
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Введение
Настоящие методическое пособие предназначено для изучения раздела «Автоматика» междисциплинарного комплекса МДК 03.01., дисциплин «Основы автоматика», «Системы автоматического управления»
В пособии рассматриваются методы цифрового моделирования систем автоматического управления и программные средства для их проведения, рассматриваются способы построения математических моделей.
В первой части инструкции (Часть 1) приведен способ описания систем дифференциальными уравнениями. В следующей части (Часть 2) инструкции будет представлен способ описания систем как совокупности множества передаточных функций.
Для иллюстрации примера использована версия 7.11 программы MATLAB.
Работа с другими версиями MATLAB аналогична, за исключением вида «окон».
Мы постарались максимально упростить инструкцию и в доступной форме показать как можно пользоваться Simulink
Часть 1. Общие сведения о системе Simulink
Программа Simulink является приложением к пакету MATLAB.
При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает.
Основным понятием системы моделирования Simulink является сигнал. По умолчанию, сигналы – это скалярные безразмерные переменные, связывающие компоненты модели. Однако, существуют и специальные сигналы, например электрические, гидравлические, механические и т. д., которые определенным образом описывают конкретное физическое влияние одних элементов моделируемой системы на другие. Компоненты модели – это элементы библиотеки Simulink или другие модели, которые осуществляют изменения сигналов (например, интегрирование, усиление, сложение двух сигналов и т. д.).
Simulink является достаточно самостоятельным инструментом и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления).
Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т. д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени
(с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Преимущество Simulink заключается также в том, что он позволяет пополнять библиотеки блоков с помощью подпрограмм написанных как на языке MATLAB, так и на языках С++, Fortran и Ada.
Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рисунке 1. Там же показана подсказка, появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов:
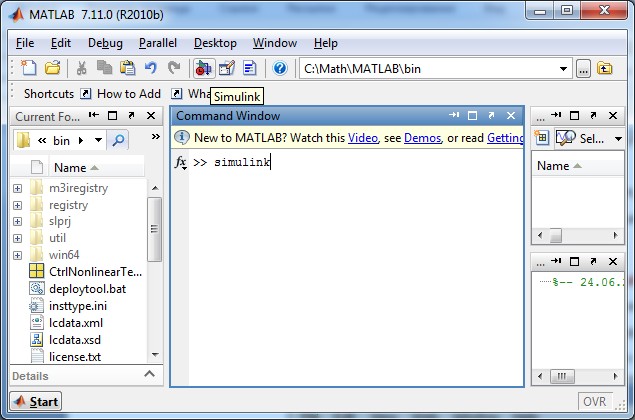
Рисунок 1- Основное окно программы MATLAB
∙ Нажать кнопку (Simulink) на панели инструментов командного окна MATLAB.
∙ В командной строке главного окна MATLAB напечатать Simulink и нажать клавишу Enter на клавиатуре.
∙ Выполнить команду Open... в меню File и открыть файл модели (mdl - файл).
Последний вариант удобно использовать для запуска уже готовой и отлаженной модели, когда требуется лишь провести расчеты и ненужно добавлять новые блоки в модель. Использование первого и второго способов приводит к открытию окна библиотеки Simulink (рисунок 2).
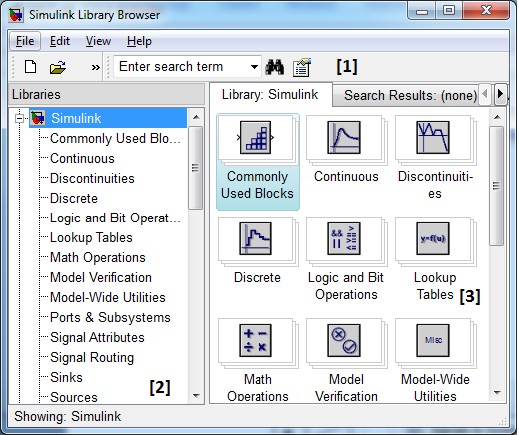
Рисунок 2- Окно библиотеки Simulink.
