
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Первые шаги в Lego - конструктор
Межтерриториальная научно-практическая конференция работ учащихся «Грани науки - 2017»
Технологическое направление
(робототехника)
ПЕРВЫЕ ШАГИ В LEGO - КОНСТРУКТОР
Работу выполнил:
Михалев Фёдор, 5А класс,
МАОУ «СОШ с УИОП» №5
Руководитель:
, учитель технологии
МАОУ «СОШ с УИОП» №5
2017 г.
Содержание
Введение. 3 стр. Цель и задачи проекта. 4 стр. История LEGO – конструктора. 5-7 стр. Какие бывают роботы. 8-9 стр. Части робота EV3. 10 стр. Практическая часть. 11 стр. Заключение. 12 стр. Список используемой литературы. 13стр. Приложение 1. История LEGO-конструктора в лицах. 14 стр. Приложение 2. Виды роботов. 15 стр. Приложение 3. Части робота EV3. 16 стр. Приложение 4. Практическая часть. 17 стр.Введение
В ноябре 2016г. я начал заниматься в секции «Робототехника» LEGO роботом Mindstorms EV3 в центре дополнительного образования. Мне очень понравилось собирать робота, программировать его и соревноваться с другими ребятами, у кого робот точнее проедет по точкам. Эти пол года мы программировали собранных роботов и изучали датчики. В настоящее время мы собираем и программируем робота – чертежника. Я использовал несколько инструкций для сбора этого робота, что-то придумывал сам. Я собрал робота сразу с подъёмом маркера. Робот, конечно, неровно передвигается по точкам. Это зависит от многого: от того, как поставишь робота, какой заряд энергии, прокручиваются колёса или нет и многое другое.
Гипотеза – все большие изобретения, начинаются с простого конструирования.
Тема моего проекта будет иметь познавательное значение, так как мало кто знает, откуда произошел LEGO – конструктор, кто ввёл в употребление значение слова «Робот», где и когда возник первый робот. Поэтому мне и захотелось изучить эту тему и рассказать другим. Использование моей модели робота на уроках робототехники.
Цель и задачи проекта
Целью моего исследовательского проекта является – изучение основ робототехники и создание действующей модели программируемого «Робота Чертёжника»
Задачи:
Ознакомиться с историей создания LEGO – конструктора. Изучить основные механизмы и части LEGO – конструктора. Продумать концепцию и конструкцию модели «Робота Чертёжника». Собрать модель этого робота. Создать программу для пробного рисунка. Апробировать собранную модель «Робота Чертёжника».История LEGO – конструктора
В 1932 г. Оле Кирк Кристиансен (см. приложение 1.1) основал свою компанию, которая начинала с производства стремянок, гладильных досок и деревянных игрушек. Его сын Готфрид Кирк Кристиансен (см. приложение 1.2) принимал участие в бизнесе отца с 12 лет.
В 1934 г. появилось на свет слово LEGO, которое образовалось от выражения "LEg GOdt", что в переводе с датского означает "увлекательная игра". В настоящее время LEGO - название компании и ее продукции. Позднее было установлено, что в переводе с латыни данное выражение означает "я учусь", "я складываю".
В то время в компании трудилось 7 человек. Спустя несколько лет на стене цеха появился лозунг, придуманный Оле Кирком: "Только лучшее является достойным".
В 1936 г. прайс-лист включал в себя 42 модели. Самой дорогой из них был грузовой фургон, цена которого составляла 36 датских крон.
В 1942 г. фабрика LEGO сгорела дотла. Однако, несмотря на это, производство деревянных игрушек было вскоре возобновлено.
