

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ЗАДАНИЕ 4. Исследование динамики подъёмного механизма
Постановка задачи.
Подъемное устройство состоит из двух колес 1, 2 и поднимаемого тела 3 [4]. Массы тел m1, m2 и m3 соответственно; радиусы больших и малых окружностей колес R1, r1, R2, r2 соответственно для тел 1 и 2 даны в таблице. Для определения моментов инерции тел даны их радиусы инерции ?1 и ?2. (В этом случае моменты инерции тел относительно их осей вращения следует вычислять по формуле Iz= m ?2).
На колесо 1 действует или вращающий момент Мвр или сила Р, значения которых также даны в таблице. Силы сопротивления заданы или в виде пары сил с моментом Мс, или в виде силы Rс, действующей на В тех вариантах, в которых тело скользит по поверхности, следует учитывать и силу трения скольжения. Коэффициент трения f=0,1.
Движение механизма начинается из состояния покоя.
Требования к заданию
Определить грузоподъемность устройства и установить направление движения звеньев механизма под действием заданной нагрузки.
Установить кинематические зависимости между параметрами движения звеньев механизма: скоростями и угловыми скоростями; ускорениями и угловыми ускорениями; линейными и угловыми перемещениями.
Применяя теорему об изменении кинетической энергии механической системы, составить дифференциальное уравнение движения механизма, отнеся его к Проинтегрировать дифференциальное уравнение движения и определить закон движения тела 1, а также зависимость скорости этого тела от времени v1(t).
Определить законы изменения скоростей, ускорений и перемещений всех тел.
Построить график изменения скорости Установить значение его скорости при установившемся движении*. Определить время установления движения tуст..
Используя принцип Даламбера, определить реакции внешних опор, а также силы натяжения всех ветвей тросов (или ремней) и усилий в точках соприкосновения зубчатых колес. Вычислить значения этих сил для моментов времени t1=0 и t2=tуст. Для вариантов, в которых нет установившегося движения, взять t2=3с.
Определить изменение мощности ведущего усилия (Мвр или Р) по времени, вычислить значение мощности для указанных в пункте 6 моментов времени.
Вычислить работу ведущего усилия на перемещении, соответствующем времени t2.
Применяя принцип возможных перемещений, установить каким должно быть усилие, прижимающее тормозную колодку к колесу 2 в точке А, для того чтобы в начальный момент времени t=0 механизм не тронулся с места.
Сделайте выводы.
*Замечание: установившееся движение – это движение с постоянной скоростью.
№ вар | № рис | m1, кг | m2, кг | m3 кг | r1 м | R1 м | r2 м | R2 м | ?1 м | ?2 м | Мвр Нм | Р Н | Rc Н | Мс Нм |
1 | 1 | 300 | 100 | 300 | 0,6 | 0,5 | 0,7 | 0,6 | 1800 | 0 | 34?2 |
1
Мс Мвр
2 1
Rc 3
ПРИМЕР ВЫПОЛНЕНИЯ ЗАА/ДАНИЯ 4.
1. ПОСТАНОВКА ЗАДАЧИ. ИСХОДНЫЕ ДАННЫЕ
Исследуемая механическая система, изображенная на рисунке, состоит из колес 1, 2 и груза 3. На колесо 1 действует сила P = 3500 Н м. На колесо 2 действует момент сил сопротивления Мс = 60?2 Н м, зависящий от угловой скорости тела 2.
В начальный момент времени t = 0 система находилась в покое. Массы тел 1, 2, 3 соответственно равны m1 = 250 кг, m2 = 200 кг, m3 = 500 кг. Радиусы больших и малых окружностей колес R1 = 0,5 м, r1 =0,2м, R2 = 0,4м, r2 = 0,3м.
Радиусы инерции колес 1 и 2 относительно их осей вращения. iz1 =0,4м,
iz2 = 0,3м.
Номер тела приведения - 1.
1
2
15°
О2 О1
Мс Р
3
Рис.1 Схема механизма
2.ОПРЕДЕЛЕНИЕ ГРУЗОПОДЪЕМНОСТИ МЕХАНИЗМА
Требуется провести статический анализ механизма, определить значение массы m3гр, при которой возможно равновесие системы. Найти усилия в тросе, соединяющем колеса 1 и 2 а также в тросе, на котором висит груз 3, определить реакции внешних опор колес. Сравнивая массы m3гр и массу m3, данную в условии, установить направление движения звеньев механизма.
