Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ ГОРОДА МОСКВЫ
ЦЕНТРАЛЬНЫЙ АДМИНИСТРАТИВНЫЙ ОКРУГ
ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБЩЕОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ГОРОДА МОСКВЫ «РОМАНОВСКАЯ ШКОЛА»
«Механика, шестеренки и робофутбол»
Авторы:
Донской Алексей,
Романов Марк,
ученики 7 «В» класса
Руководитель проекта:
,
учитель физики
Москва
2017
Оглавление:
Введение……………………………………………………………….....3 Глава 1. Обобщение литературы по теме «Механика». Расчет передаточного числа…………………………………………………….5 Глава 2. Развитие и современные достижения робототехники…………………………………………………………...8 Глава 3. Конструирование роботов-футболистов, создание макета футбольного поля и моделирование игры…………...……………….12 Заключение………………………………………………………….….15 Литература……………………………………………………….…..…16 Приложение………………………………………………………….…18Введение
В современном мире трудно представить жизнь человека без использования машин разного предназначения - это и простые механизмы, и более сложные машины. Машиной называют механизм или устройство, выполняющее механические движения, служащее для преобразования энергии, материалов или информации с целью облегчения или замены физического, или умственного труда человека и повышения его производительности.
Необходимым элементом в большинстве механизмов является шестерня. Шестерня или зубчатое колесо - это основная деталь зубчатой передачи в виде диска с зубьями на цилиндрической или конической
поверхности, входящими в зацепление с зубьями другого зубчатого колеса. В машиностроении принято малое зубчатое колесо называть шестернёй, а большое — колесом. Однако часто все зубчатые колёса называют шестернями.
Представим знакомый нам всем предмет - велосипед. Проще всего ехать в гору, когда малая шестерня спереди, а большая сзади. Хотя педалями легче крутить меньшую шестерню, понадобится множество вращений, чтобы заставить заднее колесо вращаться, то есть скорость велосипеда будет ниже.
Очень важно, как разместить, то есть в каком порядке разместить шестерни. Авторы данной работы задались целью создать механическое устройство, например, сконструировать робота с высокой маневренностью.
Для эффективной демонстрации решили сконструировать и создать макет футбольного поля и роботов - футболистов.
Для увеличения маневренности - рассчитать передаточные числа и эти расчёты применить в конструировании роботов.
Все вышеизложенное подчеркивает актуальность выбора темы данного проекта «Механика, шестеренки и робофутбол».
Цель: расчет передаточного числа и применение расчетов для улучшения маневренности сконструированного робота-футболиста.
Задачи:
Обобщить литературу по темам: «Машины», «Расчет передаточного числа», «Робототехника»; Собрать «простые конструкции», например, платформы для расчета передаточного числа; Рассчитать передаточные числа для нескольких сочетаний шестеренок; Выявить оптимальные сочетания шестеренок для улучшения маневренности конструкций; Испытать динамические характеристики данных конструкций; Сконструировать роботов-футболистов с соответствующим дизайном; Создать макет футбольного поля; Продемонстрировать созданные конструкции в действии.Методы:
Анализ и обобщение литературы по выбранной теме; Конструирование. Математические расчеты; Проведение эксперимента; Интерпретация результатов экспериментов; Фотографирование; Видеосъёмка; Моделирование.Глава 1. Обобщение литературы по теме «Механика». Расчет передаточного числа.
Изменение положения тел в пространстве относительно других тел с течением времени называется механическим движением. Движение тел описывается законами механики. Механика – это наука о движении и взаимодействии тел. Название науки происходит от греческого слова «mechanike». [1] Термин «механика» впервые появился в сочинениях древнего философа Аристог. до н. э.) и означает по современным понятиям «сооружение», «машина». Первые простейшие машины появились в древности, еще задолго до возникновения слова «механика» – это рычаг, клин, колесо, наклонная плоскость.
Законы механики были сформулированы великим английским ученым Исааком Ньютоном и лежат в основе классической механики, которая изучает движение материальных тел с малыми по сравнению со скоростью света скоростями. [2] Релятивистская механика изучает движение тел с околосветовыми скоростями [3], а квантовая механика - движение и взаимодействие элементарных частиц [4].
