
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Введение
Гипотеза – сможем ли мы собрать в домашних условиях прибор для измерения масс тел в невесомости.
Невесомость – состояние механической системы, при которой действующие на систему внешнее гравитационное поле не вызывает взаимного давления одной части системы на другую и их деформации.
Актуальность - разработка приборов, позволяющих проводить научные исследования в условиях невесомости (на борту космических станций, кораблей и т. д.), в условиях микрогравитации и гравитации, отличной от земной, является перспективным направлением современной инженерной науки и технологии. К важным и неотъемлемым для научных и других нужд устройствам измерительной аппаратуры относятся приборы – весы, позволяющие определять массу опытных образцов разнообразной природы (твердотельной, жидкой, сыпучей). Поскольку невесомость и микрогравитация делают невозможным использование традиционных весов, актуальной задачей является разработка устройств, позволяющих быстро и с высокой точностью определять массу в таких условиях.
Для выполнения работы была сконструирована действительная модель инерционных весов, также была построена соответствующий ей градуировочная зависимость. Были проведены эксперименты определения масс жидкостей и веществ сыпучей природы.
Цели проекта:
1. Сконструировать измерительный прибор, для определения массы тел в невесомости.
2. Составить градуировочную зависимость сконструированного прибора.
3. Определить массу экспериментальных образцов.
Теоретическая часть
Вес – это сила, с которой тело действует на опору или подвес под действием притяжения к Земле. Вес измеряется в ньютонах в отличие от массы, которая измеряется в килограммах. Вес является мерой силы тяжести между объектом и планетой. Если тело находится на неподвижной горизонтальной опоре, то его вес по модулю будет равен силе реакции опоры (рис. 1):
![]()
![]() . (1)
. (1)

Рис. 1. Силы, действующие на тело, находящееся на горизонтальной опоре в состоянии покоя скомпенсированы.
При измерении массы тела на обычных весах фактически измеряют силу, с которой тело давит на чашку весов, и эту силу приводят в соответствие с массой, которая в этом случае интерпретируется как гравитационная. Эта масса встречается в Законе всемирного тяготения Ньютона:
![]()
![]() (2)
(2)
или
![]()
![]() (3)
(3)
С точки зрения второго закона Ньютона (F = ma) масса служит мерой инертности тела.
Масса тела неизменна, тогда как вес тела может изменяться при неизменной массе. Это может происходить, если сила тяготения отличается от земной, например, если использовать весы на отличной от Земли планете. Если тело находится в состоянии ускоренного движения, вес тела также может меняться (рис. 2) .
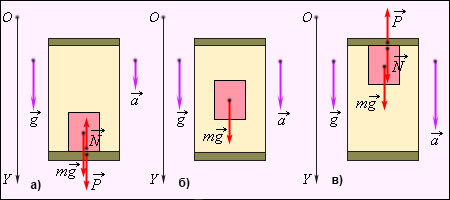
Рис. 2. Вес тела в лифте меняется в зависимости от характера движения лифта. а) лифт движется вниз с ускорением, меньшим g, сила давления тела на пол лифта (т. е. его вес) уменьшена; б) ускорение лифта по модулю и направлению равно ускорению свободного падения, тело находится в состоянии невесомости; в) ускорение падающего лифта превосходит ускорение свободного падения, вес тела «отрицателен».
Невесомость – состояние, в котором находится материальное тело, свободно движущееся в поле тяготения Земли (или любого др. небесного тела) под действием только сил тяготения [1]. Отличительная особенность состояния невесомости заключается в том, что действующие на частицы тела внешние силы (силы тяготения) не вызывают взаимных давлений частиц тела друг на друга. Таким образом, даже при наличии опоры или подвеса, соприкасающихся с телом ни опора, ни подвес на тело воздействовать не будут.
Невесомость может существенно влиять на ряд физических явлений. Например, у жидкости, налитой в сосуд, силы межмолекулярного взаимодействия, малые в «земных» условиях по сравнению с силами давления, обусловленными весомостью, влияют только на форму мениска. При невесомости действие этих сил приводит к тому, что смачивающая жидкость, помещённая в закрытый сосуд, равномерно распределяется по стенкам сосуда, а воздух, если он есть, занимает среднюю часть сосуда, несмачивающая же жидкость принимает в сосуде форму шара. Капли вылившейся из сосуда жидкости тоже стягиваются в шарики.
Вследствие значительного отличия условий невесомости от «земных» условий, в которых создаются и отлаживаются приборы и агрегаты искусственных спутников Земли (ИСЗ), космических летательных аппаратов и их ракет-носителей, проблема невесомости занимает важное место среди других проблем космонавтики. Так, в условиях невесомости непригодны приборы и устройства, в которых используются физические маятники или свободная подача жидкости и т. п. Учёт невесомости становится особенно существенным для систем, имеющих ёмкости, частично заполненные жидкостью, что, направление, имеет место в двигательных установках с жид-костно-реактивными двигателями, рассчитанных на многократное включение при космическом полёте. Возникает и ряд других технических проблем.
В космических летательных аппаратах, в условиях невесомости на тело, помещенное на опору или подвешенное к пружине, не действует никаких сил, кроме силы тяжести, т. е. отсутствует силы реакции со стороны опоры и упругости со стороны пружины, поэтому взвешивание тел традиционным способом становится невозможным.
По этой причине поиск альтернативных способов определения массы тел в условиях космической станции представляется весьма актуальной задачей. Для этого необходимо использовать приборы взвешивания, принципиально отличающиеся от традиционных. В основе определения массы тела в условиях невесомости лежит определение массы, как меры инертности тела и принцип эквивалентности гравитационной и инерциальной массы, сформулированной А. Энштейном.
