


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
, преподаватель кафедры «Энергетика»
Лекции по дисциплине «Электропривод и автоматизация»
ЛЕКЦИЯ 6 – ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
6.1 Конструкция ДПТ
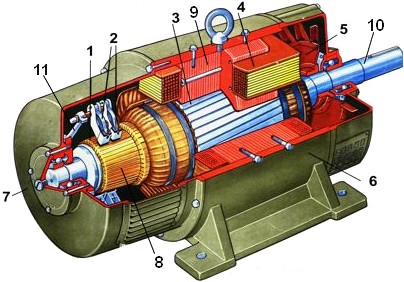
ДПТ состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов. Неподвижная часть (статор) состоит из станины 6 (корпуса) и главных полюсов (ГП) 9 с обмотками возбуждения 4 (ОВ), образующие индуктор - систему возбуждения машины. Сверху на станине есть кольца для переноса, снизу — лапы для крепления машины к фундаменту. Полюса равномерно распределены на внутренней поверхности статора - активной части. Так как через неё проходит постоянный магнитный поток, то вихревых токов в ней нет и она монолитная стальная. Сердечники ГП - шихтованные (из отдельных пластин, стянутых заклепками) из-за удобства изготовления. Для борьбы с реакцией якоря (размагничивающим действием его магнитного поля) ГП могут иметь компенсационную обмотку. Для безыскровой коммутации служат добавочные полюса 4, обмотки которых включаются последовательно в цепь ротора - якоря 3 с главной обмоткой ДПТ, по которой течет ее основной ток. Якорная обмотка располагается в пазах магнитопровода 3, а её выводы соединены с пластинами коллектора 8, которые (3 и 8) на общем валу 10. К внешней (активной) поверхности коллектора с помощью щеткодержателей 1 прижимаются токосъемные щетки 2 (из угля, графита и др.), составляющие группу из 1, 2 и более щеток смотря какой через контакт пропускается ток. Важны площадь контакта и сила нажатия щетки к коллектору. Чем они меньше, тем больше искрение под щетками, что ускоряет износ щеток и пластин коллектора. Продукты износа проводят ток и этим ухудшают изоляцию токопроводящих цепей. Щеткодержатели размещают на пальцах траверса 11, закреплённого внутри подшипникового щита 7. Для охлаждения машины на валу есть вентилятор 5.
Машины постоянного тока чаще используются как двигатели.
Преимущества: 1. Высокий пусковой момент; 2. Широкий диапазон и высокая точность регулирования скорости; 3. Легко реверсируются; 4. Экономичность.
Недостатки - связаны с наличием щеточно-коллекторного узла: 1. Повышенная стоимость; 2. Меньшая надежность работы; 3. Значительные размеры на единицу мощности.
6.2 Основные параметры ДПТ
• Iя – ток якоря; • Rя – сопротивление цепи якоря; • U – напряжение, приложенное к ней;
• Е – противо-ЭДС (электродвижущая сила) – направлена встречно U и препятствует Iя;
• Ф – магнитный поток, создаваемый ОВ; • n=60⋅щ/2р – скорость вращения якоря, об/мин:
• щ – угловая частота вращения якоря, рад/сек; • M – электромагнитный момент ЭД, Н∙м;
• Рмех = М · щ – механическая (полезная) мощность на валу, Вт,
• Рэл = U · Iя – электрическая (полная) мощность, ВА; • з = Рмех/ Рэл – КПД;
• л – перегрузочная способность: по току лI = Imax/Iном; по моменту лМ = Mmax/Mном
Противо-ЭДС машины - E = K · Ф · щ, где K = рN/ 2πа - конструктивный коэффициент;
р – число пар полюсов; N – число активных проводников; а – число пар параллельных ветвей обмотки якоря; Ток якоря - Iя = (U-E)/RЯ. Электромагнитный момент – M =K·Ф·IЯ.
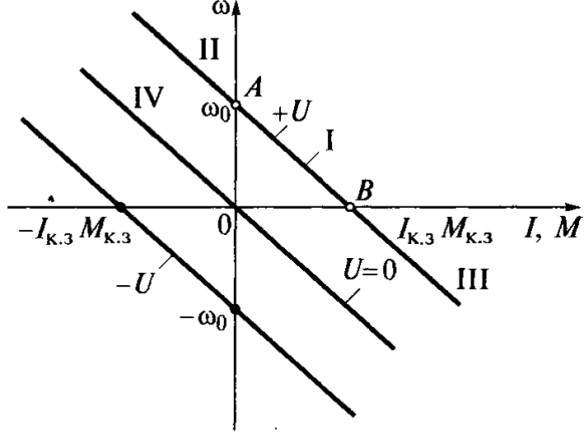
Уравнение ЭМХ: щ = U/(kФ) – IR/(kФ)
Уравнение МХ: щ = U/(kФ) – MR/(kФ)2.
