

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, преподаватель кафедры «Энергетика»
Лекции по дисциплине «Электропривод и автоматизация»
ЛЕКЦИЯ 2 – МЕХАНИЧЕСКАЯ ЧАСТЬ ЭЛЕКТРОПРИВОДА
2.1 Уравнение движения электропривода
![]()
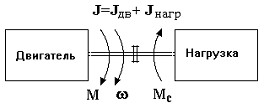
Самая простая механическая система - ротор двигателя и напрямую связанный с ним ИО РМ (насос, вентилятор). К ней приложены 2 момента - электромагнитный момент М, создаваемый двигателем, и момент сопротивления Мс, создаваемый нагрузкой + потери на трение. Система движется по закону инерции: , где щ - угловая скорость, J - суммарный момент инерции. Правая часть уравнения - динамический момент. Основное уравнение движения ЭП - Мдин = J∙е, где е – угловое ускорение.
Есть 2 режима работы ЭП:
1. Установившийся (статический) – ∑M=0. (М = Мс и противонаправлены, щ = const).
2. Переходный (динамический ) – ∑M#0 (движение ускоряется/замедляется, е>0).
2.2 Приведение моментов и моментов инерции
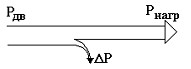
Обычно между ЭД и нагрузкой - механическая передача - несколько разных валов со своими массами, моментами и скоростями. Все данные об этом даёт кинематическая схема. Чтобы упростить расчёты ЭП и перейти к расчётной схеме, нужно выполнить приведение моментов и моментов инерции к одному основному валу - обычно двигателя, чтобы по его неизменному движению судить о движении других элементов). Для этого используется уравнение энергетического баланса системы: PДВ = РНАГР +ДP, где РНАГР – мощность статического сопротивления ИО, ДP – потери в механических звеньях.
Мощность ЭД через КПД: PДВ = РНАГР/з.
Мощность механизма – 1. при вращательном движении ИО: P=M∙щ, где М – момент на определённом звене, Н∙м, щ – его угловая скорость, рад/с (связана с частотой вращения n, об/мин) соотношением: щ = 2рn/60 = 0,105n), 2. при поступательном - P=F∙v, где – F – усилие нагрузки на ИО, Н, v – линейная скорость ИО, м/с.
Отношение угловой скорости ЭД к угловой скорости ИО: щД/щИ. О = iP – передаточное число редуктора. Применительно к зубчатой передачи - это отношение числа зубьев колеса (большое ведущее колесо) к числу зубьев шестерни (маленькое ведомое колесо). С учётом iР: MД = MИО/(iР∙з).
Отношение линейной скорости ИМ к угловой скорости ЭД: Vи. o/ωд = ρ - радиус приведения нагрузки к валу двигателя. С учётом с: MД = FИО∙с/з.
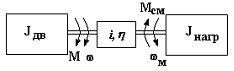
Для получения приведенного момента (М'с) нужно знать направление потока энергии. Если энергия направлена от ЭД к РМ – это прямое направление, от РМ к ЭД – обратное. Потери всегда покрываются той частью системы, которая создает движение, поэтому при обратном потоке мощности – от нагрузки к двигателю - М’с = Мсм∙з/iP. (в этом случае в формуле момента КПД (з) из знаменателя переходит в числитель).
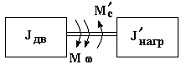
Переходная (реальная) схема Приведённая (расчётная) схема
Приведение моментов инерции к одной оси вращения основано на равенстве кинетических энергий переходной и приведенной системы. JДВ∙щ2/2 + JНАГР∙щМ2/2 = JДВ∙щ2/2 + J’НАГР∙щ2/2. Инерционность всех звеньев заменяется одним моментом инерции Jпр, приведенным к валу двигателя: JПР = JДВ+ JДВ/i12+…+ JДВ/in2, где in - передаточное отношение редуктора от вала двигателя до n-го элемента; JДВ - момент инерции двигателя и других элементов (муфты, шестерни и т. п.) на его валу. Если есть поступательное движение, то ещё +m∙с2 в правой части формулы JПР. Часто в каталогах ЭД указывается величина махового момента GD2, кгс⋅м2, тогда J = GD2/4. (кгс – килограмм сила)
На расчётной схеме моменты инерции рисуют как прямоугольники, площадь которых пропорциональна величине JПР.
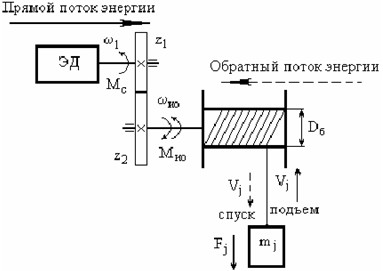
Рисунок 2.1 – силы и моменты в
кинематической съеме ЭП
2.3 Механические характеристики производственных механизмов
Механическая характеристика (МХ) –
зависимость между угловой скоростью и моментом
вращения (для двигателя) - ωд = f(M) или мо-
ментом сопротивления (для механизма), приве-
денным к валу двигателя - ω = f(Mс). При проектировании
ЭП МХ двигателя и механизма должны соответствовать друг
другу. Так как моменты и скорость могут иметь различные
знаки, МХ могут располагаться в четырех квадрантах плоскости.
Знаки определяются по положительному направлению, например:
по часовой стрелке или вверх и т. п. На рисунке МХ асинхронного двигателя (М) и центробежной машины (Мс). Моменты по движению – движущие (знак как у скорости - участок щ0-Мк. з на М); против – тормозящие (знак не как у скорости - остальные участки).
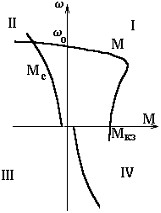
Моменты делятся на активные и реактивные.
1. Активные моменты - движущие и тормозящие. Их направление не зависит от направления движения: вращательный момент, момент, созданный грузом.
Их МХ могут быть в любом из 4х квадрантов.
2. Реактивные моменты – всегда тормозящие: момент от сил трения, момент, создаваемый центробежной машиной (Мс) и т. п. МХ всегда располагаются во II и IV квадрантах.
МХ механизмов делятся на 4 группы:
I группа - Mс = f(ω) – МХ строят на основе формулы:

