


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лекция 16.
9 Синтез линейных непрерывных систем автоматического управления
9.1 Постановка задачи синтеза САУ
9.1.1 Определение понятия синтеза САУ
Все математические задачи, решаемые в теории автоматического управления, можно объединить в два больших класса:
- задачи анализа систем управления; задачи синтеза систем управления.
В задачах анализа известна структура системы, заданы все параметры системы, и требуется оценить ее статические или динамические свойства. К задачам анализа относятся определение устойчивости (см. лекции №13-15) и оценка качества управления (см. лекции №11-12) системы.
Задачи синтеза можно рассматривать как обратные задачам анализа: в них требуется выбрать принцип управления, определить структуру и рассчитать параметры системы по заданным показателям качества управления. Простейшими задачами синтеза являются, например, задачи определения передаточного коэффициента разомкнутой САУ по заданной ошибке или условию минимума интегральной оценки.
Синтез САУ – процедура определения структуры и параметров системы по заданным показателям качества управления. Как любая обратная задача, задача синтеза в отличие от задачи анализа имеет множество решений для одних и тех же заданных условий.
Синтез является важнейшим этапом проектирования систем, основным и наиболее важным приложением результатов, полученных теорией автоматического управления, которая сегодня позволяет создать систему управления практически для любого объекта. Однако спроектировать высококачественную систему управления этим объектом можно лишь при наличии достаточно точной математической модели. Причем, согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления. Поэтому, иногда, дешевле правильно спроектировать объект управления, чем создавать для него индивидуальную систему управления. Последнее замечание не покажется неосуществимым (принято считать, что объект управления задан), если учесть наличие определенной свободы у проектировщика систем управления в части выбора типа датчика и места его установки, мощности исполнительного механизма и т. п.
9.1.2 Требования к промышленным системам управления (критериальная стратегия синтеза)
Исходными данными для синтеза САУ являются: математическое описание объекта управления (часто в виде передаточной функции), характеристики возмущающих сигналов и показатели качества управления (необходимый запас устойчивости, статическая и динамическая точность). Первые два требования являются свойствами управляемого процесса, а последнее требование определяется технологическими задачами, которые решаются этим процессом. Как правило, к промышленным системам управления предъявляются следующие требования:
система должна обеспечивать устойчивое управление процессом во всем диапазоне нагрузок на технологический агрегат; система должна обеспечивать в окрестности рабочей точки заданное качество переходных процессов управления (время переходного процесса, перерегулирование, колебательность и т. п.); система должна обеспечивать в установившемся режиме заданную статическую точность регулирования.Чем выше требования к качеству управления, тем более сложной и дорогой будет система. Поэтому при создании САУ стремятся найти разумный компромисс между качеством регулирования и затратами на создание системы.
9.1.3 Методологические основы синтеза
Решение задачи синтеза при проектировании системы, в общем случае, состоит в необходимости определения алгоритмической и функциональной структуры системы.
Определение алгоритмической структуры (теоретический синтез) производится с использованием математических методов и на основе требований, сформулированных в четкой математической форме (т. е. выбранной критериальной стратегии).
Определение функциональной структуры (технический синтез) заключается в выборе конкретных физических элементов и согласовании их между собой по статическим и энергетическим характеристикам. Эта процедура не имеет пока строгой математической основы (т. е. не формализована) и поэтому относится к области инженерного творчества.
Так как не всякий элемент полученной в результате расчета алгоритмической структуры может иметь отображение в виде физического блока функциональной структуры (не может быть физически реализован), задачу синтеза в большинстве случаев невозможно решить, определяя сначала алгоритмическую структуру САУ, а затем по ней – функциональную структуру. Поэтому задачу синтеза в большинстве случаев решают следующим образом.
Сначала, исходя из характеристик объекта управления, требований к назначению и условиям работы САУ, по каталогам серийного оборудования выбирают функционально необходимые элементы системы, такие как:
- регулирующий орган; исполнительное устройство; датчики.
Все эти элементы САУ совместно с объектом управления образуют неизменяемую часть функциональной структуры системы (рис. 9.1).