Цифрами обозначены: 1 –строка поиска компонентов, 2 – дерево библиотек Simulink, 3 –содержимое библиотеки (разделы или компоненты библиотеки)
На рисунке 2 выделена основная библиотека Simulink (в левой части окна) и показаны ее разделы (в правой части окна). Библиотека Simulink в MATLAB 2010 содержит следующие основные разделы:
monly Used Blocks – часто используемые компоненты из различных разделов основной библиотеки Simulink.
1. Continuous – компоненты для моделирования систем в непрерывном времени.
2. Discontinuities – компоненты для моделирования негладких и разрывных нелинейных функций.
3. Discrete – компоненты для моделирования систем в дискретном времени.
4. Logic and Bit Operations – компоненты для моделирования ло-
гических (двоичных) операций.
5. Lookup Tables – компоненты для моделирования функциональных и табличных зависимостей.
6. Math Operations – компоненты для моделирования математических операций.
7. Model Verification – компоненты для тестирования и верификации поведения моделей.
8. Model-Wide Utilities – вспомогательные компоненты для документирования и линеаризации моделей.
9. Ports & Subsystems – блоки построения иерархических моделей и подсистем.
10. Signal Attributes – компоненты для преобразования типов сигналов в моделях.
11. Signal Routing – компоненты для коммутации и объединения/разъединения сигналов.
12. Sinks – компоненты для отображения и сохранения сигналов.
13. Sources – источники сигналов и воздействий.
14. User-Defined Functions – компоненты для создания пользовательских функций, реализованных на языке MATLAB.
Список разделов библиотеки Simulink представлен в виде дерева, и правила работы с ним являются общими для списков такого вида:
∙ Пиктограмма свернутого узла дерева содержит символ+, а пиктограмма развернутого содержит символ −.
∙ Для того чтобы развернуть или свернуть узел дерева, достаточно щелкнуть на его пиктограмме левой клавишей мыши.
При выборе соответствующего раздела библиотеки в правой части окна отображается его содержимое (рисунок 3).
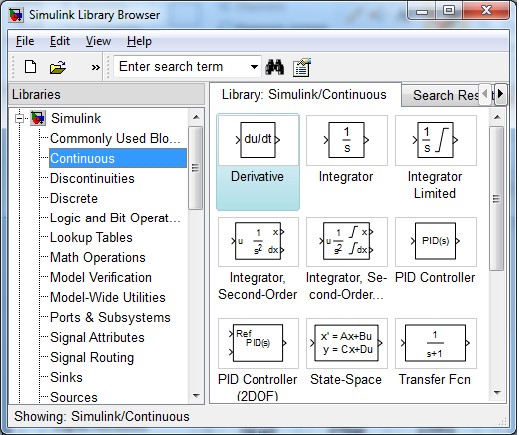
Рисунок 3- Компоненты библиотеки Simulink / Continuous.
Пример построения модели в Simulink
В качестве примера использования Simulink для моделирования систем рассмотрим отопление в жилом индивидуальном доме. Пусть для простоты, дом состоит из всего лишь одного помещения, в котором установлено отопление суммарной тепловой мощностью ��. Температура внутри этого дома ���� градусов, температура за окном – ���� градусов. Нас интересует каким образом изменяется температура ���� при изменении мощности �� (рисунок 4).

Рисунок 4- Модель отапливаемого помещения по входу-выходу.
Прежде чем составлять модель, рассмотрим интуитивно некоторые ее свойства. Во-первых, вполне очевидно, что если включить отопление, то сначала температура будет расти, а потом стабилизируется – наступит тепловое равновесие между подводимым теплом и рассеиваемым на улицу через щели в окнах, вентиляцию и т. д. Если печку выключить, то температура будет падать и в конце-концов дома будет также холодно, как и на улице. Существенными
параметрами модели является:
∙ температура за окном ���� – чем меньше она, тем больше тепла
уходит из дома и тем больше нужна мощность нагревателя, чтобы достичь заданной температуры внутри ����;
∙ качество теплоизоляции – чем хуже теплоизоляция, тем больше тепла выходит наружу;
∙ масса воздуха внутри дома – чем больше воздуха, тем дольше его нужно нагревать до заданной температуры и тем дольше будет остывать дом при отключении отопления.
