
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.316
Выравнивание нагрузок в двухдвигательном асинхронном приводе |
В. А. ИВАНОВ1, ст. преподаватель, |
Ключевые слова: электропривод, взаимосвязанный привод, двухдвигательный привод, частотно-регулируемый привод, переменный ток, частотный преобразователь.
О
дним из перспективных направлений развития систем электропривода (ЭП) является переход от однодвигательных механизмов, к механически или электрически взаимосвязанным многодвигательным системам, что позволяет увеличить быстродействие, надежность и значительно снизить массогабаритные показатели, по сравнению с однодвигательным аналогом соответствующей мощности.
Применение двухдвигательного привода дает существенные преимущества. В частности, установка двух электродвигателей вместо одного позволяет снизить маховый момент привода, в результате уменьшается не только время пуска, но и снижаются пусковые потери. При работе с нагрузкой, равной половине номинальной и меньше, может использоваться только один электродвигатель, второй отключается. Благодаря этому КПД привода при небольших нагрузках повышается, а надежность действия установки увеличивается. Необходимость в двухдвигательных приводах может возникнуть из-за отсутствия электродвигателей требуемой мощности, из-за конструктивных соображений, а также из-за стремления получить некоторые дополнительные возможности в отношении регулирования скорости.
В настоящее время ЭП переменного тока с электрическими асинхронными двигателями с к. з. ротором и импульсными системами управления (СУ) все более интенсивно вытесняют ЭП постоянного тока в тех сферах, где ранее безоговорочно доминировали последние. В перечне таких сфер выгодно выделяются тяговые ЭП электровозов, составляющие двухдвигательную электромеханическую систему [1].
Однако двухдвигательный привод не лишен и некоторых недостатков. Он более сложен по конструкции и обслуживанию, занимает большую площадь, стоимость его больше, чем однодвигательного привода такой же мощности. Особенно трудно подобрать электродвигатели для двухдвигательного привода, которые должны иметь не только одинаковые номинальные данные, но и одинаковые механические характеристики.
Существенным недостатком данного решения является неидентичность механических характеристик электродвигателей одного типа (серии). В случае с механически взаимосвязанными системами это приводит к неравномерному распределению нагрузок между приводами в статических и динамических режимах работы, а значит, к перегрузке электродвигателя, обладающего более жесткой механической характеристикой, а также к ухудшению динамики и дополнительным нагрузкам колебательного характера, которые увеличивают механический износ элементов привода, вызывают вибрацию и затрудняют достижение требуемой точности работы механизма.
Жесткость механической характеристики зависит от скольжения, которое в свою очередь определяется типом и характеристиками двигателя. При параллельном включении двигателей, имеющих равные скорости идеального холостого хода и связанных общим механическим валом, нагрузка между ними распределяется пропорционально жесткости их механических характеристик [2].
Это приводит к неравномерному распределению нагрузки между двигателями и быстрому выходу их из строя. Уровень эффективности функционирования ЭП во многом определяется возможностью СУ адаптивно выравнивать несимметрию параметров электрических двигателей.
Для анализа неравномерности нагрузки определим момент двигателя из приближенного уравнения механической характеристики асинхронного двигателя (формула Клосса) [3]:
 (1)
(1)
где M, s – момент и скольжение асинхронного электродвигателя;
Mk, sk – критический момент и скольжение электродвигателя соответственно.
Из диаграммы, приведенной на рисунке 1, видно, что электродвигатель – 1, обладающий более жесткой характеристикой, при совместной работе будет перегружаться за счет недогрузки электродвигателя – 2 с более мягкой характеристикой. Разность нагрузок тем значительней, чем на больший угол сдвинуты характеристики электродвигателей.
