


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ АВТОМАТИКИ.
Общие сведения. Системы автоматики состоят из ряда связанных между собой элементов обеспечивающих процесс управления:
получение первичной информации,
усиление сигналов информации,
преобразование их в управляющие сигналы и
воздействие на исполнительные механизмы.
В соответствии с выполняемыми функциями все элементы, составляющие автоматические системы, классифицируются на три самостоятельные группы:
а) измерительная, представляющая собой различного типа датчики;
б) преобразовательная, служащая для усиления информационного сигнала и преобразования его в другой, удобный для управления;
в) исполнительная, включающая в себя комплекс механизмов, осуществляющих управление.
Элементом может быть, резистор, конденсатор, трансформатор и т. д.
Все элементы любой группы имеют вход и выход. На вход поступает информация, форма которой преобразуется в другую, необходимую для дальнейшего движения и воздействия. Входная величина элемента обозначается через X, а выходная — через У.
Входной величиной элемента могут быть мгновенные значения физических величин (скорости, ускорения, давления, температуры, перемещения, освещенности, тока, напряжения и т. д.), амплитудные значения синусоидальных или импульсных электрических величин (тока или напряжения), частота физических величин и т. д.
Выходной величиной может быть электрический сигнал, различный по величине и характеру.
Входную величину обычно называют входным сигналом, а выходную — выходным сигналом.
Элементы, как и системы, могут работать в различных режимах.
Режим работы элемента при постоянных во времени входной и выходной величинах называют установившимся или статическим режимом. В установившемся режиме X (t) = const и У(t)=const.
Режим работы элемента при переменных во времени входной и выходной величин называют динамическим.
Статические параметры и характеристики.
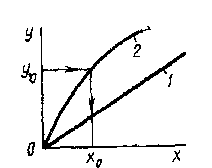
Зависимость выходной величины У от входной Х, выраженная математически или графически, называется статической характеристикой элемента У = f(Х)
Элементы, имеющие не зависящие от времени параметры и линейные статические характеристики, называются линейными, а имеющие нелинейные характеристики(2) — нелинейными элементами.
По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, то такой элемент называют источником первичной информации или датчиком.
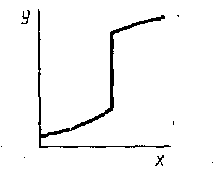
Если статическая характеристика элемента изменяется скачком, то такой элемент называется реле. В зависимости от природы входной величины X реле называются электрическими, тепловыми, оптическими: реле уровня, реле скорости, реле тока, реле напряжения и т. д.
Элементы для конкретных автоматических систем выбирают по коэффициенту передачи, порогу чувствительности, погрешности.
Коэффициент передачи элемента представляет собой отношение выходной величины элемента Y к входной величине X, т. К = Y/X.
У элементов с линейной статической характеристикой коэффициент передачи — величина постоянная, а у элементов с нелинейной — переменная, зависящая от X. Если входная и выходная величины элемента имеют одинаковую физическую природу одинаковые размерности, то коэффициент передачи называют коэффициентом усиления. Применительно к датчику коэффициент передачи называют также чувствительностью.
Порог чувствительности — это наименьшее значение входного сигнала, способное вызвать изменение выходного сигнала. Интервал между значением входного сигнала, не оказывающего воздействия на значение выходного сигнала, и оказывающего воздействия на значение выходного сигнала, называется зоной нечувствительности. Чем больше ЗН, тем хуже элемент.
Погрешность элемента появляется из-за неточной градуировки элементов в процессе их изготовления или в результате старения или износа.
В результате погрешности происходит отклонение характеристики элемента от заданной «идеальной» статической характеристики.
Различают абсолютную, относительную и приведенную погрешности.
Под абсолютной погрешностью элемента понимают разность между полученным Уп и действительным Y значениями выходной величины, т. е. Δ = УП—Y.
Действительное номинальное значение выходной величины — это идеальное значение выходной величины при отсутствии погрешности.
Абсолютная погрешность имеет размерности выходной величины. Она может быть положительной и отрицательной.
