
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
![]() (7)
(7)
Данные равенства верны, так как мы считаем, что у нас нет погрешности, и все прямые выходящие под определенным углом из роутеров пересекутся в одной точке, где находится объект, регистрация движения которого происходит. Исходя из равенства (10) составим систему уравнений:
![]()
![]()
![]()
![]()
![]()
![]()
Также добавим к данной системе уравнений систему уравнений, составленных из основного тригонометрического равенства:
![]() (8)
(8)
где i = 1,2,3.
Векторы на которых лежат точки (a1,b1), (a2,b2), (a3,b3), являются направляющими, и они определяют угол, который можно наглядно представить при помощи тригонометрического круга. Допустим, роутер находится в начале координат, а прямая с длинной d, выходящая из начала координат под углом б, тогда направляющий вектор лежит на этой прямой. Применим основное тригонометрическое тождество: ![]() где
где ![]() координаты x и y направляющего вектора, и получим
координаты x и y направляющего вектора, и получим ![]()
Извлечем корень из обеих частей уравнения:
![]() (9)
(9)
Аналогично для роутеров, находящихся в точках (X2,Y2) и (X3,Y3). Таким образом, становится понятно, откуда в системе появляются уравнения (8). Остается только решить данную систему уравнений, решением будут являться пары чисел a и b, из получившихся пар выбираем подходящие для наших условий. Таким образом, у нас будут известны координаты направляющих для каждого роутера векторов, а также координаты точки, в которой находится объект наблюдения.
РЕАЛИЗАЦИЯ АЛГОРИТМА ПОЗИЦИОНИРОВАНИЯДля реализации был выбран первый алгоритм, основанный на пересечении окружностей, так как этот алгоритм достаточен для эффективного определения местоположения. Средой разработки для реализации модели мною была выбрана Unity, так как в ней очень широкий спектр возможностей для работы с графикой, на языке С#. При запуске программы открывается окно с загруженным планом помещения и объектом на нем. Снизу слева мы видим координаты объекта реальные и рядом видим координаты объекта, рассчитанные посредством разработанной математической модели. Сразу можно обратить внимание на то, то координаты разнятся между собой, это возникает вследствие погрешности в расчетах, так как для создания модели использовались практически полученные данные.
Также можно видеть расстояние от каждого роутера до объекта наблюдения и уровень сигнала, доходящего до объекта, от каждого роутера. Передвижение объекта на плане слева экрана осуществляется при помощи стрелок клавиатуры, а справа мы видим, как определяется его местоположения при помощи расчетов и можем наглядно увидеть погрешность в позиционировании. Объект справа находится в области пересечения окружностей, соответствующих определенному уровню сигнала.
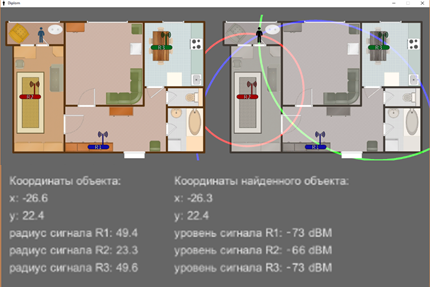
Рис. 4. Определение местоположения объекта в программе
ЗАКЛЮЧЕНИЕ
При выборе алгоритма позиционирования необходимо найти оптимальное решение согласно критериям: стоимости, точности определения координат и сложности реализации. Исходя из этого, был выбран метод триангуляционного позиционирования. Анализ заключался в получении объективных показателей угасания Wi-Fi сигналов при работе в закрытом помещении, и прохождении им инженерных конструкций.
Была выбрана математическая модель, способной описать способ позиционирования в Wi-Fi сетях. Для ее создания применялась приемы аналитической геометрии. В результате было два алгоритма позиционирования, отличающиеся между собой сложностью и точностью реализации, и областью допустимых значений. Один из получившихся методов был реализован на языке программирования C#.
Данная модель способна обеспечивать позиционирование сотрудников и материальных активов на предприятии с определенной точностью, её можно применять как систему охраны или контроля и управления доступом. Совместно с системами охраны рекомендуется применять комплекс мероприятий по защите объектов [16].