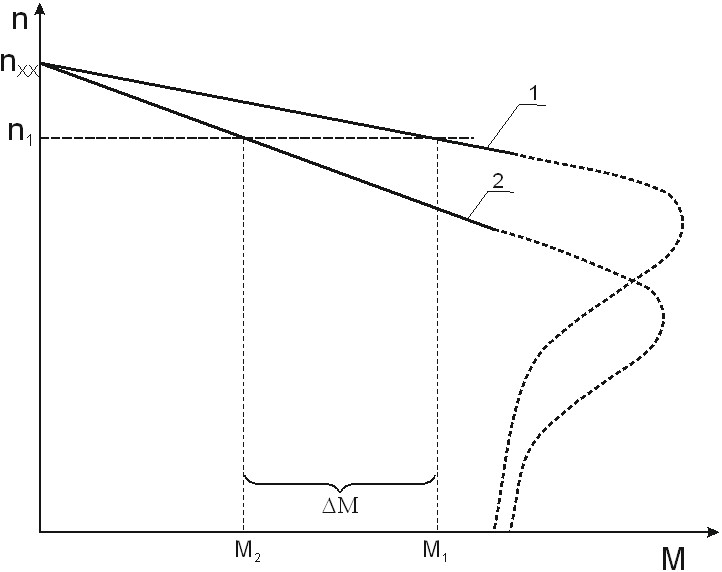
1 – механическая характеристика 1-го двигателя,
2 – механическая характеристика 2-го двигателя
Рисунок 1 – Характеристики двухдвигательного
привода
Т. к. для линейной части механической характеристики s < sk, то второе слагаемое знаменателя в формуле (1) существенно меньше первого, и им можно пренебречь. Тогда рабочую часть механической характеристики можно приближенно представить в линейной форме, где момент пропорционален скольжению:
![]() (2)
(2)
Для двухдвигательного ЭП уравнение момента примет вид:
![]() (3)
(3)
Перепишем выражение (3) относительно скольжения:
 (4)
(4)
где Мс – нагрузка ЭП.
Подставим это в выражение (1), тогда:
- нагрузка на валу 1-го двигателя:
 (5)
(5)
- нагрузка на валу 2-го двигателя:
 (6)
(6)
Т. е. к неравномерности нагрузки на валу электродвигателя при параметрической несимметрии приводит неравенство абсолютных значений Мk1, Мk2 и sk1, sk2.
Одним из вариантов выравнивания нагрузки двухдвигательного привода с асинхронными электродвигателями является применение частотных преобразователей (ПЧ).
Управление приводом такого рода может быть осуществлено как от одного общего преобразователя, так и от индивидуальных для каждого двигателя преобразователей [4]. В зависимости от конкретных технических требований находят применение оба варианта.
При проектировании или модернизации многодвигательных приводов могут быть рассмотрены различные варианты их построения, базирующиеся на применении общего (группового) или индивидуального регулируемого ЭП. В обоих случаях должно быть обеспечено равномерное распределение нагрузок между двигателями. И если для группового ЭП степень равномерности распределения нагрузки зависит от идентичности параметров двигателей, то для индивидуального регулируемого ЭП выравнивание нагрузки зависит от принятой структуры многодвигательной системы.
В качестве примера для выравнивания нагрузок двухдвигательного привода, рассмотрим использование частотного преобразователя Altivar 71 производства фирмы «Sсhneider Electric», учебная лаборатория которой открыта в КарГТУ на кафедре АПП.
Различают три способа выравнивания нагрузки с помощью встроенных функций преобразователя частот Altivar [5]:
1) выравнивание нагрузки с помощью функции: «компенсации скольжения» двигателя;
2) распределение нагрузки с помощью функции: «выравнивания нагрузки»;
3) выравнивание нагрузки с помощью конфигурации «ведущий – ведомый».
1. При питании двух двигателей, связанных общим механическим валом, от одного ПЧ может использоваться функция: «компенсация скольжения».
При полной идентичности характеристик обоих двигателей нагрузка между ними будет распределяться поровну. Однако практически вследствие разброса параметров они будут загружены неравномерно по аналогии с распределением нагрузки в двухдвигательном приводе при питании от сети.
Преимущества такого способа построения СУ:
– низкая стоимость;
– простота;
– надежность.
Недостатками является:
– получение оптимальных характеристик возможно только при использовании идентичных двигателей;
– выравнивание нагрузки между неидентичными двигателями будет ухудшаться с увеличением нагрузки;
– необходимость использования индивидуальной защиты для каждого двигателя.
