

1.4. Системы сотовой связи
1.4.1. Общие принципы построения систем сотовой связи.
Структура сотовой сети. Сотовые системы относятся к системам, реализующим двунаправленную связь между фиксированной частью системы, т. е. расположенной в соответствующем месте базовой станцией (БС) и подвижными станциями (ПС), которые перемещаются по территории, охватываемой сетью БС. Зона охвата системы сотовой связи разделена на подзоны, обслуживаемые БС, которые располагаются, как правило, в их центрах. Зону покрытия одной БС можно символически обозначить правильным шестиугольником (отсюда и название соты).
На рис.1.4.1 изображен пример деления зоны покрытия системы на соты. Площадь одной такой соты определяется как
![]() , (1.4.1)
, (1.4.1)
здесь Rсота – радиус окружности описанный вокруг шестиугольника (соты).
Очевидно, что, Rсота – это также и расстояние от центра шестиугольника до его вершины. Причина деления зоны обслуживания системы на соты – недостаточная емкость единственной БС, которая имела бы достаточную мощность и могла бы обеспечить радио покрытие всей территории в той же ограниченной полосе частот. Под емкостью здесь понимается максимальное количество подвижных станций, одновременно обслуживаемых системой.
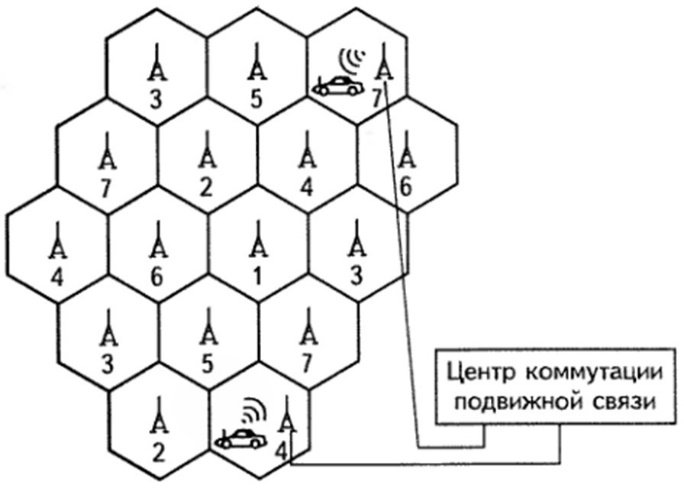
Рис.1.4.1. Деление сотовой сети на соты
Рассмотрим сотовую систему, в которой используется метод частотного уплотнения каналов. Пусть каждой ПС для передачи сигнала требуется полоса частот в Дf Гц, и пусть каждой сотовой системе выделен частотный диапазон шириной MДf Гц. Каждый диапазон шириной Дf Гц можно назвать каналом. Таким образом, система с одной базовой станцией, излучающая мощный сигнал и покрывающая всю территорию, предоставляет М каналов и может одновременно обслужить только М подвижных станций. С другой стороны, разделение зоны обслуживания на соты и их нумерация, как это показано на рис.1.4.1, позволит многократно использовать каналы, если эти M каналов соответствующим образом распределить по N различным типам сот. Такая группа сот, в которой используются все доступные каналы, исключая их повторное использование называется сотовым кластером или просто кластером (от англ. cluster – группа). В рассматриваемом случае N=7 (семи сотовый кластер). При этом количество одновременно обслуживаемых ПС существенно возрастает. Площадь одной соты намного меньше области охвата всей системы, поэтому мощность, генерируемая базовой станцией одной соты, намного меньше мощности базовой станции, которая покрывает всю зону обслуживания системы. Обратим внимание на то, что соты, изображенные на рис.1.4.1, пронумерованы таким образом, чтобы расстояние между сотами, обозначенными одним и тем же номером, было максимальным. Таким образом удается минимизировать взаимное влияние сигналов, передаваемых в одном частотном канале.
Явление помехового влияния сигналов сот, работающих с тем же каналом, что и данная, на сигнал этой соты называется внутриканальной помехой (или соканальной помехой). Это характерная особенность сотовых систем, которую необходимо учитывать при разработке.