1
2
S1
N2y S2 N1y
N2x m1g N1x
m2g
3
m3g Р
Рис.2 Статическая схема механизма
.
Для решения рассматривается равновесие каждого звена под действием сил, показанных на рисунке. Здесь mg-силы тяжести; Nx ‘, Ny-реакции подшипников; S1 и S2- силы действия и противодействия в тросе, соединяющем звенья 1 и 2. S1=S2.
Уравнения равновесия для звена 1:
? Fix=0 N1x - S1 cos15° =0; (2.1)
? Fiy=0 N1y - m1 g-S1sin15°–P =0; (2.2)
? Mо1(Fi) = 0 - P R1 + S1 r1 =0. (2.3)
Для колеса 2 с грузом 3
? Fix=0, N2x + S2 cos15° = 0; (2.4)
? Fiy=0, N2y – m2 g+ S2sin15° – m3 g =0; (2.5)
? Mo1(Fi) = 0, S2 r2 – m3 g R2 =0. (2.6)
Из (2.3) S2=S1= P R1 / r1=3500•0,5/0,2=8750 H. Тогда из (2.6) m3g=S2 r2 / R2=8750•0,3/0,4=6562,5 Н, отсюда m3гр = 669,643кг.
Определим реакции опор из остальных уравнений. Из (2.1) и(2.2)
N1x=8451,9 Н, N1y= 8207,5 Н, N2x=-8451,5 Н, N2y=4658,5 Н.
В равновесии натяжение троса, на котором висит груз, равно весу груза S3=m3 g =4905 H.
Сравнивая заданную массу m3=500кг массой m3гр, видим, что m3< m3гр, значит сила Р будет поднимать груз 3.
3. КИНЕМАТИКА МЕХАНИЗМА
Требуется установить кинематические зависимости, выразив кинематические параметры тел 2 и 3 через параметры тела 1.
?1 ?1 ?1
??1
?2 ?2
?2
??2
2
а3
v3 1
y3
?y3 3 Рис.3 Кинематическая схема
На рисунке введены обозначения: ?1, ?1, ?1- угловая скорость, угловое ускорение, угловое перемещение тела 1; ?2 ?2 ?2-то же для тела 2; v3, a3, y3- линейная скорость, ускорение и перемещение тела 3.
Движение от тела 1 к телу 2 передается тросом и скорости точек, лежащих на окружностях колес малого радиуса, равны ?1 r1=. ?2 r2, отсюда
?2= ?1 r1 / r2, ?2=2/3 ?1. (3.1)
Касательные ускорения этих точек тоже равны, следовательно r2 ?2= r1 ?1.
?2= r1 ?1 / r2, ?2=2/3 ?1. (3.2)
Равны и линейные перемещения этих точек, r2 ?2= r1 ?1:
?2= r1 ?1 / r2, ?2=2/3 ?1. (3.3)
Груз 3 висит на тросе, который намотан на колесо радиуса R2, поэтому
v3 = R2 ?2, а с учетом (3.1):
v3= ?1 r1 R2 / r2, v3=0,2667 ?1. (3.4)
Ускорение груза 3 равно касательному ускорению точки, которая принадлежит большой окружности колеса 2, a3= ?2 R2. С учетом (3.2):
a3= r1 ?1 R2 / r2, a3=0,2667 ?1. (3.5)
Линейные перемещения груза 3 и точки на окружности радиуса R2 равны
y3= ?1 r1 R2 / r2, y3=0,2667 ?1. (3.6)
Формулы, полученные в этом параграфе, будут использоваться в дальнейших вычислениях.
4. ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ДВИЖЕНИЯ МЕХАНИЗМА
Требуется составить динамическое дифференциальное уравнение движения механизма, приведя его к 1-ому телу, применяя теорему об изменении кинетической энергии системы в дифференциальной форме.
По теореме об изменении кинетической энергии в дифференциальной форме: производная по времени от кинетической энергии механической системы равна сумме мощностей всех сил, действующих на систему
dT/dt= ? NFi. (4.1)
Система состоит из твердых тел, тросы, передающие движение от одного тела к другому нерастяжимые и невесомые, поэтому сумма мощностей всех внутренних сил системы равна нулю.
Вычисление кинетической энергии механизма выполняется с учетом формул, полученных в главе 3. Кинетическая энергия системы равна сумме кинетических энергий всех звеньев, участвующих в движении
Т=Т1+Т2+Т3.
