
2.3 Реверсор
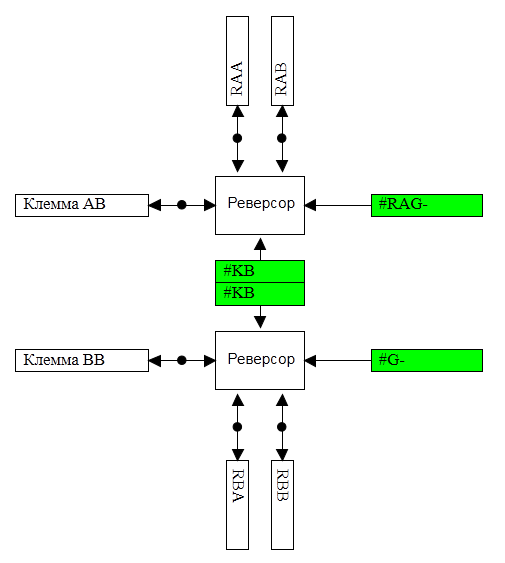
Основная назначение реверсора состоит в переключении полярности обмоток тяговых электродвигателей для изменения направления их вращения. Для составления соответствующей схемы используется субмодель электронного ключа, рассмотренная ранее. Реверсор имеет 4 электрических контакта, по два на обмотку возбуждения и на соединение с основной цепью. Дополнительный математический вход задает сигнал управления режимом работы реверсора, который через локальную переменную #R (блоки в память/из памяти) используется в схеме переключения полярности обмотки (Рисунок 6).
Рисунок 6 – Расчетная схема субмодели SimInTech блока «Реверсор» |
Внешние параметры схемы - сопротивление замыкания и размыкания, а также время переключения электрических ключей, передаются в субмодели ключа без изменений.
2.4 Электрическая передача постоянного тока
В рамках расчетной модели субмодель ЭППТ отвечает за переключение конфигурации тяговых электродвигателей (с последовательного на последовательно-параллельное), управление питанием, включение реверса, измерение величин токов в основной цепи и на каждой ветви при последовательно-параллельном соединении, обеспечение связи с субмоделью пульта.
В текущей версии модели не рассматривается подсистема ослабления магнитного поля обмотки возбуждении (параллельное включение резистора СШ1 на рисунке 2), её внедрение в модель производится аналогичным образом и не представляет трудностей.
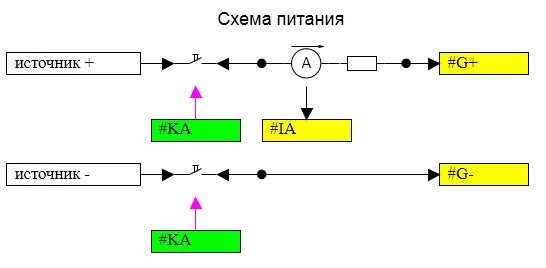
Рисунок 7 – Схемы SimInTech для подсистем управления питанием тяговых электродвигателей и подключения реверсора |
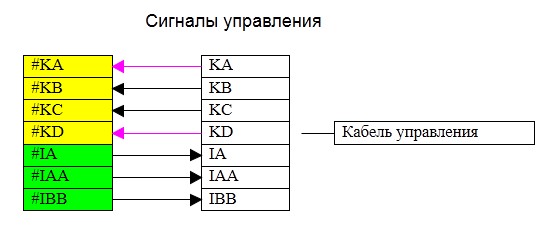
Рисунок 8 – Схемы SimInTech для переключения нагрузки генератора и обмена сигналами с подсистемой управления |



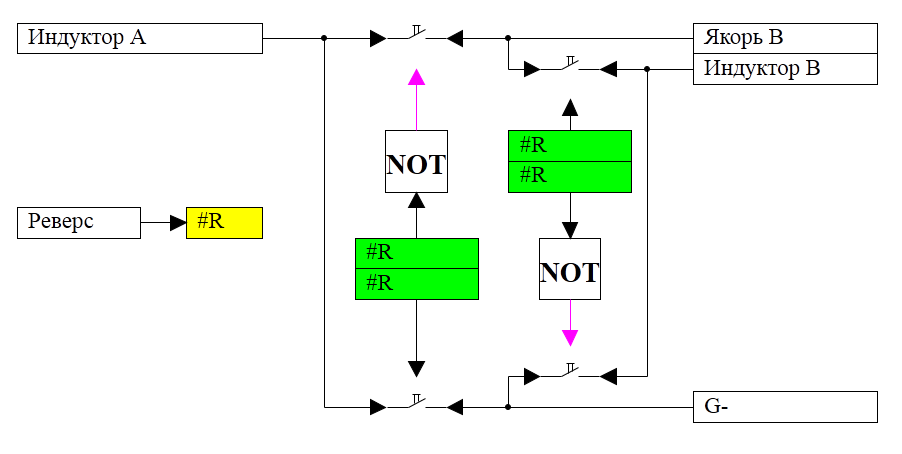
Расчетная схема ЭППТ в SimInTech основывается на блоках библиотеки электрики, а также на субмоделях реверсора, электрического ключа и идеального амперметра, рассмотренных ранее. В схеме имеется 10 электрических контактов, по четыре на каждую вагонетку (по два контакта на цепь возбуждения и цепь якорей электродвигателей) и два для подключения основного генератора. Кроме электрических портов, субмодель имеет информационный порт, представляющий из себя двунаправленную шину с набором математических сигналов управления режимами и выдачи значений токов в подсистему визуализации.
Электрическая передача разделена на четыре подсистемы, которые размещены на одной схеме: управление питанием, переключение скоростей, схема реверса, обмен сигналами с подсистемой управления. Для связи подсистем между собой используются блоки в память/из памяти.
