
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 34.06.:656.826:656.136
Обоснование показателей тормозных свойств седельных автопоездов в горных условиях эксплуатации (на примере перевала «Тоо-Ашуу») |
О. Т. ШАТМАНОВ1, д. т.н., профессор, Директор Института транспорта и коммуникаций, |
Ключевые слова: седельный автопоезд, тормозная система, устойчивость движения, антиблокировочная система (АБС), вписываемость, модулятор давления, маневренность.
А
втопоезда, эксплуатируемые в горных условиях перевала «Тоо-Ашуу» и перевозящие нефтепродукты, должны иметь рабочую, запасную, стояночную и вспомогательную тормозные системы.
Вспомогательная тормозная система новых автомобилей должна без применения иных тормозных систем обеспечить движение со скоростью V = 30 ± 2 км/ч на уклоне 7% протяженностью 6 км, а для автомобилей полной массы, находящихся в эксплуатации при V = 30 ± 5 км/ч, должно быть обеспечено jуст ≥ 0,5 м/с2 и для автомобилей в снаряженном состоянии jуст = 0,8 м/с2.
Тормозные системы седельных автопоездов, кроме обеспечения минимального тормозного пути, должны гарантировать устойчивость движения в процессе торможения. Причем последнее во многих случаях оказывается более важным, чем достижение минимального пути.
Одним из эффективных способов повышения безопасности движения является применение высокочувствительных быстродействующих автоматических антиблокировочных систем, включаемых в тормозную систему.
Тормозная система с АБС работает в циклическом режиме торможения и оттормаживания колеса. Изменение давления рабочей среды в колесном тормозном цилиндре зависит от характеристик всех звеньев тормозной системы автомобиля и дорожных условий.
Регулирование давления в колёсных цилиндрах осуществляется с помощью модуляторов давления. На рисунке 1 приведена схема модулятора давления.
Принцип модуляции можно представить в виде:
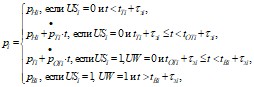 (1)
(1)
где рHi – начальное давление в пневмоприводе;
рTi – максимальное давление фазы торможения;
рBi – давление при фазе выдержки;
рTi, рOTi – изменение давления при торможении и оттормаживании;
tTi – продолжительность фазы торможения;
tOTi – продолжительность фазы оттормаживания;
tBi – продолжительность фазы выдержки;
фзi – время запаздывания привода.
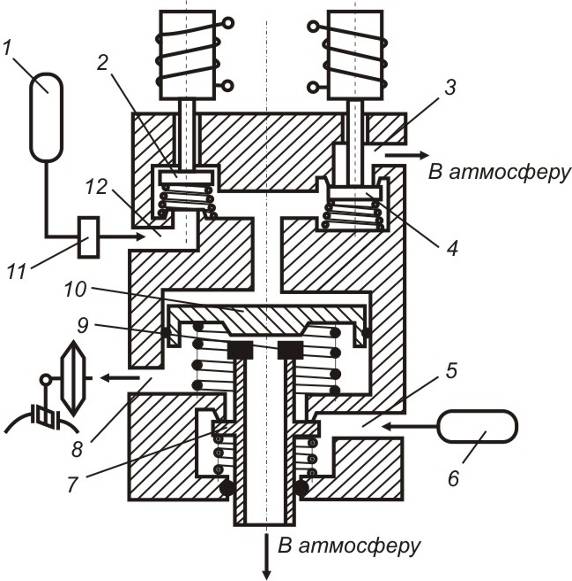
1 – основной ресивер; 2, 4 – управляющие клапаны;
3, 5, 8 и 12 – каналы; 6 – дополнительный ресивер;
7 – клапан сжатого воздуха; 9 – атмосферный клапан;
10 – поршень; 11 – тормозной кран
Рисунок 1 – Модулятор давления
Рассматривается процесс торможения автомобиля в циклическом режиме с помощью зависимости коэффициента сцепления i-го колеса с дорогой цi от коэффициента проскальзывания Ski, построенной при заданной нормальной реакции Rzi(i = 1…12). Эту зависимость можно представить в виде
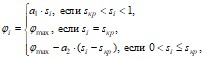 (2)
(2)
где a1, a2 – угол наклона «ц – s» диаграммы до и после критической зоны;
sкр – критическое проскальзывание колеса;
цmax – максимальный коэффициент сцепления колеса с опорной поверхностью.
Уравнение динамики равновесия моментов, действующих на колесо относительно оси его вращения при торможении, имеет вид:
![]() (3)
(3)
где МTi – тормозной момент i-го колеса;
Jki – момент инерции i-го колеса.
