

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лабораторная работа № 2
«Исследование измерителей параметров пространственного движения
центра масс летательного аппарата»
по дисциплине «Бортовые системы управления»
3-й курс семестр 6
Цель работы:
Ознакомление со структурой и принципом действия акселерометров. Изучение принципов построения математических моделей акселерометров. Получение статической характеристики акселерометра. Изучение метода наименьших квадратов для обработки экспериментальных данных. Изучение методов численного интегрирования непрерывных функций.Время выполнения работы: 4 часа.
Методические материалы:
Оборудование систем управления летательных аппаратов [Текст] / . – Харьков: Харьк. авиац. ин-т, 1983. – 95 с. Ануфриев, И. Е. MATLAB 7 [Текст] / , , . – СПб.: БХВ-Петербург, 2005. – 1104 с. Buckwalter, Len. Avionics Training: Systems, Installation and Troubleshooting [Text] / Len Buckwalter. – Lecsburg: Avionics Communications Inc., 2010. – 278 p.Теоретическое введение:
Датчики, предназначенные для измерения линейных и угловых ускорений летательных аппаратов, называются акселерометрами. Акселерометры измеряют так называемое «кажущееся» ускорение в проекциях на определенные направления. К акселерометрам относятся и устройства для измерения проекций кажущейся скорости летательного аппарата. Кажущаяся скорость – это интеграл от кажущегося ускорения, поэтому такие акселерометры называются интегрирующими.
По типу чувствительного элемента, используемого в акселерометрах, датчики делятся на гироскопические и негироскопические.
Элементом, непосредственно воспринимающим ускорение, является сейсмическая масса. У акселерометров негироскопического типа сейсмическая масса выполняется в виде твердого тела. У акселерометров гироскопического типа сейсмической массой служит сам гироскоп.
Для самолетных систем в основном применяются акселерометры с чувствительным элементом, выполненным в виде твердого тела.
Акселерометры как датчики линейных ускорений нашли широкое применение в пилотажно-навигационных системах самолетов. При помощи таких акселерометров решаются следующие задачи:
- формирование сигналов обратной связи в системах автоматического управления траекторией полета; выдача сигналов предупреждения при достижении самолетом предельно допустимой перегрузки; выдача сигналов отключения коррекции гировертикалей при достижении самолетом заданного ускорения; выдача сигналов в инерциальную навигационную систему.
По характеру движения сейсмической массы различают акселерометры с поступательным и угловым ее перемещением. Акселерометры линейных ускорений с угловым перемещением сейсмической массы называются маятниковыми.
Соединение звеньев, входящих в структуру акселерометра, могут образовывать либо разомкнутую, либо замкнутую структуру.
По количеству измеряемых одним акселерометром составляющих ускорения акселерометры делятся на:
- однокомпонентные (одноосевые); двухкомпонентные (двухосевые); трехкомпонентные (трехосевые).
Однокомпонентные акселерометры имеют одну ось чувствительности. Такие акселерометры измеряют одну составляющую линейного ускорения. Двухкомпонентные и трехкомпонентные соответственно имеют две и три оси чувствительности. Такие датчики соответственно измеряют две и три составляющие линейного ускорения.
Устройство и принцип действия датчика линейных ускорений рассмотрим на примере однокомпонентного акселерометра с пружинным подвесом чувствительного элемента (сейсмической массы). Структурная схема акселерометра приведена на рис. 7.9.
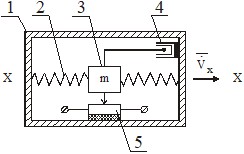
Рисунок 2.1 – Структурная схема акселерометра линейных ускорений
1 – корпус; 3 –чувствительный элемент – сейсмическая масса; | 2 – пружины подвеса; 4 – воздушный демпфер; 5 – потенциометрический преобразователь |
Как видно из рис. 1.2, чувствительный элемент 3 подвешен в корпусе прибора 1 при помощи пружин 2. Для демпфирования собственных колебаний чувствительного элемента используется воздушный демпфер 4. Выходной сигнал, пропорциональный измеренному ускорению, снимается с потенциометрического преобразоваОсью чувствительности акселерометра является ось OX. На летательном аппарате ось чувствительности устанавливается параллельно той оси ЛА, относительно которой необходимо измерять ускорение.
Методы численного интегрирования
Задача численного интегрирования ставится так. Задан массив значений xi функции x(t), измеренных при значениях ti аргумента, заданных другим массивом. Нужно вычислить интеграл от x(t) в этом диапазоне. Очевидно, эту задачу можно решить только при условии проведения через заданные точки непрерывной кривой. Только в этом случае задача поиска интеграла становится определенной.
