
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
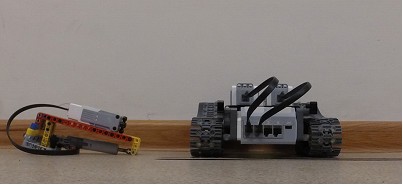
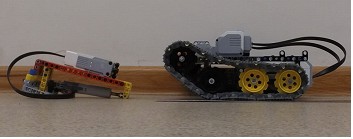
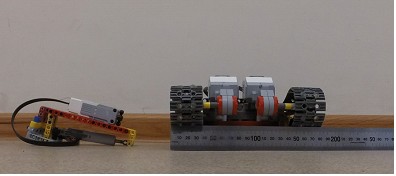
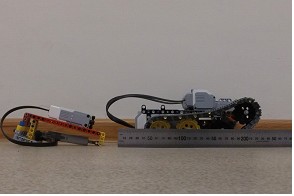
Данный робот предназначен для прохождения препятствий в соревновании «Кубок РТК». Основан на базе Lego Mindstorms EV3. Для передачи видео сигнала на монитор была использована обычная камера видеонаблюдения и радиопередатчик с приёмником. Чтобы пластмассовые гусеницы имели большее сцепление с поверхностью и не проскальзывали, на них нанесён строительный клей, обеспечивающий данные возможности не ухудшая поведение робота при передвижении (имеется в виду плохая маневренность и скорость). На роботе будет установлен манипулятор, часть которого лежит рядом с ходовой на фотографиях. Манипулятор позволит взять банку, поднять её и спокойно переместить туда, куда нужно. В движение данную конструкцию приводят 4 мотора EV3, два на ходовую часть (по одному сервомотору на каждую гусеницу) и два на манипулятор (один мотор отвечает за захват, другой за подъём/опускание стрелы). Я выбрал базу EV3, так как она позволяет использовать четыре мотора, а не три, как это сделано в NXT 2.0. Базу сложнее, чем EV3, я не стал, так как не разбираюсь в более сложных и продвинутых системах.