В 1943 г. в биллундской компании работало почти 40 служащих.
В 1944 г. компания преобразовалась в семейную компанию с ограниченной ответственностью и стала называться "LegetOjsfabrikken LEGO Billund A/S" ("Биллундская фабрика игрушек LEGO с ограниченной ответственностью").
В 1947 г. .LEGO стала первой компанией в Дании, которая приобрела машину, отливавшую формы из пластика для изготовления игрушек (ее цена равнялась примерно 30.000 датских крон).
В 1949 г. компания произвела на свет около 200 различных пластиковых и деревянных игрушек, включая легкосоединяемые строительные элементы, которые являлись предшественниками кубика LEGO. Они продавались исключительно в Дании.
В то время на фабрике трудилось около 50 служащих.
В 1950 г., в день своего тридцатилетия, Готфрид Кирк Кристиансен был назначен младшим директором компании LEGO.
В 1952 г. в компании работало около 140 человек.
В 1953 г. легкосоединяемые строительные элементы были переименованы в "LEGO Марстен" (кубики LEGO).
В этом же году в Билланде было основано литейное производство.
В Норвегии начали выпускать продукцию LEGO, включая легкосоединяемые элементы LEGO, арендовав специальные отливочные формы для изготовления игрушек из пластика.
1 мая 1954 г. название "LEGO" было официально зарегистрировано в Дании.
В 1955 г., после того как кубики LEGO утвердились на рынке, компания выпустила Систему игры LEGO, состоящую из 28 наборов и 8 транспортных средств, которая произвела настоящую сенсацию. В продажу также поступили отдельные элементы.
В этом же году пластиковые игрушки и Система игры LEGO были отправлены на экспорт в Швейцарию.
В 1956 г. в Хохенвестедте (Германия) была основана первая иностранная торговая компания LEGO.
В 1957 г. компания LEGO отметила свой двадцатипятилетний юбилей, и Готфрид Кирк Кристиансен был назначен ее директором-распорядителем.
В 1958 г. была изобретена и запатентована система соединения строительных элементов для кубиков LEGO, благодаря которой штырьки и перемычки стали прочнее крепиться друг к другу. Эта система позволила собирать более прочные и точные модели из конструктора LEGO. Также были разработаны кубики с покатыми гранями в виде крыши.
В 1967 г. был изобретен кубик Лего ДУПЛО, предназначенный специально для самых маленьких строителей, его размер в несколько раз больше обыкновенной детали Лего. Эта серия существует и по сегодняшний день.
В конце 1968 года Лего преподнес настоящий подарок всем любителям конструктора. В этом году был построен первый в мире Legoland Биллунд – парк развлечений, практически полностью собранный из кубиков Лего. Это самый крупный Леголенд в мире, состоящий в общей сложности из более 46 миллионов кубиков LEGO различных размеров. По площади парк занимает примерно 100 000 кв. метров. Ежедневно LEGOLAND Биллунд посещают 27 648 человек.
В настоящее время конструктор - LEGO производится не только в Дании, но и в Великобритании, Китае и США.
С момента своего появления в 1998 году LEGO Mindstorms выпускает компоненты и набор программ для робототехники.
В течение последних 15 лет развивается глобальное сообщество поклонников Lego Robotics.
1986: Выпущен первый управляемый компьютером набор LEGO.
1988: Начало сотрудничества между LEGO Group и MTI (Массачусетского технологического института).
Январь 1998 года: Выставка в Музее современного искусства в Лондоне.