Большинство численных методов интегрирования функции опираются на идею замены подынтегральной функции x(t) некоторой приближающей её функцией Х(t), интеграл от которой вычисляется достаточно легко. Приближение обычно осуществляется интерполированием в пределах заданного диапазона изменения аргумента. Будем считать, что функция x(t) задана массивом своих значений xi в n равноудаленных точках диапазона изменения аргумента t от a до b так, что h = (b – a) / (n – 1) есть шагом задания функции (одновременно это является шагом интегрирования). На рис. 2.3 приведено графическое представление такой функции.
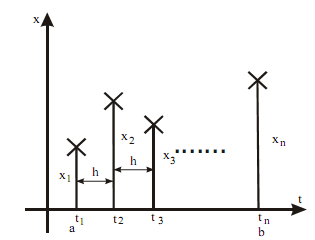
Рисунок 2.2 – Графическое представление табличной функции
Метод правых прямоугольников
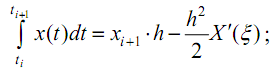
Этот самый простой метод численного интегрирования основан на том, что на каждом шаге ![]() интегрирования функция x(t) изменяется на постоянную величину, равную значению xi на левом конце соответствующего интервала. В связи с этим интеграл от функции x(t) на этом интервале можно геометрически представить как площадь прямоугольника (рис. 2.3), который справа примыкает к заданной кривой и вычислить по формуле:
интегрирования функция x(t) изменяется на постоянную величину, равную значению xi на левом конце соответствующего интервала. В связи с этим интеграл от функции x(t) на этом интервале можно геометрически представить как площадь прямоугольника (рис. 2.3), который справа примыкает к заданной кривой и вычислить по формуле:
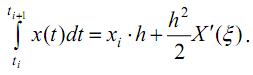 (2.1)
(2.1)
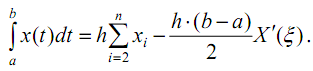
Второй член формулы представляет оценку ошибки метода интегрирования (о – некоторое значение аргумента в середине интервала). Суммируя результаты интегрирования по отдельным шагам, получим общую формулу:
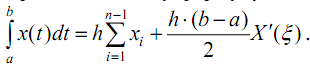 (2.2)
(2.2)
Т. е. для определения полного интеграла при помощи метода правых прямоугольников достаточно просуммировать все заданные значения функции, кроме последнего, и результат умножить на шаг интегрирования. Уменьшая величину шага интегрирования, можно существенно уменьшить ошибку определения интеграла.
Метод левых прямоугольников
Сущность этого метода аналогична, за исключением того, что аппроксимирующие прямоугольники теперь примыкают слева (рис. 2.4) к заданным точкам. Соответствующие формулы численного интегрирования принимают вид:
 (2.3)
(2.3)
 (2.4)
(2.4)
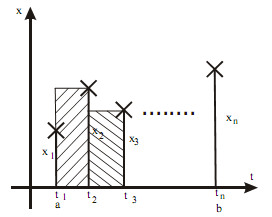
Рисунок 2.3 – Метод правых прямоугольников
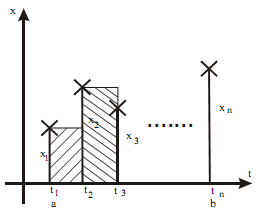
Рисунок 2.4 – Метод левых прямоугольников
Метод трапеций
Формулы этого метода:
![]() (2.5)
(2.5)
 (2.6)
(2.6)
Графическая интерполяция: при интегрировании этим методом вычисляются площади (рис. 2.5) трапеций, которые образуются, если соединить отдельные заданные точки отрезками прямых, т. е. при линейной интерполяции.
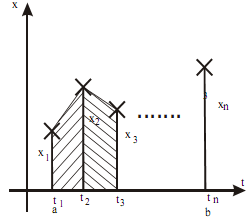
Рисунок 2.5 – Метод трапеций
Метод Симпсона
Поделим интервал интегрирования [a; b] на четное количество k равных частей так, чтобы общее количество точек n = 2k – 1 было нечетным, а шаг интегрирования будет равен h = (b – a) / (n – 1) = (b – a) / 2(k – 1).
На каждом из интервалов ![]() (i = 1, 3, 5, … n–2) интерполируем заданные точки квадратной параболой:
(i = 1, 3, 5, … n–2) интерполируем заданные точки квадратной параболой:
![]() (2.7)
(2.7)
Интегрируя эту функцию в интервале ![]() , получим формулу Симпсона для отдельного участка:
, получим формулу Симпсона для отдельного участка:
 (2.8)
(2.8)
Суммируя этот результат по всем отрезкам, придем к квадратурной формуле Симпсона:
 (2.9)
(2.9)
Показатель степени в зависимости ошибки от шага интегрирования принято называть порядком метода интегрирования.