2.5 Электрические машины
Мощность дизеля тепловоза преобразуется в механическое вращение колесных пар с помощью электрической передачи, включающей электрические машины постоянного тока двух видов: тягового генератора и шести двигателей с последовательным возбуждением. Любая электрическая машина обладает свойством обратимости, т. е. может работать в режиме генератора ли двигателя. Свойство обратимости будет использовано далее при моделировании - расчетные схемы электродвигателя и генератора будут использовать один и тот же блок «Электрическая машина».
Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части (индуктора) и вращающейся части (якоря с барабанной обмоткой). В модели электрической машины индуктор соответствует обмотке возбуждения, создающей магнитный поток. Вращение двигателя обеспечивается в результате взаимодействия магнитного потока обмотки возбуждения и тока, протекающего через якорь, закрепленный на валу. В случае генератора, якорь вращается под действием механического момента, развиваемого дизелем, что под действием тока в обмотке возбуждения приводит к образованию тока в обмотке якоря. Рассмотрим подробнее процессы взаимодействия обмоток электродвигателя.
Процесс протекания электрического тока через обмотки двигателя и генератора можно описать с использованием схемы замещения, представленной на рисунке 9. На нем источник ЭДС эквивалентен влиянию вращающегося магнитного поля на протекающий в обмотке ток, а индуктивность L и сопротивление R являются конструктивными характеристиками обмотки. В соответствии со схемой, уравнение напряжения для обмотки имеет вид:
![]()
где ![]() и
и ![]() – мгновенные значения напряжения и тока, а
– мгновенные значения напряжения и тока, а ![]() и
и ![]() – активное сопротивление и индуктивность обмотки.
– активное сопротивление и индуктивность обмотки.
Рисунок 9 – Схема замещения обмотки электрической машины |

Величина ЭДС якоря пропорциональна произведению частоты вращения машины и значению магнитного потока индуктора [3]:
![]() ,
,
где ![]() - константа,
- константа, ![]() - частота вращения якоря,
- частота вращения якоря, ![]() - магнитный поток индуктора.
- магнитный поток индуктора.
Противо-ЭДС, возникающая в обмотке возбуждения под действием изменяющегося в результате вращения магнитного поля, приводит к падению напряжения и пропорциональна производной величины магнитного потока. В схеме замещения противо-ЭДС также моделируется как источник с внешним входом, то есть схемы замещения обеих обмоток эквивалентны.