Ноябрь 1998: Запущен FIRST LEGO League, конкурс по робототехнике для учащихся средних школ. В пилотном турнире в Музее науки и промышленности в Чикаго участвовало 200 студенческих команд.
Компания Лего в 2010 году объявила об успешном испытании робота "Лего" серии "Лего Майндстормс" на Международной космической станции (МКС). Космонавты провели испытание робота " Джиттер ", предназначенного для сбора предметов, находящихся в невесомости внутри МКС. Его главной задачей стал сбор предметов, парящих в невесомости внутри МКС, таких, например, как кассеты с фотопленкой. Робот ориентируется по свету ламп на потолке МКС с помощью светового сенсора и движется на колесах, установленных на трех осях. Натолкнувшись на стену, робот продолжает движение вдоль нее.
Апрель 2005: Первый чемпионат мира FIRST LEGO League в Атланте (США, штат Джорджия).
Август 2009: Выпущена платформа LEGO Mindstorms NXT 2.0.
Январь 2013: На международной выставке Consumer Electronics Show отмечается 15 - летие LEGO MINDSTORMS и объявлено о платформе следующего поколения - LEGO MINDSTORMS EV3.
Сентябрь 2013: LEGO MINDSTORMS EV3 доступно по всему миру.
Всё начиналось с деревянных игрушек, а теперь роботы служат на благо человечества, что и доказывает нашу гипотезу.
Какие бывают роботы
Робототехника — наука, занимающаяся прикладной разработкой автоматизированных технических систем. Слово «робототехника» (в его английском варианте «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году. Робот (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма. Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
«Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.» , . «Робототехника: История и перспективы»
Роботы служащие на благо человечества:
- Робот-гуманоид - человекообразный робот — машина, корпус которого сделан по прототипу человеческого тела. Таких роботов создают с определенными экспериментальными целями: освоение прямохождения, изучения влияния на организм определенных нагрузок и тд. У такого робота всегда есть туловище, голова, руки и ноги. Хотя в некоторых моделях нижние конечности заменены колесами (см. приложение 2.1). Промышленные роботы - массовое появление роботов и использование их в производственных процессах — вполне логично объяснимый факт. В 70-х гг. первые роботы начали работать с ЧПУ-станками. Их работоспособность значительно превышает человеческую, а значит и продуктивность в разы выше. Роботы выполняют свои задачи 24 часа, без перерывов (см. приложение 2.2). Бытовой робот - самый приятный глазу среднестатистического обывателя робот. Первый помощник в уборке помещений, секретарь и справочное бюро в одном «железном теле». Роботы запрограммированы на выполнение конкретных действий без человеческого вмешательства. Первыми изготовили бытового робота-пса AIBO разработчики компании Sony (см. приложение 2.3). Роботы-агенты безопасности - государственные силовые структуры довольно часто прибегают к использованию в своей опасной работе настоящих роботов. Машины-разведчики, беспилотники, подводные поисково-спасательные машины (см. приложение 2.4). Боевые роботы - роботы часто бывают внедрены в особо экстремальные ситуации из жизни человека или боевые действия. Во время войн роботы справляются с задачами разведки, разминирования и боя, спасая сотни человеческих жизней. Они уверенно действуют как на земле, так и в воздушном пространстве (см. приложение 2.5). Роботы-исследователи. Помимо всего прочего, миру известны и случаи научных открытий, сделанных роботами. К таким «механическим ученым» можно отнести Адама и Еву — роботов, созданных в 2009 году в рамках проекта Robot Scientist (см. приложение 2.6).
