
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК. 621.01
Г. Уалиев,
Динамическая модель механизмов независимого движения
Казахстан, Алматы, Казахский Национальный педагогический университет имени Абая
Б?л ма?алада механикалы? ж?йендер серпімді звенолы механизмдер динамикасын моделдеу ?уісі ?арастырыл?ан. Иінді механикасы? сызы?сыз функциясы бойынша дифференциалды те?деулеры алын?ан.
В данной работе рассмотрены вопросы построения динамических моделей многомассовых передаточных механизмов с существенно (конечные упругие перемещения) упругими звеньями. Приводятся модели цепных передаточных систем с закрепленными и свободными концами.
In this paper the questions of the building of the dynamic models of multimass mechanisms with essential (finite elastic movements) elastic links are considered. The models of the chain transfer systems with fixed and free ends are presented.
Ключевые слова: динамическая модель, механизм, упругие звенья, многомассовые системы.
Изучение и анализ механических движений и физико-технологических процессов связаны с составлением их математических моделей, т. е. систем дифференциальных, интегральных или интегро-дифференциальных уравнений, с помощью которых осуществляется математическое описание движения рассматриваемой механической системы. В ряде случаев возникает необходимость принятия некоторых допущений для компенсации недостатков информации или выбор целенаправленного приближенного математического описания процесса для его дальнейшего анализа. Будем предполагать, что ротор двигателя может рассматриваться как вращающееся твердое тело, а входные звенья всех инерционных элементов
связаны с ротором механизмами с линейными функциями положения. Пусть ![]() – передаточное отношение, связывающее ротор с входным звеном s-гo инерционного элемента. Обобщенной координатой s-го инерционного элемента, приведенной к ротору, будет называться величина
– передаточное отношение, связывающее ротор с входным звеном s-гo инерционного элемента. Обобщенной координатой s-го инерционного элемента, приведенной к ротору, будет называться величина
![]() (1)
(1)
где ![]() – абсолютнаякоордината.
– абсолютнаякоордината.
Определим выражение для кинетической энергии системы. Пусть ![]() – момент инерции s-гo инерционного элемента, приведенный к его входному звену, который может быть постоянным или являться функцией координаты
– момент инерции s-гo инерционного элемента, приведенный к его входному звену, который может быть постоянным или являться функцией координаты ![]() .
.
 (2)
(2)
где n – число инерционных элементов в механической системе, не считая ротора двигателя. Перейдем в (2) к приведенным координатам (1):
 (3)
(3)
где ![]() – момент инерции s-го элемента, приведенный к оси ротора.
– момент инерции s-го элемента, приведенный к оси ротора.
Для определения s-й обобщенной силы следует s-й обобщенной координате ![]() дать приращение
дать приращение ![]() и определить работу активных сил на этом перемещении. Обобщенная сила определяется как отношение этой работы к
и определить работу активных сил на этом перемещении. Обобщенная сила определяется как отношение этой работы к ![]() [1].
[1].
Рисунок 1. Приведенная модель системы с закрепленным концом
Рассмотрим силы, действующие на s-й инерционный элемент (рис.1). В общем случае это – механизм с жесткими звеньями, в соответствии с введенными обозначениями qs – угол поворота его входного звена. Силы сопротивления, приложенные к звеньям этого механизма, могут быть сведены к обобщенной силе сопротивления – приведенному моменту ![]() . Следуя принятым допущениям, будем полагать, что он является функцией от
. Следуя принятым допущениям, будем полагать, что он является функцией от ![]() ,
, ![]() . Входное звено s-гo инерционного элемента связано упругим элементом с выходным звеном s – 1-го инерционного элемента. В соответствии со сделанными выше предположениями угол поворота выходного звена s – 1-го элемента может быть получен делением угла поворота qS-1 его входного звена на передаточное отношение s – 1-го механизма, равное
. Входное звено s-гo инерционного элемента связано упругим элементом с выходным звеном s – 1-го инерционного элемента. В соответствии со сделанными выше предположениями угол поворота выходного звена s – 1-го элемента может быть получен делением угла поворота qS-1 его входного звена на передаточное отношение s – 1-го механизма, равное ![]() . Деформация упругого элемента, соединяющего s-й и s-1 – й инерционные элементы, определяется
. Деформация упругого элемента, соединяющего s-й и s-1 – й инерционные элементы, определяется
![]() . (4)
. (4)
Моменты упругих и диссипативных сил, возникающих в этом элементе, определяем по формуле:
 (5)
(5)
Момент в упругом элементе, соединяющем s-й и s +1-й элементы находим из выражения
 (6)
(6)
Изменению приведенного угла поворота на ![]() соответствует поворот входного звена s-гo инерционного элемента на
соответствует поворот входного звена s-гo инерционного элемента на ![]() , а выходного звена –
, а выходного звена – ![]() . Тогда работа всех сил на взаимном перемещении
. Тогда работа всех сил на взаимном перемещении ![]() будет
будет
![]() .