Понятие «масса» фигурирует в двух разных законах – во втором законе Ньютона и в законе всемирного тяготения. В первом случае она характеризует инертные свойства тела, во втором – гравитационные свойства, то есть способность тел притягиваться друг к другу. В связи с этим возникает вопрос, не следует ли различать инертную массу и массу гравитационную. Ответ на этот вопрос может дать только опыт.
Всякое тело вблизи поверхности Земли испытывает силу притяжения
|
Под действием этой силы тело приобретает ускорение:
|
Опыт показывает, что ускорение а для всех тел одинаково: a = g.
Следовательно min = mg. Поэтому говорят просто о массе.
1867 г. Ньютон доказал это равенство с точностью до 10-3.
1901 г. Венгерский физик Этвеш получил такое совпадение с точностью до 10-8.
1964 г. Американский ученый Дикке улучшил точность измерения в 300 раз.
Тождественность инерциальной и гравитационной масс Эйнштейн положил в основу общей теории относительности. Следствием этого является тот факт, что, находясь внутри закрытой кабины, невозможно определить, чем вызвана сила mg: тем, что кабина движется с ускорением a = g или действием притяжения Земли [2].
Чтобы определить инерциальную массу тела в лабораторных условиях необходимо, придав ему некое ускорение, каким-либо способом получить параметр, который характеризует инерциальную способность тела, сохранять свою скорость постоянной. Таким параметром может служить величина отклонения тела от точки равновесия, усилие с которым тело, подвергнутое ускоренному движению, воздействует на динамометр и т. д.
Ниже приведены принципиальные схемы приборов, с помощью которых возможно измерять массу тел в условиях невесомости. Использование любого прибора для измерения массы в условиях невесомости предполагает его предварительную калибровку, т. е. построение шкалы измерений с использованием стандартных, заранее известных масс.
1. На рис 3. приведена схема измерения массы тела, основанная на законе сохранения импульса. ![]()
![]() (7)
(7)
Тело «выстреливают», т. е. придают ему некий импульс и с помощью измерительного прибора, измеряют силу его удара о мишень. Чем больше сила удара, тем больше масса тела.
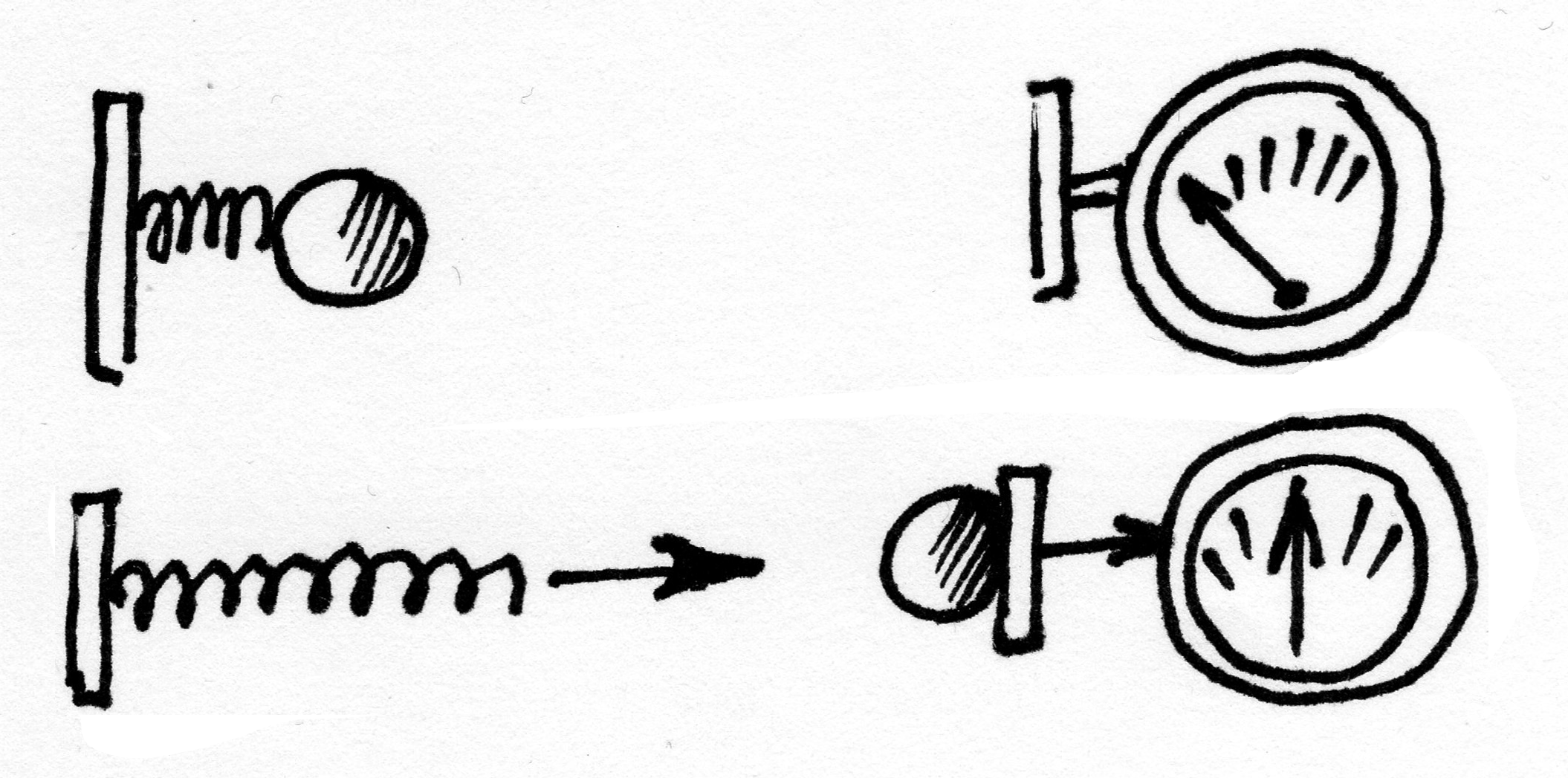
Рис. 3. Схема определения массы тела, использующая в свое работе закон сохранения импульса.