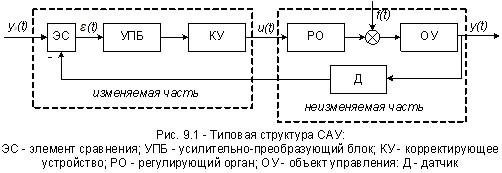
Затем, на основании требований к статическим и динамическим свойствам САУ решают задачу определения алгоритмической структуры изменяемой части функциональной структуры системы, в которую входят:
- усилительно-преобразующий блок; корректирующее устройство.
Процедуры определения алгоритмической и функциональной структур являются итерационными и тесно переплетаются друг с другом. Окончательное решение о структуре САУ принимается на основе компромисса между получаемым качеством управления, с одной стороны, и простотой и надежностью системы управления, с другой.
Если предположить, что основные функциональные элементы неизменяемой части системы уже выбраны, то задача синтеза в более узком смысле сводится к определению алгоритмической структуры САУ.
9.1.4 Основные этапы создания САУ
Этапы создания САУ можно представить в следующем порядке:
Этап 1. Формулировка цели управления, выбор управляемых переменных и каналов управления, формулировка требований к ним.
Этап 2. Выбор функциональной структуры (конфигурации системы), места включения корректирующих устройств.
Этап 3. Построение математической модели функционально необходимых элементов (в том числе, возможно, объекта управления), выбор вида задачи идентификации (параметрическая или непараметрическая).
Этап 4. Выбор эталонной передаточной функции, переходной или частотной характеристики.
Этап 5. Выбор и обоснование структуры корректирующих устройств.
Этап 6. Расчет численных параметров корректирующих устройств (параметрическая оптимизация).
Этап 7. Моделирование САУ. Исследование синтезируемой САУ с точки зрения достижения цели управления. Если качество САУ не удовлетворяет требованиям, необходимо изменить структуру системы, более конструктивно выбрать функционально необходимые элементы с учетом условий работы САУ или изменить структуру регулятора.
Этап 8. Формирование технического задания, предварительное эскизное проектирование, испытание опытных образцов, внедрение в производство.
Указанные этапы создания САУ и их порядок не являются догмой ? в зависимости от выбранного метода синтеза некоторые этапы могут быть пропущены или многократно повторены.
9.1.5 Классификация методов решения задач синтеза
Современные методы решения задачи синтеза многочисленны и могут быть представлены такими группами:
Методы параметрического синтеза, основывающиеся на волевом выборе структуры корректирующего устройства, с дальнейшим вычислением параметров, обеспечивающих реализацию выбранной критериальной стратегии синтеза, т. е. формализованного представления требований проектировщика к системе.Методы параметрического синтеза делятся на:
- методы, ориентирующиеся на синтез параметров типовых законов управления; методы синтеза параметров произвольно выбранных законов, которые часто относятся к управляющим устройствам, называемым корректирующими устройствами.
Основное место занимают методы параметрического синтеза типовых законов управления (интегральный, пропорциональный, дифференциальный и др.).
Методы синтеза по желаемым или эталонным динамическим характеристикам. Эти методы также опираются на определенные ограничения структуры проектируемого закона, но эти ограничения менее строгие. Идеология этих методов синтеза состоит в том, что на первом этапе синтеза задаются эталонные условия динамики системы, а на втором происходит декомпозиция математической модели САУ с вычленением из нее математической модели объекта управления. Оставшаяся часть образует закон управления. Методы синтеза, которые позволяют на основании математической модели объекта управления и формализованной критериальной стратегии синтеза сразу получать и структуру, и параметры необходимых законов управления. Это группа современных методов структурно-параметрического синтеза. В основном это методы синтеза оптимальных законов управления.Методы первых двух групп являются приближенными, методы третьей – точные.
9.1.6 Корректирующие устройства и способы их включения в САУ
Как уже упоминалось, корректирующие устройства служат для формирования такого закона управления, который обеспечил бы требуемое качество процесса управления. В том случае, когда закон управления известен и выбирается в виде комбинации некоторых типовых законов, корректирующее устройство называется регулятором.
В зависимости от способа включения корректирующего устройства в САУ различают: последовательное, встречно-параллельное и параллельное корректирующие устройства (типовые регуляторы включают, как правило, только последовательно).
Последовательное корректирующее устройство включают непосредственно в контур управления после элемента сравнения или (чаще) после предварительного усилителя (см. рис. 9.2а). Передаточная функция разомкнутой цепи скорректированной системы
![]() , (9-1)
, (9-1)
где ![]() ? передаточная функция разомкнутой некорректированной системы;
? передаточная функция разомкнутой некорректированной системы; ![]() ? передаточная функция последовательного корректирующего устройства.