Тела 1 и 2 вращаются вокруг неподвижных осей, поэтому их кинетическая энергия вычисляется по следующим формулам:
Т1=Iz1 ?12 / 2;
Т1=Iz2 ?22 / 2.
Тело 3 движется поступательно, поэтому Т3=m3v32 / 2.
Iz1 - момент инерции тела 1 относительно его оси вращения, он равен Iz1=m1 iz12=15,625кгм2. Iz2- момент инерции тела 2 относительно его оси вращения, он равен Iz2=m2 iz22= 18 кг м2.
С учетом формул (3.1)-(3.6) получается выражение для кинетической энергии
T= m1 iz12 ?12 / 2 + m2(iz2 r1 ?1)2 / 2 r22 + m3(r1 R2 ?1)2 / 2 r22
или T=(m1 iz12+ m2 iz22 r12/ r22+ m3r13 R22 / r22) ?12 / 2;
Т=(250•0,42+200•0,32•0,22 / 0,32+500•0.22•0,42 / 0,32)?12/2;
T=84?12/2. (4.2)
dT/dt=84?1?1.
Для заданной механической системы, состоящей из твердых тел, соединенных нерастяжимыми, невесомыми тросами мощность всех внутренних сил равна нулю, поэтому необходимо вычислить мощность внешних сил.
В общем случае мощность силы определяется формулой N=F v cos?, где F=величина силы, v-скорость точки приложения силы, ? - угол между направлением силы и направлением скорости. Силы тяжести тел 1 и 2, а также реакции опор N1x, N1y, N2x, N2y приложены к неподвижным точкам О1 и О2 поэтому их мощности равны нулю (см. рисунок в гл.4). Мощность силы Р равна
Np=Р R1•?1,
мощность силы тяжести m3g равна
N m3 g = - m3g v3.
Мощность пары сил, действующей на вращающееся тело, вычисляется как взятое со знаком + или – произведение момента пары на угловую скорость тела, поэтому мощность момента сил сопротивления вычисляется по формуле NМс= - Мс ?2
Сумма мощностей всех внешних сил с учетом формул п.3 равна
? NFi= Np+ N m3 g+ NМс= ?1(Р R1-Mc r1/r2-m3g r1 R2/ r2)?1
? NFi =(Р R1-Mc r1/r2-m3g r1 R2/r2)?1. (4.3)
Подстановка заданных величин позволяет вычислить суммарную мощность.
Пример для вариантов(1-60)*:
? NFi = (3500· 0,5-60•(0,2)2/(0,3)2 ?1-500·10·0,2·0,4/0,3) ?1=(416,67-26,67 ?1) ?1;
? NFi =(416,67-26,67 ?1) ?1. (4.4)
Уравнение (12.1) имеет вид
84 ?1=416,67-26,67 ?1.
Дифференциальное уравнение движения имеет вид
![]() + 0,312
+ 0,312![]() =4,987. (4.5)
=4,987. (4.5)
?1
?2
N2y N1y
N2x N1x
Mc P
V3
m3 g
Рис.4 Динамическая схема к вычислению мощностей сил
Замечание: приводимый расчет и составленное дифференциальное уравнение соответствует иар.1-60. Пример расчёта для вариантов 61-100 см. на стр.
5. РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ
Дифференциальное уравнение (4.7) является линейным неоднородным уравнением второго порядка с постоянными коэффициентами. Если разделить его на коэффициент перед старшей производной, то уравнение приобретает вид
![]() +0,312
+0,312![]() =4,987. (5.1)
=4,987. (5.1)
Решение этого уравнения отыскивается в виде ?1= ?общ+ ?част, где ?общ –решение однородного уравнения
![]() +0,312
+0,312![]() =0,
=0,
а ?част - частное решение уравнения (5.1). Для решения однородного уравнения составляется характеристическое уравнение
p2+0, 0312p=0.
Корни характеристического уравнения
р1=0, р2= -0,312.
Решение, соответствующее корням характеристического уравнения, имеет вид
?общ=С1+С2е-9.96t,
где С1 и С2 - константы интегрирования.
Частное решение уравнения (5.1) отыскивается по виду правой части:
?част=А•t.
Константа А определяется после подстановки ?част в уравнение (5.1)
0,312А=4,987, отсюда А=15,984.
Общее решение уравнения (5.1) имеет вид
?1= С1+С2 е - 0,312t+15,984•t. (5.2)
Константы С1 и С2 определяются из начальных условий: при t=0 ?1=0 и ?1=0. Вычислим угловую скорость, взяв производную
?1=d ?1/dt=C2(-0,312) е - 0,312t+15,984.