На графике они совмещены, если kФ = const. Точка A – режим ХХ, точка B – режим КЗ.
Режим КЗ для ЭД - это не замыкание фаз между собой/на корпус, а неподвижное состояние якоря при поданном напряжении. Режим КЗ также называется пусковым режимом.
Уравнения ЭМХ и МХ можно записать: щ = щ0 – Дщ, где щ0=U/(k∙Ф) скорость идеального ХХ, а Дщ = IR/(kФ) – изменение скорости относительно щ0.
6.3 Энергетические режимы работы ДПТ
Электрическая машина (ЭМ) имеет свойство обратимости – работать как двигатель, так и генератор без изменения схемы включения. Работа ЭД в генераторном режиме важна для ЭП, так как при происходит торможение движения ЭП и ИО РМ.
Энергетический режим работы (РР) ЭМ зависит от направлений 2 вида переменных: электрических — Е и Iя, или механических — М и щ. При одинаковых направлениях М и щ и разных Е и Iя – это двигательный РР, а при противоположных М и щ и одинаковых Е и Iя — генераторный РР. Граничные между ними - режимы холостого хода и короткого замыкания.
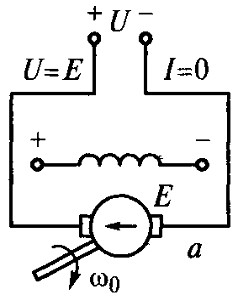
1. Режим холостого хода (ХХ) (рисунок а) - ЭД не получает энергии ни из электросети (кроме Э/Э на возбуждение), ни с вала. В нём: I=0, Е = U = kФщ0, M=0 и щ=щ0.
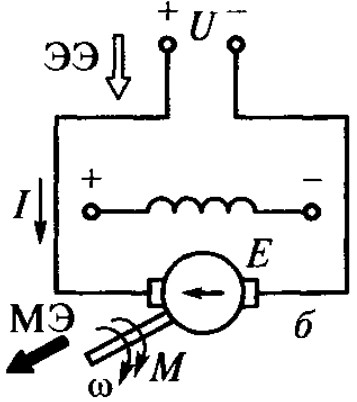
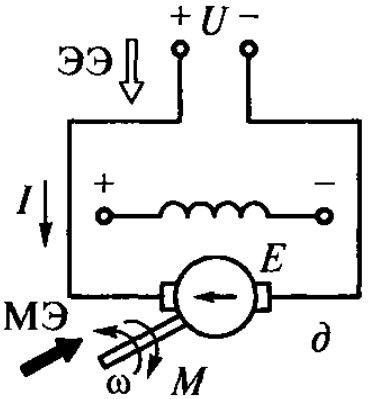
2. Режим двигателя (рисунок б) - участок I хар-ки. При нём: 0<щ<щ0 (I квадрант), где щ ↑↑ c М (сонаправлены), Е < U, I = (U-E)/R, I ↑↑ с U, а с E ↑↓. ЭЭ поступает из сети, а МЭ с вала двигателя передается ИО.
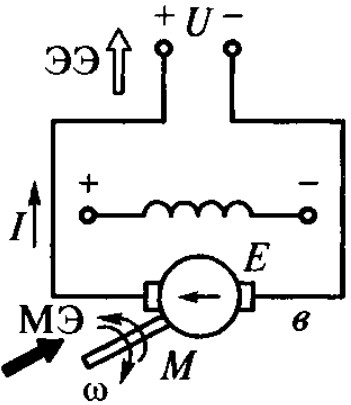
3. Режим генератора параллельно с сетью (рисунок в) - торможение с возвращением энергии в сеть - участок II хар-ки. В нём: щ>щ0, поэтому E>U, а I и M – отрицательные. ЭД получает МЭ от РМ и отдает ее в виде ЭЭ в сеть.
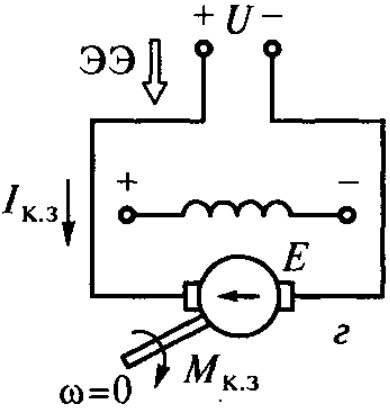
4. Режим короткого замыкания (рисунок г) - ЭЭ, поступая из сети, рассеивается в виде тепла в резисторах цепи якоря. В нём: щ = 0 и Е = 0, I = IКЗ = U/R. МЭ с вала двигателя не отдается, так как щ = 0.