Структурная схема СУ приводов по такому варианту приведена на рисунке 2.
2. При питании двигателей в многодвигательном ЭП от индивидуальных ПЧ (рисунок 3) может использоваться функция «выравнивания нагрузки» для улучшения распределения нагрузки между двигателями.
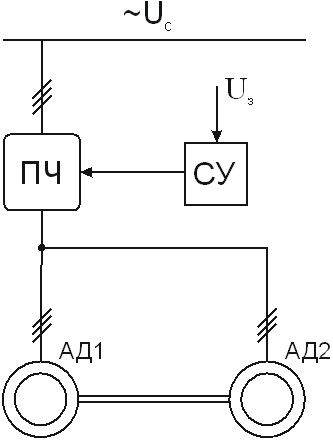
Рисунок 2 – Структурная схема двухдвигательного привода с одним общим преобразователем
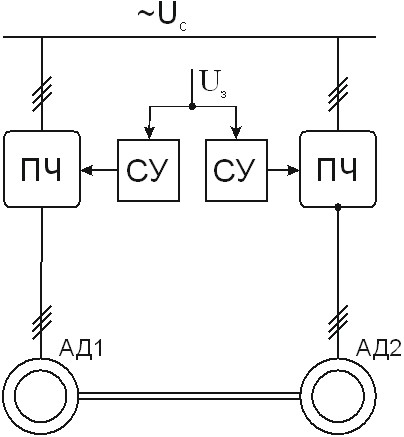
Рисунок 3 – Структурная схема двухдвигательного привода при питании двигателей от индивидуальных ПЧ
Работа функции «выравнивания нагрузки» аналогична распределению нагрузки с помощью компенсации скольжения, описанной выше. Однако вместо использования естественного скольжения двигателей функция «выравнивания нагрузки» применяет искусственное скольжение, формируемое преобразователями частоты. Такой способ эффективно выравнивает нагрузку между двигателями с неидентичными характеристиками, поскольку пользователь по существу формирует искусственные характеристики.
Преимущества данного способа:
– не требуется взаимосвязи между приводами;
– настраиваются индивидуальные характеристики двигателей.
Недостатки:
– выравнивание нагрузки между неидентичными двигателями будет ухудшаться с увеличением нагрузки;
– нет автоматической компенсации между двигателями.
3. Конфигурация «ведущий – ведомый». Такая система применяется для автоматического выравнивания нагрузки в случаях, когда два или более двигателей, питаемых от индивидуальных ПЧ, связаны кинематически друг с другом и, следовательно, вращаются принудительно с одинаковой скоростью (рисунок 4). Она может также применяться для улучшения характеристик многодвигательного привода при наличии упругой кинематической связи между двигателями.
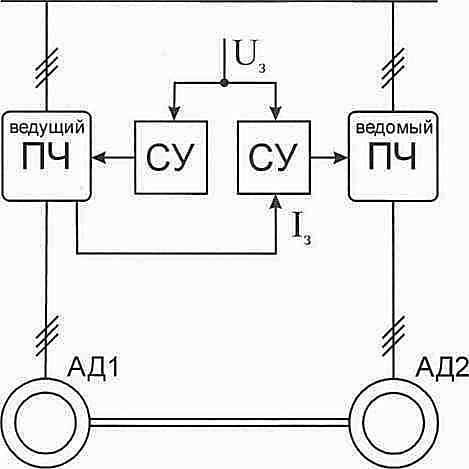
Рисунок 4 – Структурная схема двухдвигательного привода при конфигурации «ведущий – ведомый» ПЧ
Оба привода получают одинаковое задание скорости. Кроме того, ведомый ПЧ получает также от ведущего ПЧ сигнал задания, пропорциональный моменту. Ведомый ПЧ будет управлять двигателем таким образом, чтобы равномерно распределять нагрузку между двигателями. При управлении моментом ведомый ПЧ может управлять скоростью в соответствии с заданным значением (одинаковым для обоих приводов) в пределах настраиваемой зоны нечувствительности. При достижении внутреннего или внешнего ограничения преобразователь переходит автоматически к регулированию скорости.
