
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Этот пример, несколько противоречит алгоритму классической ФС, поскольку, по-видимому, пропускает стадию афферентного синтеза и принятия решения – образ потребного результата “чашки кофе” уже сформирован потребностью, четко определившей мотивацию “иди на кухню”, для которой уже хорошо известна программа поведения, сформированная в “мышечной памяти” и ФС лишь ожидает пусковой стимул для ее реализации. Пусковым стимулом, может служить перемещение этой мотивации на уровень доминирующей, когда, например, ослабляются другие мотивации.
Вероятно, такое целенаправленное поведение мы называем “подсознательным” – т. е. то, которое реализуется без стадий афферентного синтеза и принятия решения, не вовлекая верхние уровни центральной нервной системы (ЦНС) в формирование цели и программы поведения.
С другой стороны, если в процессе удовлетворения какой-либо потребности, обнаруживается сигнал о возможности быстрого, с минимальными энергетическими затратами, удовлетворения другой, еще не доминирующей потребности, то, вероятно, это событие может переместить вторую потребность на уровень доминирующей, для которой не требуется полномасштабная ФС, поскольку результат уже предопределен и нужно лишь выбрать из памяти и исполнить уже известную программу поведения. Мне представляется что такое поведение справедливо назвать условно-рефлекторным.
А с третьей стороны, вредный результат-сигнал генерируемый локальными рецептивными системами при взаимодействии со средой, или еще неизвестный или не распознанный “угрожающий” сигнал дистанционных рецепторов может вызвать инстинктивную оборонительную реакцию, формируемую в процессе эволюции вида, обеспечивающую живому минимум “выживательных” способностей. Эта реакция соответствует безусловному рефлексу, а в состав усеченной ФС войдут лишь рецепторная и исполнительная подсистемы, актуаторы и их собственные сенсорные системы.
Итак, можно выделить четыре типа поведенческих реакций на раздражения внутреннего и воздействия внешнего миров, вероятно требующих отличных от традиционной архитектуры ФС алгоритмов его формирования:
- Сознательное целенаправленное поведение в незнакомых или малознакомых ситуациях, требующих всех стадий традиционной ФС Подсознательное целенаправленное поведение в хорошо известных ситуациях, не требующих стадий афферентного синтеза и принятия решения – усеченной архитектуры ФС Условно-рефлекторная реакция, стимулируемая сигналами окружающего мира, перемещающая мотивацию на уровень доминирующей для удовлетворения легко достижимой и уже существующей потребности Инстинктивное, не целенаправленное поведение, вовлекающее лишь рецепторные и исполнительные подсистемы организма.
Афферентный синтез –информационное обеспечение
В классическом варианте , на этой стадии формирования целенаправленного поведения участвуют следующие информационные компоненты: доминирующая мотивация, обстановочная афферентация, пусковой стимул и содержимое аппаратов памяти.
Однако, обстановочная афферентация и пусковой стимул показаны как сигналы на входе алгоритма, а память и доминирующая мотивация – как некие внутренние, далеко не очевидные процессы и объекты. И, если с обстановочной афферентацией более или менее все понятно, то не совсем ясно, что такое пусковой стимул, что составляет суть доминирующей мотивации, что содержится в аппаратах памяти, как извлекается и используется эта информация, как взаимодействуют все компоненты афферентного синтеза.
Особый вопрос вызывает функциональная значимость потребности, а также суть учредительной афферентации. Попробуем дополнить существующие представления о стадии афферентного синтеза нашей кибернетической интерпретацией нейрофизиологических процессов, взятых не только в ее классическом описании, но и в расширенном пояснении, представленных в других сопровождающих работах и текстах Анохина.
На рис. 5. приведена блок-схема (архитектура) расширенного алгоритма целенаправленного поведенческого акта.