Выполнение начальных условий дает два алгебраических уравнения:
С1+С2=0, C2(-0,312)+ 15,984=0. Из этих уравнений С2=-С1=51,23.
Окончательно решение уравнения (5.1) имеет вид
?1= 51,23(-1+ е - 0,312t)+15,984•t; (5.3)
?1=15,984(1- е - 0,312t) . (5.4)
6.ЗАКОНЫ ДВИЖЕНИЯ ВСЕХ ТЕЛ МЕХАНИЗМА, ФОРМУЛЫ СКОРОСТЕЙ
И УСКОРЕНИЙ ЭТИХ ТЕЛ В ЗАВИСИМОСТИ ОТ ВРЕМЕНИ
В предыдущем параграфе формула
?1= 51,23(-1+ е - 0,312t)+15,984•t (6.1)
определяет закон движения тела 1, а формула
?1=15,984(1- е - 0,312t) с-1 (6.2)
дает закон изменения угловой скорости тела 1 по времени.
Продифференцируем правую и левую части последнего равенства и определим угловое ускорение колеса 1
?1=4,987 е - 0,312t с-2. (6.3)
Воспользовавшись кинематическими зависимостями (3.1-3.3), получим закон движения тела 2 и формулы ?2= ?2(t) и ?2= ?2(t):
?2=34,153(-1+ е - 0,312t)+10,656t; (6.4)
?2=10.656 (1- е - 0,312t) с-1; (6.5)
?2= 3,325 е - 0,312t с-2. (6.6)
С помощью формул (3.4-3.6) получим законы изменения параметров движения тела 3:
y3=(17,0765(-1+ е - 0,312t)+5,328•t)), м; (6.7)
v3=5,328(1- е - 0,312t)), м/с; (6.8)
a3= 1,662 е - 0,312t, м/с2. (6.9)
7. ГРАФИК ИЗМЕНЕНИЯ УГЛОВОЙ СКОРОСТИ ?1 И УСКОРЕНИЯ ?1.
Требуется с помощью уравнений, полученных в п.6, построить графики угловой скорости, ускорения и перемещения колеса 1 по формулам из п.7 и по ним определить характеристики установившегося движения.
Для построения графиков воспользуемся программой Miсrosoft Excel.
На рисунке видно, что при t>?, ?1>0 а ?1>15 ,984 с –1. Отсюда можно сделать вывод, что примерно через 15 с после начала разгона механизма из состояния покоя его движение «устанавливается» и все звенья продолжают двигаться с постоянными скоростями.
Таким образом, время установления движения
tуст=15 c.
Параметры установившегося движения: ?1=15,984 с-1, ?2=10.656 с-1, v3=5,328м/с.
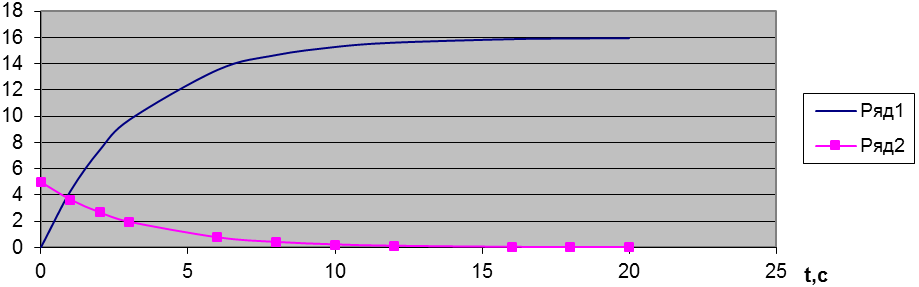
Угловая скорость(? 1/c-ряд1) и ускорение (?1/с-2 –ряд2) тела 1
8. ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ РЕАКЦИЙ ОПОР
Требуется вычислить реакции внешних опор колес 1 и 2, а также силы натяжения всех ветвей тросов.
Для определения сил реакций опор и силы натяжения троса между телами 1 и 2 воспользуемся уравнениями, выражающими принцип Даламбера.
Согласно принципу Даламбера, если в данный момент времени ко всем действующим на механическую систему силам присоединить силы инерции Даламбера, то получившаяся система сил будет эквивалентна нулю и для неё выполняются уравнения статики.
Нужно изобразить активные силы и реакции внешних опор так же, как в пп. 2 и к ним добавить момент пары сопротивления Мс.