2. В основе принципиальной схемы, изображенной на рис. 4 лежит измерение центростремительной силы, сообщаемой телу.![]()
![]()
К измеряемой массе ещё можно прицепить реактивный двигатель с известной тягой и посмотреть, как быстро будет разгоняться тело. Отсюда снова получим массу. Для больших объектов типа звезд или планет применяются уже другие способы, конечно, непрямые. Например, массу Солнца можно определить с некоторой точностью, исходя из параметров орбиты планеты, обращающейся вокруг него (это если считать, что масса планеты много меньше массы Солнца).
Для дальних рубежей космоса можно применить релятивистские законы, в частности, факт искривления света под воздействием гравитации, которая пропорциональна массе. Подобные измерения были проведены и для нашего Солнца.
(8)
Тело закрепляется на вращающейся платформе, с полу-подвижным штоком. Платформа раскручивается, в месте нахождения тела, платформа отклоняется и с определенным усилием давит на динамометр. Величина измеряемой силы соответствует определяемой массе.
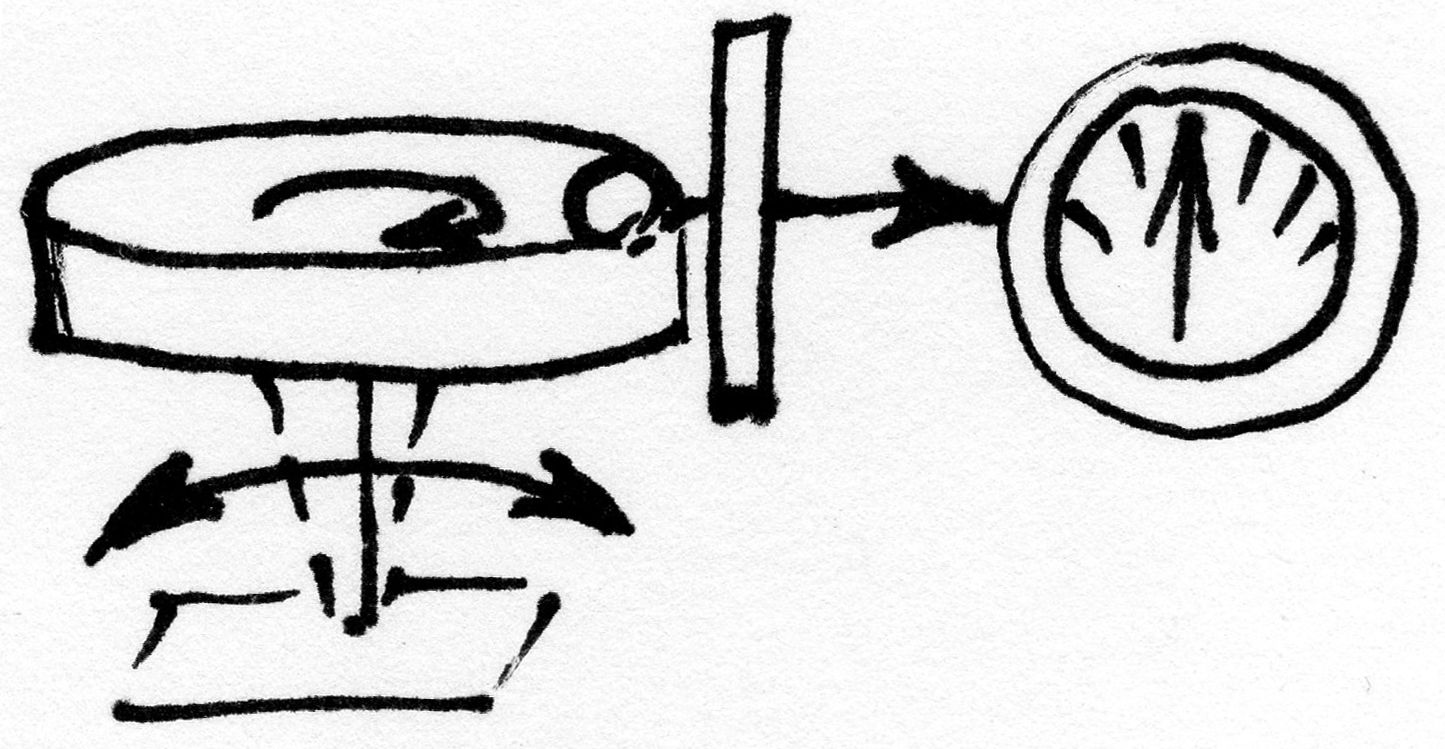
Рис. 4. Использование центростремительной силы при измерении массы тела.
Наиболее удобным и перспективным способом определения инерциальной массы тел в условиях невесомости считается использование различного рода осцилляторов, приборов позволяющих измерять параметры колеблющегося тела.
3. Тело фиксируется между двумя пружинами, отклоняют от положения равновесия и измеряют характеристики колебаний. Колебания происходят под действием возникающих сил упругости. При измерении массы используют закон Гука (рис. 5).