Разделение зоны охвата системы на соты, выделение каждой соте подгруппы каналов и возможность изменения мощности базовой станции приводят к возможности реализации гибкой структуры системы. В центрах городов, с высокой концентрацией пользователей сотовых телефонов, соты обычно имеют меньший размер, а каналы используются большее количество раз, что позволяет обеспечить больший трафик на единицу обслуживаемой площади. В свою очередь, в сельской местности, где количество подвижных станций зависит, например, только от интенсивности движения по шоссе, соты имеют больший размер, в их распоряжении находятся меньшее количество каналов, а мощности базовых станций выше.
В свою очередь, разделение зоны охвата системы на наборы сот имеет следующие важные последствия: 1) существование внутриканальных помех; 2) необходимость обеспечения автоматической передачи соединения между подвижной станцией и текущей базовой к следующей БС, при пересечении ПС границы между соседними сотами.
Процедура эстафетной передачи соединения называется хэндовер-ом (от англ. handover – передача контроля). Подвижная станция переключается на новую БС, если уровень принимаемого от нее сигнала превышает уровень сигнала, получаемого от текущей базовой станции на установленную пороговую величину.
Важным последствием изменения местонахождения абонента в границах зоны обслуживания системы является необходимость обнаружения местоположения конкретной подвижной станции для установления соединения. Включенная и находящаяся в режиме ожидания ПС должна периодически обновлять информацию о своем местонахождении, чтобы обозначить присутствие в системе связи. Другой способ уточнения местоположения это когда целая группа БС запрашивает ответ данной ПС, зная, что та находится в зоне обслуживания одной из них.
Важнейшая проблема, которую приходится решать в сотовой радиосистеме, определение топографии размещения БС. Для того чтобы обеспечить удовлетворительное качество соединений по всей области покрытия системы, БС должны быть размешены соответствующим образом, и подгруппы каналов должны быть правильно распределены между ними. В рассмотренном нами примере (рис.1.4.1) считалось что, подвижные станции равномерно распределены во всей зоне охвата сотовой сети. На самом деле это крайне редкое явление. В реальных условиях имеет место неравномерного распределения ПС в сотовой системе. Кроме того потребности абонентов изменяются как во времени, так и в пространстве. Решением этой проблемы является увеличение емкости системы. Емкость сотовой сети обычно увеличивается следующими методами:
1. Разделение сот на секторы – обычно соту разделяют на секторы по 120 градусов. При этом применяются секторные антенны;
2. Дробление сот на соты меньшего размера – как правило выполняется путем создания сот меньшего размера в определенной части зоны покрытия соты. Радиусы меньших сот принимаются равными половине радиуса исходной соты, а их площади соответственно становятся меньше в четыре раза. Большие соты используются в районах с небольшим трафиком, а малые – в зонах с более интенсивным трафиком.
Элементы теории сотовых сетей. При разработке типовой сотовой сети принимается во внимание поведение абонентов. Всегда существует некоторая вероятность того, что пользователь не сможет установить соединение из-за временного недостатка свободных каналов. В этом случае единственный способ установить соединение – это повторить запрос. Система, которая работает по такому принципу, называется системой с потерями. С точки зрения пользователя, который не может установить соединение, система заблокирована. Вероятность этого события называется вероятностью блокировки. Более сложные телекоммуникационные системы, называемые системами с ожиданием, в случае отсутствия свободных каналов ставят запрос на установление соединения в очередь и постепенно устанавливают эти соединения по мере освобождения каналов. В любом случае запрос на установление связи является случайной величиной, изменяющейся в зависимости от времени суток. Поэтому было введено понятие часа наибольшей нагрузки (ЧНН) – часовой временной интервал, в котором наблюдается максимальная интенсивность запросов. Во многих странах ЧНН в сотовых системах приходятся в интервал с 16:00 до 18:00 по четвергам и пятницам.
