряжением возбуждения, отн. ед.; kc – коэффициент усиления напряжения возбуждения; Vs – напряжение на шинах бесконечной мощности, отн. ед.; Qe(t) – реактивная мощность, вырабатываемая генератором, отн. ед.; Iq(t) – сила тока вдоль квадратурной оси, отн. ед.; ![]() ,
, ![]() ; xT – реактивное сопротивление трансформатора, отн. ед.; xL – реактивное сопротивление одной из линий электропередач, отн. ед.; xd – реактивное сопротивление вдоль продольной оси, отн. ед.; x'd – переходное реактивное сопротивление вдоль продольной оси, отн. ед.
; xT – реактивное сопротивление трансформатора, отн. ед.; xL – реактивное сопротивление одной из линий электропередач, отн. ед.; xd – реактивное сопротивление вдоль продольной оси, отн. ед.; x'd – переходное реактивное сопротивление вдоль продольной оси, отн. ед.
Введем следующие предположения.
Неизвестные параметры модели (1)–(8) образуют вектор х ∈ Ξ, где Ξ – заданное ограниченное множество. В процессе функционирования генератора могут произойти кратковременные аварийные ситуации, связанные с внезапным изменением реактивного сопротивления линии электропередачи xL. Измерению доступен только сигнал y(t), представляющий собой показания угла ротора содержат δ(t) с аддитивной высокочастотной помехой w(t).Требуется спроектировать непрерывную систему управления, обеспечивающую выполнение целевого условия
![]() (9)
(9)
где е > 0 – точность регулирования; T – время, по истечении которого с начала работы системы должно выполняться целевое условие, с; δ0 – требуемое значение угла нагрузки, рад.
Метод решения
Найдем производную функции ΔPe(t) = Pe(t) – Pm с учетом уравнений (4)–(8):
 (10)
(10)
где ![]() .
.
Введем следующие обозначения:
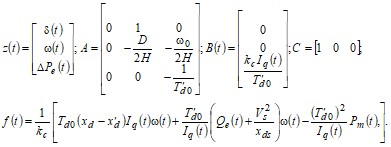 (11)
(11)
Перепишем уравнения (1), (2), (10) с учетом обозначений (11)
![]() (12)
(12)
Согласно предположению 3 показания угла нагрузки δ(t) содержат высокочастотную помеху w(t). Преобразуем уравнение (12) к форме вход-выход с учетом данного замечания
![]() (13)
(13)
где Q(p), ![]() – нормированные линейные дифференциальные операторы порядков n = 4 и m = 1 соответственно, полученные при переходе от (12) к (13); k > 0; p = d/dt – оператор дифференцирования.
– нормированные линейные дифференциальные операторы порядков n = 4 и m = 1 соответственно, полученные при переходе от (12) к (13); k > 0; p = d/dt – оператор дифференцирования.
Разложим оператор ![]() на составляющие
на составляющие
![]() (14)
(14)
где R(p) – произвольный стационарный линейный дифференциальный оператор порядка m = 1; ΔR(p, t) – остаток разложения. Учитывая разложение (14), перепишем (13) в виде
![]() (15)
(15)
где ![]() – функция, содержащая в себе неопределенности объекта.
– функция, содержащая в себе неопределенности объекта.
Для выделения сигнала δ(t) из сигнала y(t) рассмотрим следующий алгоритм
![]() (16)
(16)
где σi > 0; μ > 0 – малый параметр; ![]() – оценка сигнала δ(t).
– оценка сигнала δ(t).
Для дальнейшего синтеза системы управления воспользуемся алгоритмом [3]. Из постановки задачи следуем, что производные y(t) не доступны измерению (предположение 3). Тогда зададим закон управления в форме
![]() (17)
(17)
где α > 0, коэффициенты d0, d1, …, ![]() выбираются так, чтобы полином
выбираются так, чтобы полином ![]() был гурвицев, γ = n – m – относительная степень объекта управления,
был гурвицев, γ = n – m – относительная степень объекта управления, ![]() – оценка i-й производной сигнала
– оценка i-й производной сигнала ![]() , i = 0, 1, ..., γ – 1.
, i = 0, 1, ..., γ – 1.