В России первые труды по механике принадлежат (1711-1765) [5], а также (1821-1894) [6], (1850-1891) [7], (1857-1935) [8], (1847-1921) [9] и многим другим.
Советский ученый-механик (1910-2003) писал: «Механика в широком смысле этого слова называется наука, посвященная решению любых задач, связанных с изучением движения и равновесия тел и происходящих при этом взаимодействий между телами. Теоретическая механика представляет собой часть механики, в которой изучаются общие законы движения и взаимодействия материальных тел, … Прикладная механика составляет различные общие и специальные технические дисциплины, посвященные проектированию и расчету всевозможных конкретных сооружений, двигателей, механизмов и машин или иных частей (деталей)» [10].
Машина - это устройство, выполняющее механические движения, служащее для преобразования энергии, материалов или информации с целью облегчения или замены физического, или умственного труда человека и повышения его производительности. В машинах энергия передается через механизмы с вращающимися звеньями. Звено же – это группа деталей, соединенных между собой и движущихся как одно целое.
Все механические передачи разделяют на две основные группы: передачи, основанные на использовании трения (ременные, фрикционные); передачи, основанные на использовании зацепления (зубчатые, червячные, цепные, винтовые).
Основными характеристиками механизмов, передающих вращение являются: передаточное отношение, вращающий момент, коэффициент полезного действия (КПД).
Передаточное отношение может быть постоянным и переменным, изменяющимся плавно или ступенями (коробки скоростей). Механизмы с плавным изменением передаточного отношения называются вариаторами.
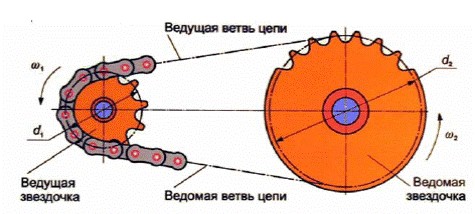
Авторы предлагают представить знакомый нам всем предмет – велосипед, обратим внимание на его цепную передачу. В зависимости от передаточного соотношения один оборот педалей может соответствовать разному числу оборотов колеса.
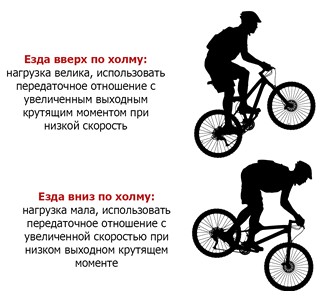
Мы знаем, что проще всего ехать в гору, когда малая шестерня спереди, а большая сзади. Это необходимо, чтобы колесо велосипеда крутилось медленнее, при этом сила человека, приложенная на педали, была наименьшей, а выходной крутящий момент на колесе наибольшим. Мы наблюдаем действие «золотого правила механики»: во сколько раз выигрываем в силе, во столько раз проигрываем в расстоянии.
В приведенном примере мы наблюдаем изменение первоначальной энергии полученной ведущей звездочкой по величине и направлению. Величину такого изменения будет определять передаточное отношение. Оно описывает одну из важнейших характеристик преобразования энергии при вращательном движении, определяемую как отношение частоты или скорости вращения элемента, получающего энергию, к тем же параметрам элемента, отдающего энергию.
Передаточное число обозначается – «u» (иногда используется обозначение «i»). В общем случае находится как отношение угловой скорости ведущего элемента (?1) механической передачи к угловой скорости ведомого элемента (?2) или отношение частоты вращения ведущего элемента (n1) к частоте вращения ведомого элемента (n2) или отношение числа зубьев ведущего элемента (z1) к числу зубьев ведомого элемента (z2).
![]()
![]() ;
; ![]()
![]()
Передаточное отношение u12 определяется при ведущем колесе 1, передаточное отношение u21 определяется если ведущим является колесо 2.
Необходимым элементом в большинстве механических передач является шестерня. Шестерня или зубчатое колесо - это основная деталь зубчатой передачи в виде диска с зубьями на цилиндрической или конической поверхности, входящими в зацепление с зубьями другого зубчатого колеса. В машиностроении принято малое зубчатое колесо называть шестернёй, а большое — колесом. Однако часто все зубчатые колёса называют шестернями.
