
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ ГОРОДА МОСКВЫ
СЕВЕРНОЕ ОКРУЖНОЕ УПРАВЛЕНИЕ ОБРАЗОВАНИЯ
Определение центра тяжести пластины с помощью тензодатчиков

Проект по физике учеников 10 «А» класса
ГБОУ Лицея № 000 Голубева Александра, Власова Андрея
Руководители: ,
Москва, 2015-2016
Аннотация
Тема: Определение центра тяжести пластины с помощью тензодатчиков
Авторы работы: Голубев Александр, Власов Андрей
Научный руководитель: , учитель физики в лицее 1575
Актуальность темы: Для решения современных логистических проблем необходима установка, которая с точностью измеряет центр тяжести грузов.
Проблема: На современном рынке очень мало таких моделей, которые позволяют с точностью и быстротой находить центр тяжести грузов, при этом имея невысокую цену.
Цель: Создать модель, которая, которая с точностью измеряет центр тяжести грузов.
Преимущества: Модель позволяет быстро и с точностью находить центр тяжести тела, имея невысокую стоимость.
План выполнения работы:
Этап: a) Определить проблему, цель задачи проекта;б) Подобрать и изучить необходимую литературу;
в) Систематизировать информацию.
Этап: a) Сделать чертежи установки;б) Собрать установку;
в) Запрограммировать плату.
Этап: Протестировать установку.Краткое описание работы.
Работа представляет собой научно-технический проект, результатом которого является создание установки. Создана установка, которая позволяет с точностью и быстротой определять центр масс тела. Модель нашей установки уменьшает время, которое затрачивается при сортировке грузов.
Содержание:
Введение
Основная часть
Заключение
Библиография:
1) , , Логистика
2) Теоретическая механика. Динамика. Практикум. 2010г.
Введение
Логистика — наука, предмет которой заключается в организации рационального процесса продвижения товаров и услуг от поставщиков сырья к потребителям, функционирования сферы обращения продукции, товаров, услуг, управления товарными запасами и провиантом, создания инфраструктуры товародвижения.
Она решает такие проблемы, как:
выбор вида транспортного средства; определение маршрутов; организация транспортировки груза; упаковка товаров в контейнеры; управление запасами; хранение на складских площадях; маркировка; формирование сборных заказов; таможенные услуги.Принцип работы установки.
Под панелью установлены 4 тензо-датчика, способные измерять давление до 10 КПа, которые передают информацию на плату Arduino UNO, происходит расчет по формуле и находится координаты центра масс тела, далее плата передает координаты, на шаговые двигатели Solidoodle SM35HT, указывающие на центр масс, посредствам лазера.


Принцип работы измеряющего компонента установки:

Конструктивно прибор представляет собой тензорезистор с контактным элементом. Он закреплен на верхней панели устройства, которая соприкасается с измеряемым телом. Принцип работы тензодатчика основан на воздействии на чувствительный элемент определенной детали. Для включения датчика в сеть применяется специальные электрические отводы, которые подключаются к чувствительной пластине. Благодаря этому в контактном элементе наблюдается постоянное напряжение. Но, при работе датчика на специальную подложку устанавливается деталь. Её вес разрывает цепь и образовывается механическая деформация, которая при помощи контрольных контактов преобразуется в электрический сигнал.
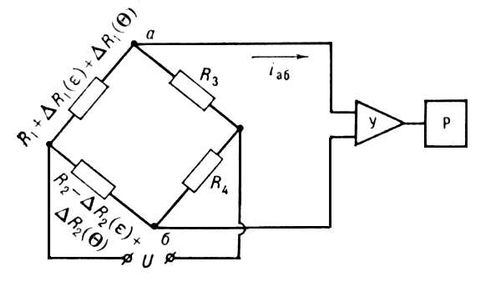
Схема подключения:
Мостовая схема подключения тензометрического датчика основана на законе Ома, при котором если все сопротивления имеют равное значение, то ток, проходящий через резисторы, также будет иметь одинаковое значение.
