
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тема работы: Электронные Ботинки для Слабовидящих и незрячих Людей или ЭБСЛ 2 (с функцией слежения и определения местоположения).
Цель работы: создать Электронные Ботинки для Слабовидящих и незрячих Людей, оснащенные датчиками определения расстояния и GPS - тракером, позволяющим определять местонахождение человека.
Задачи работы:
- спроектировать и собрать ЭБСЛ2, используя плату Arduino и радиотехнические детали, GPS - тракер; запрограммировать ЭБСЛ2 и настроить программу слежения Simotracking в части местонахождения незрячего человека, а в случае выхода его за заданный периметр, информировать родственников смс сообщением об этом; провести экспериментальные запуски; исправить выявленные недочёты.
Актуальность: ЭБСЛ-2 является полезным гаджетом для незрячих и слабовидящих людей, который позволяет облегчить передвижение по оживленному городу, помогает людям, недавно потерявшим зрение, пройти период адаптации, а родственникам видеть местонахождение незрячего человека и в случае его выхода за заданный периметр уведомить их об этом с помощью смс.
Arduino — торговая марка аппаратно-программных средств для построения простых систем автоматики и робототехники. Аппаратная часть представляет собой набор смонтированных печатных плат. Полностью открытая архитектура системы позволяет свободно копировать или дополнять линейку продукции Arduino.
1.2. Обзор среды программирования
Язык программирования Arduino является стандартным C++ с некоторыми особенностями, облегчающими новичкам написание первой работающей программы.
Программы, написанные программистом Arduino называются наброски и сохраняются в файлах с расширением ino. Так же существует возможность создавать и подключать к проекту стандартные файлы C++.
Модуль Arduino nanoПлатформа Nano, построенная на микроконтроллере ATmega328 (Arduino Nano 3.0), имеет небольшие размеры и может использоваться в лабораторных работах.
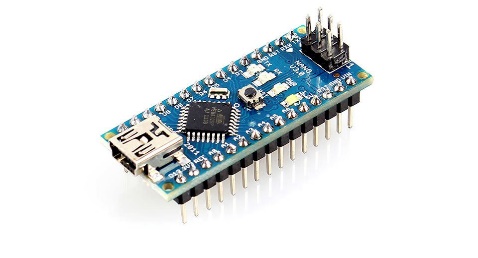
Рис.1. Платформа Nano
Краткие характеристики
Табл.1 краткая характеристика микроконтроллера
№ | Микроконтроллер ATmega328 | |
1 | Рабочее напряжение | 5 В |
2 | Входное напряжение (рекомендуемое) | 7-12 В |
3 | Входное напряжение (предельное) | 6-20 В |
4 | Цифровые Входы/Выходы | 14 |
5 | Постоянный ток через вход/выход | 40 мА |
6 | Флеш-память | 16 Кб при этом 2 Кб используются для загрузчика |
7 | Размеры | 1.85 см x 4.2 см |
1.4. Краткое сравнение Arduino Nano и Arduino Uno
Почему же для сборки ЭБСЛ2 была выбрана именно плата Arduino Nano, ведь самой популярной платой является Arduino Uno? Под задачи данной работы - сборки ЭБСЛ2, удобнее использовать nano, потому что она значительно меньше в размере, а значит компактнее и удобнее для размещения в подошве ботинка.
2. Характеристика робота ЭБСЛ2: создание, среда программирование и запуск
2.1. Моторы, датчики
Ультразвуковой датчик HC-SR04 используя ультразвуковые волны измеряет расстояние до объекта или просто обнаруживает препятствие на пути движения подвижной конструкции. В отличие от инфракрасных дальномеров на ультразвуковой датчик HC-SR04 не влияют источники света или цвет препятствия. Типичными областями применения являются парковочные датчики, контроллеры уровня, устройства мониторинга местности и другие.