Изобретатель шестерни не известен. В истории шестерни в своих трудах упоминаются: [11] Ктезибеем – он использовал древнее зубчатое колесо в своих водяных часах во II век до н. э. и Архимедом – в своем сочинении о применении шестерен в III веке до н. э. Есть данные о использовании шестерен Римлянами в начале новой эры. В работах Леонардо да Винчи, в чертежах некоторых механизмов присутствуют шестерни с формой зуба близкой к современной.
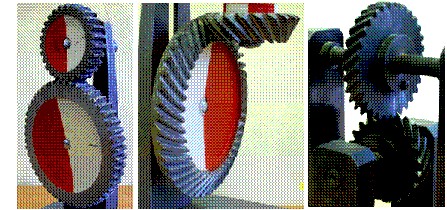
На рисунке представлены (слева на право) - цилиндрическая прямозубая передача, коническая косозубая передача, винтовая передача.
Авторы данной работы задались целью создать механическое устройство, например, сконструировать робот с высокой маневренностью. Авторы предположили, что для передачи вращения в конструкции робота целесообразно применить рассмотренную выше зубчатую передачу, благодаря постоянству передаточного отношения, компактности, плавности и надежности. В конструкции робота очень важным оказалось в каком порядке разместить шестерни и подобрать их диаметр.
Глава 2. Развитие и современные достижения робототехники.
Еще во времена античности появились идеи создания технических средств, похожих на человека, и даже были предприняты первые попытки по их созданию. Статуи богов с подвижными частями тела (руки, голова) появились еще в Древнем Египте, Вавилоне, Китае.
Обобщая литературу по данной теме авторам встретились упоминания об искусственном человеке (3 век до н. э.), которым был бронзовый великан Талос, построенный Гефестом для охраны острова Крит от врагов [12]. В «Илиаде» Гомера (9 век до н. э.) божественный кузнец Гефест выковывал механических служанок [13]. В работах Платона (5 век до н. э.) выражались идеи, имеющие отношение к человеческому мышлению и механике машин [14]. Блестящий философ и математик Архит из Тарентума, друг Платона, сконструировал деревянного голубя, который мог летать и управлялся струей пара [15].
В средние века большой популярностью пользовались различного рода автоматы, основанные на использовании часовых механизмов. Были созданы всевозможные часы с движущимися фигурами людей, ангелов и т. п. К этому периоду относятся сведения о создании первых подвижных человекоподобных механических фигур – андроидов. Так, андроид алхимика Альберта Великого (1193 – 1280) представлял собой куклу в рост человека, которая, когда стучали в дверь, открывала и закрывала ее, кланяясь при этом входящему [16].

В 13 веке Альберт Великий создал автомат, ставший впоследствии известным как «говорящая голова», способный воспроизводить человеческий голос. В 1495 году Леонардо да Винчи разработал детальный проект механического человека, способного двигать руками и поворачивать голову. А в 1500 году он построил механического льва, который при въезде короля Франции в Милан выдвигался, раздирал когтями грудь и показывал герб Франции. Работы по созданию андроидов достигли наибольшего развития в XVIII в. одновременно с расцветом часового мастерства.
Французский механик и изобретатель Жак де Вокансон (1709-1789) создал в 1738 году первое работающее человекоподобное устройство (андроид) , которое играло на флейте. «Флейтист» был ростом с человека. Подвижными пальцами он мог исполнять 11 мелодий с помощью заложенной в него программы [17].
Само слово «роботика» (или «роботехника», «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году [21].
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком [22].
Робототе?хника (от робот и техника; англ. robotics - роботика, роботехника) - прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой интенсификации производства. Робототехника опирается на такие дисциплины, как: электроника, механика, телемеханика, механотроника информатика, а также радиотехника и электротехника. Выделяют : строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику [25].
Важнейшие классы роботов широкого назначения: манипуляционные и мобильные роботы.