Независимо от применяемой системы (система с потерями или система с ожиданием), при распределении радиоканалов необходимо учитывать ожидаемую интенсивность нагрузки. Интенсивность нагрузки – это мера использования канала; выражается в виде средней относительной занятости канала и измеряется в Эрлангах (Эрл). Например, средняя получасовая занятость канала в течение одного часа эквивалентна интенсивности нагрузки в 0,5 Эрл. В общем случае интенсивность нагрузки Аи для одного пользователя сотовой сети определяется как отношение длительности использования канала абонентом tи за некоторый промежуток времени Ти на этот промежуток времени:
![]() . (1.4.2)
. (1.4.2)
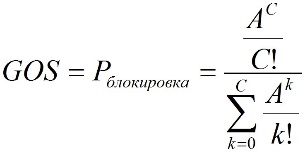
Одним из основных понятий в сфере сотовых технологий является уровень обслуживания (GOS – Grade of Service). Он представляет собой качественную меру, используемую для определения вероятности получения доступа к каналу при известном количестве каналов в сотовой системе. Уровень обслуживания обычно выражается в виде вероятности блокировки, т. е. вероятности того, что желающий установить соединение пользователь столкнется с отсутствием свободного канала, или что время ожидания свободного канала превысит установленный предел. В системах с потерями вероятность блокировки выражается первой формулой Эрланга:
 . (1.4.3)
. (1.4.3)
Здесь Рблокировка – вероятность блокировки, А – это суммарная интенсивность нагрузки одной соты, С – количество дуплексных каналов в этой соте.
Суммарную интенсивность нагрузки одной соты А можно определить, как:
![]() . (1.4.4)
. (1.4.4)
Здесь U – количество абонентов в одной соте, Au – интенсивность нагрузки для одного абонента определяемый из отношения (1.4.2). Первую формулу Эрланга можно представить в виде семейства графиков (рис.1.4.2), описывающих зависимость вероятности блокировки Рблокировка от суммарной интенсивности нагрузки одной соты A. Каждый график соответствует определенному количеству каналов C в соте.
Распределение каналов в сотах. Рассмотрим правила распределения каналов среди сот и секторов. Непосредственное влияние на выбор оказывают межканальные помехи (inter-channel interference), которые возникают между сигналами, излучаемыми в одной и той же соте (секторе) на разных несущих частотах. Необходимо минимизировать искажения. Этого можно достичь соответствующим подбором частот каналов в каждой соте. Межканальные помехи также тесно связаны с перемещением подвижных станций в границах одной соты и различными расстояниями от подвижных станций до общей базовой станции (эффект ближний-дальний, англ. near-far effect). Из-за не идеальности фильтров, выделяющих отдельные каналы, может возникнуть следующая ситуация: боковые лепестки спектра сигнала из канала, используемого подвижной станцией, расположенной вблизи базовой станции, попадают в полосу пропускания фильтра, выделяющего соседний канал с близкой несущей частотой, используемой удаленной подвижной станцией.