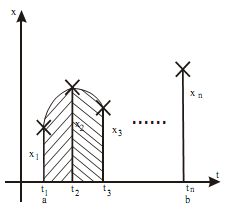
Рисунок 2.6 – Метод Симпсона
В системе MATLAB существуют три встроенные функции, которые осуществляют численное интегрирование функций – trapz, quad и quad8.
Процедура trapz осуществляет вычисление площади под графиком функции y(x) в случае, когда функция представлена в виде двух массивов: x – значения аргумента в возрастающем порядке, y – соответствующие значения функции при этих значениях аргумента.
>> I = trapz(x, y)
Функция quad использует квадратурные формулы Ньютона-Котеса. Функция quad8 использует более точные формулы 8-го порядка.
Алгоритм оценки результатов измерения согласно метода наименьших квадратов
Метод наименьших квадратов применяется для получения оценок обработки накопленных измерений. В том случае, если выполнено ![]() измерений координат
измерений координат ![]() (параметров) системы
(параметров) системы
| (2.10) |
то поскольку компоненты вектора наблюдения
| (2.11) |
измеряются с ошибками, то как следствие измерений получают новый вектор, то есть вектор измерений
| (2.12) |
В выражениях (2.10) … (2.12) обозначены:
![]() - n-мерный вектор состояния системы;
- n-мерный вектор состояния системы;
![]() - квадратичная матрица коэффициентов системы размеренности n n;
- квадратичная матрица коэффициентов системы размеренности n n;
![]() - матрица возмущений, размеренности m k;
- матрица возмущений, размеренности m k;
![]() - k-мерный вектор возмущений, действующих на входе динамической системы;
- k-мерный вектор возмущений, действующих на входе динамической системы;
![]() - матрица связи (наблюдений);
- матрица связи (наблюдений);
![]() - вектор измерений.
- вектор измерений.
Таким образом, согласно вектору измерений ![]() и заданной матрице наблюдения
и заданной матрице наблюдения ![]() наилучшим образом оценить состояние вектора
наилучшим образом оценить состояние вектора ![]() . Критерием такой оценки согласно метода наименьших квадратов служит функционал:
. Критерием такой оценки согласно метода наименьших квадратов служит функционал:
| (2.13) |
 ,
,который минимизирует сумму квадратов ошибок измерения ![]() .
.
В матричном виде критерий (2.13) имеет вид:
| (2.14) |
или, учитывая, что ![]() запишется так
запишется так
| (2.15) |
Оценка вектора состояния ![]() системы
системы ![]() можно получить путем решения уравнения
можно получить путем решения уравнения
| (2.16) |
применяя которое к (2.15), получим:
| (2.17) |
Выражение (2.17) принимает значение, равное нулю в том случае, когда согласные равны нулю:
| (2.18) |
Из выражения
| (2.19) |
следует
|
откуда
| (2.20) |
Теперь сформируем необходимые и достаточные условия получения оптимальных оценок ![]() вектора состояния системы
вектора состояния системы ![]() методом наименьших квадратов, который предусматривает:
методом наименьших квадратов, который предусматривает:
- наличие накопления наблюдений
Структурная схема получения оптимальных оценок методом наименьших квадратов может быть представлена в виде рис. 2.7.
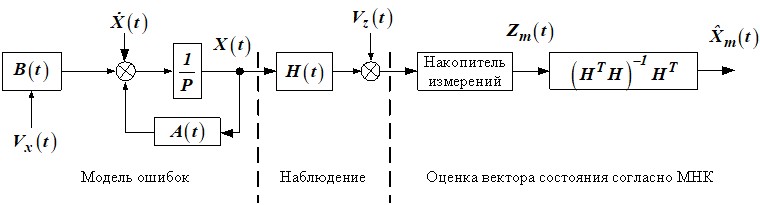
Рисунок 2.7 – Структурная схема получения оптимальных оценок
Получение оценки ![]() связано с накоплением наблюдений
связано с накоплением наблюдений ![]() , вследствие чего новая оценка параметра не совпадает по времени с его текущим значением из-за необходимости времени не накопление наблюдений. Поэтому алгоритм МНК для оценки
, вследствие чего новая оценка параметра не совпадает по времени с его текущим значением из-за необходимости времени не накопление наблюдений. Поэтому алгоритм МНК для оценки ![]() используют в случае измерения одного и того же параметра несколькими датчиками.
используют в случае измерения одного и того же параметра несколькими датчиками.