Компоненты роботов:
- Приводы: это «мышцы» роботов. В настоящее время самыми популярными двигателями в приводах являются электрические, но применяются и другие, использующие химические вещества или сжатый воздух. Двигатели постоянного тока: в настоящий момент большинство роботов используют электродвигатели, которые могут быть нескольких видов. Шаговые электродвигатели: они поворачиваются пошагово на определённый угол под управлением контроллера. Это позволяет обойтись без датчика положения, так как угол, на который был сделан поворот, заведомо известен контроллеру. Пьезодвигатели: принцип их работы весьма оригинален: крошечные пьезоэлектрические ножки, вибрирующие с частотой более 1000 раз в секунду, заставляют мотор двигаться по окружности или прямой. Преимуществами подобных двигателей являются высокое нанометрическое разрешение, скорость и мощность, несоизмеримая с их размерами. Воздушные мышцы: простое, но мощное устройство для обеспечения силы тяги. При накачивании сжатым воздухом мышцы способны сокращаться до 40 % от своей длины. Электроактивные полимеры: это вид пластмасс, который изменяет форму в ответ на электрическую стимуляцию. Они могут быть сконструированы таким образом, что могут гнуться, растягиваться или сокращаться. Эластичные нанотрубки: это - многообещающая экспериментальная технология, находящаяся на ранней стадии разработки [24].
В современном мире робототехника стремительно развивается и проникает во многие сферы нашей жизни начиная с промышленности и медицины, беспилотных разведчиков [20] и заканчивая сферами бытового применения. Японские разработчики создают роботов для оказания помощи пожилым людям, космическое агентство NASA разрабатывает новое поколение исследователей космоса и других планет, иные компании - ищут способы применения роботов для новых видов развлечений.
Проанализировав и обобщив литературу по данной теме, авторы пришли к выводу, что в настоящее время робототехника наиболее активно развивается по следующим направлениям:
1.Промышленная робототехника;
2.Мобильная робототехника;
3.Микро - и наноробототехника.
Каждое из этих направлений отличается соответствующими новыми технологиями. В настоящее время в мире имеется свыше миллиона различного вида роботов. Применяемые роботы имеют как простую, так и очень сложную конструкцию и отличаются по относительным размерам в миллионы раз.
Современные промышленные роботы, снабженные нейрокомпьютерами, могут опознавать изображения, понимать речь человека, принимать оптимальные решения и самообучаться. [19] В промышленности роботы используются для очень ограниченного числа операций, выполняемых по многу часов в день, без свойственных человеку усталости, раздражения и ошибок. К этой категории относятся манипуляторы, основание которых обычно монтируют неподвижно. Они особенно удобны для выполнения утомительных или монотонных операций в промышленности. Манипуляторы также используются в средах, вредных или опасных для жизни.
Мобильные роботы, созданные на базе самых последних достижений науки и техники, применяются практически во всех сферах человеческой деятельности. они используются в медицине для помощи престарелым людям и инвалидам[18] и сотрудничают с хирургами; работают с опасными химическими и радиоактивными веществами; обеспечивают безаварийную работу нефте - и газопроводов, ведя контроль состояния внутренней поверхности труб.
Мобильные роботы применяются в таких областях деятельности, где участие человека ограничено, например, в условиях космоса и при глубоководных работах; в военных операциях; для работы в условиях техногенных и природных катастроф.

Широкое распространение в последнее время получили шагающие роботы, это роботы, имитирующие животных и перемещающиеся при помощи ног. Американские инженеры из компании Micromagic Systems создали гигантского шестиногого робота-вездеход. Вездеход разработчики назвали Mantis (от английского «богомол»). Mantis - самый большой робот в мире. Он оснащен дизельным двигателем. Его вес около двух тонн. Богомол способен передвигаться по любой местности. Каждая из шести конечностей модели может работать автономно, что позволяет роботу маневрировать, аккуратно обходя сложные препятствия, и при необходимости освобождать себе путь, разбирая завалы. Кабина робота оборудована панелью управления, которая обеспечивает оператора визуальной информацией о функционировании робота, например, о положении каждой его конечности.
Наноробототехника как новое самостоятельное направление в науке и технике сформировалось за последние два десятилетия. [23] Сущность нанотехнологий заключается в способности работать на молекулярном уровне с отдельными атомами и частицами и создавать структуры или приборы с принципиально новой молекулярной организацией, имеющих размеры 1 – 100 нм. Важной проблемой нанотехнологий является проблема манипулирования нанообъектами. Создание нанороботов позволит автоматизировать молекулярное производство, предоставив человеку управление нано процессами в привычном для него размерном мире.
В целом, авторы данной работы пришли к выводу, что технический процесс неотъемлемо связан с развитием и модернизацией созданных ранее и разрабатываемых ныне механизмов и технологий.