![]() (4)
(4)
Замедление колеса:
Замедление автомобиля описывается уравнением:
![]() (5)
(5)
где ma – масса автомобиля.
Характеристика тормозного момента МTi на режиме торможения описывается полиномами 2-й степени, на режиме оттормаживания-полиномами 3-й степени:
![]() (6)
(6)
где аTi – коэффициенты регрессии зависимости МT = f (pi) при торможении;
aOTi – коэффициенты регрессии той же зависимости при оттормаживании;
pi – давление воздуха в колёсном тормозном цилиндре, определяется из характеристик пневматического тормозного привода.
Работа тормозного привода с АБС в режиме циклического регулирования тормозного момента определяется последовательным чередованием фаз торможения и оттормаживания, время переходных процессов которых зависит от параметров сигналов управления электронно-решающего блока (ЭРБ) АБС.
Релейные сигналы USi, UWi, вырабатываемые ЭРБ на сброс, выдержку и повышения давления, можно представить как:
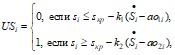 (7)
(7)
 (8)
(8)
где ![]() – скорость изменения проскальзывания колеса, Vki – скорость i-го колеса;
– скорость изменения проскальзывания колеса, Vki – скорость i-го колеса;
![]() (9)
(9)
![]() (10)
(10)
ширина зоны нечувствительности при коррекции в до и после критической области; MTi – скорость изменения тормозного момента; k1, k2 – коэффициент коррекции производной относительно проскальзывания.
Используя полученные данные в математической модели и программе расчета процесса торможения в циклическом режиме, нами получены следующие результаты (рисунок 2).
Сопоставление полученных теоретических значений параметров торможения с результатами экспериментальных данных показало их адекватность. Максимальное отклонение не превышает 13%.
Результаты теоретических и экспериментальных исследований показали, что рассматриваемые автопоезда удовлетворяют требованиям, предъявляемым к тормозным системам.
Определены условия буксования седельного автопоезда при различных уклонах дороги в зависимости от коэффициента сцепления шин с дорогой. «Укладывается» габаритная полоса движения подвижного состава.
«Вписываемость» седельного автопоезда на поворотах определено расчетно-графическим методом. Определен фактор маневренности для горных дорог с радиусом поворота R = 10 м.