Пример. Рассмотрим систему измерения углового положения ЛА с использованием МНК. В данной системе на основе информации от трех идентичных ИНС вычисляется угол крена ЛА. Показания первой, второй и третей ИНС соответственно равны:
| (2.21) |

где ![]() - текущее значение угла крена;
- текущее значение угла крена;
![]() ,
, ![]() ,
, ![]() - ошибки ИНС (компоненты вектора
- ошибки ИНС (компоненты вектора ![]() ).
).
В матричной форме (2.21) имеет вид
| (2.22) |
где ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Итак, необходимо в соответствии с наблюдением ![]() и заданною матрицею наблюдения
и заданною матрицею наблюдения ![]() осуществить оценку состояния вектора
осуществить оценку состояния вектора ![]() .
.
Оценкой угла крена согласно МНК является:
| (2.23) |
где а)  ;
;
б) ![]() ;
;
в) ![]()
![]() =
= .
.
Полученные значения подставим в (2.23):
|
 .
.Таким образом, в данном случае значение крена определяется как среднее арифметическое показаний трех инерциальных систем.
Порядок выполнения работы:
Изменяя угол ориентации оси чувствительности акселерометра при помощи поворотного стенда, получить статическую характеристику прибора. W = g * cosб, где б – угол между осью чувствительности акселерометра и направлением действия вектора ускорения свободного падения. Опыт повторить 5 раз и обработать результаты измерений, используя метод наименьших квадратов. Изобразить полученную статическую характеристику акселерометра. Выполнить подключение к персональному компьютеру-серверу и принять данные об ускорении БПЛА. На основании полученной статической характеристики акселерометра и данным о полете модели получить угловые эволюции летательного аппарата. Изобразить угловые отклонения БПЛА в виде графиков как функции времени. Используя один из методов численного интегрирования, получить проекции векторов скорости и положения БПЛА на оси связанной с объектом системы координат. Полученные результаты изобразить в виде графиков. Получить матрицу перехода из связанной в стартовую систему координат. Найти проекции вектора ускорения БПЛА на оси стартовой системы координат.
Индивидуальное задание
Решить задачу согласно варианту задания.
Известно, что летательный аппарат движется с ускорением w, которое действует вдоль оси ОХ связанной системы координат. Кроме этого, на него действует гравитационное ускорение g. Движение летательного аппарата происходит в течении 60,4 с, данные от измерительного блока поступают каждые 0,1 с. Измерительный блок включает в себя три акселерометра, оси чувствительности которых расположены вдоль осей связанной с летательным аппаратом системы координат. Взаимное расположение систем координат приведено на рис. 2.8.
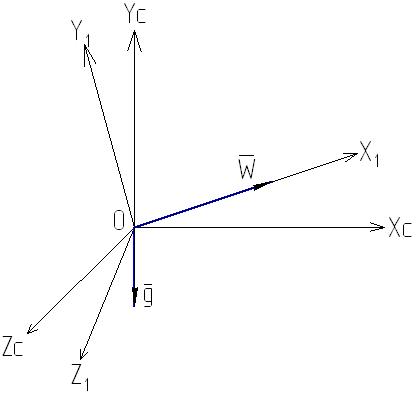
Рисунок 2.8 – Взаимное расположение связанной и стартовой
систем координат
В файле с исходными данными “Lr2_VarN. mat” (N – номер варианта) содержатся результаты измерения полного ускорения в связанной с летательным аппаратом системе координат (проекции wx, wy, wz), величина ускорения w относительно оси ОХ связанной с летательным аппаратом системы координат, углы ориентации связанной системы координат относительно стартовой (roll – угол крена, yaw – угол рыскания, pitch – угол тангажа) как функции времени t.
В момент времени t1 один из акселерометров перестал работать правильно. Определить, в какой момент времени это произошло и какой из трех датчиков отказал (wx, wy или wz).
Дать письменные ответы на вопросы:
- Для каких целей применяется на ЛА акселерометр линейных ускорений? Что измеряет акселерометр линейных ускорений? Что такое перегрузка? В чем состоит разница между абсолютным и кажущимся ускорением? Что является чувствительным элементом акселерометра?
Термины для занесения в тезаурус
Поперечное управление самолета – управление по параметрам, определяющим движение самолета в горизонтальной плоскости XC OC ZC: боковой координате центра масс, угла рыскания и пути, а также угла крена.
Продольное управление самолетом – управление по параметрам, определяющим движение самолета в вертикальной плоскости XC OC YC: продольной и вертикальной (высота) координатам центра масс, угла тангажа, наклона траектории к атаке.
Пропульсивная сила – сила, приводящая в движение самолет (аэродинамическая или реактивная).
Штопор – крутое снижение самолета по винтовой траектории с одновременным вращением вокруг своей продольной оси по причине авторотации крыла на больших углах атаки.