Глава 3. Конструирование роботов-футболистов, создание макета футбольного поля и моделирование игры.
С древних времен человек создает машины, то есть механизмы или устройства, выполняющие механические движения, служащее для преобразования энергии, материалов или информации с целью облегчения или замены физического, или умственного труда человека и повышения его производительности. Основным элементом большинства механизмов является шестерня. Правильное сочетание пар шестеренок позволяет улучшить подвижность, маневренность и мощность используемых машин.
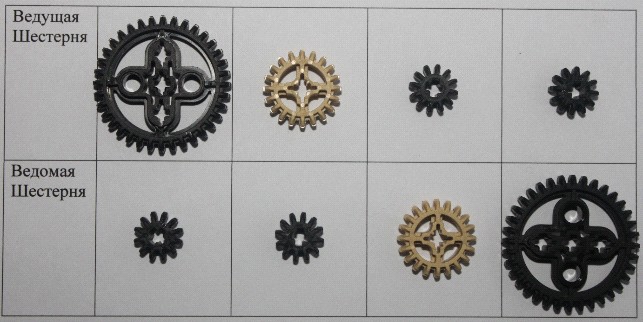
Авторы провели эксперимент и сравнили 4 пары шестерёнок.
Соотношение числа зубьев на шестернях, участвующих в эксперименте:
u12 =12/48=0,25
u12 =12/20=0,6
u12 =20/12=1,6
u12 =48/12=4
В нашем эксперименте: 12/20 = 0,6. Авторы записали ответ в виде 12/20 или 0,6/1.Такое передаточное отношение означает, что большая ведущая шестерня должна совершить 0,6 оборота, чтобы меньшая ведомая шестерня совершила один оборот. Это имеет смысл, так как ведомая шестерня меньше, а значит вращается быстрее.

В нашем эксперименте: 20/12 = 1,6. Авторы записали ответ в виде 20/12 или 1,6/1.Такое передаточное отношение означает, что меньшая ведущая шестерня должна совершить полтора оборота, чтобы большая ведомая шестерня совершила один оборот. Это имеет смысл, так как ведомая шестерня больше, а значит вращается медленнее.
В нашем эксперименте: 12/48 = 0,25. Авторы записали ответ в виде 12/48 или 1/4. Такое передаточное отношение означает, что большая ведущая шестерня должна совершить 0,25 оборота, чтобы меньшая ведомая шестерня совершила один оборот. Это имеет смысл, так как ведомая шестерня меньше, а значит вращается быстрее.
В нашем эксперименте: 48/12 = 4. Авторы записали ответ в виде 48/12 или 4/1. Такое передаточное отношение означает, что меньшая ведущая шестерня должна совершить полтора оборота, чтобы большая ведомая шестерня совершила один оборот. Это имеет смысл, так как ведомая шестерня больше, а значит вращается медленнее.
Сборка опытных образцов.

Исходными материалами являлись детали Lego Techniс от разных моделей, имеющиеся у авторов уже в наличие. Недостающие детали приобретались дополнительно.
Для сборки одной испытуемой платформы для определения передаточного числа авторам потребовалось: 20 деталей.
Всего для расчета передаточного числа потребовалось создать четыре платформы.

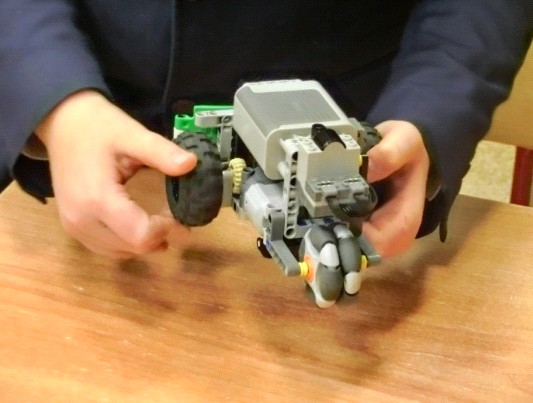
На создание одного робо-футболиста потребовалось: 125 деталей. Из них: 2 шины, 1 многофункциональное колесо, 2 рамы,2 мотора с соединительными проводами, 1 RCU приемник, 1 рама с дополнительными креплениями, 2 специальных бампера для футбола, 2 диска, 4 уголка, 1 блок питания с 6 батарейками, 2 большие шестерни с 20 зубьями, 2 маленьких шестерни с 12 зубьями, 2 оси, 2 полуоси, 2 соединительных элемента с 9 разъёмами, 6 маленьких шайб, 3 больших шайбы, 4 маленьких оси, 38 черных штифтов, 6 больших синих штифтов, 12 маленьких штифтов, 2 соединительных цилиндра,5 t-образных соединительных цилиндра и дополнительные соединительные детали разных форм.

