Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
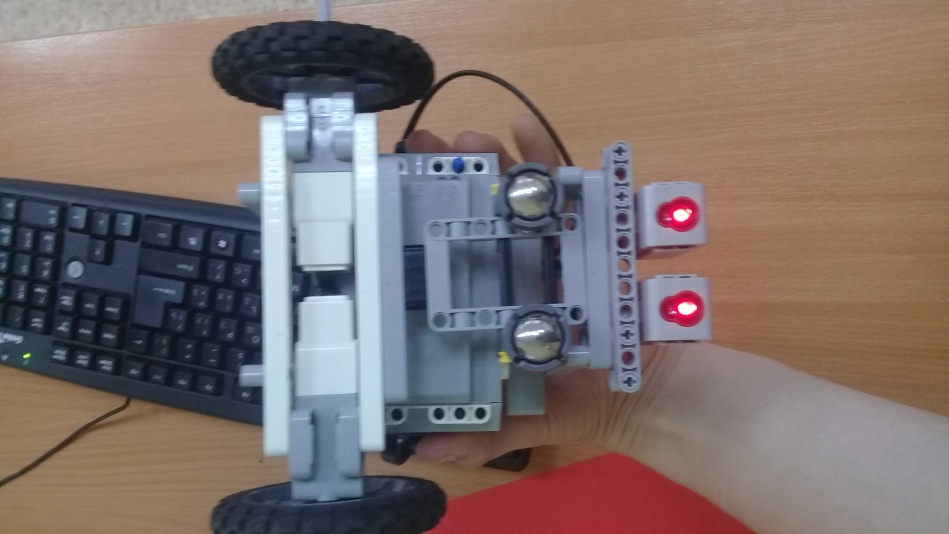
Описание робота для участия в соревновании в категории «Следование по узкой линии образовательные конструкторы».
Видео с прохождением робота было записано на линии, длина которой равна 5 метрам, толщина15мм. Робот проехал 3 круга, то есть 15 метров за 31 секунду. Ссылка на видео https://youtu. be/plHyEwcgWRs
1. Робот создан на базе робототехнической платформы Lego Minstorms EV3. Для программирования робота была выбрана среда программированияSmall Basic
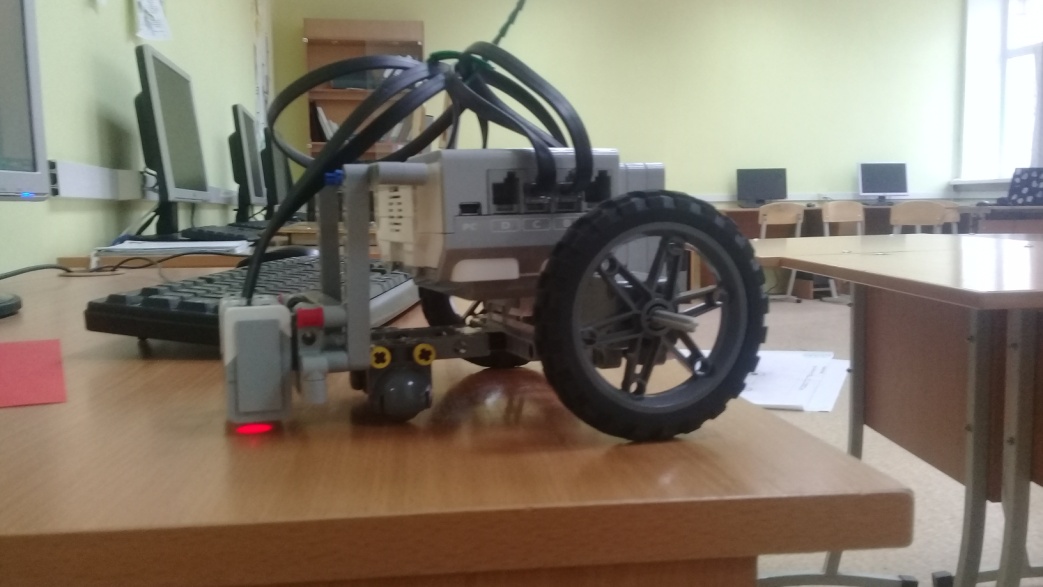
2. Робот достаточно компактный и входит в установленные габариты, предъявляемые к соревнованиям. Для передвижения робота были использованы два колеса, а для большей устойчивости для третьей и четвертой точки опоры - две шаровые опоры. Конструкция имеющая 4 точки опоры имеет следующие преимущества: компактность, возможность развить большую скорость, устойчивость при езде на большой скорости (особенно на поворотах. Для следования по линии использовались 2 датчика цвета (используется режим освещенности). Для управления роботом в конструкции использовался один блок EV3. Для передвижения по линии и крепления колес, были использованы два средних мотора. Движение моторов осуществляется на максимальной мощности.
3. Робот выполняет поставленную задачу стабильно.
4. Робот предназначен для езды по узкой линии, для этого в программе был использован ПИД-регулятор, подобраны соответствующие коэффициенты так, что робот едет стабильно.