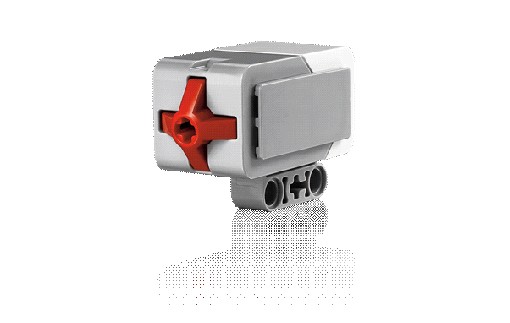
Части робота EV3 Мозг робота – основная часть здесь робот принимает информацию от датчиков и посылает команды моторам (см. приложение 3.1). Большой мотор - в наборе находиться два таких мотора, они служат для передвижения робота и в других целях (см. приложение 3.2). Средний мотор – менее мощнее и поменьше, чем большой мотор, обычно используется для подъёма части робота (см. приложение 3.3). Ультразвуковой датчик – измеряет расстояние до объекта, который он видит (см. приложение 3.4). Цветовой датчик – определяет цвета и освещенность (см. приложение 3.5). Датчик касания – касается объекта и сообщает мозгу (см. приложение 3.6). Гироскопический датчик – измеряет углы поворота (см. приложение 3.7). Конструктор – держит части робота (см. приложение 3.8).
Практическая часть
Изучив составные части робота LEGO Mindstorms EV3 и механизмы конструирования, я приступил к созданию своей модели «Робота - Чертёжника».
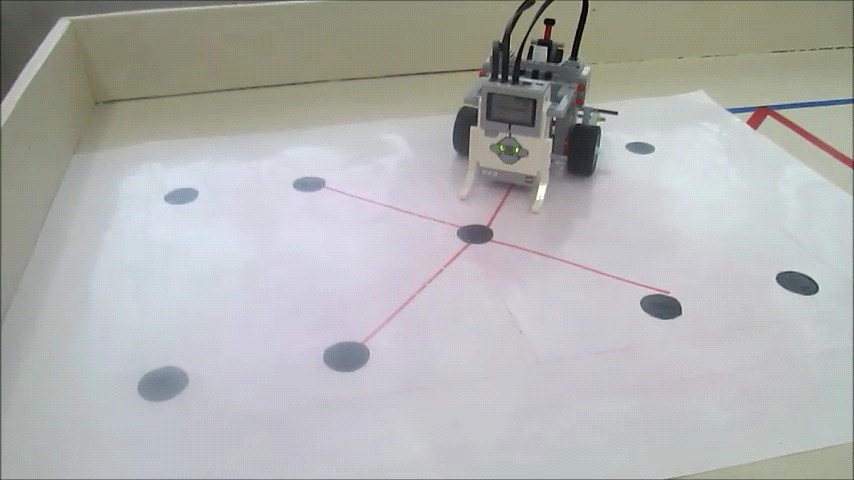
Целью создания моего робота является то, что в конечном итоге, он должен начертить крестик.
В основу конструкции моего робота, я взял инструкцию «Робота - БОТА», которую нашёл в интернете.
Сборку робота я начал с ходовой части, которую решил собрать на колёсах (см. приложение 4.1). Затем необходимо было продумать, как смоделировать захват для маркера. Для этого опытным путём я изменял захват от «Робота - БОТА», так что бы он прочно держал маркер.
Когда у меня, наконец-то, получился надёжный захват
(см. приложение 4.2), встал вопрос: «Как сделать так, что бы захват поднимался и опускался?». Присоединив к захвату средний мотор и механизм подъёма, он стал опускаться и подниматься. Затем соединил ранее собранные части с захватом (см. приложение 4.3).
Программируя, испытывая своё творение, я потихоньку шёл к своей поставленной цели (см. приложение 4.4).
Методом проб и досадных ошибок, у меня всё получилось!
Заключение
В результате работы над проектом, я узнал историю возникновения LEGO-конструктора, LEGO-робота Mindstorms, изучил детали, из которых может состоять робот и механизмы из соединения деталей и создал действующую модель программируемого «Робота Чертёжника».
Моя модель успешно проходит апробацию на занятиях по робототехники. Я представляю свою работу и показываю как постепенно шаг за шагом я учусь конструировать и программировать сложные модели роботов, тем самым подтверждая нашу гипотезу.
На следующих занятиях по робототехнике я собираюсь усовершенствовать моего «Робота Чертёжника» и начну создавать «Робота Сумоиста».
Не только учёные работают над созданием роботов, но и даже подготовишка может сконструировать и запрограммировать робота. Каждый может записаться на кружок робототехники, создать действующего робота и усовершенствовать его. Не обязательно создавать робота для науки, но можно и для развлечения.
Список используемой литературы https://otvet. mail. ru/question/90723275 - история. http://hawkish. ru – факты. https://hsl. guru/chto-takoe-robot/ - какие бывают роботы.
Приложение 1
История LEGO-конструктора
Оле Кирк Кристансен