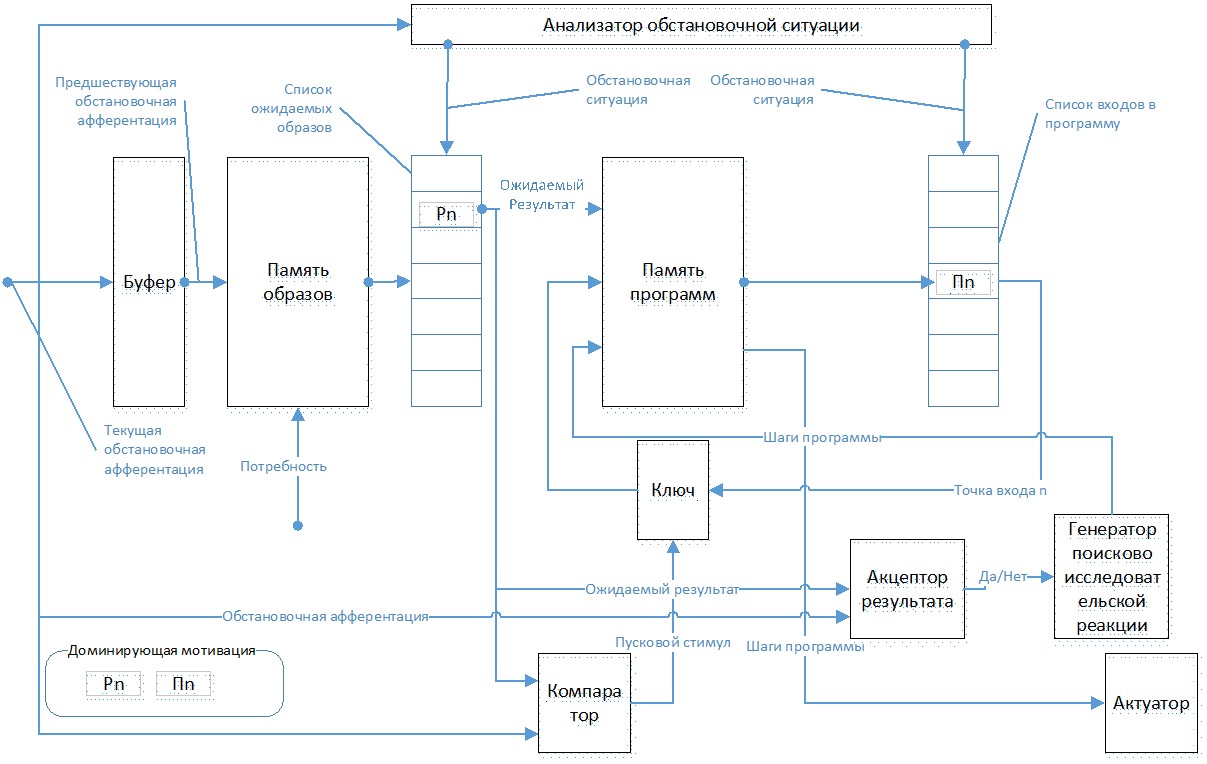
Рис. 5 Дополненная архитектура алгоритма ФС
Мы знаем, что классическая ФС формируется под управлением потребности путем динамического вовлечения систем и подсистем организма, ранее участвующих в удовлетворении этой потребности и как следствие, каждая из которых содержит в аппаратах памяти образы обстановочной афферентации, сопровождающие процесс ее удовлетворения от сигналов возможности вплоть до образа потребного результата. А с учетом формирования содержимого памяти в соответствии с принципом опережающего отражения, любая повторяющаяся обстановочная афферентация предшествующая потребному результату может стать сигналом. И таким образом в составе содержимого аппаратов памяти оказывается пара сигнал-результат. Однако, потребность может быть удовлетворена различными средствами и в аппаратах памяти могут быть уже несколько пар сигнал-результат. Более того, сам сигнал, как биологически значимое событие, может быть потребным промежуточным результатом, о котором может сигнализировать другой, предшествующий ему сигнал, образуя новую сигнал-сигнал пару в памяти.
Например, голод могут удовлетворить колбаса, пицца или котлета по-киевски. Для достижения этих, различных результатов исполняются различные программы поведения: если мы находимся у себя дома, то наиболее доступным результатом будет колбаса в холодильнике и программа поведения сведется к поиску сигналов среды, ведущих к холодильнику. Если мы находимся в пиццерии – пицца, а программой будут сигналы, выдаваемые официанту, ожидание и потребление, но если мы находимся в автомобиле, то, вероятно, котлета по-киевски в ресторане, может быть более достижима, а программа поведения примет более сложный характер навигации по городу, поиск рекламы ресторана, как сигнала, похода в ресторан, заказа, ожидания и, наконец, потребления котлеты.
Представляется, что на внутренний “сигнал” потребности под “именем” “голод” откликаются все, ранее участвующие в ее удовлетворении, подсистемы организма, динамически формирующие ФС.
Из ассоциативных аппаратов памяти предсказателя новой, еще только формируемой из откликнувшихся модулей или подсистем ФС, выбирается список образов возможных результатов и соответствующих сигналов, а из аппаратов памяти исполнителей – список связанных с каждым из них программ достижения. Эти списки фильтруются по критерию достижимости в текущей обстановочной ситуации, до единственной пары наиболее доступного результата и соответствующей программы поведения, стремление достичь который становиться доминирующей мотивацией.
Но что означает “обстановочная ситуация” или в понимании студентов – “учредительная афферентация”?
На наш взгляд, это обобщенная модель среды, ресурсов и состояния организма в данной точке пространственно-временного континуума, ограничивающая или способствующая его действиям при достижении целей – контекст в котором существует и действует организм.
Действующий как фильтр, этот контекст – обстановочная ситуация, ее признаки или характеристики, очевидно, становиться одним из значимых компонентов стадии афферентного синтеза. Например, “внутри, снаружи, в воде, воздухе, в авто, метро, лень, нет денег, сломана нога и т. д.”