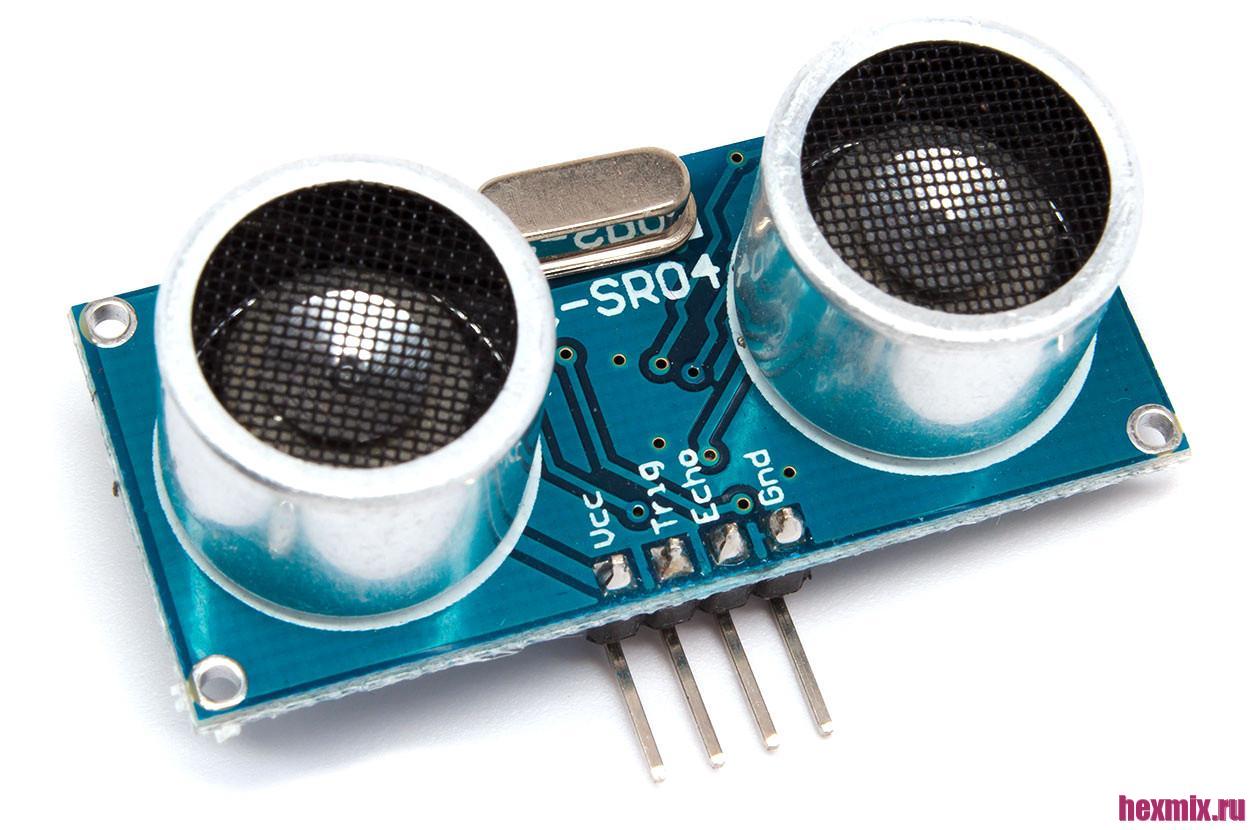
Рис.2. Ультразвуковой датчик HC-SR04
Остальные электронные компоненты ЭБСЛ2:
- Вибро-мотор; Аккумулятор Samsung ICR18650-26F 3.7v; Провода; Кнопка включения/выключения; Зарядное устройство TP4056К; GPS тракер.
2.2. Программирование на C++
Язык программирования Arduino является стандартным C++ (используется компилятор AVR-GCC) с некоторыми особенностями, облегчающими новичкам написание первой работающей программы.
Программы, написанные программистом Arduino называются наброски (и сохраняются в файлах с расширением ino.) Эти файлы перед компиляцией обрабатываются препроцессором Ардуино. Также существует возможность создавать и подключать к проекту стандартные файлы C++.
Функция слежения осуществляется при помощи программы Sinotracking.
3. Практическое воплощение и испытание ЭБСЛ2
3.1. Этапы сборки
Сначала была собрана схема из электронных компонентов
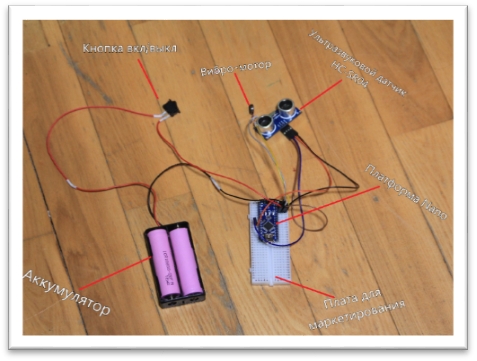
Рис. 3 Схема из электронных компонентов
Для основы, в которую будет помещена схема, был взят ботинок на высокой подошве.