Подставив (17) в (15), получим
![]() (18)
(18)
где ![]() ;
; ![]() ;
; ![]() . Значение функции g(t) зависит от качества оценивания производных сигнала
. Значение функции g(t) зависит от качества оценивания производных сигнала ![]() , значение функции ψ(t) – от качества фильтрации алгоритма (16). Поскольку известно множество Ξ (предположение 1) то всегда существует число α и полином D(λ) такие, что полином F(λ) будет гурвицевым.
, значение функции ψ(t) – от качества фильтрации алгоритма (16). Поскольку известно множество Ξ (предположение 1) то всегда существует число α и полином D(λ) такие, что полином F(λ) будет гурвицевым.
Для реализации закона управления (17) воспользуемся наблюдателем, заданным уравнениями
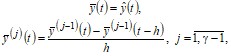 (19)
(19)
где h – время задержки.
Подставив (19) в (17), перепишем закон управления (17) в виде
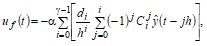 (20)
(20)
где ![]() Сформулируем утверждение, выполнение условий которого гарантирует выполнение целевого условия (9).
Сформулируем утверждение, выполнение условий которого гарантирует выполнение целевого условия (9).
Утверждение. Пусть выполнены условия предположений 1–3, помеха w(t) ограниченна, если r > γ, и ограниченна вместе с ее γ – r – 1 производными, если r ≤ γ . Тогда существуют числа α > 0 и h > 0 такие, что система управления, представленная алгоритмом (16) и законом управления (20) обеспечивает выполнение целевого условия (9) и ограниченность всех сигналов в замкнутой системе.
Результаты моделирования
Рассмотрим модель генератора (1)–(8). Класс неопределенности Ξ задан неравенствами [10,13]:

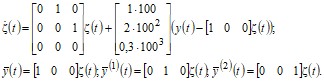
Выберем в (16) σi = 1, μ = 0,01, r = 4. Тогда алгоритм фильтрации (16) имеет следующий вид
![]() (21)
(21)
Пусть α = 1, d0 = 1, d1 = 0,5, d2 = 2. Тогда, закон управления (17) можно переписать в виде
![]() (22)
(22)
Для оценки производных в (21) воспользуемся наблюдателем (19). Пусть h = 1/30. Тогда наблюдаперепишем в виде
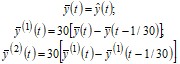 (23)
(23)
Продемонстрируем эффективность предложенной схемы (21)–(23) по сравнению с наблюдателем с большим коэффициентом усиления [8] и наблюдателем с большим коэффициентом усиления в условиях помех измерения [6,12]. Для этого зададим снова закон управления в виде (22), только для оценки производных в (22) воспользуемся следующими наблюдателями:
1) наблюдатель с большим коэффициентом усиления [8]:
 (24)
(24)
2) наблюдатель с большим коэффициентом усиления в условиях помех измерения [6,12]:
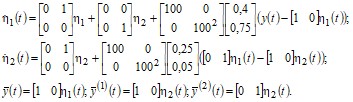 (25)
(25)
При моделировании рассмотрим аварийную ситуацию, связанную с внезапным изменением реактивного сопротивления линии передачи xL: до аварийной ситуации xL = 0,4853 отн. ед.; в момент времени t = 5 с xL = 0,4853/5 отн. ед.; при t = 5,5 c срабатывают блокираторы и подключают резервную линию передачи с с xL = 0,4853/5 отн. ед.
Выберем генератор (1)–(8), задав в нем параметры [10,13]: δ0 = 30°; ω0 = 314,159 рад/с; D = 5 отн. ед.; H = 8 с; Td0 = 6,9 c; kc = 1; xd = 1,863 отн. ед.; x'd = 0,257 отн. ед.; xT = 0,127 отн. ед.; Pm = 0,9 отн. ед.; Vs = 1 отн. ед.; δ(0) = 30°; ω(0) = 0 рад/с; E'q(0) = 1,0109 отн. ед.
Помеху w(t) зададим в следующем виде
![]() (26)
(26)
В таблице 1 приведены максимальные значения ошибок оценивания производных угла нагрузки ![]() при использовании разработанной системы (21)–(23), а также системы (22), (24) и системы (22), (25).
при использовании разработанной системы (21)–(23), а также системы (22), (24) и системы (22), (25).