? передаточная функция последовательного корректирующего устройства.
Встречно-параллельное корректирующее устройство (см. рис. 9.2б) представляет собой местную обратную связь (чаще всего отрицательную), которая охватывает один из элементов прямой цепи, которым часто бывает исполнительное устройство или выходной каскад усилителя мощности. Передаточная функция разомкнутой скорректированной системы
![]() , (9-2)
, (9-2)
где ![]() ? передаточная функция части системы, не охваченной обратной связью;
? передаточная функция части системы, не охваченной обратной связью; ![]() ? передаточная функция части системы, охваченной обратной связью;
? передаточная функция части системы, охваченной обратной связью; ![]() ? передаточная функция встречно-параллельного корректирующего устройства.
? передаточная функция встречно-параллельного корректирующего устройства.
Применение встречно-параллельной коррекции повышает стабильность характеристик системы в области рабочих частот. Это следует из (9-2), если учесть, что в диапазоне частот, где ![]() , частотная передаточная функция скорректированной системы
, частотная передаточная функция скорректированной системы
![]() (9-3)
(9-3)
перестает зависть от свойств звеньев, охваченных обратной связью, а определяется только свойствами корректирующего устройства. Это обстоятельство является большим достоинством встречно-параллельной коррекции, особенно, если звено ![]() является существенно нелинейным и его параметры меняются во времени. Вторым важным достоинством такого корректирующего устройства является то, что его вход подключен к выходу элемента с высоким уровнем сигнала, а это снижает требования к энергопотреблению самого корректирующего устройства.
является существенно нелинейным и его параметры меняются во времени. Вторым важным достоинством такого корректирующего устройства является то, что его вход подключен к выходу элемента с высоким уровнем сигнала, а это снижает требования к энергопотреблению самого корректирующего устройства.
Корректирующие обратные связи делятся на жесткие и гибкие. Жесткая обратная связь действует в системе, как в переходном, так и в установившемся режиме и реализуется безынерционным или апериодическим звеном. Гибкая обратная связь действует только в переходном режиме и реализуется либо дифференцирующим, либо инерционно-дифференцирующим звеном.
Параллельное (прямое) корректирующее устройство (см. рис. 9.2в) применяется не часто, но иногда позволяет при меньшей сложности обеспечить нужное преобразование сигнала управления. Например, параллельное соединение усилительного и апериодического звеньев (при условии соблюдения малой разности их коэффициентов передачи) позволяет получить реальное форсирующее звено с большой постоянной времени.
Формально всегда можно выбрать параллельное (прямое или обратное) корректирующее устройство так, чтобы получить результат, эквивалентный тому, что может быть получен при последовательной коррекции. Для этого необходимо приравнять правые части, например, уравнений (9-1) и (9-2) и разрешить полученное соотношение относительно ![]() или
или ![]() .
.
Коррекция по возмущению, при которой корректирующее звено включается в дополнительную прямую цепь, показана на структурной схеме рисунка 9.2г. Такая схема коррекции не влияет на свободное движение и устойчивость замкнутой системы, но улучшает ее качество за счет уменьшения динамической ошибки по компенсируемому возмущению.
С учетом принципа суперпозиции выражение для изображения сигнала рассогласования приобретает вид
![]() . (9-4)
. (9-4)
Из (9-4) следует, что если выбрать корректирующее устройство с передаточной функцией ![]() , то можно полностью устранить динамическую ошибку системы, независимо от вида возмущающего воздействия. Применение данного метода коррекции связанно с определенными техническими трудностями, прежде всего с тем, что получаемая передаточная функция корректирующего устройства
, то можно полностью устранить динамическую ошибку системы, независимо от вида возмущающего воздействия. Применение данного метода коррекции связанно с определенными техническими трудностями, прежде всего с тем, что получаемая передаточная функция корректирующего устройства ![]() оказывается практически нереализуемой (получаются чисто дифференцирующие звенья).
оказывается практически нереализуемой (получаются чисто дифференцирующие звенья).
Рассмотренные выше способы включения корректирующих устройств могут использоваться как самостоятельно, так и в комбинации друг с другом. Выбор способа включения представляет собой сложную инженерную задачу и зависит, прежде всего, от технической сложности реализации полученной передаточной функции.
