


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
А. В. НЕБЫЛОВ, А. Э. МЕДИНА ПАДРОН
СПБГУАП, Санкт-Петербург
МАНЕВРИРОВАНИЕ МАЛЫМИ КОСМИЧЕСКИМИ АППАРАТАМИ В ИХ ФОРМАЦИИ С ЦЕЛЬЮ ОБЕСПЕЧЕНИЯ НАДЕЖНОЙ СВЯЗИ В ИНТЕГРИРОВАННОЙ СИСТЕМЕ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РОБОТАМИ
Целью работы является анализ возможности поддержания формации малых низкоорбитальных космических аппаратов на орбите Земли, задачей которых является дистанционное управление роботами, выполняющими задачи в труднодоступных районах. В качестве примера могут рассматриваться роботы-геологи, монтажники космических конструкций, медицинские и другие роботы.
Введение
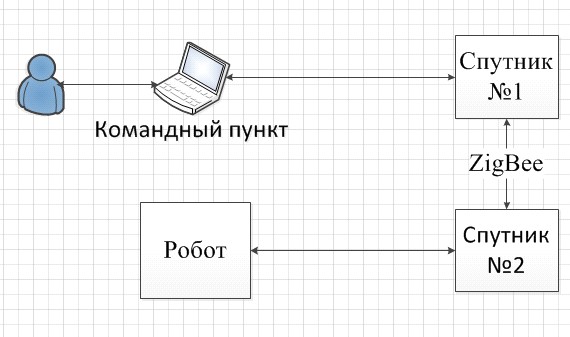
В работе рассматривается задача удаленного управления роботами с помощью группировки малых космических аппаратов (МКА). Актуальность задачи связана с необходимостью проведения различных работ в труднодоступных для человека районах. Примером могут выступать роботы геологи в дальних районах Сибири, роботы монтажники космических конструкций и другие. Командный пункт связывается непосредственно с роботами через МКА, входящие в формацию. При этом роботы могут находиться на большом удалении от командного пункта. Для управления системой из N роботов, требуется формация МКА, состоящая из N+1 спутников. Один спутник поддерживает связь с командным пунктом, остальные - с роботами. Для увеличения времени, доступного для управления, предполагается использовать несколько независимых формаций, которые поочередно будут пролетать над командным пунктом. Спутники в составе одной формации будут поддерживать связь между собой посредством беспроводной передачи данных интерфейса Zigbee. Максимальная дальность надежной связи данного интерфейса обуславливает ограничения, налагаемые на возможную конфигурацию расположения спутников в составе формации. Описываемая система дистанционного управления роботами с использованием формации МКА соответствует концепции международного проекта E-SIT, разрабатываемого в МИПАКТ ГУАП.
Предлагаемый доклад посвящен задаче анализа возможности построения системы дистанционного управления роботами при помощи формации малых космических аппаратов.
Постановка задачи
Для построения описанной выше системы дистанционного управления роботами необходимо обеспечить надежную беспроводную связь между спутниками внутри их формации. Формацией космических аппаратов называется группа, состоящая из нескольких спутников, решающих общие задачи и образующих некоторую геометрическую форму в пространстве, поддерживаемую во времени. При этом космические аппараты внутри формации при необходимости могут совершать маневры, направленные на поддержание геометрической формы, либо на её модификацию. Необходимость поддержания геометрической формы может возникнуть вследствие расхождения аппаратов в пространстве из-за внешних воздействий, действующих на разные аппараты в различной степени. Примером такого воздействия может служить трение остаточных слоев атмосферы, которое зависит помимо формы и размеров спутников также от их ориентации в пространстве, которая может меняться в течение полета.
При этом типичные малопотребляющие решения для обеспечения беспроводной связи между спутниками внутри формации (такие, как ZigBee, Wireless UART и др.) работают на расстояниях, обычно не превышающих единицы сотен метров. Данное ограничение обуславливает необходимость обеспечения возможности для маневрирования спутников внутри формации в случае их расхождения или при выходе из строя одного из спутников, через который осуществлялась связь с другими аппаратами. Из этого следуют две взаимосвязанные задачи, а именно: измерение относительных расстояний между спутниками внутри формации и управление ими.