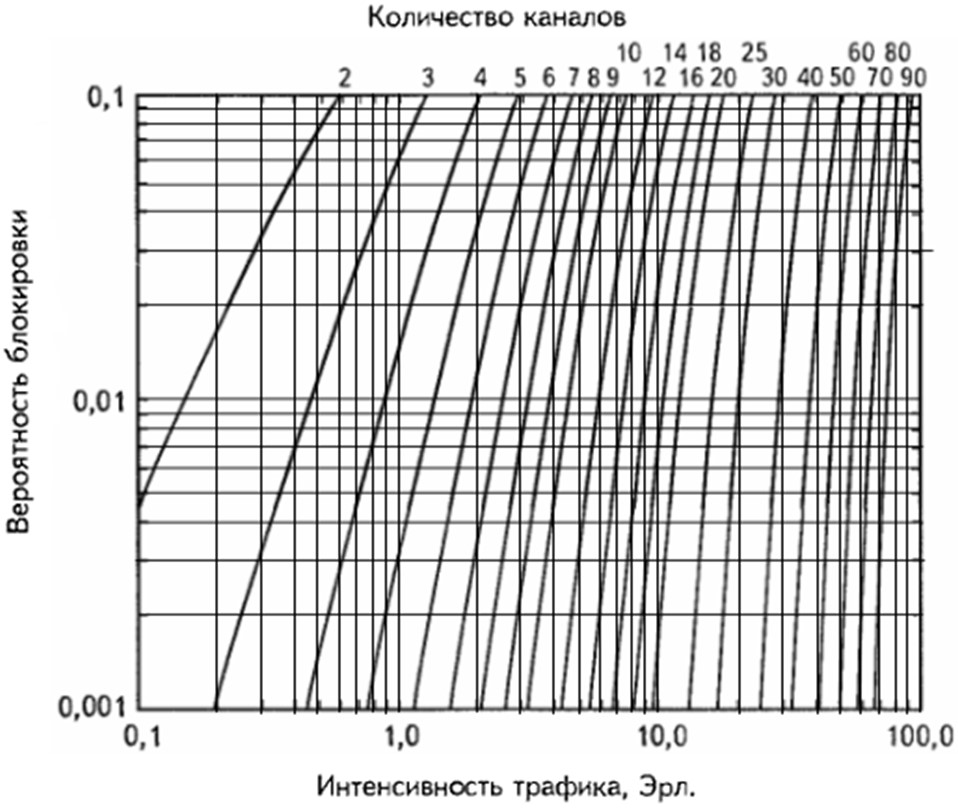
Рис.1.4.2. Семейство кривых Эрланга
Межканальные помехи существенно влияют на качество принимаемого полезного сигнала. Существуют несколько способов уменьшения влияния межканальных помех:
1. Распределение канальных частот с целью увеличения частотного разноса каналов в данной соте. На практике соседние каналы разделены полосой 4Дf, где Дf – полоса пропускания приемного фильтра;
2. Сложный синтез передающих и приемных фильтров, которые эффективно ослабляют боковые лепестки спектра передаваемых и принимаемых сигналов, что позволяет повысить избирательность приемника;
3. Прецизионное (точное) регулирование мощности сигналов, передаваемых базовыми и подвижными станциями по каждому каналу.
Третий способ имеет особое практическое значение. Необходимо обеспечить, чтобы поступающие на базовую станцию сигналы с различных подвижных станций одной соты имели примерно одинаковую допустимо низкую мощность, которая обеспечит требуемое отношение или вероятность появления ошибок. Все действующие сотовые системы применяют контроль мощности подвижных станций.
1.4.2. Технология и архитектура системы сотовой связи GSM.
В 80-х годах ХХ в. в Европе эксплуатировалось множество взаимно несовместимых аналоговых систем сотовой телефонии. Как следствие, пользователи были привязаны к своим операторам, а их мобильные телефоны не работали за пределами области охвата родной системы подвижной связи. Для совместного решения этой проблемы в рамках Европейского Союза была создана специальная рабочая группа по вопросам мобильной телефонии (Group Special Mobile – GSM), в задачи которой входила разработка стандартов всеобщей системы мобильной сотовой телефонии. В создании новой системы принимали участие промышленные, научные и проектно-конструкторские организации из 17 стран. В настоящее время аббревиатура GSM означает Global System for Mobile Communication (глобальная система подвижной связи), что отражает распространение стандарта GSM далеко за пределы Европейского континента.
В настоящее время известны такие спецификации как GSM 850, GSM 900, GSM 1800 и GSM 1900. GSM 850 и 1900 нашли применение в США, Канаде, отдельных странах Латинской Америки и Африки. GSM 900 и 1800 используется в Европе, Азии. Перечисленные спецификации отличаются в основном диапазоном рабочих частот и мощностью излучения базовых и подвижных станций.
Основы архитектуры GSM. Зона обслуживания системы GSM разделена на фрагменты (рис.1.4.3), каждый из которых обслуживает центр коммутации подвижной связи (Mobile Switching Center, MSC).