9.2 Приближенные методы параметрического синтеза
9.2.1 Типовые законы управления, регуляторы и особенности из применения
Регулятор это автономное технического устройство (рис. 9.3), предназначенное для формирования по величине сигнала рассогласования ![]() , его производной и интеграла регулирующего воздействия
, его производной и интеграла регулирующего воздействия ![]() , которое непосредственно подается на исполнительный орган объекта управления.
, которое непосредственно подается на исполнительный орган объекта управления.
Технически типовой регулятор включает в себя задатчик, элемент сравнения, устройство, формирующее закон управления и, иногда, исполнительный механизм.
По признаку потребления энергии от внешнего источника регуляторы делятся на:
- регуляторы прямого действия, в которых для перестановки рабочего органа используется энергия самого регулируемого сигнала. В качестве примера можно привести широко распространенные регуляторы давления. Регуляторы прямого действия, как правило, очень просты, надежны и дешевы, однако не обеспечивают высокого качества регулирования и имеют ограничение по созданию усилий на рабочем органе; регуляторы непрямого действия, использующие для перестановки рабочего органа энергию внешнего источника. В зависимости от вида источника энергии они подразделяются на электрические (электронные), пневматические, гидравлические и комбинированные. Электрические регуляторы обладают возможностью относительно простого формирования любого закона управления, однако, в отличие от пневматических регуляторов, имеют ограничения для применения во взрыво - и пожароопасных средах. Гидравлические регуляторы позволяют формировать значительные усилия на регулирующем органе при небольших габаритах, но не всегда удовлетворяют требованиям промсанитарии.
В зависимости от алгоритма формирования управляющего сигнала на практике применяются следующие пять разновидностей типовых регуляторов: пропорциональный (П-регулятор), интегральный (И-регулятор), пропорционально-интегральный (ПИ-регулятор), пропорционально-дифференциальный (ПД-регулятор) и пропорционально-интегрально-дифференциальный (ПИД-регулятор).
а) П-регулятор имеет линейную статическую характеристику (усилительное звено, основные характеристики которого приводятся в лекции №6, п.4.2.1)
![]() , (9-5)
, (9-5)
где ![]() ? коэффициент передачи (усиления) регулятора, и передаточную функцию
? коэффициент передачи (усиления) регулятора, и передаточную функцию
![]() . (9-5а)
. (9-5а)
Как видно из (9-5), П-регулятор обеспечивает формирование управляющего воздействия, пропорционального величине сигнала рассогласования. Знак минус (характерно для всех регуляторов) показывает, что сигнал управления по знаку не совпадает с сигналом рассогласования (компенсирует его наличие).
Поскольку П-регулятор не вносит дополнительного отрицательного сдвига фаз, САУ с П-регулятором имеют хорошие динамические характеристики.
Недостатком систем с П-регулятором является наличие статической ошибки. Для отдельно взятого регулятора величина этой ошибки (на выходе регулятора) определяется из уравнения регулятора (9-5)
![]() , (9-5б)
, (9-5б)
а при работе регулятора в системе (рис. 9.1) ошибка от возмущения f(t) составляет
![]() , (9-5в)
, (9-5в)
где ![]() ? коэффициент передачи (усиления) объекта по каналу возмущения.
? коэффициент передачи (усиления) объекта по каналу возмущения.
Из (9-5в) видно, что ошибка в системе с П-регулятором обратно пропорциональна ![]() , предельное значение которого определяется требованиями к запасу устойчивости системы. П-регуляторы применяются для управления (преимущественно в системах стабилизации) малоинерционными объектами, когда для уменьшения статической ошибки величина
, предельное значение которого определяется требованиями к запасу устойчивости системы. П-регуляторы применяются для управления (преимущественно в системах стабилизации) малоинерционными объектами, когда для уменьшения статической ошибки величина ![]() может быть выбрана достаточно большой.
может быть выбрана достаточно большой.
б) И-регулятор формирует управляющее воздействие пропорциональное интегралу величины сигнала рассогласования (скорость воздействия пропорциональна величине рассогласования). Математическое описание в интегральной форме (идеальное интегрирующее звено, характеристики которого приводятся в лекции №6, п.4.2.2)
![]() , (9-6)
, (9-6)
где ![]() ? постоянная времени интегрирования. Передаточная функция регулятора соответствует идеальному интегрирующему звену и записывается в виде
? постоянная времени интегрирования. Передаточная функция регулятора соответствует идеальному интегрирующему звену и записывается в виде
![]() . (9-6,а)
. (9-6,а)
На входной ступенчатый сигнал И-регулятор реагирует линейным сигналом, причем за время ![]() выходной сигнал достигнет единицы.