![]()
![]() (9)
(9)
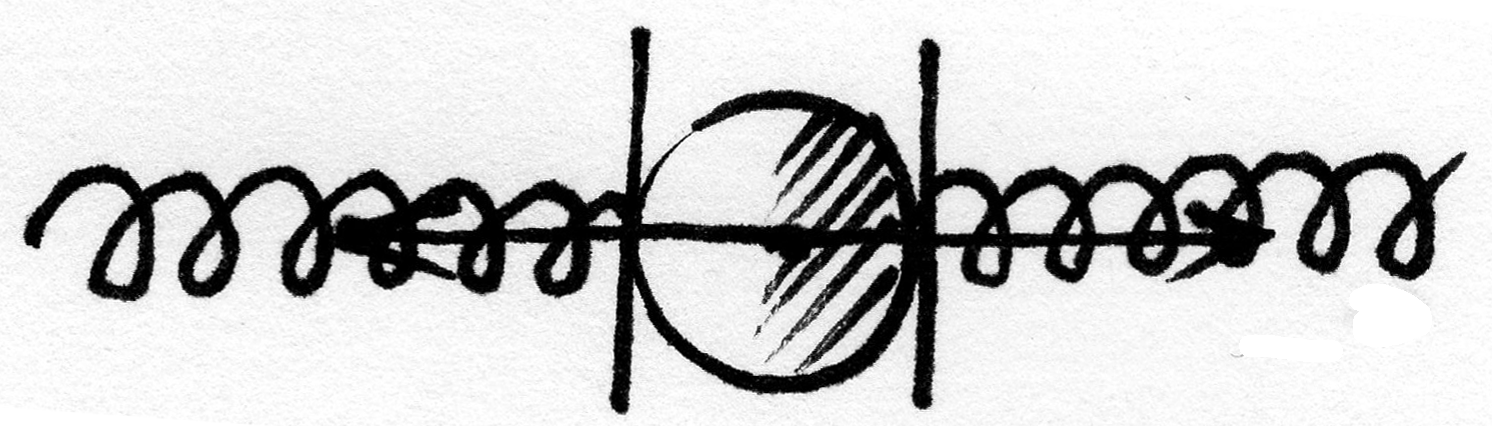 Рис. 5. Измерение массы на основе закона Гука.
Рис. 5. Измерение массы на основе закона Гука.
4. Настоящая схема нашла применение в реальных условиях. Для процедуры взвешивания на борту МКС имеется нечто вроде стула на пружинах, который раскачивают с помощью специальных моторов с выверенным усилием. Частота колебаний стула зависит от массы груза, так что астронавту достаточно совершить несколько колебаний, чтобы через некоторое время электроника посчитала и выдала искомый результат (рис. 6 и 7).
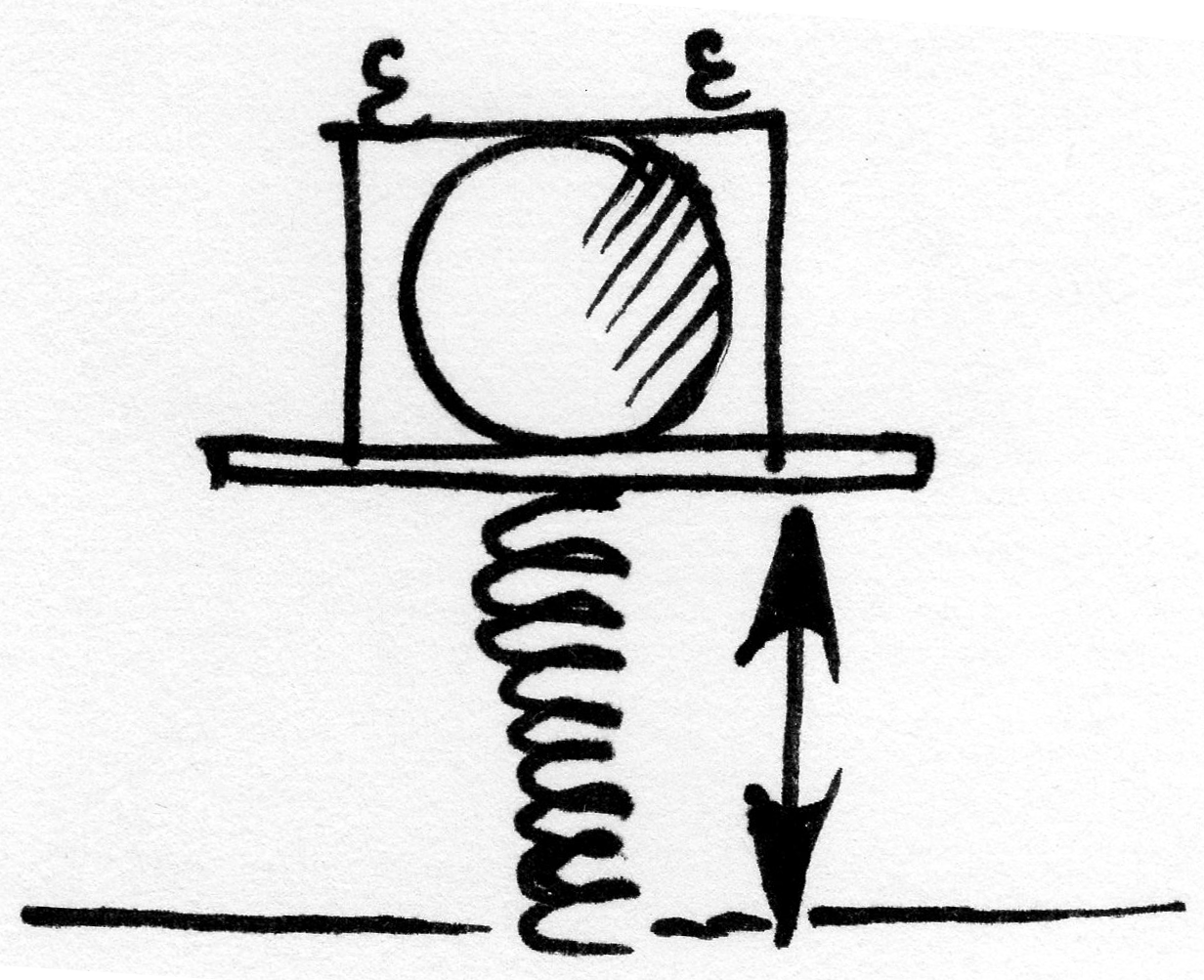
Рис. 6. Схема реальной установки, работающей на борту МКС.

Рис. 7. Установка, способная измерить вес астронавта на борту МКС.