.
Обобщенная сила определяется из следующего выражения
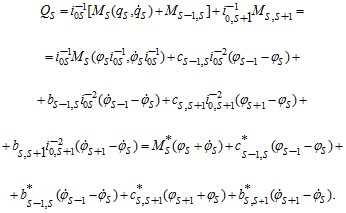 (7)
(7)
где ![]() (8)
(8)
При s = 0 в (8) вместо ![]() следует подставлять движущий момент М0, зависимость которого от параметров движения определяется характеристикой двигателя.
следует подставлять движущий момент М0, зависимость которого от параметров движения определяется характеристикой двигателя.
Параметры
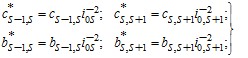 (9)
(9)
представляют собой приведенные к ротору коэффициенты жесткости и коэффициенты сопротивления.
Составим уравнение движения системы в форме уравнений Лагранжа второго рода
![]() (10)
(10)
Подставляя в (10) выражения (3) и (7), получаем:
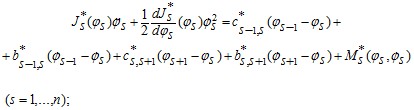 (11)
(11)
![]() (12)
(12)
В последнем уравнении учтено, что при роторном двигателе ![]() .
.
Присоединив к уравнениям (11) и (12) характеристику двигателя, получим систему уравнений движения упругой машины. Выбрав характеристику двигателя в виде [2], имеем
![]() (13)
(13)
где ![]() постоянная времени двигателя.
постоянная времени двигателя.
Приведем уравнение движения к форме, удобной для применения метода возмущений [3]. Переменные моменты инерции представим в следующем виде:
 , (14)
, (14)
где ![]() – периодическая функция
– периодическая функция ![]() с периодом
с периодом ![]() , что соответствует периоду
, что соответствует периоду ![]() функции
функции ![]() . Моменты сил имеют следующий вид:
. Моменты сил имеют следующий вид:
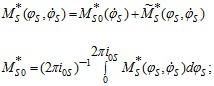 (15)
(15)
 (16)
(16)
С учетом (14) - (16) перепишем уравнения (11) - (13) таким образом:
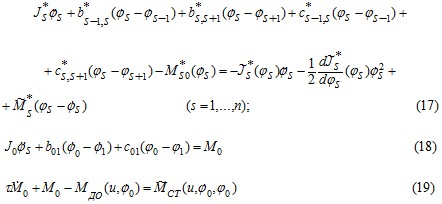
Уравнения (17), (18) и (19) описывают движение многомассовой механической системы с упругими звеньями[4].
Список литературы
1. Основной курс теоретической механики. - Т.1,2. М.: -1967. -468с.
2. Колебания машин с механизмами циклового действия. – Л.: – 1990. -240с.
3. Лекции по аналитической механике. – М.: -1960. -296с.
4. Математическое моделирование динамики механических систем нелинейными характеристиками, Алматы, 2007 г.,-332 с.
Сведения об авторах
УалиевГахип
РГП НА ПХВ "Казахский Национальный педагогический университет имени Абая МОН РК",КазНПУ им. Абая, Алматы, Казахстан, д. т.н., профессор, моб. тел. +7777265412.
УалиевЗаир Гахипович
РГП НА ПХВ "Казахский Национальный педагогический университет имени Абая МОНРК",КазНПУ им. Абая, Алматы, Казахстан, д.т. н., профессор, тел. +7(727)2726909, e-mail: z. *****@***ru