В теплотехнике существуют множество моделей, с разной степенью точности моделирующие процессы нагревания и охлаждения тел. Далее мы рассмотрим самый простой из них. Для этого необходимо ввести понятие количества теплоты – энергии, необходимой для изменения термодинамического состояния тела (например, температуры). Из курса физики хорошо известно, что для того, чтобы нагреть тело массой �� и теплоемкостью �� от температуры ��1 до ��2 необходимо затратить количество теплоты ��, равное
�� = ����(��2 − ��1)
Количество теплоты ����, которое поступает от нагревателя мощностью �� за время �� – это просто интеграл по времени:
����(�� ) =![]()
![]()
Для того, чтобы понять сколько тепла ушло на улицу, необходимо воспользоваться понятием теплового потока ��0(t)– количество теплоты, проходящей через поверхность за единицу времени. Если считать, что теплопроводность внутри двух соприкасающихся сред больше, чем теплопроводность между ними, то тепловой поток пропорционален разности их температур:
��0(t)= - k(Ti (t)–T0)
��0(�� ) =![]()
![]() (Ti (t)–T0)dt
(Ti (t)–T0)dt
Запишем уравнение теплового баланса:
�� = ���� + ����
продифференцировав обе части по времени, можно записать дифференциальное уравнение, связывающее динамику изменения температуры ����(��) от мощности нагревателя:
����![]()
![]() = ��(���� − ����(��)) + ��(��)
= ��(���� − ����(��)) + ��(��)
Обозначив коэффициент ���� = a и разделив переменные для интегрирования, можно записать:
����(��)=![]()
![]()
![]()
![]() (��(���� − ����(��)) + ��(��)) dt
(��(���� − ����(��)) + ��(��)) dt
Последнее выражение – есть простейшая модель процесса теплообмена при отоплении помещения. Рассмотрим как осуществить моделирование этой системы с помощью Simulink.
Для создания модели в среде Simulink необходимо последовательно выполнить ряд действий.
Для начала необходимо создать новый файл модели с помощью команды File / New / Model, или используя кнопку на панели инструментов (здесь и далее, с помощью символа /, указаны пункты меню программы, которые необходимо последовательно выбрать для выполнения указанного действия). Вновь созданное окно модели показано на рисунке 5.
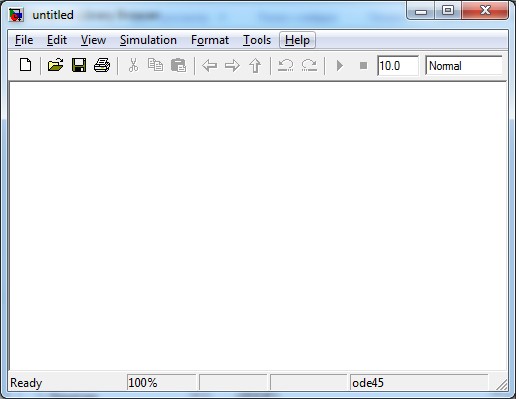
Рисунок 5- Пустое окно модели.
Далее расположим компоненты библиотеки Simulink в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки (например, Sources – Источники). Далее, указав курсором на требуемый блок и, нажав на левую клавишу мыши, перетащить блок в созданное окно модели. Клавишу мыши нужно держать нажатой.
Рассматривая дифференциальное уравнение модели, можно составить следующий список компонентов, которые изменяют сигналы модели:
∙ в модель необходимо ввести параметр ����, который в начале будет
константой – используем компонент библиотеки Simulink /Commonly Used Blocks / Constant или Simulink / Sources / Constant (это один и тот же компонент);
∙ чтобы получить разность температур ���� − ����(��) необходимо использовать сумматор (в режиме вычитателя) – компонент библиотеки Simulink / Commonly Used Blocks / Sum или Simulink /
Math Operations / Sum (также один и тот же компонент);
∙ для того, чтобы вычислить произведение разности температур на коэффициент �� ・ (���� − ����(��)), необходимо использовать блок
усилитель, поскольку такое произведение равнозначно усилению сигнала разности в �� раз ставим компонент библиотеки Simulink/ Commonly Used Blocks / Gain или Simulink / Math Operations/ Gain;
∙ чтобы получить сумму мощностей ��(���� − ����(��)) + ��(��) под интегралом необходимо использовать сумматор – компонент библиотеки Simulink / Commonly Used Blocks / Sum или Simulink /Math Operations / Sum;
∙ чтобы получить количество теплоты из суммы мощностей с помощью интегрирования
����(��)=![]()
![]()
![]()
![]() (��(���� − ����(��)) + ��(��)) dt
(��(���� − ����(��)) + ��(��)) dt
необходимо использовать интегратор – компонент библиотеки Simulink / Commonly Used Blocks / Integrator или Simulink / Continuous / Integrator;
∙ для формирования сигнала внутренней температуры ����(��) из интеграла мощности необходимо использовать блок усилитель, домножающий значение интеграла на 1/�� – компонент библиотеки
Simulink / Commonly Used Blocks / Gain или Simulink / Math Operations / Gain;
Кроме того, нам необходимо визуализировать зависимость ����(��), для этого мы используем осциллограф – компонент библиотеки Simulink / Commonly Used Blocks / Scope или Simulink / Sinks / Scope. А также мы задаем зависимость мощности от времени��(��) как единичный ступенчатый сигнал с помощью компонента библиотеки Simulink /Sources / Step.