Определение расстояний между спутниками. Так как задачи, связанные с формациями малых космических аппаратов достаточно новы, на сегодняшний день не существует классических способов определения относительных расстояний между ними. Основными возможными способами измерения относительных расстояний могут быть: спутниковая навигация, оптические системы, лазерные измерители и радиотехнические системы. Лазерные измерители с трудом могут быть применены при работе с малыми космическими аппаратами ввиду малых размеров и сложности добиться попадания луча лазера. Радиотехнические системы сходны по принципу работы со спутниковой навигации и сложнее в исполнении. Оптические системы можно применять различным способом. Самый простой – направить объектив на объект, до которого измеряется расстояние. Получив размер объекта в пикселях, и зная его реальные габариты, можно оценить расстояние до него. Для этого необходимо воспользоваться следующей формулой, которая может быть получена из геометрии (рис.2, слева):
![]()
![]() (1)
(1)
где sizey - реальная длина малого космического аппарата; sizex - реальная ширины малого космического аппарата; pixy - количество пикселей на соответствующей стороне светочувствительной матрицы; size_my - длина соответствующей стороны светочувствительной матрицы; ![]()
![]() – минимальное и максимальное количество пикселей, которые малый космический аппарат занимает на изображении вдоль соответствующей оси;
– минимальное и максимальное количество пикселей, которые малый космический аппарат занимает на изображении вдоль соответствующей оси; ![]()
![]() – расстояние между аппаратами; бf – угол обзора объектива камеры.
– расстояние между аппаратами; бf – угол обзора объектива камеры.
Под соответствующей осью везде понимается ось y на (рис.2, справа), вдоль которой расположена большая сторона малого космического аппарата.
Авторы работы остановились на комплексировании оптических систем с системами спутниковой навигации.
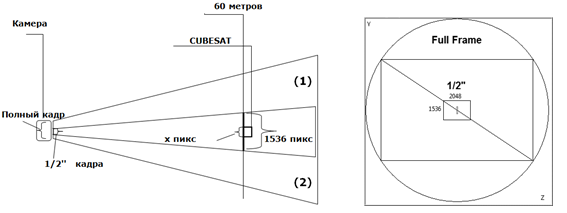
Рис. 2. Методика измерений (слева) и вид в программе (справа)
Моделирование измерения расстояний. Моделирование работы оптического измерителя проводилось в среде LabView для камеры Nanocam C1U. Она имеет 1/2” размер матрицы с соотношением сторон 4:3 (6.77x5.08 мм). Камера имеет разрешение 2048х1536 пикселей и две модификации с различными фокусными расстояниями: 70 мм или 35 мм.
При этом исследовалась формация, вид которой представлен на рис.3, слева, состоящая из 4 аппаратов типа CubeSat 6U с габаритами 60х10х10 см. Конусами показаны области обзора двух камер. На рис.3, справа, сверху и снизу представлены изображения, проецируемые на линзы верхней и нижней камер соответственно. Большой и малый прямоугольники показывают размеры светочувствительных матриц, типа full frame и 1/2' соответственно. Например, на нижнем изображении видно, что два спутника попадают в поле обзора линзы, но не на светочувствительную матрицу (два маленьких прямоугольника снизу и сверху изображения).
Методика измерений, описанная в данной работе, соответствует обработке изображения, представленного ни рис.3, справа, сверху (что соответствует малому конусу на рис.3, слева).
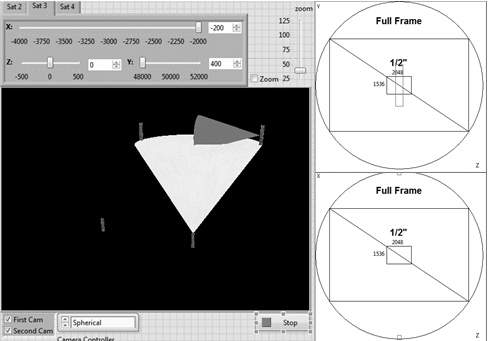
Рис. 3. Интерфейс программы
Тот факт, что расстояние между аппаратами изменяется непрерывно, а количество пикселей на изображении – дискретно, обуславливает методическую ошибку измерения. Её величина приведена на рис.4. К методической ошибке будут прибавляться ошибки измерителей, ошибки в обработке изображений и другие. Более подробное исследование ошибок измерений будет проведено после завершения работ по сборке испытательного стенда, которые сейчас ведутся авторами.
Вторым источником информации о расстоянии между аппаратами может служить GPS приемник. Ввиду большой скорости и высоты орбиты полета формации, на аппаратах входящих в её состав не рекомендуется использовать стандартный спутниковые приемники. Поэтому должны использоваться приемники, предоставляющие информацию о фазовых измерениях, что даст возможность измерения не абсолютных координат каждого аппарата в отдельности, а их относительных координат.
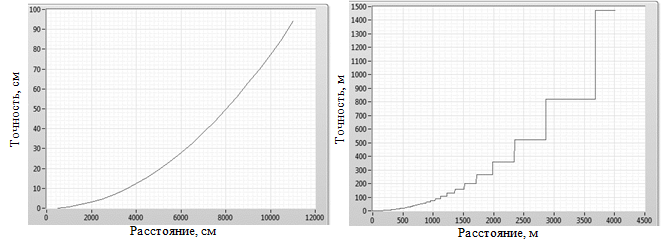
Рис. 4. Методическая ошибка измерений оптической системы
Управление спутниками. Аппаратные средства, позволяющие осуществлять управление космическими аппаратами, приведены в [2,3]. В данной работе рассмотрены только математические основы управления относительным положением малых космических аппаратов внутри формации. Для решения данной задачи принято использовать систему дифференциальных уравнений Хилла, вид которых приведен ниже [1].
