

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Клетки содержащие знак "~" необходимо доопределить, т. е. поставить "1" или "0", выбираем те значение, которые дают наименьшее количество букв в минимизированной функции. Из всех возможных импликантов необходимо выбрать оптимальные с учётом других функций автомата с целью использования одних и тех промежуточных частей схемы для различных букв выходного слова преобразователя. Не склеенные клетки дописываем в выходную функцию.
Запишем выходные функции в минимальной дизъюнктивной нормальной форме (МДНФ):
 ; (3.7)
; (3.7)
 ; (3.8)
; (3.8)
 ; (3.9)
; (3.9)
 . (3.10)
. (3.10)
Представим минимизированные выходные функции Y1, Y2, Y3, Y4 в базисе «И-НЕ».
 (3.11)
(3.11)
 (3.12)
(3.12)
 (3.13)
(3.13)
 (3.14)
(3.14) ![]()
3.4. Преобразователь кода.
Преобразователь кода реализован на инверторах и элементах И-НЕ и ИЛИ - НЕ (К561ЛА7, К561ЛА8, К561ЛА9, К561ЛИ1) и выполняет функции Y1,Y2,Y3,Y4.
Схема преобразователя кода Ф. И.О. приведена на рисунке 3.6.

Рисунок 3.6. – Схема преобразователя кодов
4. ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СХЕМЫ
4.1. Определение частоты кварцевого генератора.
Из диаграммы работы автомата видно, что одному переданному биту информации соответствует один период частоты С. Следует определить какой необходимо выбрать коэффициент деления при определённой частоте кварцевого резонатора.
Из принципиальной схемы видно, что частота
F = C * 24 ;
скорость передачи = С = 100 бит * 21 = 2100 бит за 1 секунду;
F = 2100 * 16 =33600 Гц ;
допустимое отклонение от заданного варианта
Fmax = 2060 * 16 = 32960 Гц,
Fmin = 2140 * 16 =3440 Гц ;
коэффициент деления = Кд = F кварца / F = 1000000 / 33600 = 29,76.
Коэффициент деления может быть только целым числом, поэтому необходимо проверить подходит ли нам число 29 и число 30.
F1 = F кварца / Кд =1000000 / 29 = 34482,8 Гц
F2 = 1000000 / 30 = 33333,3 Гц
Как видно, только частота F2 укладывается в диапазон от Fmin до Fmax, следовательно примем коэффициент деления KД=30. На основании этого рассчитаем частоту импульсов F’ по формуле (4.1):