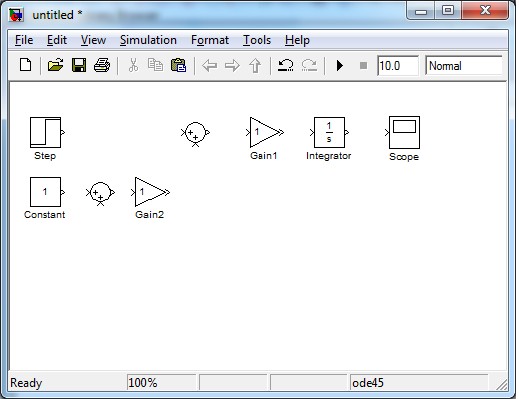
Рисунок 6- Окно модели, содержащее необходимые блоки
На рисунке 6 показано окно модели, содержащее установленные блоки.
Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу мыши), а затем нажать клавишу Delete на клавиатуре.
Для изменения размеров блока требуется выбрать блок, установить курсор в один из углов блока и, нажав левую клавишу мыши, изменить размер блока (курсор при этом превратится в двухстороннюю стрелку).
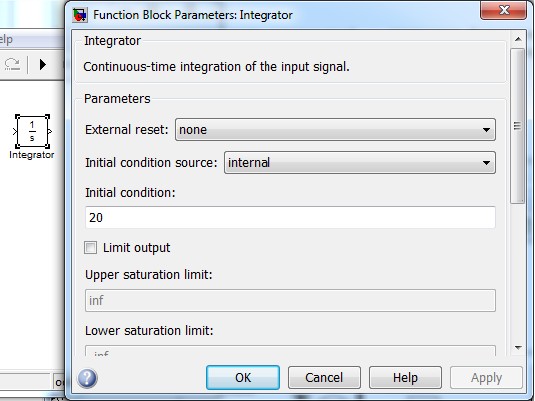
Рисунок 7- Блок, моделирующий интегратор и окно редактирования параметров блока
Следующий шаг – настройка параметров каждого блока. Для этого необходимо дважды щелкнуть левой клавишей мыши, указав курсором на изображение блока. Откроется окно редактирования параметров данного блока. При задании численных параметров следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. После внесения изменений нужно закрыть окно кнопкой OK. На рисунке 7 в качестве примера показаны блок, моделирующий интегратор и окно редактирования параметров данного блока.
В рассматриваемой модели необходимо установить следующие параметры блоков:
∙ блок Integrator: параметр Initial condition = 20 – интегрирование осуществляется с начальной температуры в помещении 20 градусов;
∙ блок Sum1 (нижний из двух сумматоров): List of signs = |+- – превращает сумматор в вычитатель;
Параметры �� и �� модели пока не будем задавать, положив �� = 1 и �� = 1. После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы с помощью сигналов.
Для соединения блоков необходимо указать курсором на выход блока, а затем, нажать и, не отпуская левую клавишу мыши, провести линию к входу другого блока. После чего отпустить клавишу. В случае правильного соединения изображение стрелки на входе блока изменяет цвет. Для создания точки разветвления в соединительной линии нужно подвести курсор к предполагаемому узлу и, нажав правую клавишу мыши, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре.