Соединив все детали в правильной последовательности, авторы провели ряд тестов, в ходе которых была выявлена зависимость угла разворота робота на постоянной скорости, то есть маневренности от передаточного отношения пары шестерней робота-футболиста.
Количество зубьев, шт. (Ведущая шестерня) | 12 | 12 | 20 | 48 |
Количество зубьев, шт. (Ведомая шестерня) | 48 | 20 | 12 | 12 |
Угол поворота Ведомой шестерни, ? | 0,25 | 0,6 | 1,6 | 4 |
Радиус поворота | 180 | 290 | 360 | 220 |

При заданной скорости 1 м/с, рассчитана зависимость угла разворота от сочетания шестерней, то есть передаточное отношение. С помощью этих данных авторами было выявлено наиболее эффективное сочетание шестерней 20 к 12.
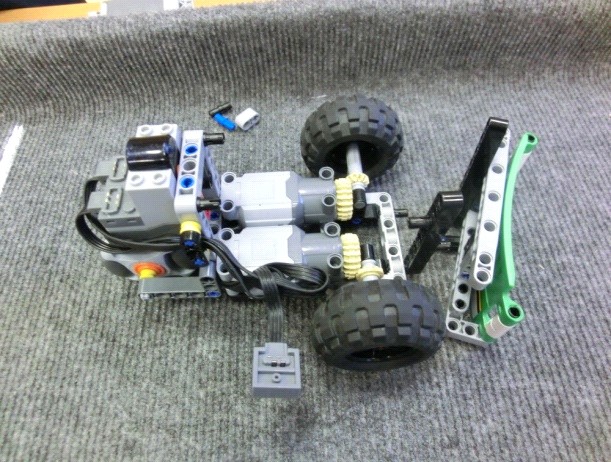
Далее авторами было собрано два опытных образца: роботы - футболисты.

Для демонстрации хорошей маневренности роботов был создан макет футбольного поля. Авторы продемонстрировали своих роботов сверстникам и предложили сыграть в футбол. Но оказалось, что эта игра заинтересовала и старшеклассников.
Заключение
В век бурного развития робототехники и информационных технологий механика как наука не утратила своей актуальности, так как от эффективности механических конструкций зависят возможности создаваемых роботов. На основе анализа литературы авторы пришли к выводу, что в большинстве машин для передачи вращения используются механические передачи, в основном зубчатые, основным элементом которых является шестерня. Кроме того, анализ подтвердил, что размеры шестерней и порядок их расположения напрямую влияют на силу передаваемой энергии вращения и ее направление. Зубчатая передача является основным элементом конструкции ходовой части и приводов роботов.
В ходе выполнения задач проекта для расчета передаточного числа авторами собрано четыре платформы. Соединив все детали в правильной последовательности, авторы провели ряд тестов, в ходе которых была выявлена зависимость угла разворота на постоянной скорости, то есть маневренности от передаточного отношения пары шестерней робота –футболиста.
С помощью полученных результатов и их анализа авторами было выявлено наиболее эффективное сочетание шестерней для наилучшей маневренности роботов: 20 к 12.
По итогам экспериментов с испытуемыми платформами авторами были собраны 2 опытных образца и создан макет футбольного поля. Демонстрация моделирования игры роботов-футболистов зафиксирована с помощью фото и видеосъёмки.
В заключении мы хотим сказать о практической значимости нашего проекта. Выявление оптимальных сочетаний шестерней позволит изобретателям роботов –футболистов создать аппараты с наилучшей маневренностью для любителей спорта, которые начинают создавать любительские команды по всему миру.
В такой игре менее значимы физические параметры человека, а более важны умственные и стратегические умения. Робофутбол сплотит людей и позволит принимать участие инвалидам.