выходной сигнал достигнет единицы.
Достоинством И-регулятора является нулевая статическая ошибка (вносится астатизм), в тоже время из-за внесения постоянного отрицательного сдвига фазы, равного –?/2, системы с И-регулятором обладают относительно худшими динамическими свойствами.
И-регуляторы целесообразно использовать только для управления практически безынерционными объектами. Если объект не обладает свойством самовыравнивания, то САУ с И-регулятором являются структурно неустойчивыми, т. е. не могут быть устойчивыми ни при каких настройках регулятора.
в) ПИ-регулятор формирует управляющее воздействие пропорционально величине и интегралу величины сигнала рассогласования, что может быть представлено в двух формах
![]() , (9-7)
, (9-7)
где ![]() ? коэффициент передачи (усиления) регулятора и
? коэффициент передачи (усиления) регулятора и ![]() ? постоянная времени, характеризующая скорость интегрирования (время изодрома) – два параметра настройки регулятора. Соответственно и передаточная функция ПИ-регулятора двухпараметрическая
? постоянная времени, характеризующая скорость интегрирования (время изодрома) – два параметра настройки регулятора. Соответственно и передаточная функция ПИ-регулятора двухпараметрическая
![]() . (9-7,а)
. (9-7,а)
Рассматривая частотную передаточную функцию регулятора в показательной форме
![]() , (9-7,б)
, (9-7,б)
можно заметить, что в области малых частот при ![]() ПИ-регулятор ведет себя как П-регулятор, а в области высоких частот ? как И-регулятор, т. е. он является астатическим и сочетает в себе достоинства П-регулятора в статике (низкие частоты) и И-регулятора ? в динамике. Реакция ПИ-регулятора на единичное ступенчатое воздействие (переходная характеристика) представляется мгновенным скачком величиной
ПИ-регулятор ведет себя как П-регулятор, а в области высоких частот ? как И-регулятор, т. е. он является астатическим и сочетает в себе достоинства П-регулятора в статике (низкие частоты) и И-регулятора ? в динамике. Реакция ПИ-регулятора на единичное ступенчатое воздействие (переходная характеристика) представляется мгновенным скачком величиной ![]() с последующим линейно растущим сигналом с наклоном
с последующим линейно растущим сигналом с наклоном ![]() (см. рис. 9.4).
(см. рис. 9.4).
Время изодрома ![]() имеет интересный физический смысл. Как видно из рисунка 9.4,
имеет интересный физический смысл. Как видно из рисунка 9.4, ![]() ? это, с одной стороны, время удвоения П-составляющей регулирующего воздействия ПИ-регулятора, а с другой – это время, на которое регулирующее воздействие ПИ-регулятора опережает аналогичное регулирующее воздействие И-регулятора. Значит, ПИ-регулятор обладает свойством упреждения: выходной сигнал сдвинут так, как будто интегрирование началось раньше начала действия входного сигнала на время изодрома (но это не положительный сдвиг фаз!). Этот факт подтверждается анализом ФЧХ ПИ-регулятора, полученного последовательным соединением форсирующего и интегрирующего звеньев (9-7а, вторая формула).
? это, с одной стороны, время удвоения П-составляющей регулирующего воздействия ПИ-регулятора, а с другой – это время, на которое регулирующее воздействие ПИ-регулятора опережает аналогичное регулирующее воздействие И-регулятора. Значит, ПИ-регулятор обладает свойством упреждения: выходной сигнал сдвинут так, как будто интегрирование началось раньше начала действия входного сигнала на время изодрома (но это не положительный сдвиг фаз!). Этот факт подтверждается анализом ФЧХ ПИ-регулятора, полученного последовательным соединением форсирующего и интегрирующего звеньев (9-7а, вторая формула).
В области рабочих частот ПИ-регулятор вносит в систему отрицательный фазовый сдвиг около (20-30)0. Это значительно меньше, чем И-регулятор, но больше, чем П-регулятор. Поэтому по динамическим свойствам ПИ-регулятор занимает промежуточное положение между И - и П-регулятором.