Выбранные из памяти пары сигнал-сигнал или сигнал-результат, ожидаемые в обстановочной афферентации, расширяют возможности целенаправленного поиска пути обнаружения и достижения цели – результата, по сигналам окружающей среды, а ассоциативная природа аппаратов памяти, кроме того, позволяет выявлять похожие, подобные результаты и сигналы, что еще больше увеличивает вероятность удовлетворения потребности, однако отбор единственного достижимого варианта ограничивается обстановочной ситуацией – контекстом места, времени, состояния, ресурсов и других возможностей организма. Этот процесс и составляет суть стадии афферентного синтеза
В тоже время, обстановочная афферентация - это непрерывный комплекс возбуждений, интегрируемый рецептивной системой во времени, качестве и пространстве, в котором разыскивается образ потребного результата или сигнала, выбранные из памяти.
При совпадении образа результата, сигнала или их признаков с элементами обстановочной афферентации, генерируется пусковой стимул, запускающий исполнение уже подготовленной (найденной в памяти Исполнителя) программы проведения – целенаправленный поведенческий акт.
С другой стороны, возвращаясь к нашему примеру, вид холодильника (сигнал) может способствовать усилению голода, т. е. напомнить организму о существовании потребности, которую можно удовлетворить прямо сейчас (критерий достижимости и возможный пусковой стимул), и перевести ее в разряд доминирующей, при этом, благодаря ассоциативной природе аппаратов памяти, по доступной части данных на входе (сигнал) из ее хранилища выбирается вся ассоциируемая с ним цепочка данных (потребность, результат, программа поведения). Это работает, расширенная “рефлекторная дуга Павлова” по принципу стимул-память-реакция (СПР) – условный рефлекс.
Другое поведение и, по-видимому, соответствующая ФС, формируется, когда мы слышим рядом взрыв, заставляющий нас мгновенно пригибаться. Это рефлекторное поведение по принципу стимул-реакция (СР) – безусловный рефлекс, очевидно, формирующая совершенно иную архитектуру поведенческого акта, в котором участвуют лишь рецепторная и исполнительная подсистемы.
Как видим, здесь в формировании ФС безусловного рефлекса участвуют компоненты обстановочной афферентации, несущие сигналы окружающего мира, опознаваемые или даже распознаваемые в аппаратах памяти или структурных связях рецепторных систем как крайне вредные, заложенные генетически, стимулирующие инстинктивные реакции, сформированные в процессе эволюции.
Кибернетическая модель сознательного целенаправленного поведения
Под управлением потребности формируется ФС и из ассоциативной памяти Предсказателя выбираются список образов результатов и сигналов, подобных образов, а из памяти Исполнителя – соответствующие, ассоциируемые списки точек входа в программы поведения для их достижения. Под управлением обстановочной ситуации эти списки существенно сокращаются до наиболее вероятных, достижимых, возможных. Путем перебора элементов списка результатов и их сравнения с элементами обстановочной афферентации разыскивается наиболее близкий результат или сигнал. Производится уточненная оценка его достижимости. Этот результат/сигнал и ассоциируемые программы поведения становятся шаблоном будущей программы поведения который уточняется путем моделирования в памяти исполнения одной, наиболее близкой в данной ситуации программы поведения без ее исполнения в реалиях. На каждом шаге моделирования, из памяти предсказателя выбираются промежуточные результаты и сигналы, которые сравниваются с выбранным на этапе 3 результатом. Процесс продолжается до появления результата 3 или его признаков. Если за допустимое число шагов результат не достижим, проверяется следующая в списке программа поведения. Это стадия афферентно-эфферентного синтеза. Если результат достижим, то формируется кэш-память для Акцептора результата/сигнала куда в обратном порядке записываются все шаги пути достижения цели от результата до текущего сигнала и состояния организма. Первый сигнал и шаг выбранной программы поведения, становится шаблоном для его поиска в обстановочной афферентации, что соответствует стадии принятия решения: формирование акцептора результата и программы поведения Если в обстановочной афферентации шаблон обнаружен, то генерируется пусковой стимул, разрешающий реализацию данного шага программы поведения, а из кэш-памяти выбирается следующий шаг программы, ассоциируемый сигнал которого, становиться новым шаблоном для поиска в обстановочной афферентации и генерации нового пускового стимула. Процесс продолжается до появления требуемого результата. Это соответствует стадии исполнения программы поведения. Если, на каком-либо шаге очередной сигнал не обнаружен, то осуществляется поисково-исследовательская реакция - перебором генетически сформированных поведенческих микропрограмм или движений: влево, вправо, повернуть, завернуть и т. п. Если за разумное число попыток, признаков результата/сигнала не обнаружено, то осуществляется новый афферентный синтез начиная с п.2, поскольку обстановочная ситуация уже изменилась. Это процесс поисково-исследовательской реакции. Правильность поисковой реакции оценивается по появлению/исчезновению признаков результата/сигнала: если набор признаков дополняется значит выбранная микропрограмма исполняется в нужном направлении. Оценка признаков осуществляется на каждом шаге программы и управляет вариантами исполнения и модификации программы поведения. Этот процесс соответствует стадии контроля исполнения программы поведения по принципу приближения-удаления от целиЭтому алгоритму соответствует архитектура “аппаратных средств”, блок-схема которой представленная на рис. 6.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