5. Режим генератора последовательно с сетью (рисунок д) - торможение противовключением - при щ<0 - участок III. За счет изменения направления щ E меняет свою полярность, I↑↑ с U и E и определяется их суммой: I = (U+ E)/R. В итоге ЭЭ поступает из сети и вырабатывается самим ЭД за счет МЭ РМ и рассеивается в виде тепла в R цепи якоря.
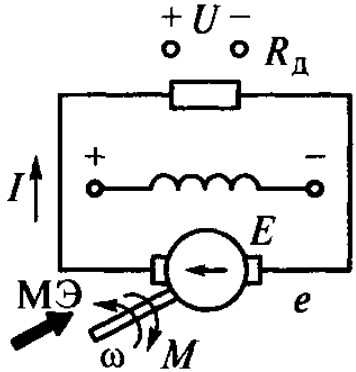
6. Режим автономного генератора - (рисунок е) - динамическое торможение. I ↑↑ с E, так как вызван ею. ЭЭ вырабатывается за счет поступающей с вала МЭ РМ и рассеивается в виде тепла в R якорной цепи.
6.3 Виды потерь в ЭП с ДПТ
Эффективность электромеханического преобразования энергии ЭД оценивается КПД (з): з = Pмех/(Pмех+ДP), где ДР — потери мощности в электродвигателе, которые делятся на электрические, магнитные и механические потери. 1. Электрические – потери в обмотках (якоря и возбуждения) или потери в меди – зависят от токов в них и от их активного сопротивления.
2. Магнитные – потери в магнитопроводе или потери в стали – обусловлены гистерезисом и вихревыми токами из-за перемагничивания сердечника. К ним относятся и добавочные потери, вызванные зубчатой конструкцией сердечников.
3. Механические – потери на трение - в подшипниках, щеток о коллектор или о контактные кольца. К ним относятся и вентиляционные потери от трения частей двигателя о воздух или охлаждающую жидкость.
Итак, ДР = C + V, где C – постоянные потери, V – переменные потери.
Постоянные потери не зависят от нагрузки ЭД – магнитные и механические, а также электрические в ОВ у синхронных двигателей и ДПТ НВ. Постоянные потери зависят от скорости двигателя, амплитуды и частоты питающего его U, но так как они изменяются мало, то их принимают неизменными.
Переменные потери зависят от нагрузки ЭД– она определяет токи, протекающие в обмотках – электрические потери.
ДР и потери энергии (ДA) в преобразователе - электрические и определяются по их КПД. Это потери в вентилях, трансформаторах, сглаживающих и уравнительных реакторах, фильтрах и т. д. Потери в полупроводниковых элементах преобразователей обычно относительно малы (несколько % от номинальной мощности).
ДР в механической передаче (МП) – механические - из-за трения в движущихся частях. Они оцениваются по КПД, что зависит от вида МП и нагрузки (передаваемого М).
ДР в элементах системы управления - обычно не превышают нескольких десятков Вт и учитываются при очень точных энергорасчётах.
Для расчётов ЭД нужно привести R обмоток ЭД к рабочей температуре, которая определяется классом изоляции, а также учесть потери в щеточно-коллекторном узле – RЩ = ∆Uщ/IЯ. НОМ, где ∆Uщ = 2 В - падение напряжения на контакте «щетка – коллектор».
Класс изоляции и раб. темпер. oC: А – 105; Е – 120; В – 130; F – 155; Н – 180; С > 180.
6.4 Способы возбуждения ДПТ
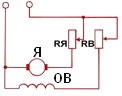
1. Независимое - ОВ независима от цепи якоря ЭД. Для генераторов ПТ - это единственный вариант схемного решения. В двигателях оно может выполнятся на постоянных магнитах. В них 2 канала управления – напряжением ротора и напряжением ОВ. ДПТ НВ - самые массовые по сравнению с другими типами возбуждения.
2. Параллельное - ОВ параллельна цепи якоря ЭД. По характеристикам близки к НВ.
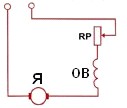
3. Последовательное – ОВ включается последовательно с обмоткой ротора. Из-за этого магнитный поток зависит от тока якоря (фактически – от нагрузки). Имеют нелинейные характеристики и на практике используются редко.
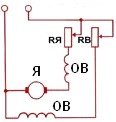
4. Смешанное – две ОВ – параллельная и последовательная.