5. Схема осциллятора, предусматривающая использование упругих пластин, колеблющихся в поперечном направлении. Данную схему отличает простота и независимость от воздействия внешних сил, она наиболее подходит для измерения инерциальной массы, как в условиях невесомости, так и в условиях гравитации и микрогравитации (рис. 8).
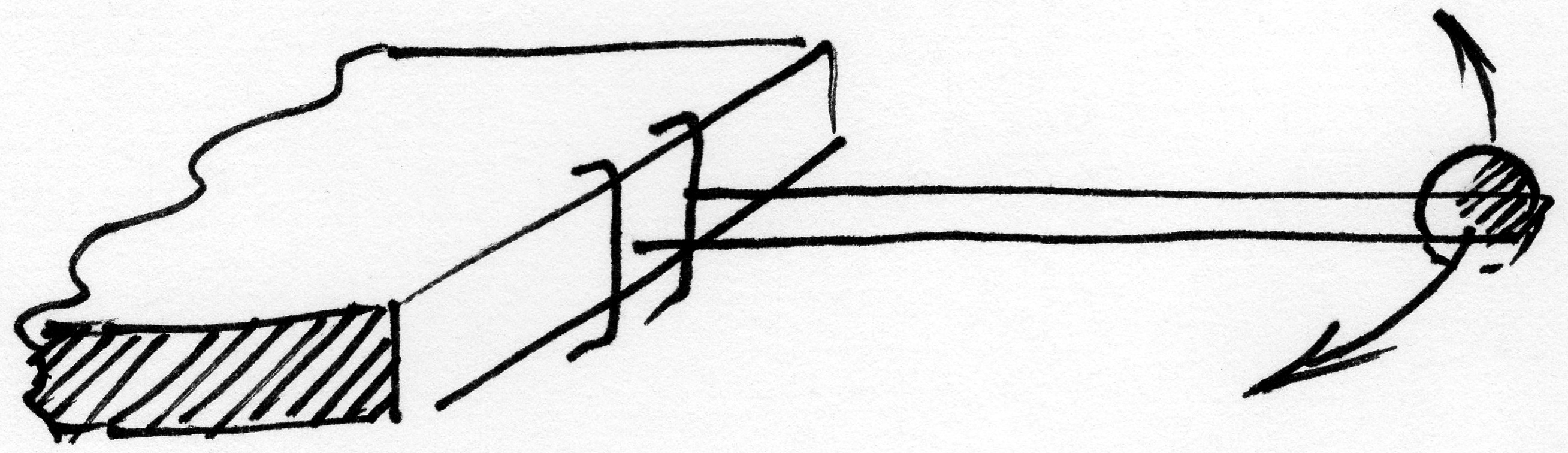
Рис. 8. Осциллятор, колеблющийся в поперечном направлении.
Платформа может перемещаться в горизонтальной плоскости всегда стремясь занять среднее положение (равновесия) за счет жесткости плоских пружин. Роль вращающейся силы F играет реакция упруго деформированных пружин подвеса платформы.
При изменении массы платформы жесткость пружин не изменяется величина возвращающей силы упругости F.
По закону Гука эта сила для упругих полос выражается уравнением:
![]()
![]() т (10)
т (10)
Где x – величина смещения платформы от положения равновесия;
K – коэффициент упругости пружины, выражающий величину силы, которая вызывает смещение, равное единице.
Запишем уравнение гармонического колебательного движения для смещения в следующем виде:
![]()
![]() (11)
(11)
Где A –амплитуда колебаний;
ω - циклическая частота колебаний.
Скорость V и ускорение а при колебательном движении определяется формулами:
![]()
![]() = A
= A![]()
![]() ω⋅t (12)
ω⋅t (12)
![]()
![]() (13)
(13)
Учитывая что, ![]()
![]() . Где T – период колебаний, т. е. время одного полного колебания, получим:
. Где T – период колебаний, т. е. время одного полного колебания, получим:
![]()
![]() (14)
(14)
Знак минус означает, что ускорение а и упругая сила F в колебательном движении всегда направленны противоположно смещению x. Подставив F и a в выражение для второго закона Ньютона (1), получим:
![]()
![]() (15)
(15)
Зная период колебаний T и коэффициент упругости k, который для данных пластин есть величина постоянная, можно определить массу платформы с находящимся на ней грузом.
Если массу m рассматривать как сумму масс платформы m0 и груза mx, то можно написать:
![]()
![]() (16)
(16)
В данном случае величины k и m0 не известны, поэтому определение массы груза возможно с помощью инерционных весов и тарировочного графика построенного опытным путем.
(17)
Раскрутив тело можно узнать его массу. Тогда, зная параметры вращения и измерив центробежную силу, мы узнаем его массу. А если измерять небольшие массы, то проще всего использовать линейный или крутильный пружинный маятник. Предмет, масса которого неизвестна, закрепляется на конце пружины, жесткость которой известна. Он оттягивается и отпускается, и начинаются колебания. Если не учитывать диссипативные потери энергии (сопротивление воздуха и, если есть, потери в самой пружине при сжатии-растяжении), то период установившихся колебаний будет пропорционален квадратному корню из массы.
![]()
Под небольшой массой я подразумеваю такую, для которой можно сделать пружину и вообще провести весь этот эксперимент, то есть размером от нескольких молекул (такие весы широко используются в разных датчиках) до огромных масс вроде небольших астероидов.
(18)
А ещё можно пульнуть чем-нибудь с известной массой по измеряемому телу и посмотреть на результат. При возможности измерить относительные скорости до и после пуляния мы сразу получим все данные, используя закон сохранения импульса и энергии. При этом даже если тело распадется, массу кусков мы всё равно узнаем.