Вычислительная часть установки:
За преобразование сигнала переданного тензодатчиками в установки отвечает плата Arduino UNO, она производит расчет по приведенным ниже формуле:
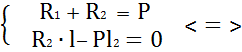
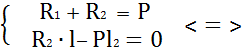
Где R1 и R2 – сопротивления, показания тензодатчиков.
l - длина установки.
L1 и L2 – длины рычагов, расстояния от тензодатчиков до тела.
P-вес тела.
Программа вычисления центра масс была написана в среде программирования Arduino.
После нахождения центра масс тела, плата посылает электрический сигнал на драйвер электромотора, который в свою очередь вычисляет количество оборотов, которое нужно совершить мотору, чтобы указать координату центра масс.
Далее сигнал от драйвера передается шаговым двигателям, которые двигаясь по направляющим, при помощи каретки и лазерной указки указывают на точку, которая является центром массы тела.
В итоге удалось достичь следующих результатов: расчет по формуле и нахождение центра масс происходит почти мгновенно, установка с точностью до 3 мм определяет нахождение центра масс(было проведено несколько опытов доказывающих это), цена установки осталась в намеченных пределах.
Практическая часть.
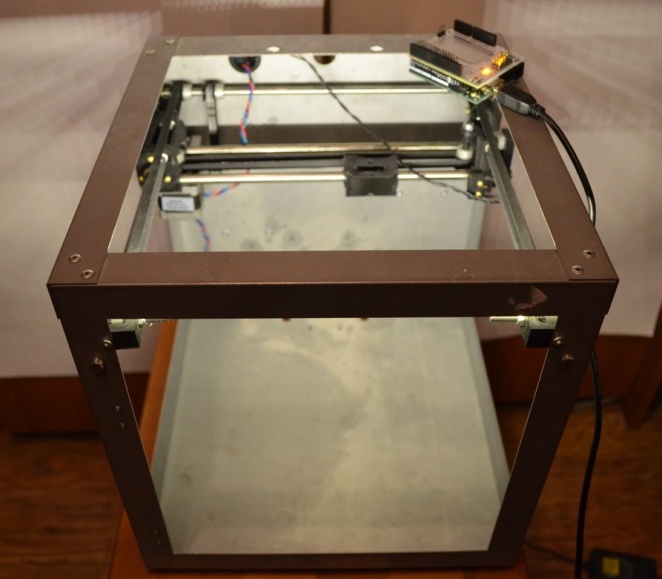
Для воплощения нашего проекта в реальность мы решили воспользоваться Arduino UNO, шаговыми моторами Solidoodle SM35HT, тензо-датчиками, и каркасом, собранным самостоятельно.
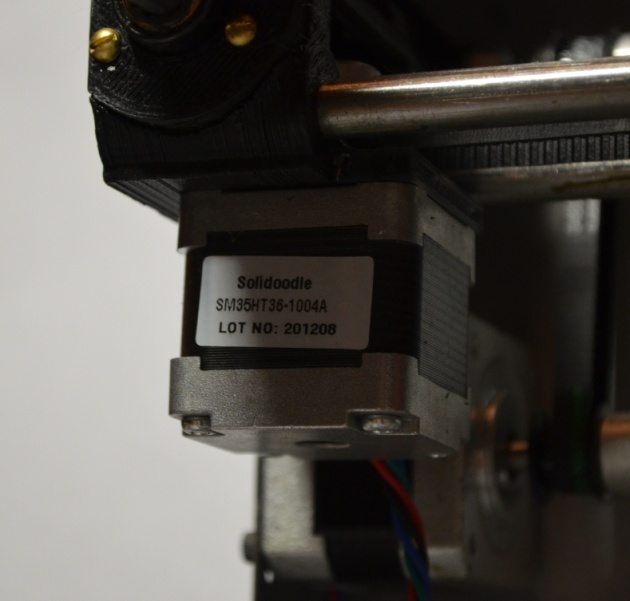

*на фотографиях показан шаговый двигатель и направляющие
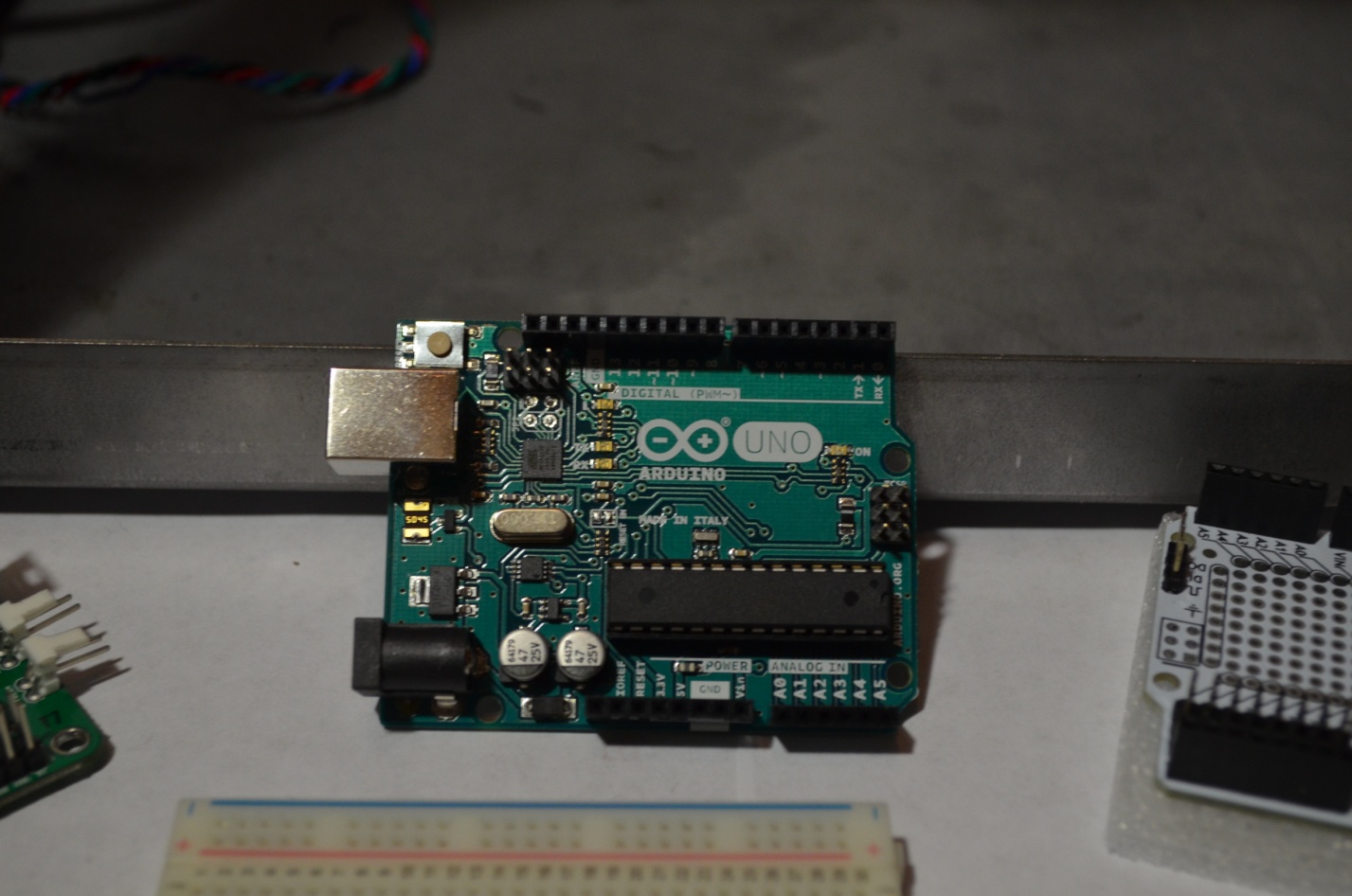
*на фотографии показана плата Arduino UNO
Заключение
Создана модель установки, позволяющая с быстротой и высокой точностью находить центр тяжести тела. Модель установки позволяет уменьшить время и средства, затрачиваемые при сортировке грузов.