в) ПД-регулятор формирует управляющее воздействие пропорционально величине и производной (скорости) величины сигнала рассогласования
![]() , (9-8)
, (9-8)
где ![]() ? коэффициент передачи регулятора,
? коэффициент передачи регулятора, ![]() ? постоянная времени дифференцирования (время предварения). Передаточная функция ПД-регулятора двухпараметрическая
? постоянная времени дифференцирования (время предварения). Передаточная функция ПД-регулятора двухпараметрическая
![]() (9-8,а)
(9-8,а)
ПД-регулятор, представляя собой параллельное соединение идеального пропорционального и дифференциального звеньев, объединяет также и их динамические свойства. Поэтому в установившемся режиме, когда входной сигнал не изменяется, ПД-регулятор ведет себя как П-регулятор, но при изменении сигнала вырабатывает дополнительную составляющую, пропорционально производной от входного сигнала. Переходная характеристика ПД-регулятора представлена на рис. 9.5.
Как видно (9-8а), в статике передаточная функция ПД-регулятора совпадает с передаточной функцией П-регулятора, следовательно, системам с ПД-регулятором также присуща статическая ошибка. Вместе с тем в области рабочих частот ПД-регулятор вносит положительный (20-30)0 фазовый сдвиг в систему, чем увеличивает ее устойчивость. В идеальном варианте САУ с ПД-регулятором должны обладать наилучшими динамическими характеристиками, а при условии достаточно большого коэффициента передачи ![]() и небольшой статической ошибкой. Тем не менее, в чистом виде ПД-регуляторы практически не применяются, так как при наличии высокочастотных помех в составе регулируемой переменной операция дифференцирования резко ухудшает соотношение сигнал/шум, из-за чего снижается качество регулирования.
и небольшой статической ошибкой. Тем не менее, в чистом виде ПД-регуляторы практически не применяются, так как при наличии высокочастотных помех в составе регулируемой переменной операция дифференцирования резко ухудшает соотношение сигнал/шум, из-за чего снижается качество регулирования.
в) ПИД-регулятор представляет собой линейную комбинацию всех трех законов
![]() (9-9)
(9-9)
и имеет трехпараметрическую передаточную функцию (вариант с зависимыми настройками)
![]() . (9-9а)
. (9-9а)
Системы с ПИД-регулятором совмещают нулевую статическую ошибку (астатизм) с хорошей динамикой, поскольку в области рабочих частот ПИД-регулятор, как и П-регулятор, не дает большого отрицательного сдвига фаз, что хорошо демонстрирует логарифмическая АФЧХ (см. рис. 9.6).
Для повышения устойчивости ПИД-регулятора к помехам на практике соотношение между величиной времени изодрома и времени предварения выбирают из условия
![]() . (9-9б)
. (9-9б)
Соединения регуляторов между собой позволяют существенно менять их структуру и параметры. Так, последовательное соединение П - и И-регулятора позволяет при сохранении структуры И-регулятора, изменить время интегрирования в ![]() раз; параллельное соединение этих же регуляторов порождает структуру ПИ-регулятора. Последовательное соединение ПД - и И-регулятора порождает ПИ-регулятор, а параллельное ? ПИД-регулятор. Последовательное и параллельное соединение ПД и ПИ-регуляторов позволяет получить структуру ПИД-регулятора, но с разными параметрами.
раз; параллельное соединение этих же регуляторов порождает структуру ПИ-регулятора. Последовательное соединение ПД - и И-регулятора порождает ПИ-регулятор, а параллельное ? ПИД-регулятор. Последовательное и параллельное соединение ПД и ПИ-регуляторов позволяет получить структуру ПИД-регулятора, но с разными параметрами.
Характеристики типовых регуляторов, рассмотренные выше, по существу являются характеристиками идеальных динамических звеньев. Динамические характеристики реальных промышленных регуляторов могут существенно отличаться от идеальных, особенно за пределами области рабочих частот. Модель реального регулятора можно представить в виде последовательного соединения идеального регулятора и так называемого балластного звена (например, апериодического инерционного). Чем меньше величина постоянной времени балластного звена, тем ближе реальный регулятор к идеальному. Допустимые отклонения частотных характеристик реальных регуляторов от идеальных регламентируются стандартами и приводятся в паспортных данных промышленных регуляторов.
Вопросы самоконтроля и для подготовки к тестовому контролю:
