


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
СИНТЕЗ И АНАЛИЗ СИСТЕМЫ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СТАБИЛИЗИРОВАННЫМ ВРАЩЕНИЕМ
Чан Ван Нам
Национальный исследовательский Томский политехнический университет, г. Томск
Научный руководитель: , доцент/ кафедра ИКСУ
Введение
Смоделированная система должна удовлетворять поставленным требованиям к качеству переходного процесса, а математические пакеты позволят быстро и точно определить качество системы, получить вид переходных процессов при различных воздействиях на систему, возмущениях, исследовать работу системы при изменении входных воздействий. Эти программы позволяют исследовать нелинейную систему, не проводя её линеаризацию. Таким образом, полученные в результате моделирования процессы близки к реальным процессам, происходящим в реальных физических системах.
Также поставлена задача исследования системы управления с наблюдающим устройством, который используется, когда оцениваемые величины труднодоступны для измерения. Решение поставленных задач будет основано на модальном синтезе систем управления.
Данные
Имеется объект управления: космический аппарат (Рис.1). Необходимо решить следующие задачи:
Записать модель в форме структурной схемы, передаточной функции и уравнений состояния; Синтезировать систему стабилизации аппарата по осям x и y в орбитальной системе координат, обеспечить заданную точность и качество переходного процесса (перерегулирования по выходной переменной у %, время переходного процесса (0.9-1.1) tп); проверить результаты моделированием;Jx=3000кгм2,
y=3000кгм2,
H=150 кгм2/с2
σ= 20 %,
tп=10 с.
Рисунок 1. Упрощенная модель космического аппарата
Измеряемые переменные - углы ориентации ц, ш относительно осей x и y и, при необходимости, угловые скорости корпуса.
Дополнительные требования к системе и процедуре проектирования использовать наблюдатель полного порядка.
Анализ исходной системы
1. Запись модель в форме структурной схемы
Рассмотрим упрощенную модель стабилизации космического аппарата относительно осей x и y. Управление осуществляется двумя газореактивными двигателями, создающими моменты относительно осей x и y.
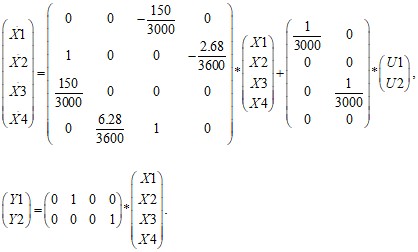
Упрощенная и линеаризованная модель космического аппарата может быть записана в виде:
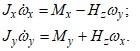
где: Jx, Jy - моменты инерции аппарата относительно осей х, у;
щx и щy - угловые скорости вращения аппарата относительно центра масс;
Hz - проекция вектора кинетического момента на ось z связанной системы координат;
Mx, My - внешние моменты, действующие на корпус космического аппарата.
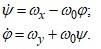
Тогда мы составим такую структурную схему модели (рис 2):
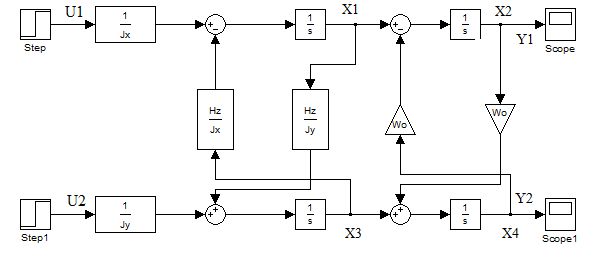
Рисунок 2. Структурная схема данной модели
2. Запись модели в форме уравнений состояния
Запишем модель космического аппарата в форме уравнений состояния:
(X) = (A)*(X) + (B)*(U),
(Y) = (C)*(X).
где: (X) – матрица-столбец переменных состояния;
(А) – квадратная матрица коэффициентов при переменных состояния;
(U) – матрица–столбец источников энергии;
(B) – прямоугольная матрица коэффициентов при источниках;
(Y) – матрица-столбец выходных величин;
(С) – прямоугольная матрица коэффициентов связи выходных величин с переменными состояния.
Из исходных значения переменных мы получили такую систему:
3. Запись передаточные функции данной модели
Передаточную матрицу найдем по следующей формуле.
![]()
Мы получили следующие передаточные функции:
![]()
![]()
![]()
![]()
Получено характеристическое уравнение:
![]()
С помощью пакета программ MATHCAD рассчитаем корни уравнения:
S1= 0.001744*j,
S2=-0.001744*j,
S3= 0.05*j,
S4= -0.05*j.
Все корни расположены на мнимой оси, что говорит о том, что система находится на границе устойчивости.
Модальный синтез системы
1. Определение коэффициентов обратных связей
Вектор состояния объекта считаем доступным измерению. Рассмотрим закон управления вида U(t)=-KX(t). Здесь: К – подлежащая определению матрица коэффициентов регулятора. Замкнутая система «объект-регулятор» (Рис.3) описывается уравнением ![]() . Ставится задача определения коэффициентов регулятора (элементов матрицы К) таких, чтобы характеристический многочлен
. Ставится задача определения коэффициентов регулятора (элементов матрицы К) таких, чтобы характеристический многочлен ![]() имел заданные коэффициенты. Так как система симметричная, то коэффициенты расставляем согласно рис. 3.
имел заданные коэффициенты. Так как система симметричная, то коэффициенты расставляем согласно рис. 3.
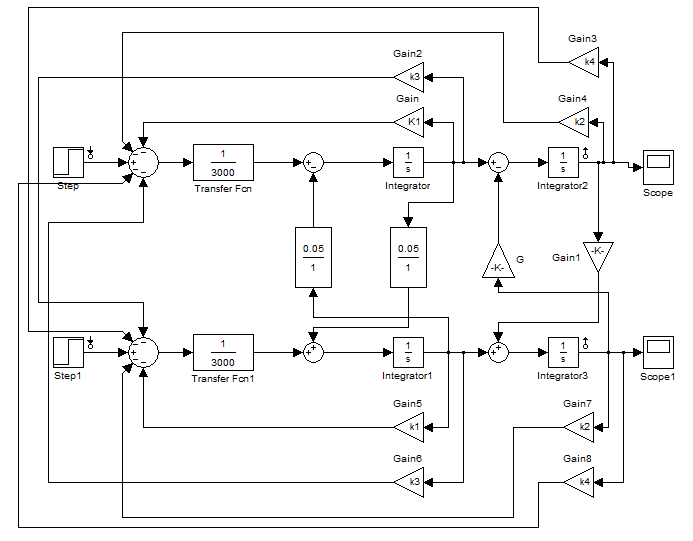
Рисунок 3. Замкнутая система «объект-регулятор»
Получили следующие значения коэффициентов, которые необходимо включить в обратные связи системы для получения желаемого качества системы.
K1 = 2100, K2 = 1620, K3 = 450, K4 =68.
2. Проверка результатов моделированием
Для проверки правильности вычислений соберем систему (Рис.3) в программе MATLAB, подставив полученные значения коэффициентов и рассмотрим качество получившегося процесса. На рис. 4 приведены получившиеся переходные процессы.
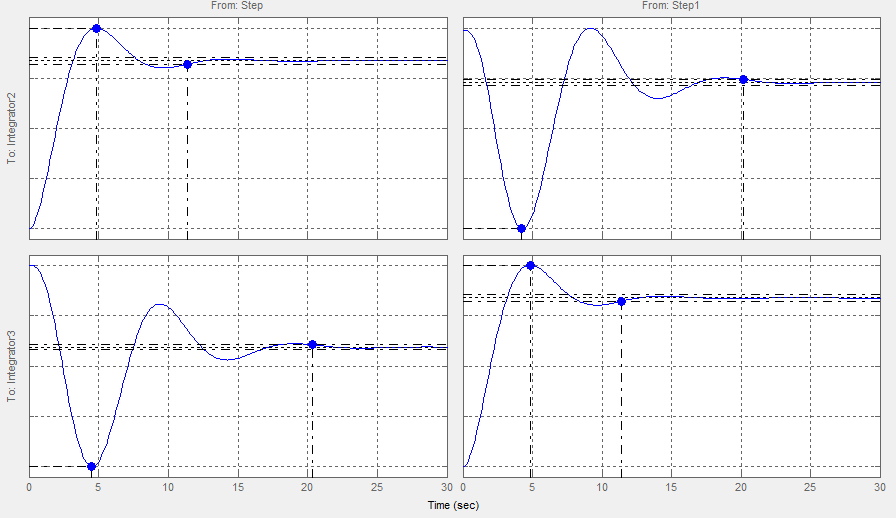
Рисунок 4. Переходные процессы
Получены следующие параметры системы
- время регулирования 11.4 с; перерегулирование 19.5%;
- полюса системы: p1 = -0.421+0.622j, p2 = -0.421 -0.622j,
p3 = -0.35+0,622j, p4 =-0.35-0.622j.
Смоделированная система удовлетворяет требованиям к качеству переходного процесса.
Заключение
В процессе выполнения работы перед нами стаяла задача исследования объекта, используя модальный синтез на основе методов модального управления, т. е. методов обеспечивающих заданное качество САУ путем желаемого размещения полюсов системы на комплексной плоскости. Практически, для закрепления знаний, исходную модель объекта представляли в форме уравнений состояния и в виде передаточной функции.
Список литературы
Проектирование и исследование системы управления динамическим объектом (методические указания к выполнению курсовой работы). - Томск: Ротапринт ТПУ, 2002 , Задачник по теории автоматического регулирования. – М.: Машиностроение, 1977. – 592 С. , Теория систем автоматического регулирования. – 3-е изд., испр. – М.: Наука, 1975. – С. 768 , Избранные главы теории автоматического управления. – СПб.: Наука, 1999