где МТР – момент механических потерь на трение,
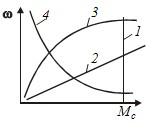
МС. НОМ - статический момент РМ при номинальной скорости вращения щн; щ – текущая скорость вращения; х – коэффициент пропорциональности, который имеет 4 значения, откуда и 4 МХ:
Прямая 1 – при х=0 - Mс (ω) = const – МС не зависит от скорости - такая МХ у подъемных кранов, лебедок, поршневых насосов при неизменной высоте подачи, конвейеров при неизменной массе перевозимого груза.
Прямая 2 – при х=1 - МС линейно зависит от скорости - привод двигателя постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
Кривая 3 – при х=2 - МС квадратично зависит от скорости - вентиляторы, центробежные насосы, гребные винты. Это наиболее распространенная МХ.

Кривая 4 – при х=-1 - МС гиперболично зависит от скорости – большинство металлорежущих станков. (с ростом скорости подачи резца V растет усилие резания, что снижает скорость обработки детали щ).
II группа - Mс = f(б), б – угол поворота. Это шатунно-кривошипный механизм, преобразующий вращательное движение с частотой вращения щ в возвратно-поступательное со скоростью V. Mcmax при б = р/2, обратный Mcmax – б = 3р/2.
III группа - Mс = f(б, щ). Момент одновременно зависит от скорости и угла поворота. (движении электротранспорта на закругленном участке пути).
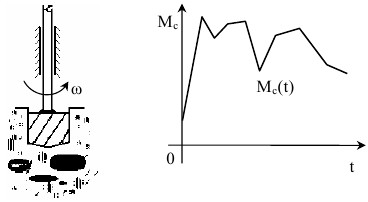
IV группа - Mс = f(t) – момент случайным образом зависит от времени. Это геологические буровые станки, дробилки крупного дробления и подобные механизмы.
2.4 Механические характеристики двигателей
Прямая 1 – щД при изменении М постоянна. Это МХ синхронного двигателя.
Прямая 2 – щД при изменении М меняется незначительно. Это МХ двигателя асинхронного (в пределах рабочей части) и постоянного тока независимого возбуждения.
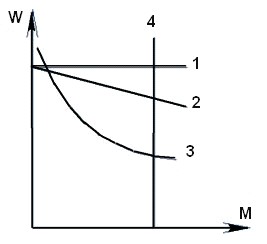
Кривая 3 – щД при изменении М меняется значительно. Это МХ двигателя постоянного тока последовательного возбуждения.
Кривая 4 – M при изменении щД постоянен. Это МХ двигателя постоянного тока независимого возбуждения при питании от источника тока (I = const).
Для оценки свойств МХ ЭП есть понятие жесткости характеристики, что определяется - ![]() где ΔМ – изменение момента двигателя;
где ΔМ – изменение момента двигателя;
ΔωД – соответствующее изменение угловой скорости.
Для линейных МХ β=const, для нелинейных – зависит от рабочей точки.
Есть 4 степени жесткости МХ: 1 – абсолютно жесткая (β = ∞); 2 – жёсткая. (β > 0);
3 – мягкая (β < 0). 4 – абсолютно мягкая (β = 0);
Механические характеристики позволяют определить:
1) Координаты ЭП в установившемся режиме; (пересечение МХ ЭД и РМ).
2) Степени устойчивости установившегося режима. (вернется ли система после случайного возмущения к исходному статическому состоянию или нет).
3) Способы регулирования скорости и момента двигателя.
4) Энергетический режим работы двигателя и механизма.