Таблица 1
Максимальные значения ошибок оценивания производных угла нагрузки
Система управления | (21)–(23) | (22), (24) | (22), (25) |
| 0,0401 | 0,0302 | 0,0136 |
| 0,7740 | 5,8776 | 0,6939 |
| 20,0391 | 101,3180 | 20,7005 |
Из таблицы 1 видно, что использование предложенного алгоритма и наблюдателя с большим коэффициентом усиления в условиях помех измерения имеет схожий результат. В то время как использование наблюдателя с большим коэффициентом усиления доставляет оценку производных на порядок хуже.
На рисунках 1–3 приведены переходные процессы по углу ротора δ(t), относительной угловой скорости ω(t) и активной мощности ΔPe(t). Из рисунков видно, что использование всех схем управления приводит к стабилизации электрогенератора. Переходные процессы по углу ротора и относительной угловой скорости практически идентичны. Однако значение активной мощности в установившемся режиме на порядок меньше при использовании предложенной схемы и наблюдателя с большим коэффициентом усиления в условии помех измерения, нежели при использовании наблюдателя с большим коэффициентом усиления.
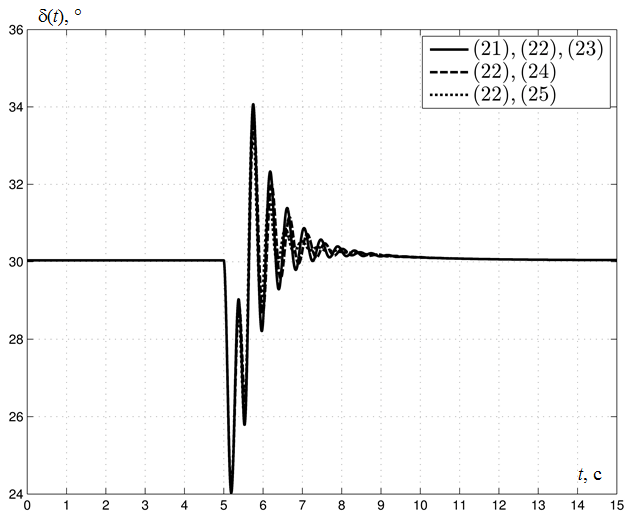
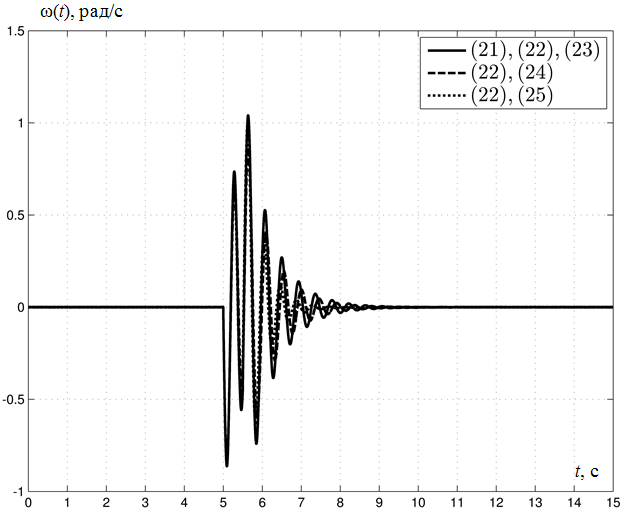
Рис. 1. Переходный процесс по δ(t) Рис. 2. Переходный процесс по ω(t)
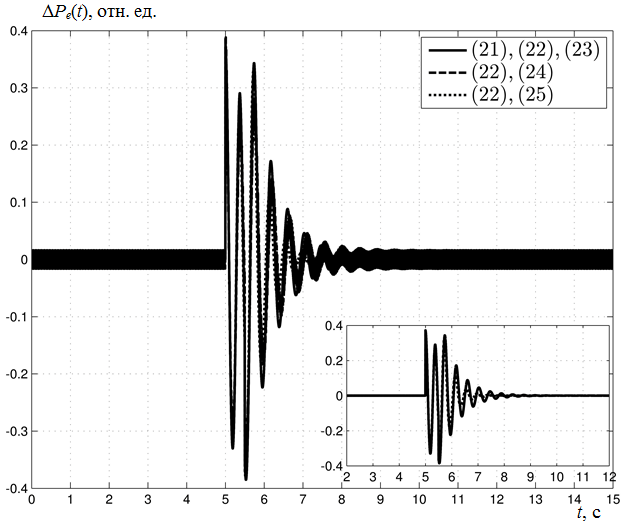
Рис. 3. Переходный процесс по ΔPe(t)
Заключение
На базе модели [4,7,11] предложен алгоритм робастного управления по углу ротора в условиях априорной, параметрической и функциональной неопределенности модели генератора и кратковременных аварийных ситуациях и наличии высокочастотных помех измерения. Для синтеза системы управления используется подход, позволяющий независимо управлять качеством фильтрации помехи и качеством ошибки стабилизации выходной переменной. Приведенный алгоритм прост в реализации, выборе параметров и позволяет компенсировать неопределенности модели генератора с заданной точностью.