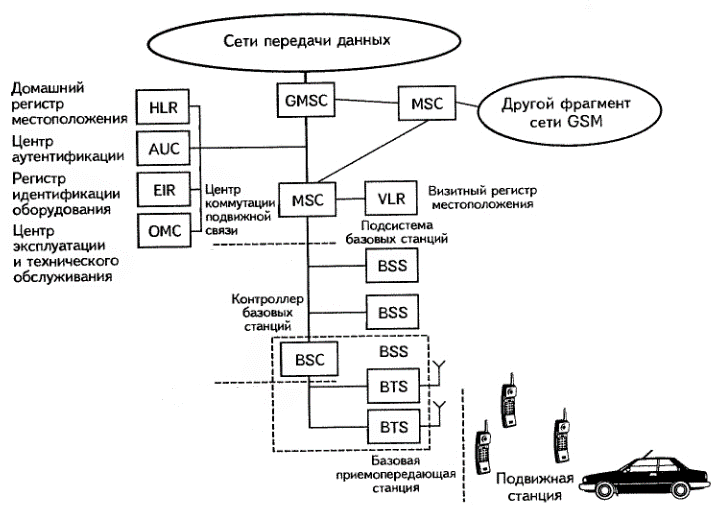
Рис.1.4.3. Структура сети GSM
MSC представляет собой специализированный центр электронной коммутации, к которому добавлены функциональные блоки, решающие задачи, характерные для системы сотовой подвижной связи. Каждый MSC соединен с соответствующим гостевым регистром местоположения или просто гостевым регистром (Visitor’s Location Register, VLR). Этот регистр содержит необходимую информацию о подвижных станциях, временно расположенных в области обслуживания данного оператора (роуминг). Помимо VLR система GSM каждого оператора оборудована тремя другими регистрами:
- HLR (Home Location Register) – домашний регистр или домашний регистр местоположения – база данных подвижных станций, постоянно зарегистрированных в системе конкретного оператора. Также содержит информацию о наборе услуг предоставляемых каждому абоненту. В HLR фиксируется местоположение абонента для организации его вызова, и регистрируются фактически оказанные услуги. В больших системах может быть больше одного HLR, однако информация о каждом абоненте хранится только в одном из них;
- AUC (Authentication Center) – центр аутентификации базы данных, позволяющая определить разрешен ли допуск абоненту к услугам системы, имеющему модуль подлинности – SIM-карту (Subscriber Identity Module);
- EIR (Equipment Identification Register) – регистр идентификации оборудования – база данных серийных номеров подвижных станций, используемых в системе. Номера украденных или потерянных телефонов помещаются в черный список, что позволяет предотвратить дальнейшее использование в системе этих телефонов.
Все MSC в сети соединены друг с другом. Один или более MSC организуют транзитные центры коммутации подвижной связи (Gateway Mobile Switching Center, GMSC), которые играют роль шлюзов во внешние сети, такие, как, телефонные сети общего назначения. Каждый MSC контролирует, по крайней мере, одну подсистему базовых станций (Base Station System, BSS) которая состоит из контроллера базовых станций (Base Station Controller, BSC) и некоторого количества базовых приемопередающих станций или просто базовых станций (Base Transceiver Station, BTS). Базовая станция состоит из подсистемы, выполняющей основные функции передачи и приема сигналов, а также блока, реализующего простые функции контроля и управления. В базовой станции выполняются также процедуры GSM-кодирования/декодирования речи и производится адаптация скорости передачи данных. Базовые станции обычно располагаются в центрах сот, покрывающих всю область обслуживания системы. В таких сотах функционирует определенное количество подвижных станций (Mobile Station, MS), которые имеют возможность динамически изменять свое местоположение. Они осуществляют информационный обмен с ближайшей (или с «сильнейшей») базовой станцией.
Основная задача MSC заключается в координации установления соединения между двумя мобильными абонентами системы GSM или между одним пользователем системы GSM и абонентом внешней сети.
Центр эксплуатации и технического обслуживания (Operating and Maintenance Center, OMC) обеспечивает работу отдельных элементов сети GSM. Он соединен со всеми элементами коммутационной сети и выполняет функции администрирования, такие, как тарификация и мониторинг трафика, а также принимает необходимые меры в случае отказа отдельных элементов сети. Одна из наиболее важных задач OMC это управление регистром HLR. В больших сетях имеется более одного OMC, и тогда всей сетью управляет центр управления сетью (Network Management Center, NMC). ОМС соединяется с другими компонентами сети специальной сетью управления, реализованной по выделенным телефонным линиям или с помощью других сетей фиксированной связи.
Основные параметры радиопередачи в системе GSM. Рассмотрим поставленный вопрос на примере стандарта GSM 900, т. к. именно он является базовой спецификацией GSM. Стандарт предусматривает работу передатчиков в двух диапазонах частот каждый шириной в 25 МГц:
1. Полоса частот (890-915) МГц – для передачи сообщений с подвижной станции на базовую станцию (uplink);
2. Полоса частот (935-960) МГц – для передачи сообщений с базовой станции на подвижную станцию (downlink).
Дуплексная передача данных осуществляется в режиме FDD (Frequency Division Duplex – дуплексная передача с частотным разделением). При переключении каналов во время сеанса связи разность между этими частотами (между частотами двух диапазонов, а не соседними частотами) постоянна и равна 45 МГц. Разнос частот между соседними каналами связи составляет 200 кГц. Таким образом, в отведенной для приема/передачи полосе частот, шириной 25 МГц, размещаются 124 канала связи. В стандарте GSM используется многостанционный доступ с частотно-временным разделением каналов, что позволяет на одной несущей частоте разместить 8 речевых каналов одновременно. Более наглядно сказанное представлено на рис.1.4.4.

