

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Мобильный робот собран на шести колёсной платформе с торсионной подвеской передней колёсной пары. Оставшиеся две пары колёс жёстко прикреплены к корпусу. Все колёса приводятся в движение 12 вольтовыми электродвигателями с редукторами. Каждое колесо имеет собственный привод. На корпусе робота установлена аналоговая видеокамера и передатчик для осуществления телеуправления. Инфракрасный дальномер используется для автономного захвата банки-маяка. Схват-манипулятор изготовлен при помощи 3D печати и приводится в движение сервомоторами. Также планируется использование датчиков света для автономного движения по линии. Микроконтроллером, на котором построено управление системами робота является ARDUINO MEGA 2560. Драйверы двигателя BTN 7960B. Питание LI-PO аккумулятор. Для пилотирования будет использоваться пульт для дистанционного управления радиомоделями. 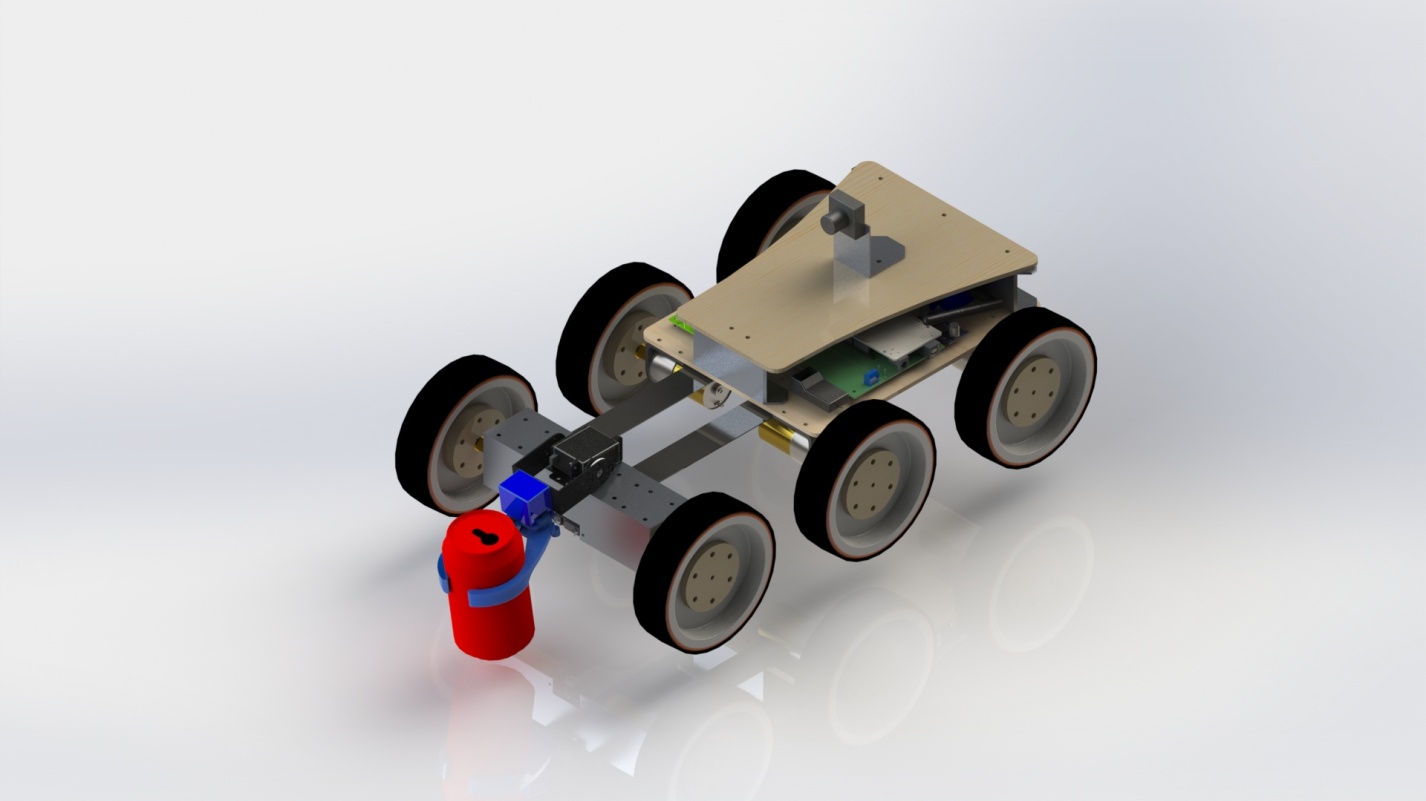
Размеры робота:
длинна 480мм;
ширина 301мм;
высота 205мм;
диаметр колёс 130мм.
Команда принемает участие в соревнованиях первый раз.