Относительная погрешность дает более полное представление о нестабильности статической характеристики. Она представляет собой отношение абсолютной погрешности к действительному значению выходной величины элемента, выраженной в относительных единицах или процентах:
δ0 = Δ/ Y. или δ0 = (Δ/Y) 100%, где Δ — абсолютная погрешность; У— действительное значение выходной величины элемента.
Приведенная погрешность. Под приведенной погрешностью понимают отношение абсолютной погрешности к разности предельных значений выходной величины, выраженной в относительных единицах или процентах, т. е
δ = Δ /( Умакс – Умин ) 100% , где Умакс и Умин— максимальное и минимальное значения выходной величины элемента; Δ — абсолютная погрешность.
При определении погрешности элемента выходную величину измеряют несколько раз, затем определяют среднее арифметическое выходной величины, которое принимается за тарировочное значение. Выбирают наибольшую разность между измеренным и тарировочным значениями Δмакс. Далее по формуле находят погрешность элемента: δ = Δмакс 100%/ Умин + δх + δу, где Δмакс — разность между измеренным и тарировочным значениями; Умин — значение выходной величины элемента; δХ и δУ — погрешности (приведенные) образцовых приборов, используемых для измерения входной и выходной величин элемента при тарировке.
Динамические параметры и характеристики.
В реальных системах автоматики сигналы от элементов меняются во времени. Такой режим называется динамическим.
Для оценки работы элемента в динамическом режиме используются динамические характеристики и параметры.
Процесс перехода элемента из одного установившегося состояния в другое называют переходным процессом. Так как во время переходного процесса Y изменяется, то переходный процесс, следовательно, является частным случаем динамического режима.
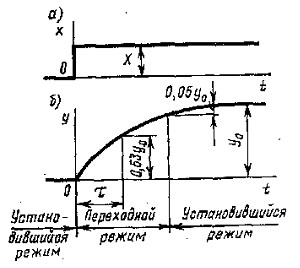
Переходный процесс характеризуется переходной характеристикой. Под переходной характеристикой понимают зависимость выходной величины от времени Y = f(t) при скачкообразном изменении входной величины. Реакция большинства элементов на скачкообразный входной сигнал т. е. их переходная характеристика представляет собой экспоненту.
Время от начала экспоненциального изменения выходной величины до момента, когда она достигает 63% установившегося значения выходной величины, называется постоянной времени элемента т.
Чем меньше т, тем круче будет переходная характеристика, тем меньше длительность переходного процесса и тем меньше инерционность элемента. При этом переходный процесс, называемый переходной характеристикой, определяется только свойствами элемента. Переходная характеристика позволяет выявить и оценить инерционность элемента.
При скачкообразном изменении входной величины X за счет инерционности элемента его выходная величина У достигнет нового установившегося значения не сразу, а только после окончания переходного процесса.
Различные элементы автоматики имеют различные графики переходных процессов. На рис. а показан переходный процесс без запаздывания, на рис. б — переходный процесс элементов, обладающих инерцией. Степень инерционности оценивается постоянной времени т.
В любой произвольный момент времени кривые X и У имеют разность ординат. Эта разность называется абсолютной динамической погрешностью элемента. У большинства элементов абсолютная динамическая погрешность после скачкообразного воздействия с течением времени не остается постоянной, и стремится к постоянному достаточно малому установившемуся значению.
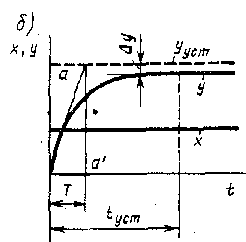
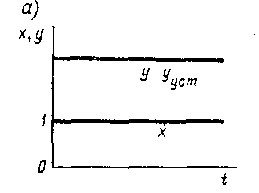
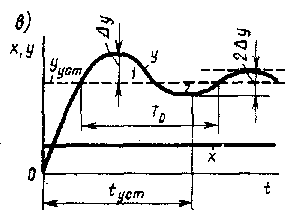
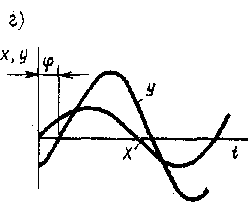
Рис. 5.4. Варианты графиков переходного процесса.
