
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.05.017 (Караганда, КарГТУ)
(Караганда, КарГТУ)
АСНИ РОБОТА «МАНИПУЛЯТОР-ТРИПОД»
Кафедрой автоматизации производственных процессов (АПП) КарГТУ был приобретен лицензионный пакет среды графического программирования LabVIEW. В данной среде возможно создание прикладного программного обеспечения для взаимодействия с измерительной и управляющей аппаратурой сбора, обработки и отображения информации и результатов расчетов, моделирования как отдельных объектов, так и автоматизированных систем в целом. LabVIEW с аппаратным обеспечением, позволяет построить лабораторно-практический комплекс для мониторинга физических координат объектов исследования (машин, механизмов, установок, робототехнических устройств), с последующим их анализом, оценкой, идентификацией свойств и характеристик.
В среде LabVIEW разработан комплекс лабораторных работ, посвященный стенду «Следящий электропривод FESTO» [1].
В настоящей работе стоит задача расширить данное методическое обеспечение, связав его с одной из разработок кафедры АПП – роботом «Манипулятор-трипод» и исследовать статические и динамические режимы в АСНИ LabVIEW [2].
На рисунке 1 представлена функциональная схема автоматического контроля робота «Манипулятор-трипод» в среде LabVIEW.
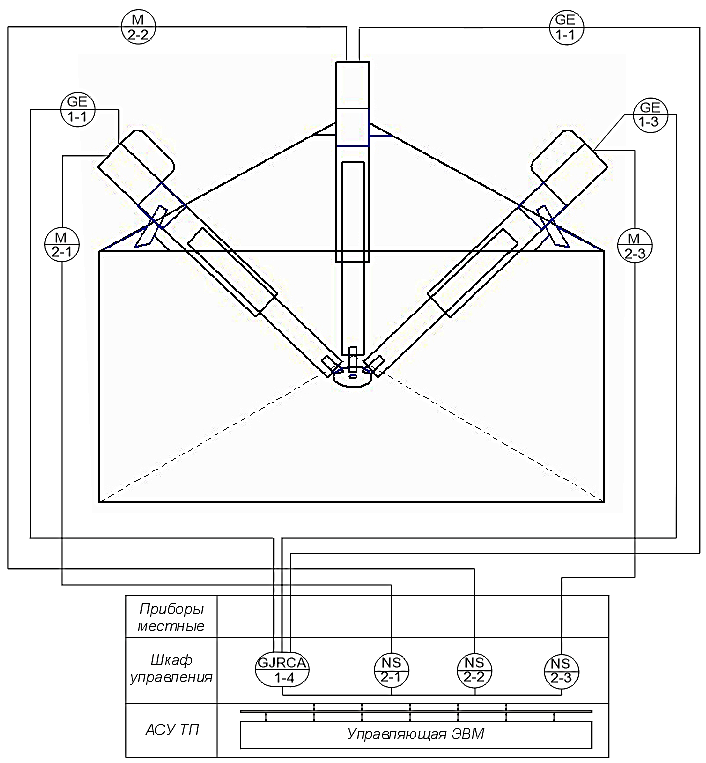
Рисунок 1 – Функциональная схема робота «Манипулятор-трипод»
Система управления и контроля подразумевает слежение за динамикой перемещения штоков робота в реальном времени с корректирующими вмешательствами для их изменения и нормализации. Для этого требуется выполнение следующих основных задач:
- анализ сигналов с оценкой их характеристик и результатов в реальном времени;
- включение/выключение регистрации сигналов и изменения длительности АСНИ в ответ на внешние события;
- подача тестовых сигналов на вход манипулятора;
- мониторинг состояния робота с выдачей предупредительных сигналов при его отказах, аварийных ситуациях или отклонениях от штатных режимов работы;
- конструирование и использование виртуальных приборов (virtual instruments) [4].
Эксперимент будет проводиться в среде графического программирования LabVIEW и это позволит дополнить методическое обеспечение, созданное ранее, лабораторными работами:
- №8 «Идентификация робота как объекта управления в активном режиме при действии входных ступенчатых воздействий»;
- №9 «Идентификация робота как объекта управления в пассивном режиме при действии стохастических воздействий».
Список использованной литературы:
1. , Разработка программного обеспечения в среде LabVIEW для учебного стенда FESTO //Научно-технический журнал «Автоматика. Информатика», №2 (31). Караганда: издательство КарГТУ, 2012. – С. 25-28.
2. , Разработка программно-аппаратного комплекса «Манипулятор-трипод //Научно-технический журнал «Автоматика. Информатика» №2 (37). Караганда: издательство КарГТУ, 2015. – С.30-34
3. АСНИ электропривода и системы управления робота «Манипулятор-трипод» в программной среде LabVIEW
4. Компьютерный контроль и анализ сигналов. – М.: Информатика и компьютеры, 1999. – 330с., ил.