Рис.1.4.4. Полоса частот стандарта GSM 900:
а) разнос между частотами в направлении ПС-БС и в направлении БС-ПС; б) число физических речевых радиоканалов в дуплексном радиоканале; в) число физических дуплексных речевых радиоканалов
Такую структуру распределения частот в системе GSM можно экстраполировать к любой из ранее перечисленных спецификаций. В табл. 1.4.1 показаны эти и другие основные технические характеристики стандартов GSM 900 и 1800.
Табл.1.4.1.
Стандарт | Диапазон частот (МГц) | Дуплексный разнос частот приема и передачи (МГц) | Эквивалентная полоса частот на один речевой канал (кГц) | Ширина полосы канала связи (кГц) | Количество каналов | |
ПС→БС | БС→ПС | |||||
GSM 900 | 890-915 | 935-960 | 45 | 25 | 200 | 124 |
GSM 1800 | 1710-1785 | 1805-1880 | 95 | 12,5 | 200 | 374 |
Стандарт | Количество речевых каналов на несущую | Максимальная мощность БС (Вт) | Максимальная мощность ПС (Вт) | Минимальная мощность ПС (Вт) | Метод доступа | Максимальная скорость транспортного средства (км/час) |
GSM 900 | 8 | 320 | 8 | 0,02 | FDMA/ TDMA | 250 |
GSM 1800 | 16 | 30 | 1 | 0,0025 | FDMA/ TDMA | 130 |
Временная структура системы GSM. Наименьший временной элемент системы GSM – одиночный двоичный импульс (бит), который длится 3,69 мкс. Скорость передачи данных в системе GSM составляет 270,833 кбит/с. В каждом временном слоте (всего 8) передается пакет из 148 битов. Длительность стандартного временного слота составляет 577 мкс. Разница между фактической длиной слота и эффективной длиной пакета данных называется защитным интервалом. Его существование обусловлено необходимостью резервирования времени для включения/выключения усилителя мощности передатчика в начале и в конце передачи каждого пакета данных. Кроме того, защитный интервал необходим для обеспечения точного размещения пакета данных внутри временного слота. Время распространения пакета пропорционально расстоянию между подвижной и базовой станциями и не является пренебрежимо малым по отношению к размерам соты.
Восемь слотов составляют кадр. Каждый слот соответствует своему каналу речи, т. е. в каждом кадре передается информация восьми речевых каналов. В каналах трафика и в ассоциированных с ними каналах управления 26 кадров образуют мультикадр. В свою очередь, 51 мультикадр составляет суперкадр длительностью 6,12 с. В случае каналов вещания и расположенных в тех же слотах каналов управления, мультикадр состоит из 51 последовательного кадра, а суперкадр состоит из 26 мультикадров. В обоих случаях 2048 суперкадров образуют высший уровень временной иерархии системы GSM – гиперкадр (рис.1.4.5). Он длится 3 ч 28 мин. 53 с и 760 мс. По истечении этого времени системные часы возвращаются к своему исходному состоянию. Длительность периода системных часов GSM обусловлена, в основном, применением алгоритма шифрования данных, использующего номер текущего кадра для генерирования ключа шифрования. Применение большого периода системных часов позволяет предотвратить несанкционированную расшифровку пользовательской информации и увеличивает уровень безопасности и конфиденциальности разговора.