![]()
![]() ;
; ![]()
![]() ;
; ![]()
![]() (1)
(1)
где x, y,z – относительные координаты, ![]()
![]() – угловая скорость вращения спутника вокруг Земли, r0 – радиус орбиты, µ – гравитационный параметр.
– угловая скорость вращения спутника вокруг Земли, r0 – радиус орбиты, µ – гравитационный параметр.
При этом условием сходимости орбит является выполнение следующего равенства:
![]()
![]() (2)
(2)
Моделирование управления. Моделирование проводилось в среде программирования LabView. Задача моделирования ставилась следующая: используя уравнения движения, приведенные ранее, и учитывая управляющее воздействие на спутники, изменить расстояние между ними таким образом, чтобы оно не превышало 100 метров. Начальные траектории брались произвольные, максимальное воздействие на спутник не превышает 0.4 Н, тип управления – релейный. Предполагается, что один из спутников является главным, а другой подстраивает свою траекторию под первый. С учетом воздействий, уравнения (1) будут выглядеть следующим образом:
![]()
![]() ;
; ![]()
![]() ;
; ![]()
![]() (3)
(3)
где ![]()
![]() – управляющие воздействия по соответствующим осям.
– управляющие воздействия по соответствующим осям.
При этом стоит обратить внимание на тот факт, что ошибки ориентации аппарата и осей приложения воздействий будут приводить к изменению всех проекций скоростей, а не только требуемых. Это может вызвать нарушение условия (2), и тем самым, расхождение орбит аппаратов. Поэтому, для облегчения задачи управления, на борту аппаратов необходимо иметь несколько аппаратных средств, создающих тягу, оси которых располагаются вдоль разных осей. В идеальном случае таких аппаратных средств должно быть 6: по два на каждую ось. Однако, ввиду финансовых, энергетических и массо-габаритных ограничений, данный вопрос пока окончательно не решен.
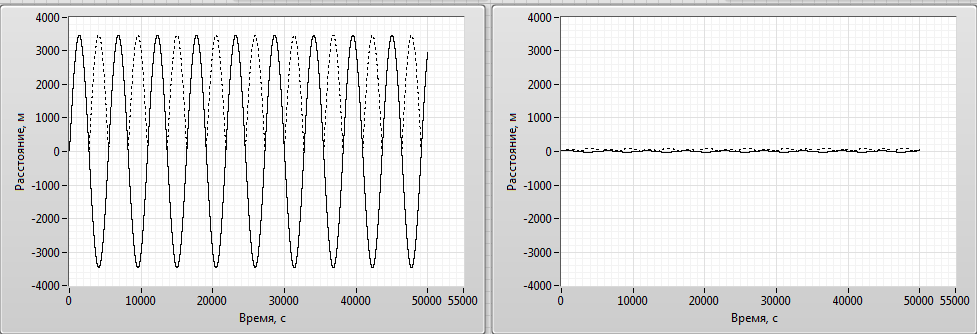
Рис. 5. Расстояние между аппаратами без управления и с ним.
Заключение. В работе рассмотрена возможность построения системы дистанционного управления роботами при помощи формации малых космических аппаратов. Основными задачами, стоящими перед авторами на данный момент являются создание стенда для определения точности измерений расстояния между спутниками оптической системой и разработка алгоритма управления малыми космическими аппаратами.
Работа выполнена при господдержке по НИР-С-11.
Литература
, Исследование алгоритмов управления движением группы спутников с помощью аэродинамической силы сопротивления. // Препринты ИПМ им. . 2015. № 28. 30 с. Kvell U., Puusepp M., Kaminski F., Nanosatellite orbit control using MEMS cold gas thrusters. Proceedings of the Estonian Academy of Sciences. 2014. № 63. P. 279–285. Wu K., Ouattara I.,Quinsac G., Dynamic control of a CubeSat Attitude and Orbit Control System (AOCS) with propulsion for Deep-Space missions. The 7th Nano–Satellite Symposium and The 4th Unisec–Global Meeting. 2016.
A. V.Nebylov, A. E.Medina Padron , SUAI, Saint-Petersburg
Maneuvering Small Satellites In Their Formation With The Purpose Of Providing Reliable Communication In The Integrated Remote Control System Of Robots
The task of the work is to analyze the capability of the formation of the spacecrafts to ensure the control of the remote robots performing tasks in hard-to-reach areas. As an example, robots-geologists, assemblers of space structures, medical and other robots can be considered.
«Текст расширенного реферата доклада согласован с научным руководителем».
П. с. есть вариант с подписью научного руководителя в формате pdf, но в систему «СПОК-ЭЛЕКТРОПРИБОР» загрузить её не могу ввиду ошибки «413 request entity too large» (вес 39 МБ)
Научный руководитель д. т.н, проф, .