Полную версию презентации можно увидеть, перейдя по данной ссылке:
https://docs. /presentation/d/1X6wP7ev3Q8oyzbMNVvxyJOEvaeSmm9JWkBirfb68U8I/edit? usp=sharing
Видео работы можно увидеть на инстаграме: https://www. /mehshesrobo/
Литература
1.Аристотель. Физика.-М.: Гос. социально-экономическое изд-во, 1936.- 190с.
2. ьютон. - М.: «Молодая гвардия», 1987, серия «Жизнь замечательных людей».
3. специальной и общей теории относительности (общедоступное издание). / Альберт Эйнштейн. Перевод с 12-го изд. под редакцией .-М.: Госиздат, 1922.
4.Манжит Кумар. Квант.- CORPUS/перевод на рус. И. Кагановой.- М.: изд. Группа «АСТ», 2013, серия «Элементы», библиотека фонда «Династия».
5. Павлова, Васильевич Ломоносов (1711-1765) : [к 275-летию со дня рождения] / , . - М. : [б. и.], 1986. - 462 с.
6., Пафнутий Львович Чебышёв. Краткий биографический очерк // Полное собрание сочинений. Т. 1. Теория чисел. — М.-Л. : Изд-во АН СССР, 1944. — 342 с. — С. 5—9.
7. // Большая советская энциклопедия: [в 30 т.] / под ред. гл. ред. — 3-е изд. — М.: Советская энциклопедия, 1973. — Т. 12 : Кварнер — Конгур. — С. 356.
8. в воспоминаниях современников. 2-е изд / Сост. , . — Тула: Приокское книжное изд-во, 1983. — 288 с.
9.. Аналитическая механика.- Изд. «Едиториал УРСС».-2004.
10. Краткий курс теоретической механики: учеб. Для вузов.-10 изд., перераб. И доп. – М.: Высш. шк., 1986- 416 с. , ил.
11. С. Михаль. Часы. От гномона до атомных часов. Перевод с чешского Р. Е, Мельцера.- М.: Знание, 1983.
12. Гефест // Мифы народов мира.- М., 1991- 300с.
13. Гомер. Илиада. / Пер. . Ст. и прим. . Отв. ред. . (Серия «Литературные памятники»). Л.: Наука, 1990. 576 с
14. Платон и его эпоха/ , - Годи, и др./ М.: Наука,1979
15.Ван дер Пробуждающаяся наука. Математика древнего Египта, Вавилона и Греции. Перевод с голландского . — М.: Физматгиз, 1959.
16.Мехатроника: Пер с япон. / и др. — М.: Мир, 1988. — С. 318. — ISBN 5-03-000059-3
17.https://ru. wikipedia. org/wiki/%D0%90%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4
18.https://ru. wikipedia. org/wiki/%D0%A1%D0%BE%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D1%80%D0%BE%D0%B1%D0%BE%D1%82
19.https://ru. wikipedia. org/wiki/%D0%9F%D1%80%D0%BE%D0%BC%D1%8B%D1%88%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D0%B9_%D1%80%D0%BE%D0%B1%D0%BE%D1%82
20.https://ru. wikipedia. org/wiki/%D0%91%D0%BE%D0%B5%D0%B2%D0%BE%D0%B9_%D1%80%D0%BE%D0%B1%D0%BE%D1%82
21.https://ru. wikipedia. org/wiki/%D0%90%D0%B7%D0%B8%D0%BC%D0%BE%D0%B2,_%D0%90%D0%B9%D0%B7%D0%B5%D0%BA
22.https://ru. wikipedia. org/wiki/%D0%A2%D1%80%D0%B8_%D0%B7%D0%B0%D0%BA%D0%BE%D0%BD%D0%B0_%D1%80%D0%BE%D0%B1%D0%BE%D1%82%D0%B5%D1%85%D0%BD%D0%B8%D0%BA%D0%B8
23.https://ru. wikipedia. org/wiki/%D0%9D%D0%B0%D0%BD%D0%BE%D1%80%D0%BE%D0%B1%D0%BE%D1%82
24.https://ru. wikipedia. org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82
25.https://ru. wikipedia. org/wiki/%D0%A0%D0%BE%D0%B1%D0%BE%D1%82%D0%BE%D1%82%D0%B5%D1%85%D0%BD%D0%B8%D0%BA%D0%B0

Приложение