СПИСОК ЛИТЕРАТУРЫ
Le Dortz N., Gain F., Zetterberg P. Wifi Fingerprint Indoor Positioning System Using Probability Distribution Comparison // 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (Icassp). ‒ 2012. ‒ pp. 2301-2304. Метод определения координат мобильных устройств по радиосигналу Wi-Fi точек // «Научно-технический вестник информационных технологий, механики и оптики». – 2007, № 000-1494. – С. 40-43. , Оценка расстояния между двумя устройствами, соединёнными через Wi-Fi // Телекоммуникации и информационные технологии – 2016. - №1-2016 – С. 101-103. , Радиолокация с использованием Wi-Fi точек доступа беспроводных сетей внутри помещений // «Информационно – измерительные и управляющие системы». – 2012, №7. – С. 29 – 36. Анализ подходов к позиционированию внутри помещений с использованием трилатерации сигналов Wi-Fi // «Труды СПИИРАН». 2014, №5. – C. 206-214. Lassabe F., Canalda P., Chatonnay P., Spies F. Indoor Wi-Fi positioning: techniques and systems // Annales Des Telecommunications-Annals of Telecommunications. ‒ 2009. ‒ T. 64, № 9-10. ‒ pp. 651-664. , . Алгоритмы построения и анализа триангуляции. – Томск: Изд - во Том. ун-та, 2006. – 168 с. Svetoslav Genchev, Cooperative Localization by Time-Of-Flight Trilateration – Fast, Robust or Optimal, Journal of Information Technologies and Control, Vol. 2/2008, ISSN: 1312 – 2622. - pp. 29-39. Методы определения координат сотрудников и техники предприятия с использованием технологии Wi-Fi // «Техника радиосвязи». – 2015, № 000-8693. – С. 67 – 77. Системы позиционирования и мониторинга // «Технологии и средства связи». – 2014.– № 2. – С. 18–22. Беспроводные сети передачи данных / , . – М.: Вузовская книга, 2013. – 104 c. HaykinS. Neural Networks and Learning Machines – 2008. –P. 936 Беспроводные сети WI-FI. – М.: Интернет – университет информационных технологий, Бином. Лаборатория знаний, 2013. – 216 c. , , Позиционирование в сетях Wi-Fi // «Вестник связи». – 2010. – №11. – С. 28 – 33. Автономный искусственный интеллект. – М.: БИНОМ. Лаборатория знаний, 2012. – 362 с. Reva I. L., Kashirin I. A., Zaharov K. V. Development of optical transceivers sff standard with support for cryptographic kernel [13th international scientific technical conference on actual problems of electronic instrument engineering (APEIE - 2016)] Proceedings: in 12 volumes, 2016. – pp. 159-162.Application of points of access of Wi-fi for registration of movement on the object*
During work a series of experiences at the enterprise for measurements of level of a signal at different distances from a source for definition of the general tendency of fading of a signal has been carried out. After obtaining empirical data the analysis of compliance of real indications to the values calculated by a formula has been carried out and conclusions are drawn. Also fading of Wi-fi of a signal when passing of engineering designs by him from different materials with a different density and thickness has been considered.
On the basis of experimentally obtained data the model describing movement of an object indoors in which it is under the influence of three routers in each point of space has been developed. This model has allowed to visualize results of the work which is carried out during performance of final qualification work in the program in the C# programming language.
In work 6 ways of positioning in Wi-Fi networks are considered. On information collected about each of them, the analysis of these ways which purpose is the argumentativeness of use of each of these methods depending on a set of factors is carried out: prices, accuracy of positioning, complexity of expansion and others. As there is a theoretical dependence of the Wi-fi level of a signal from distance to a source, the decision practically to make sure of the accuracy of this formula has been made, having made a series of experiments and having provided the analytics of results directed to tracing a tendency of fading of Wi-fi of a signal both in open space, and in the room having barriers in the form of engineering designs from the different materials most of which often are found presently. The choice of one of 6 ways of positioning which modeling has been carried out within this work became result analytical actions.
Consideration of algorithms of positioning which, having finished, it is possible to use, knowing the signal Wi-fi level on an object becomes the following stage, after obtaining results on a step of the analysis of data. In work two theoretical algorithms and two mathematical models capable to carry out positioning on the basis of the data obtained experimentally are presented. The first – the algorithm of triangularly positioning based on crossing of circles which radiuses is the signal level indicator on subject to observation. The second - the algorithm of triangularly positioning based on the directing vectors originating from sources of a signal and which are crossed in a point of the alleged location of a subject to observation. On the basis of all considered data for realization in work the first algorithm of positioning has been chosen.