Начертив схему определения габаритной полосы движения седельного автопоезда (рисунок 3) можно получить кривую (рисунок 4), которая и является характеристикой маневренности или «вписываемости» анализируемого седельного автопоезда. Эта кривая разделяет поле графика на две области: над кривой – область «вписываемости» автопоезда в прямоугольный проезд (например, для самых узких участков дороги перевала «Тоо-Ашуу», точка «А»), под кривой – область «невписываемости».
скорость |
время |
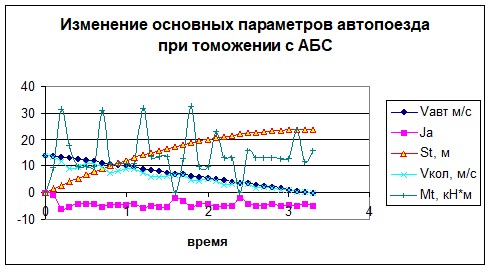
Рисунок 2 – Изменение основных параметров автопоезда при торможении с АБС
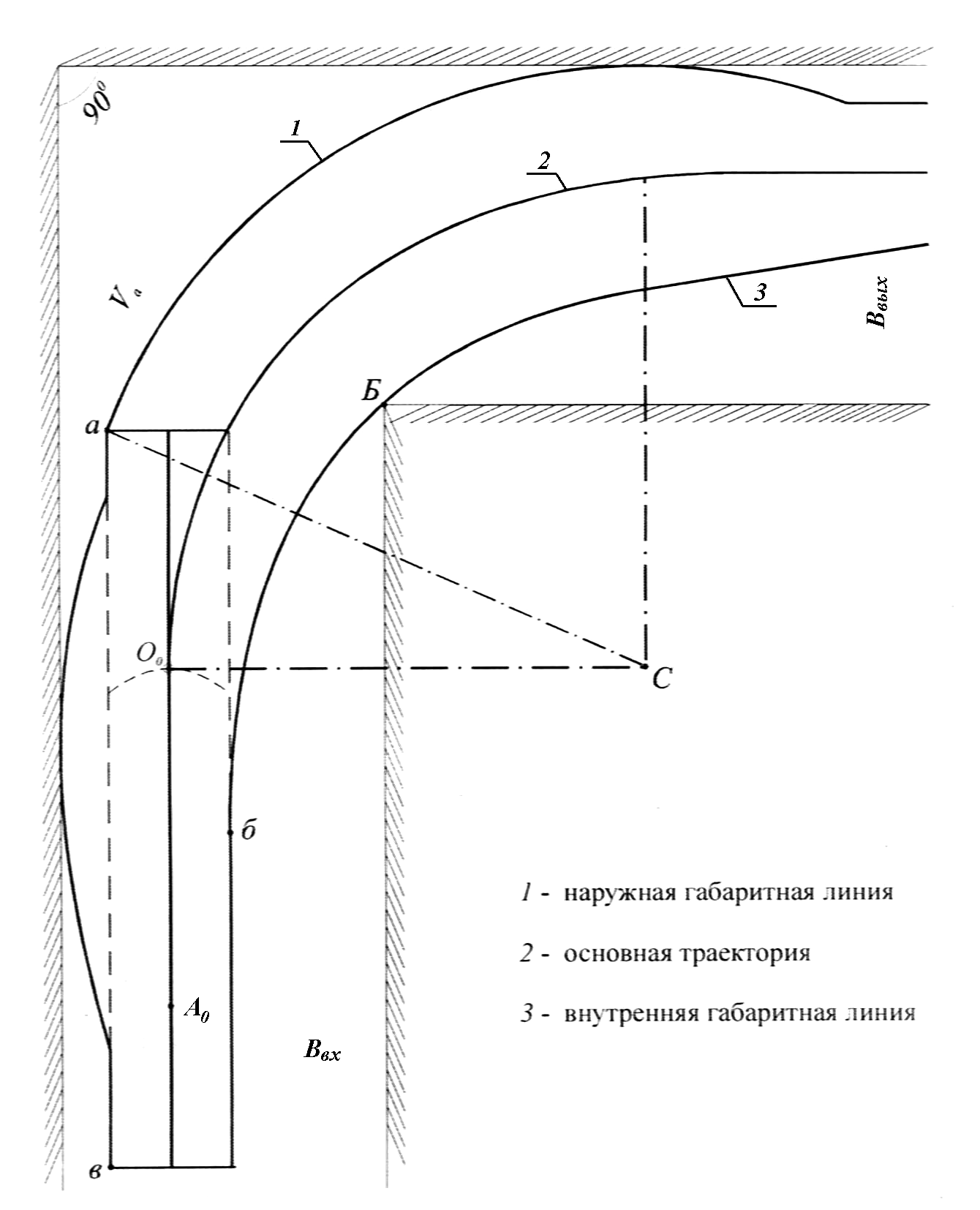
Рисунок 3 – Габаритная полоса движения седельного автопоезда
Фактор маневренности для седельного автопоезда с тягачом MANTGS
![]() (11)
(11)
где В0 – габаритная ширина автопоезда по наиболее широкому звену;
ВГ – ширина равноширокого прямоугольного проезда.
Таким образом, фактор маневренности для седельного автопоезда с тягачом MANTGSWW и полуприцепов – цистерн ФРЮЕХАУФ-TF34T13RBA составил 0,357.
Из полученных результатов расчётной характеристики маневренности седельного автопоездов в составе рассматриваемых тягачей и полуприцепа – цистерны ФРЮЕХАУФ-TF34T13RBA, следует, что автопоезд может двигаться по участкам с крутыми поворотами дороги перевала «Тоо-Ашуу».
Выводы: Полученные ррезультаты теоретических и экспериментальных исследований показали, что рассматриваемые автопоезда удовлетворяют требованиям, предъявляемым к тормозным системам. Из полученных результатов расчётной характеристики маневренности седельного автопоезда в составе рас-сматриваемых тягачей и полуприцепа – цистерны ФРЮЕХАУФ-TF34T13RBA, следует, что автопоезд может двигаться по участкам с крутыми поворотами дороги перевала «Тоо-Ашуу». Поэтому дальнейшие исследования с использованием этих параметров, безусловно, являются актуальными.

Рисунок 4 – Характеристика маневренности
СПИСОК ЛИТЕРАТУРЫ
1. Управляемость и устойчивость автомобиля. – М.: Машиностроение, 2001. – 324 с.
2. Дорожные условия и безопаность движения. – М.: Транспорт, 2003. – 271 с.
3. Исследования поперечной устойчивости автомобильных цистерн для перевозки жидких грузов: Автореф. дисс. … канд. техн. наук: 05.05.03 / . – Минск, 2008. – 20 с.
4. Безопасность движения автомобилей в условиях ограниченной видимости. – Москва: Транспорт, 2006. – 166с.