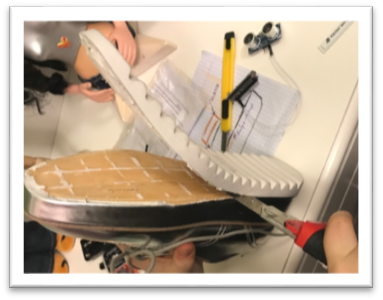
Рис.4 Подготовка основы для сборки
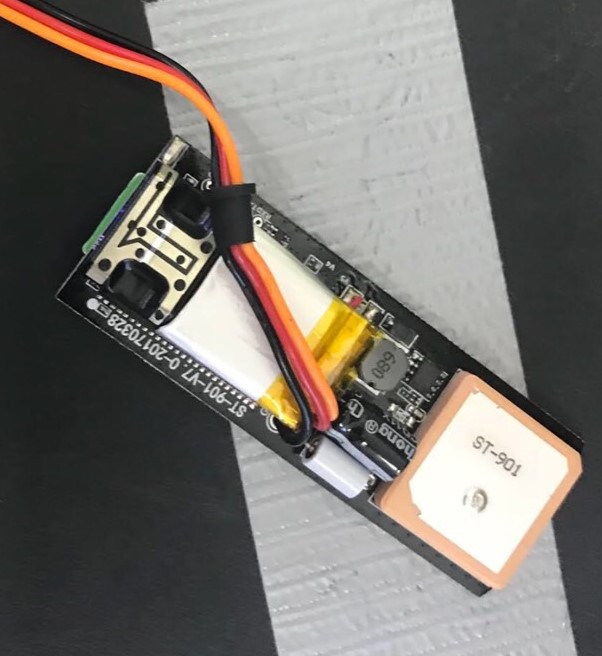
GPS тракер с встроенным микроконтроллером
Далее схема была помещена в ботинок.
В итоге все компоненты были надежно приделаны и закреплены в ботинке. Ботинок был готов к испытаниям.

Рис.6 Готовый ЭБСЛ2
3.2. Программирование структуры
После была написана программа на C++ ( с использованием компилятора AVR-GCC)
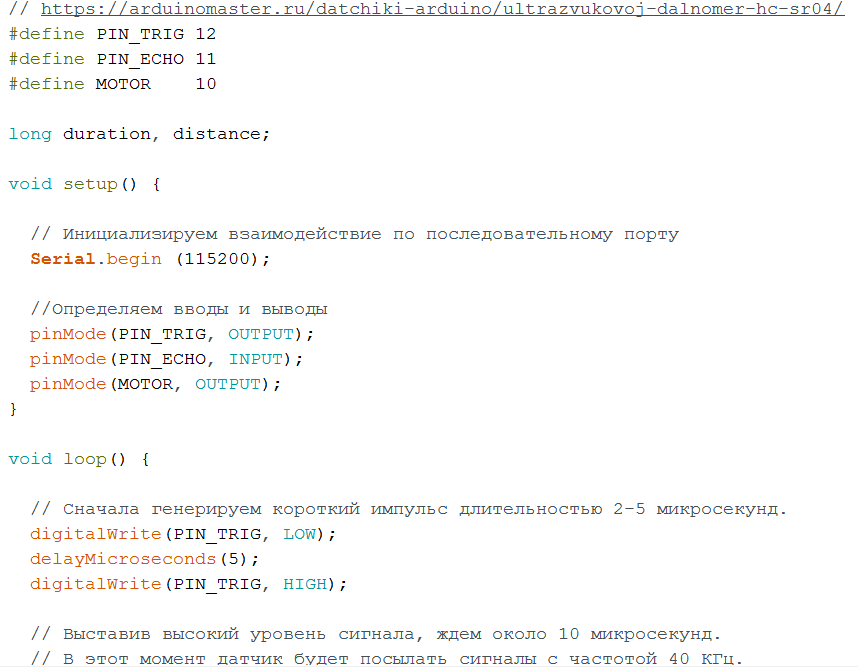
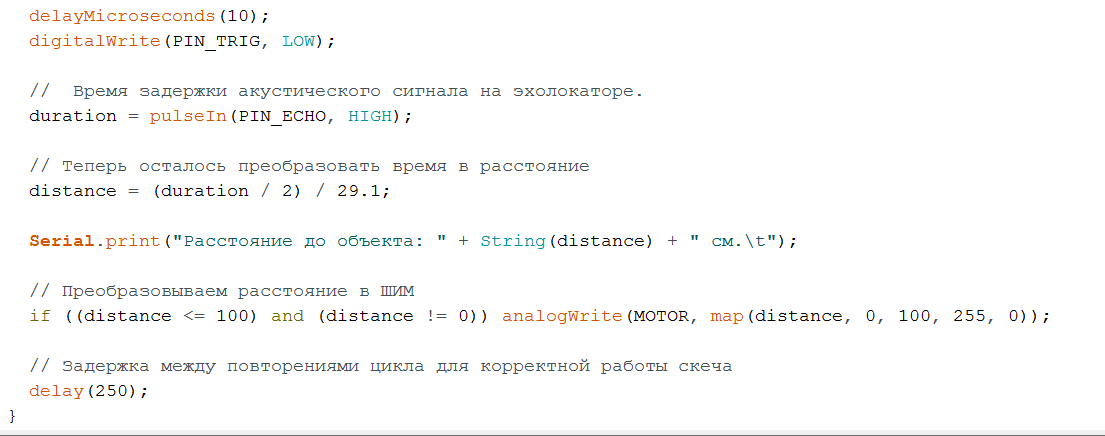 Рис. 8 и 9 Программа для ЭБСЛ2
Рис. 8 и 9 Программа для ЭБСЛ2