 (4.1)
(4.1)
Получаем:
Fн=С=2083.33Гц
Выбор схемы задающего генератора зависит от многих факторов:
- стабильность генерируемой частоты;
- форма вырабатываемого сигнала;
- амплитуда сигнала;
- его мощность;
- количество выходных сигналов и их фаза.
Существует множество различных генераторов. Нас интересуют только импульсные генераторы, выполненные на цифровых элементах.
Импульсными генераторами называют устройства, преобразующие энергию источников постоянного напряжения в энергию электрических импульсов. Импульсные генераторы являются устройствами, не преобразующими электрические импульсы, а вырабатывающими их. Для классификации импульсных генераторов можно использовать ряд различных признаков. В зависимости от формы вырабатываемых импульсов можно выделить генераторы прямоугольных импульсов, генераторы линейно изменяющегося напряжения и генераторы специальной формы. В данной главе рассматриваются генераторы прямоугольных импульсов. Генераторы прямоугольных импульсов формируют сигналы, по форме близкие к прямоугольным. Такие генераторы являются релаксационными. Выходной сигнал генераторов имеет участки с резко различающейся скоростью изменения напряжения: участки с очень малой (уровни «0» и «1») и участки с очень большой (переходы напряжения от уровня «0» к уровню «1» и от уровня «1» к уровню «0») скоростью изменения напряжения. Состояния, соответствующие интервалам формирования выходных уровней «0» и «1», называют равновесными. Характер равновесного состояния является одним из критериев классификации генераторов прямоугольных импульсов. Равновесные состояния могут быть длительно устойчивыми и квазиустойчивыми (почти устойчивыми). В длительно устойчивом состоянии устройство может находиться сколь угодно долго. Вывести его из этого состояния равновесия и перевести в другое может только внешнее воздействие, например поданный извне сигнал, называемый запускающим. Квазиустойчивое состояние может существовать только конечное время, определяемое внутренними параметрами и структурой генератора. По истечении указанного времени устройство самостоятельно, без использования каких-либо внешних сигналов, переходит в другое состояние равновесия. В зависимости от характера устойчивых состояний генераторы прямоугольных импульсов делятся на бистабильные, моностабильные и астабильные.
Схема выбранного генератора и делителя частоты приведена на рисунке 4.1
4.2. Делитель частоты
Накопленный к настоящему времени опыт показал, что в устройствах железнодорожной автоматики и телемеханики применение цифровых интегральных микросхем целесообразно не только в узлах цифровой обработки сигналов (разнообразные логические схемы, регистры, шифраторы и т. д.), но и в таких традиционно аналоговых узлах, как генераторы. Использование микросхем при построении автогенераторов позволяет унифицировать технические решения, обеспечивающие высокую стабильность генерируемых частот, создать единообразие конструктивного оформления, снизить номенклатуру комплектующих изделий.
Широко используемая схема простого генератора импульсов приведена на рисунке 5.1. Подстроечный конденсатор С1 нужен для настройки генератора на частоту возбуждения кварца. Примем значение С1=22пФ, С2=33пФ. Результирующее значение ёмкости С=С1+С2=55 пФ. ИМС выполнена по технологии комплементарной логики на КМОП-транзисторах, период следования тактовых импульсов T = 1,8 *RC (T = 1/ Fкварц).
Рассчитаем величину сопротивления:
![]()
![]() (4.2)
(4.2)
Из формулы 4.2 следует, что сопротивление R1=10101Ом. Примем R1=10кОм.
Делитель частоты (рисунок 4.1) собран на двоичных счетчиках К561ИЕ10, которые для увеличения разрядности соединены последовательно. На входы этих микросхем поступают прямоугольные импульсы с кварцевого генератора.
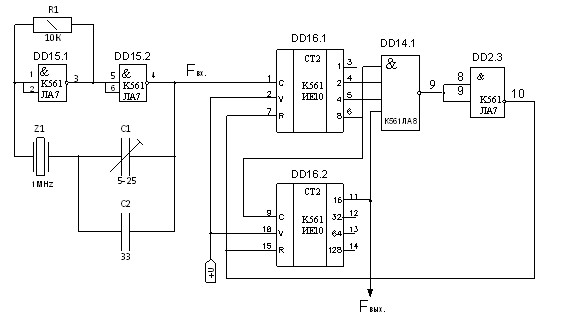 Рисунок 4.1. – Схема задающего генератора и делителя частоты
Рисунок 4.1. – Схема задающего генератора и делителя частоты
4.3. Выбор способа модуляции.
Наиболее помехозащищённой является фазовая модуляция, которая даёт возможность максимально повысить скорость передачи. Основным недостатком ФМ является сложный алгоритм приёма, но при наличии процессора на приёмном конце качество декодирования в основном определяется программным обеспечением, что активно используется в современных компьютерных модемах.
При фазовой модуляции пределе количество единичных и нулевых импульсов должно быть одинаковым, т. е. постоянная составляющая в спектральном разложении сигнала должна быть равна нулю.
Схема модуляции ФМ приведена на схеме управления преобразователем кодов (рисунке 7.1.).
В условиях повышенных помех нужно предусмотреть более гибкий алгоритм ФМ (изменение несущей частоты (C), переменное отношение несущей к входному алфавиту (D) модулятора C/D и их фазы). В данном курсовом проекте эти вопросы не рассматриваем. Модуляцию заменяем манипуляцией со сдвигом фаз на 180.
Схемную реализацию получаем при помощи Булевой функции (4.3):
![]()
![]() (4.3)
(4.3)
5. СОСТАВЛЕНИЕ ВРЕМЕННОЙ ДИАГРАММЫ ФУНКЦИОНИРОВАНИЯ АВТОМАТА.
Составим временную диаграмму функционирования автоматической системы (рисунок 5.1) с целью определения функций и схемного решения других узлов и увязки между собой уже определенных частей передатчика. Временная диаграмма работы автоматической системы строится с учетом выбранной элементной базы. В данной диаграмме (см. рисунок 5.1) показаны сигналы на выводах следующих элементов: – счетчика К561ИЕ16, формирующего управляющие и информационные сигналы С, W1, W2, X1, X2, X3, X4, X5; – регистра К561ИР9, преобразующего параллельный формат данных в последовательный. Выводы регистра: P/S = 1 – запись данных в параллельном формате; P/S = 0 – последовательный вывод данных Q3; Q0 – Q3 – выходы параллельных данных; С – синхронизация сдвига данных; RR = 1 – обнуление регистра при окончании передачи символов сообщения;
Сигнал P/S, подаваемый на соответствующий вход регистра ИР9, формируется в соответствии с функцией:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