Приведены результаты численного моделирования, иллюстрирующие эффективность разработанного алгоритма по сравнению с классическим наблюдателем с большим коэффициентом усиления [8] и наблюдателем с большим коэффициентом усиления в условиях помех измерения [6,12].
Утверждение получено при поддержке гранта РНФ № 14-29-00142 в ИПМаш РАН. Другие работы проводилась при поддержке гранта Президента Российской Федерации (договор W01.16.6325-МД (МД-6325.2016.8)), грантов РФФИ (16-08-00282, 16-08-00686), гранта МОН РФ (проект 14.Z50.31.0031) и гранта Правительства РФ (074-U01).
ЛИТЕРАТУРА
1. , Синтез координирующего робастного управления взаимосвязанными синхронными генераторами // Электричество. 2009. № 9. С. 20–26.
2. Нелинейное адаптивное управление турбогенератором // Изв. РАН. ТиСУ. 2008. № 1. С. 112–119.
3. Фуртат, статический алгоритм управления линейными объектами // Автоматика и телемеханика. 2015. № 3. С. 94-107.
4. Anderson P. M., Fouad A. A. Power system control and stability // Iowa: Iowa State University Press. 1977.
5. Astolfi A., Galaz M., Ortega R. et al. Transient stabilization of multimachine power systems with nontrivial transfer conductance // IEEE Trans. On Automatic Control. 2005. Vol. 50. № 1. P. 60–75.
6. Astolfi D., Marconi L. A high-gain nonlinear observer with limited gain power // IEEE Trans. Automatic Control. 2015. Vol. 60. №. 11. P. 3059-3064.
7. Bergan A. R. Power Systems Analysis // New Jersey: Prentice Hall. 1986.
8. Esfandiari F., Khalil H. K. Output feedback stabilization of fully linearizable systems // International Journal of Control. 1992. Vol.56. №.5. P. 1007-1037.
9. Gauthier J., Hammouri H., Othman S. A simple observer for nonlinear systems application to bioreactors // IEEE Trans. Automat. Contr. 1992. Vol.37. №.6. P. 875-880.
10. Guo Y., Hill D. J., Wang Y. Global transient stability and voltage regulation for power systems // IEEE Trans. on Power Systems. 2001. Vol. 16. № 4. P. 678–688.
11. Pai M. A. Power system stability // N. Y.: North Holland. 1981.
12. Wang L., Astolfi D., Hongye S., Marconi L., Isidori A. Output stabilization for a class of nonlinear systems via high-gain observer with limited gain power // Proc. 1st IFAC Conference on Modelling, Identification and Control of Nonlinear Systems, MICNON 2015, Saint Petersburg, Russia. IFAC-PapersOnLine. Vol. 48. №. 11. P. 730-735.
13. Wang Y.,Xie L., Hill D. J., Middleton R. H. Robust nonlinear controller design for transient stability enhancement of power systems // Proc. of the 31st Conf. on Decision and Control. Arizona. 1992. P. 1117–1122.
I. B.Furtat, A. N.Nekhoroshikh (IPME RAS, ITMO University, St.-Petersburg)
Control of electric generator under high-frequency measurement noises
The problem of robust control of an electric generator with respect to the loading angle under parametric uncertainties, external disturbances and the presence of high-frequency measurement noise is considered. The proposed algorithm allows to reduce the effect of high-frequency noise and also to compensate parametric uncertainties and external disturbances. The numerical simulation results of an electric generator are presented, comparing of some existing algorithms.
Текст доклада согласован с научным руководителем:
(, доцент, д. т.н.,
Университет ИТМО, кафедра Управления Сложными Системами, профессор;
Институт проблем машиноведения РАН, лаборатория Управления Сложными Системами, ведущий научный сотрудник)