Keywords: positioning, wi-fi of network, triangulation, angulation, mathematical model, analysis of data, neural network, tag wi-fi.
REFERENCES
Le Dortz N., Gain F., Zetterberg P. Wifi Fingerprint Indoor Positioning System Using Probability Distribution Comparison. 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (Icassp), 2012, pp. leymanov D. F. Metod opredelenija koordinat mobil'nyh ustrojstv po radiosignalu Wi-Fi tochek [A method of determination of coordinates of mobile devices on a radio signal of Wi-fi of points]. Nauchno-tehnicheskij vestnik informacionnyh tehnologij, mehaniki i optiki, 2007, no. 2226-1494, pp. 40-43. Novikov A. M., Volkov M. M. Ocenka rasstojanija mezhdu dvumja ustrojstvami, soedinjonnymi cherez Wi-Fi [Distance assessment between two devices connected through Wi-Fi]. Telekommunikacii i informacionnye tehnologii, 2016, no. 1-2016, pp. 101-103. Alexandrov D. V., Saleh H. M. Radiolokacija s ispol'zovaniem Wi-Fi tochek dostupa besprovodnyh setej vnutri pomeshhenij [Radiolokation with use of Wi-fi of points of access of wireless networks in rooms]. Informacionno – izmeritel'nye i upravljajushhie sistemy, 2012, no. 7, pp. 29 – 36. Shchekotov M. S. Analiz podhodov k pozicionirovaniju vnutri pomeshhenij s ispol'zovaniem trilateracii signalov Wi-Fi [The analysis of approaches to positioning in rooms with use of trilateration of signals of Wi-fi]. Trudy SPIIRAN, 2014, no. 5, pp. 206-214. Lassabe F., Canalda P., Chatonnay P., Spies F. Indoor Wi-Fi positioning: techniques and systems. Annales Des Telecommunications-Annals of Telecommunications, 2009. vol. 64, no. 9-10, pp. 651-664. A. V. Skvortsov, N. S. Mirza. Algoritmy postroenija i analiza trianguljacii [Algorithms of construction and analysis of a triangulation]. Tomsk, Publ. house Tomsk univ-ty, 2006, P. 168. Svetoslav Genchev. Cooperative Localization by Time-Of-Flight Trilateration – Fast, Robust or Optimal, Journal of Information Technologies and Control, vol. 2/2008, ISSN: 1312 – 2622, pp. 29-39. Dudyak E. V. Metody opredelenija koordinat sotrudnikov i tehniki predprijatija s ispol'zovaniem tehnologii Wi-Fi [Methods of determination of coordinates of employees and the equipment of the enterprise with use of Wi-fi]. Tehnika radiosvjazi, 2015, no. 2075-8693, pp. 67 – 77. Ovchinnikov S. V. Sistemy pozicionirovanija i monitoringa [Systems of positioning and monitoring]. Tehnologii i sredstva svjazi, 2014, no. 2, pp. 18-22. Choubin V. I. Besprovodnye seti peredachi dannyh [Wireless networks of data transfer]. – V. I. Choubin, O. S. Krasilnikova. Moscow, High school book, 2013, P. 104. Haykin S. Neural Networks and Learning Machines, 2008, P. 936 Besprovodnye seti WI-FI [Wireless networks WI-FI]. Moscow, The Internet – the university of information technologies, Bing. Laboratory of knowledge, 2013, P. 216. Volkov A. N., Sivers M. A., Sukhov V. A. Pozicionirovanie v setjah Wi-Fi [Positioning in Wi-fi]. Vestnik svjazi, 2010, no. 11, pp. 28 – 33. Zhdanov A. A. Avtonomnyj iskusstvennyj intellekt [Autonomous artificial intelligence. Moscow], BINOMIAL. Laboratory of knowledge, 2012, P. 362. Reva I. L., Kashirin I. A., Zaharov K. V. Development of optical transceivers sff standard with support for cryptographic kernel. [13th international scientific technical conference on actual problems of electronic instrument engineering (APEIE - 2016)] Proceedings: in 12 volumes, 2016, pp. 159-162.
*Статья получена 21 сентября 2017 г.
*Received 21 September 2017.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