Силы инерции вращающихся тел 1 и 2 приводятся к парам сил с соответствующими моментами М1Ф=-Iz1?1 , М2Ф=-Iz2?2. Знак минус в этих формулах указывает на то, что моменты и угловые ускорения противоположны по направлениям. Iz1=m1?12 и Iz2= m2?22 - моменты инерции колес относительно их осей вращения. Сила инерции тела 3, которое движется поступательно, равна ![]() . Все силы и моменты изображены на рисунке.
. Все силы и моменты изображены на рисунке.
Составим уравнения, выражающие принцип Даламбера, для каждого тела в отдельности. При этом учтём силы натяжения троса, который передаёт движение от первого тела ко второму. Это внутренние силы S1 и S2,, по
3-му закону Ньютона они равны по величине и противоположны по направлению.
Система сил, действующих на тело 1, плоская, поэтому следует составить три уравнения. Сумма проекций всех сил на ось x равна 0
? Fix=0, N1x – S1 cos15° =0. (8.1)
Сумма проекций всех сил на ось y равна 0
? Fiy=0, N1y –m1g - S1 sin15° =0. (8.2)
Сумма моментов всех сил относительно точки О1 равна 0
? Mо1(Fi) = 0, - P R1 + S1 r1+ М1Ф =0. (8.3)
Аналогично составляются уравнения для сил, действующих на тело 2.
? Fix=0, N2x + S2 cos15° = 0; (8.4)
? Fiy=0, N2y – m2 g+ S2sin15° – m3 g –Ф3 =0; (8.5)
? Mo1(Fi) = 0, S2 r2 – m3 g R2 - Ф3 R2- Мс. - М2Ф =0. (8.6)
Из уравнения (8.3) определим S1
S1= (P R1 - М1Ф)• 1/ r1=(P R1- Iz1?1)• 1/ r1.
М1Ф 1
М2Ф
S2
N2y S1 15? N1y
N2x N1x
m2g m1g P
v3 Мс
3
Ф3
Рис.5 Динамическая схема.
. Подставляя значения всех величин и используя формулу (6.3) для углового ускорения ?1, получим значение силы натяжения троса между колесами 1 и 2 в виде функции от времени.
S1=(1750-199,48 е - 0,312t)Н. (8.7)
Для оценки максимального значения, рассмотрим функцию е - 0,312t. При t=0 эта функция рана 1, а если t>?, то функция е - 0,312t >0. Отсюда можно сделать вывод, что сила S1 имеет максимальное значение при установившемся движении: S1max=1750 Н.
Из уравнений (8.1) и (8.2) найдем реакции неподвижной шарнирной опоры N1x и N1y, а из (8.4) и (8,5) найдем N2x и N2y.
N1x= S1 cos15° ; N1y= m1g+S1 sin15°;
N1x=(1690,37-192,68 е - 0,312t)Н; (8.2)
N1y=(2952,93-51,6 е - 0,312t)Н. (8.3)
Максимальные значения сил: N1xmax=1690,37Н; N1y=2952,93Н.
Аналогично
N2x=- S1 cos15°; N2y =+ m2 g - S2sin15° + m3 g +Ф3;
N2x=-(1690,37-192,68 е - 0,312t)Н; (8.3)
N2y=( 6547, 067+784,7 е - 0,312t)Н. (8.4)
Максимальные значения сил: N1xmax=1690,37Н; N1ymax=2952,93Н; N2xmax=1690,37Н при установившемся движении.
Сила N2y имеет максимальное значение в момент времени t=0, когда механизм трогается с места. N2ymax=7331, 177Н.
Для определения силы натяжения троса, на котором висит груз 3, применим принцип Даламбера к грузу.
y S3 Векторная сумма всех сил, действующих на тело 1,
3 включая силу инерции Даламбера, равна 0. В проекции
m3g на ось y будем иметь
Ф3 S3- m3g - Ф3 =0; S3= m3g+ Ф3 .
Кинетостатика
груза 3
Подставляя известные значения, получим
S3=(5000+831 е - 0,312t)Н.
Максимальное значение эта сила имеет в момент времени t=0
S3max=5831Н.
9. МОЩНОСТИ ВЕДУЩЕГО УСИЛИЯ
Ведущим усилием для рассматриваемого механизма является сила Р. Мощность силы Р вычисляется по формуле NP=Pv cos0?, где v-скорость точки приложения силы Р, 0?-угол между направлением силы и скорости. Используя формулу (6.2), получим
V=?1?R1= 15,984(1- е - 0,312t)0,5=7,992(1- е - 0,312t)м/с;
NP=27972(1- е - 0,312t)Вт.