Преимуществом данной структуры построения многодвигательного кинематически связанного ЭП является автоматическое выравнивание нагрузки на валах двигателей при поддержании постоянства скорости.
Недостатком может служить тот факт, что не все частотные преобразователи поддерживают функцию «ведущий – ведомый». Примером может служить более простой частотный преобразователь Altivar 312 упомянутой выше фирмы «Sсhneider Electric».
Применение частотных преобразователей фирмы «Sсhneider Electric», например Altivar 71, в многодвигательном частотно – регулируемом ЭП, позволяет улучшить распределение нагрузки между двигателями путем выбора способа выравнивания нагрузок. Что приводит к повышению надежности, времени безаварийной работы и увеличению межремонтных интервалов. А это в свою очередь снижает эксплуатационные затраты при использовании многодвигательных ЭП.
Одним из вариантов применения рассмотренных способов выравнивания нагрузки является двухдвигательный привод грузовой тележки, используемой на металлургическом производстве, кинематическая схема которой приведена на рисунке 5. Система управления и выравнивания нагрузок для которого была построена по третьему, рассмотренному выше варианту, с использованием частотных преобразователей Altivar 71.
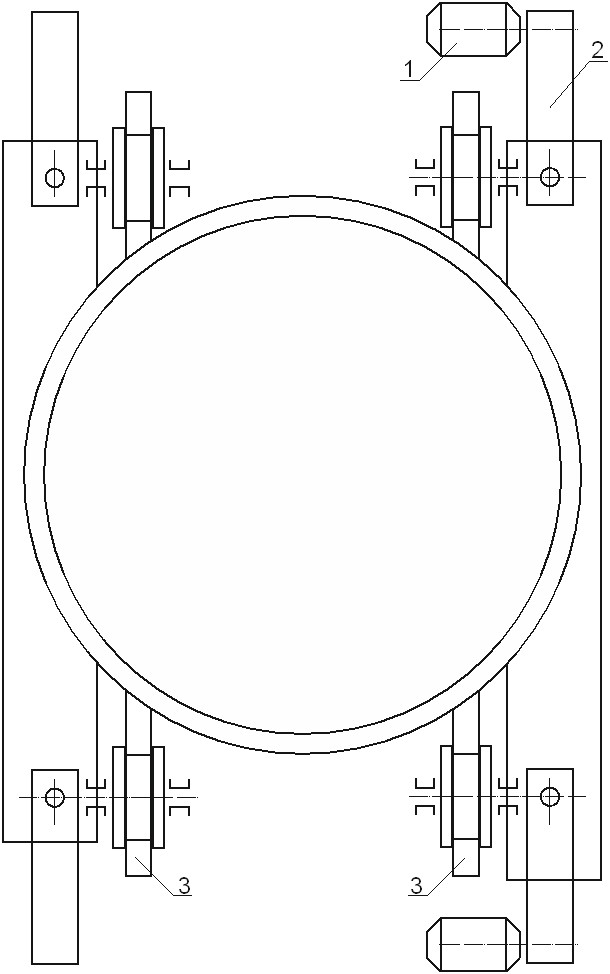
1 – электродвигатель; 2 – редуктор;
3 – направляющие рельсы
Рисунок 5 – Кинематическая схема грузовой тележки
СПИСОК ЛИТЕРАТУРЫ
1. Справочник по автоматизированному электроприводу / Под ред. и . – М.: Энергоатомиздат, 1983. – 616 с.
2. и др. Анализ неравномерности нагрузки двигателей при их параметрической несимметрии в двухдвигательном тяговом электроприводе. Вiсник КДПУ iмeнi Михайла Остроградського. Випуск 6/2007 (47).
3. , Статическая модель АД // Проблемы новых машин и технологий: Сб. научных трудов КГПИ. – Кременчуг: КГПИ, 2000. – Вып. 1/2000 (8).
4. , , Анализ динамических характеристик частотно-регулируемого электропривода с фильтром на выходе инвертора // Електромеханiчнi i енергозберiгаючi системи. Вип. 2/2007 (2).
5. ATV71. Преобразователи частоты для асинхронных двигателей. Руководство по программированию. atv71_рук-во по програм_ru_v2 2005-12.