![]()
(19)
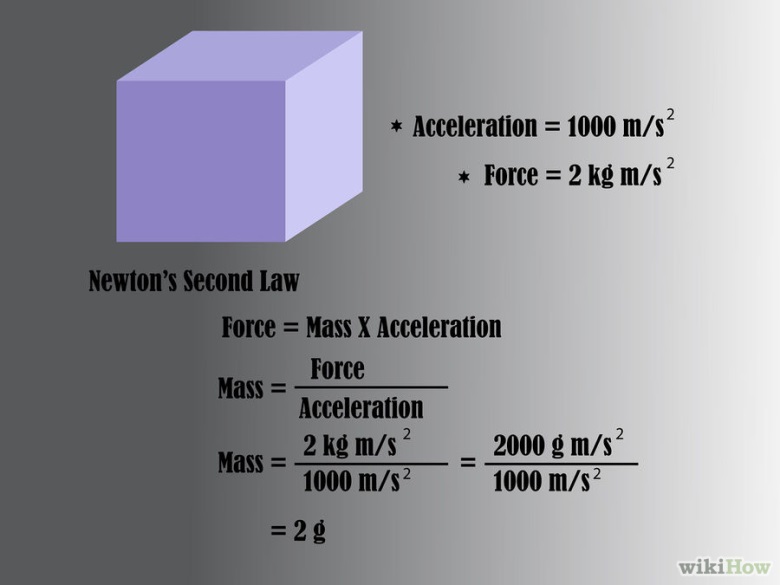
Также есть способ нахождения массы без весов:
1.Найдем объём объекта. Например, у вас есть куб размерами 10х10х10. Его объем - 1000.
2. Используйте формулу: масса=плотность на объем. Теперь вам нужно найти плотность объекта. Если ваш объект - вода, например, ее плотность 1 гр/см3. Значит вес воды - 1000 г.
3. С помощью применения силы мы должны определить массу, разделив ускорение на силу (по второму закону Ньютона: Е=mg2).
Например, если у куба ускорение 1000 мм в с2, а применяемая сила - 2 кг на мм в с2, значит масса куба 2 г.
Обсуждение результатов
В настоящей работе решена задача измерения инерциальной массы тел в условиях, при которых действие сил тяготения сведены к минимуму. Для решения этой задачи были сконструированы инерциальные весы, с помощью которых можно определять массу грузов до 50 г (Фото 1). Принцип работы данных весов заключается в измерении параметров колебаний упругих рабочих пластин (1) с закреплённой на них платформой (2) с измеряемым грузом.
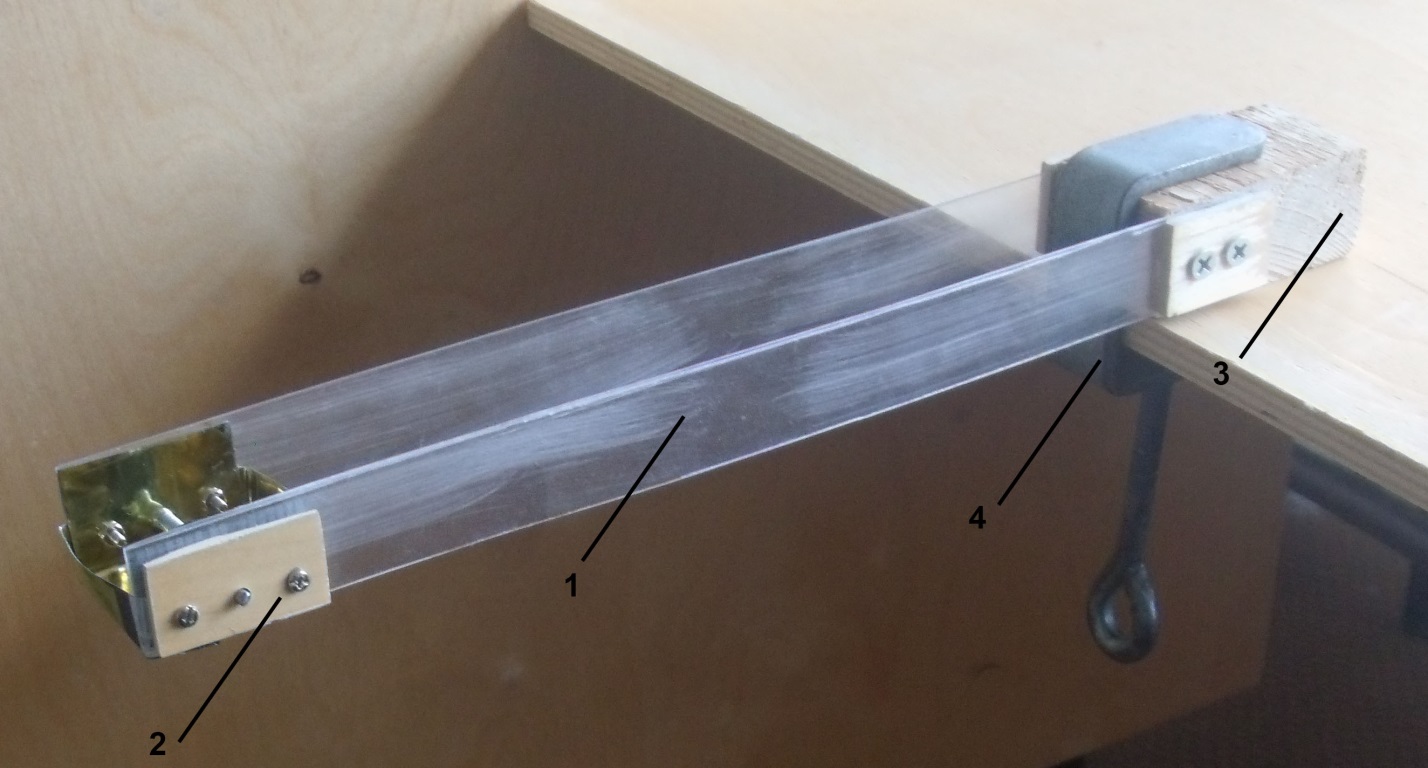
Фото 1. Инерциальные весы. 1 – рабочие пластины; 2 – платформа для взвешивания; 3 – суппорт.