Механическое взаимодействие обмоток происходит под действием токов, протекающих через них, с образованием электромагнитного вращающего момента, создающего момент вращения в случае двигателя, либо момент торможения в случае генератора. Величина электромагнитного момента машины выражается следующим образом [3]:
![]() ,
,
где ![]() – величина момента,
– величина момента, ![]() – конструктивный коэффициент,
– конструктивный коэффициент, ![]() – ток обмотки,
– ток обмотки, ![]() – функция магнитного насыщения, которая при малых значениях силы тока имеет линейный характер, а по мере роста изгибается и становится нелинейной с ярковыраженной зоной насыщения. С целью повышения эффективности номинальный режим работы электрической машины находится, как правило, на перегибе кривой намагничивания.
– функция магнитного насыщения, которая при малых значениях силы тока имеет линейный характер, а по мере роста изгибается и становится нелинейной с ярковыраженной зоной насыщения. С целью повышения эффективности номинальный режим работы электрической машины находится, как правило, на перегибе кривой намагничивания.
Рассмотрим подробнее структуру схем моделирования отдельных элементов электрической машины в ПК SimInTech.
2.5.1 Схема обмотки
Обмотки электрических машин должны быть интегрированы в общую подсистему электрики тепловоза. Для этого расчетная схема должна быть создана на основе типовых элементов библиотеки электрики, либо поддерживать необходимый интерфейс сигналов, как это было сделано для субмодели идеального амперметра. Далее будем рассматривать первый подход как наиболее наглядный.
Для построения расчетной схемы обмотки используются следующие блоки библиотеки электрики: сопротивление, индуктивность, управляемый источник напряжения и узлы потенциалов (рисунок 10). Субмодель имеет два электрических контакта для подключения к внешней цепи, математический вход для передачи величины противо-ЭДС в цепь и математический выход для вывода в схему магнитного взаимодействия значений силы тока в обмотке. Внешними параметрами схемы являются: сопротивление обмотки и её индуктивность, они передаются в соответствующие блоки электрики без изменений.
Рисунок 10 – Схема SimInTech для моделирования обмотки электрической машины |

2.5.2 Схема расчета магнитного потока
Расчетная схема для вычисления магнитного потока якоря и индуктора, а также электромагнитного момента машины использует стандартные математические блоки. Субмодель имеет три математических входа для задания величин токов якоря, тока обмотки возбуждения и частоты вращения. Выходные порты также имеют математический тип данных и передают во внешнюю систему значения ЭДС для обеих обмоток и величину электромагнитного момента.
Рисунок 11 – Схема SimInTech для моделирования магнитного взаимодействия обмоток |
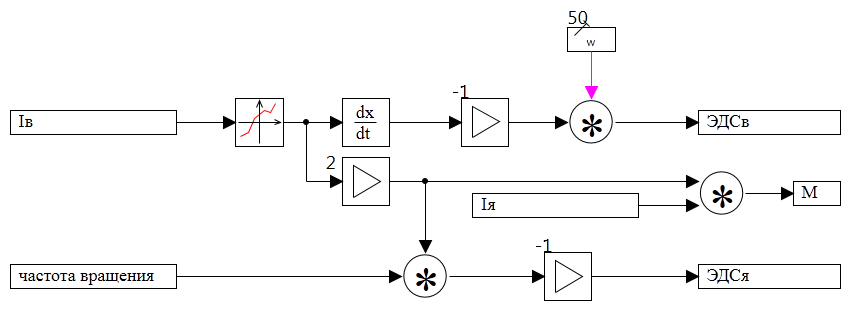
Для моделирования кривой намагничивания используется блок “Ломанная статическая характеристика”, для которой задаются масштабирующие коэффициенты по оси абсцисс (ток обмотки) и ординат (магнитный поток). Другие параметры, задаваемые из внешней системы касаются конструктивных характеристик обмотки и влият на величины возникающих в них ЭДС, а также на электромагнитный момент вращения (рисунок 11).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