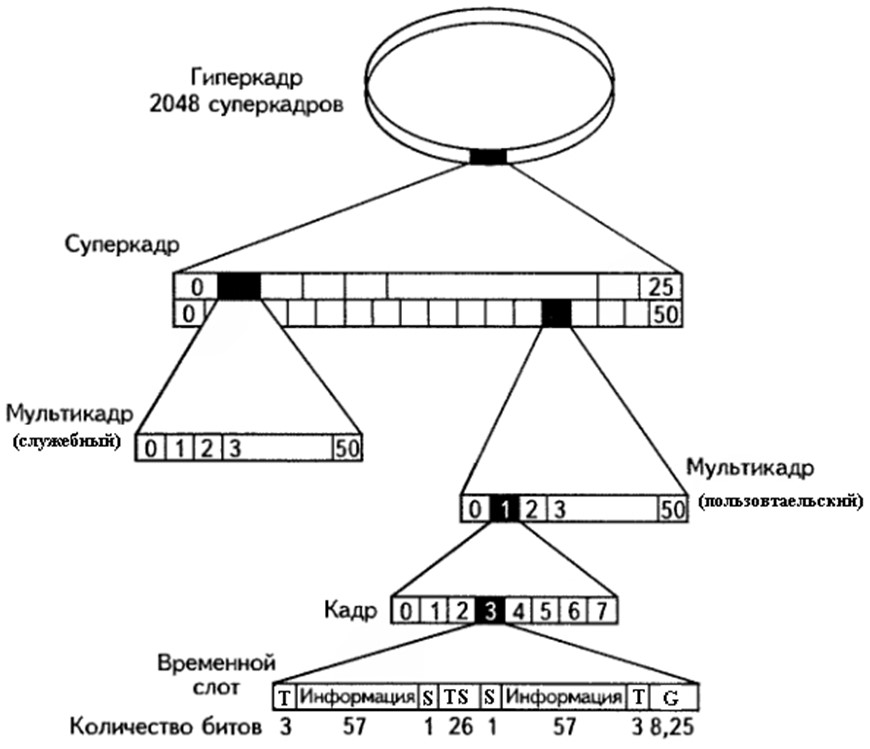
Рис.1.4.5. Временная структура системы GSM
Рассмотрим структуру временного слота.
1. Т – Tail bit (хвостовые биты). Повторяется два раза, необходимы как защитные бланки по краям пакета;
2. S – Stealing flag (скрытые флажки). Повторяется два раза, определяет тип передаваемой информации, т. к. она может быть, как пользовательской так и служебной;
3. TS – Training Sequence (обучающая последовательность) – для оценки качества связи, определения задержек информации между БС и ПС;
4. G – Guard period (защитный интервал).
Для передачи информации по каналам связи и управления, подстройки несущих частот, обеспечения временной синхронизации и доступа к каналу связи используется пять видов временных интервалов:
1. Нормальный временной интервал – для передачи пользовательской и служебной информации;
2. Временной интервал подстройки частоты – для синхронизации по частоте ПС. Повторяющиеся интервалы подстройки частоты образуют канал коррекции частоты;
3. Интервал временной синхронизации – для синхронизации по времени БС и ПС. Повторяющиеся интервалы временной синхронизации образуют канал синхронизации;
4. Установочный интервал – для установления и тестирования канала связи. Этот интервал не содержит в себе информации, т. к. в его задачи входит информирование о том, что передатчик функционирует;
5. Интервал доступа – для разрешения доступа ПС к новой БС.
Алгоритм функционирования систем сотовой мобильной связи. Алгоритмы функционирования систем сотовой мобильной связи различных стандартов в основном схожи и характеризуются нижеследующим.
1. Когда ПС находится в режиме ожидания, ее приемное устройство постоянно сканирует либо все каналы системы, либо только управляющие каналы.
2. Для вызова абонента всеми БС по каналам управления передаются сигналы вызова.
З. ПС вызываемого абонента при получении сигнала вызова отвечает по одному из свободных каналов управления.
4. БС, принявшие ответный сигнал, передают информацию о его параметрах в центр коммутации MSC, который переключает разговор на ту БС, где зафиксирован максимальный уровень сигнала ПС вызываемого объекта.
5. Во время набора номера ПС вызываемого абонента занимает один из свободных каналов БС, уровень сигнала которой в данный момент максимален.
6. По мере удаления вызываемого абонента от БС или в связи с ухудшением условий распространения радиоволн уровень сигнала уменьшается, что ведет к ухудшению качества связи.
7. Улучшение качества разговора достигается путем автоматического переключения вызываемого абонента на другой канал радиосвязи. Аналогичные действия предпринимаются при снижении качества связи из-за влияния помех или при возникновении неисправностей коммутационного оборудования. Для контроля таких ситуаций БС снабжены специальными устройствами, которые периодически измеряют уровни сигналов ПС, передающих речевые сигналы, и сравнивают эти уровни с допустимыми пределами.