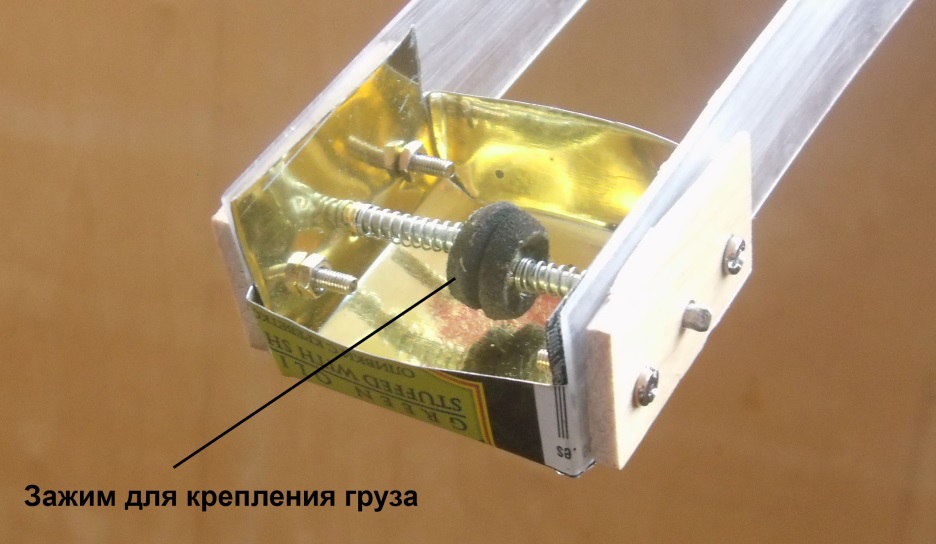
Фото 2. Устройство измерительной платформ инерциальных весов.
Поскольку колебания происходят в горизонтальной плоскости, влияние силы тяготения при измерении массы сведено к минимуму. Измеряемый груз закреплен на платформе (2) при помощи специального зажима (Фото 2) , для того чтобы предотвратить его возможное проскальзывание и, следовательно, инерционные помехи также как и возникающие силы трения, которые тоже зависят от силы тяжести (Fтр = k ⋅ mg, где k – коэффициент трения).
Построение градуировочного графика
Для того чтобы построить градуировочный график использовали стандартные разновесы массой 5, 10, 20, 50 г. Кроме того производили измерения при отсутствие разновеса на платформе (0 г). Измерения каждой массы проводили десять раз, отклоняя весы от положения равновесия на расстояние не более двух сантиметров, таким образом влияние возникающих при измерениях центростремительных сил сводили к минимуму. Минимальное отклонение от положения равновесия и достаточная длина упругих рабочих пластин инерциальных весов позволяет считать, что колебания измеряемого груза происходят вдоль прямой. Таким образом, измеряли время, за которое весы с измеряемым грузом или без него совершали 30 полных колебаний. Точность измерения зависит от числа колебаний, однако использовать более 30 колебаний на данной модели инерциальных весов оказалось невозможно из-за затухания колебаний. Результаты измерений приведены в таблице 1.
Измеряемые грузы | Масса разновесов, г | Эксперимен-тальные** | |||||
0 | 5 | 10 | 20 | 50 | вода | соль | |
Время, полных 30 колебаний | 13,35 | 15,38 | 16,53 | 18,51 | 26,00 | 15,23 | 15,43 |
13,45 | 15,55 | 16,65 | 18,53 | 26,36 | 15,21 | 15,46 | |
13,41 | 15,56 | 16,50 | 18,50 | 25,93 | 15,16 | 15,41 | |
13,44 | 14,78 | 16,38 | 18,56 | 25,76 | 15,16 | 15,43 | |
13,42 | 14,91 | 16,55 | 18,53 | 25,80 | 15,16 | 15,49 | |
13,43 | 14,88 | 16,58 | 18,70 | 25,53 | 15,16 | 15,51 | |
13,38 | 15,08 | 16,51 | 18,58 | 25,78 | 15,18 | 15,49 | |
13,39 | 15,35 | 16,55 | 18,50 | 25,55 | 15,18 | 15,46 | |
13,40 | 15,36 | 16,40 | 18,46 | 25,58 | 15,13 | 15,58 | |
13,40 | 15,25 | 16,45 | 18,54 | 26,13 | 15,31 | 15,55 | |
Среднее * | 13,41 | 15,21 | 16,51 | 18,54 | 25,84 | 15,19 | 15,48 |
Период T, с * | 0,45 | 0,51 | 0,55 | 0,62 | 0,86 | 0,51 | 0,52 |
T2, с * | 0,2 | 0,26 | 0,30 | 0,38 | 0,74 | 0,26 | 0,27 |
Таблица 1. Результаты измерения масс на инерциальных весах.
*Данные вычислены с помощью программного обеспечения Microsoft Excel и округлены с точностью до 2-го знака.
По результатам измерений по пяти точкам был построен градуировочный график (рис. 9).