Максимальное значение мощность ведущего усилия имеет при установившемся движении NPmax=27,972кВт.
10. РАБОТА СИЛЫ Р НА ПЕРЕМЕЩЕНИИ, СООТВЕТСТВУЮЩЕМ tуст
Работа силы, приложенной к вращающемуся телу, вычисляется по формуле
АР=![]()
 ,
,
где МZ(P) - момент силы Р относительно оси вращения тела 1.
В нашем случае момент силы Р относительно оси вращения постоянен и равен Мz1=Р?R1=1750 Нм, поэтому работу силы Р следует вычислять по формуле
АР=Р?R1 ?1.
Знак + выбран потому, что направление момента силы Р и направление вращения колеса 1 совпадают. Вычислим значение угла поворота ?1для момента времени, за которое движение механизма устанавливается tуст=15 c, по формуле (5.3)
?1(15)= 51,23(-1+ е - 0,312?15)+15,984?15 =29,165рад.
Искомое значение работы:
АР=1750?29,165=51039Дж=51,039кДж.
10.ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ.
Требуется, применяя принцип возможных перемещений, определить при каком значении силы давления Q на тормозную колодку в начальный момент времени t=0 механизм не тронелся с места, если колодка действует на колесо 2 в точке А.
Согласно принципу возможных перемещений для равновесия механической системы с идеальными связями, необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю.[1]
? ?Ак=0.
Определим предельное значение силы, которая будет удерживать механизм в равновесии при заданных массах звеньев. Сопротивление, зависящее от скорости в этом случае равно 0.
На рисунке 2 изображены активные силы, действующие на механизм. Это сила Р, силы тяжести звеньев и груза 3. Действие силы Q на колодку передаётся на колесо 2 в точке А через силу давления N и силу трения Fтр. В случае равновесия механизма, возможные перемещения звеньев механизма будут соответственно ??1,??2 и ?y3.
Рассматриваемая механическая система имеет одну степень свободы, связи, наложенные на систему, являются стационарными и голономными, поэтому зависимости между возможными перемещениями такие же, как между действительными перемещениями, определенными формулами (3.3), (3.6), (3.9).
??2= r1/r2 ??1;
?y3= r1 R2/r2 ??1.
Дадим механизму возможное перемещение и вычислим возможную работу активных сил.
? ?Ак = ?АР+ ?АFтр+ ?Аm1g;
? ?Ак =РR1 ??1-m3g ?y3 –FтрR2??2=0;
? ?Ак =Р R1 ??1 - m3g r1 R2/r2 ??1-fQ R2 r1/r2 ??1=0;
Р R1 - m3g r1 R2/r2- fQ R2 r1/r2 =0.
Получаем значение искомой силы
Q =  =1562,3Н
=1562,3Н
При значении силы Q=1562,3Н механизм не тронется с места.
1
2
3
Рис.6 .
ВЫВОДЫ.
Методами статики исследовано состояние равновесия подъемного механизма и установлена грузоподъемность, реакции внешних опор и сил натяжения тросов при максимальной нагрузке.
Исследована кинематика механизма и установлены зависимости между параметрами движения его звеньев.
С помощью теоремы об изменении кинетической энергии в дифференциальной форме получено дифференциальное уравнение движения механической системы, после интегрирования которого, установлены законы движения всех тел и получены формулы изменения их скоростей и ускорений.
Для определения сил натяжения тросов и реакций связей при движения механической системы был применен принцип Даламбера.
Построены графики изменения параметров движения По графику угловой скорости видно, что через некоторое время угловая скорость колеса 1 становится постоянной и равной ?1уст=15,984с-1, это значит, что движение устанавливается, и все тела движутся равномерно. Время установления tуст= 15 c.
Определены силы натяжения тросов. Установлены законы изменения значений этих сил и определены их максимальные значения. Вычислены реакции внешних связей и их максимальные значения.
Установлена зависимость мощности ведущего усилия Р от времени и определено её максимальное значение Nрмах=10,474кВт. Определена работа ведущего усилия на перемещении, соответствующем времени установления движения.
Принцип возможных перемещений применен для определения тормозящего усилия Q, необходимого для удержания механизма в равновесии.
Таким образом, методами теоретической механики исследована статика, кинематика и динамика подъёмного механизма.