2. Готфрид Кирк Кристансен

Приложение 2
Основные виды роботов
1. Робот – гуманоид 2. Промышленный робот


3. Бытовой робот 4. Робот – агент безопасности



5. Боевой робот 6. Робот – исследователь

Приложение 3
Части робота EV3

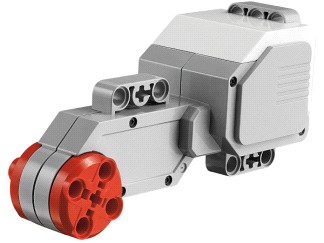
1. Мозг робота 2. Большой мотор


3. Средний мотор 4. Ультразвуковой датчик
5. Цветовой датчик 6. Датчик касания



7. Гироскопический датчик 8. Конструктор
Приложение 4
Практическая часть
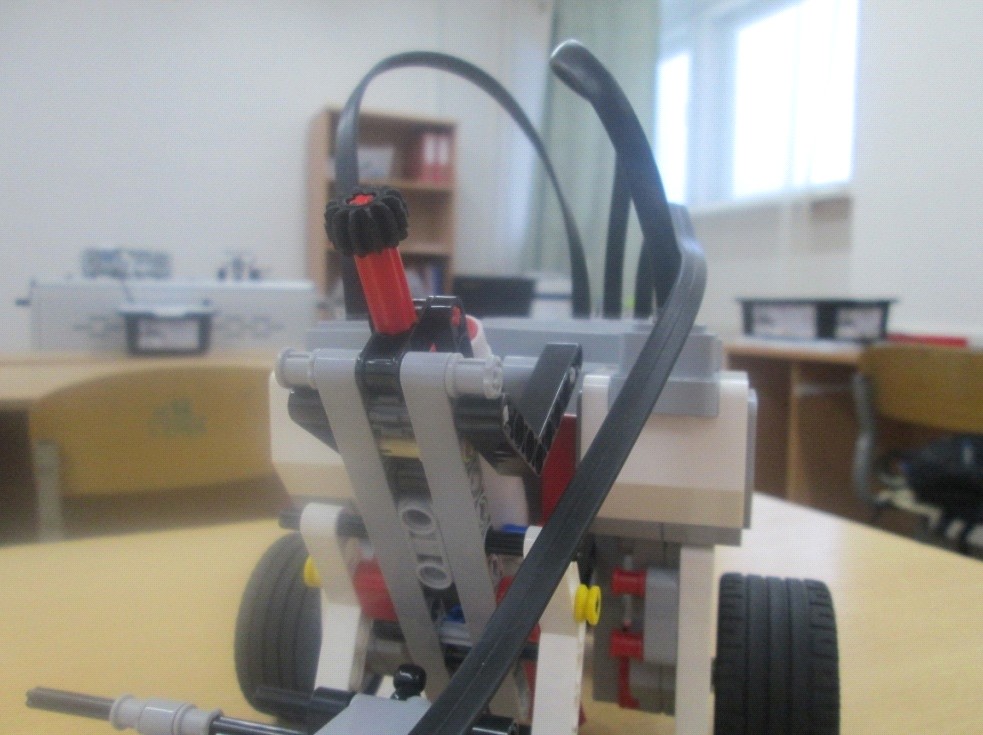

1. Ходовая часть 2. Захват маркера
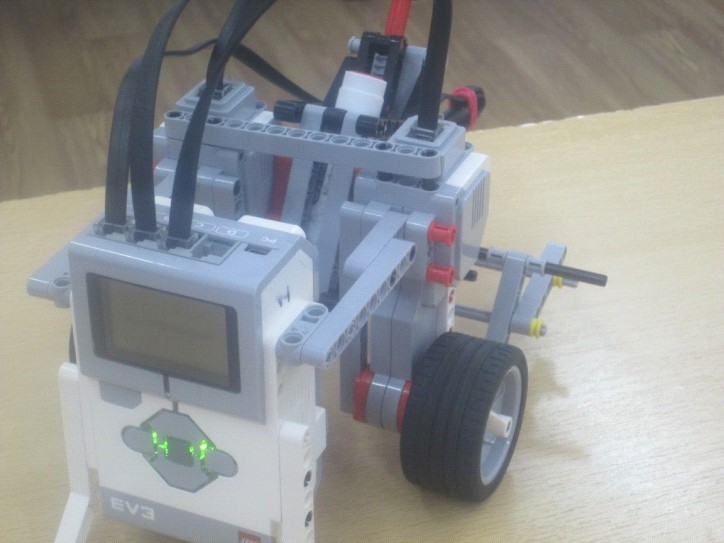
3. Робот
4. Чертёж