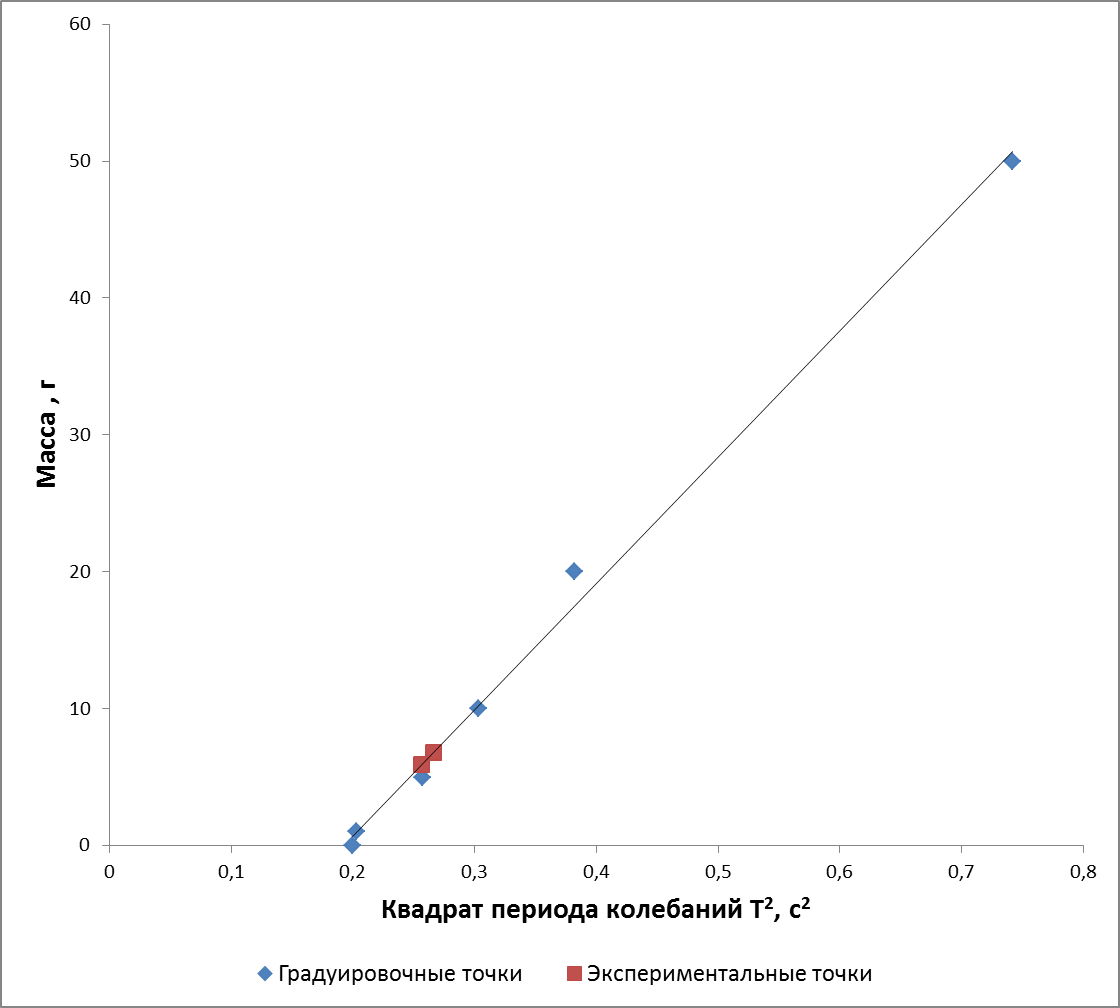
Рис. 9. Градуировочный график с экспериментальными точками.
Поскольку процесс колебаний описывается уравнением:
![]()
![]() (I),
(I),
где m – измеряемая масса, k – коэффициент упругости, T – период, mп – масса платформы, т. е. измеряемая масса зависит от квадрата измеренного периода, график строили в координатах: квадрат периода – по оси абсцисс и измеряемая масса – по оси ординат. Т. о. была получена линейная зависимость измеряемой массы от квадрата периода (T 2).
Градуировочную прямую строили средствами программного Microsoft Excel, она описывается уравнением:
m = 92,24 ⋅ (T 2) – 17,74 (II).
Измерение массы опытных образцов
В ходе эксперимента представлялось интересным измерить массы измерить массы грузов нетвердотельной природы, а именно жидкости и сыпучего вещества. Для этого в две пробирки с плотно завинчивающейся крышкой объёмом 5 мл каждая, были помещены произвольные количества воды и поваренной соли. Измерения проводили как для случая со стандартными разновесами. Массу обеих пробирок вычисляли, подставляя измеренные значение T2 в уравнение (II):
mводы = 92,24 ⋅ 0,256305938 – 17,47 ≈ 5,91 [ г ]
mсоли = 92,24 ⋅ 0,266290401 – 17,47 ≈ 6,80 [ г ]
Массу тары и вещества предварительно измеряли на контрольных электронных лабораторных весах. Результаты измерений приведены в таблице 1. Полученные массы приведены в таблице 2.
Образец | Экспериментальное взвешивание, г | Контрольное взвешивание, г | ||||
Масса брутто, вычисленная по уравнению (II), г. | Нетто | Ошибка* | Брутто | Тара | Нетто | |
Вода | 5,91 | 2,3559 | 0,05 | 5,96 | 3,5541 | 2,4059 |
Соль | 6,80 | 3,2462 | 0,15 | 6,97 | 3,5538 | 3,4162 |
Таблица 2. Измеренные массы экспериментальных образцов.
*Ошибка вычислена по разности масс нетто при контрольном и экспериментальном взвешивании.
По результатам экспериментального и контрольного взвешивания опытных образцов, величина ошибки определения инерциальной массы составила не более 0,15 г.
Экспериментальная часть
Конструкция инерционных приведена на рисунке 1, Градуировочный график строили, измеряя массу стандартных разновесов 5, 10, 20, 50 г (ГОСМЕТР, Ленинград), нулевую точку графика строили без использования разновесов. Контрольное взвешивание производили с помощью электронных лабораторных весов GR120 (AND, Япония).
При каждом измерении один из разновесов закрепляли в инерционных весах, весы отклоняли от положения равновесия не более чем на 2 см. С помощью секундомера мы измеряли время, за которое весы сделают 30 полных колебаний. Для каждого разновеса измерения повторяли 10 раз. Данные обрабатывали с помощью программного обеспечения MS Excel (Microsoft Office 2010).