С целью удобства понимания модели, можно задать имена не только блокам, но и сигналам. Для этого необходимо дважды щелкнуть по сигналу и ввести имя. Обозначим сигналы, соответствующие переменным ��, ����, ����, P, To и Ti.
Схема модели, в которой выполнены все соединения между блоками и их настройка, показана на рисунке 8.
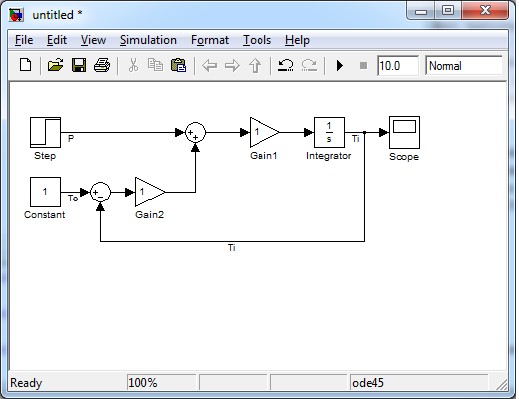
Рисунок 8- Окончательная схема модели.
После составления модели необходимо сохранить ее в виде файла на диске, выбрав пункт меню File/Save As... в окне схемы и указа папку и имя файла. При последующем редактировании схемы можно пользоваться пунктом меню File/Save. При повторных запусках программы Simulink загрузка схемы осуществляется с помощью меню File/Open... в окне обозревателя библиотеки или из основного окна MATLAB.
Запуск моделирования выполняется с помощью выбора пункта меню Simulation/Start или нажатием кнопки с треугольником (воспроизведение) на панели инструментов. Рядом в поле ввода указана продолжительность моделирования системы, по умолчанию моделирование останавливается при достижении модельного времени �� �������� = 10. Процесс расчета можно завершить досрочно, выбрав пункт меню Simulation/Stop или кнопку с квадратом (стоп). Расчет также можно остановить (Simulation/Pause) и затем продолжить (Simulation/Continue).
Запустим моделирование. После окончания, дважды щелкнем на блок осциллографа (Scope). На нем должна отображается зависимость ����(��)
(рисунок 9). Если графика не видно, то необходимо щелкнуть правой кнопкой по черной зоне и выбрать из меню Autoscale, что приведет к автоматическому масштабированию осей графика.
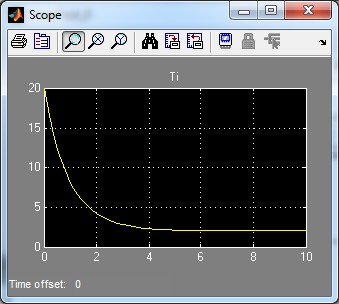
Рисунок 9- Результат моделирования при �� = 1.
Видно, что температура внутри падает от 20 градусов до температуры, которая выше уличной ���� = 1, моделируемой блоком Constant.
Таким образом сказывается действие нагревателя.
Установим в параметрах блока Step, моделирующего зависимость ��(��), большую мощность нагрева. Блок Step выдает на своем выходе константное значение, задаваемое его параметром Final value, и происходит это во время, задаваемое параметром Step time. До этого момента значение на выходе компонента Step равно 0. Установив параметр Final value = 10, запустим моделирование еще раз. Получим зависимость ����(��), показанную на рисунке 10.
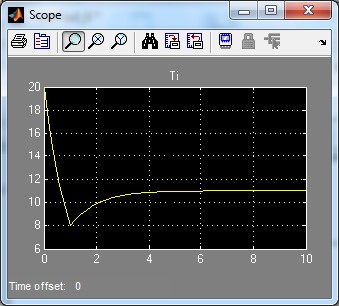
Рисунок 10- Результат моделирования при �� = 10.
Отчетливо видно, что температура падает до включения нагревателя при �� = 1, после чего растет до достижения постоянного значения, соответствующего термодинамическому равновесию между теплом, подводимым нагревателем и отводимым наружу.
Литература
1. А. Борисевич, Теория автоматического управления: элементарное введение
с применением MATLAB, Изд. МГУ, 2011г.
2. , ,
MATLAB В ИНЖЕНЕРНЫХ И НАУЧНЫХ РАСЧЕТАХ
Одесса «Астропринт» 2003
3. MATLAB 7.*/R2006/R2007 Самоучитель
Москва, ДМК, 2008
