
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
По структуре первичной (исходной) информации о рельефе цифровые модели делятся на три основных типа [3]:
– модели с нерегулярным (хаотическим) расположением точек;
– модели с частично регулярным расположением точек;
– регулярные сеточные модели.
Нерегулярные модели содержат только исходные точки, выбранные, как правило, на характерных местах рельефа и являющиеся вершинами плоских треугольников, вдоль ребер которых можно выполнять линейную интерполяцию. Такая схема организации исходных данных позволяет учитывать структуру рельефа, но требует от оператора определенных навыков правильной оценки структуры рельефа. Цифровая модель рельефа на треугольниках произвольной формы (рисунок?), покрывающих всю область моделирования, представляет рельеф наиболее точно, поскольку обеспечивает плотное «прилегание» треугольников к моделируемой поверхности [1].

Рисунок? — Модель TIN
В силу этого такая модель применяется очень широко и известна как модель TIN (Triangulated Irregular Network), или модель на нерегулярной сетке [1].
Построение цифровой модели рельефа с использованием модели данных TIN сводится к созданию оптимальной сети треугольников, элементы которой «стремятся» быть как можно ближе к равносторонним. При этом любая точка двумерного пространства обладает только одной высотной координатой. Следовательно, в модели TIN не могут быть представлены отрицательные уклоны поверхности, такие, как нависающие утесы, гроты, полости и др.
Частично регулярные структуры содержат группы исходных точек, выбранных на структурных линиях, горизонталях и профилях. Сами группы могут быть нерегулярными и регулярными. Поиск точки частично регулярной структур осуществляется в два этапа: вначале определяется группа точек, затем каждая точка внутри группы [3].
В регулярных сеточных моделях исходные точки полностью упорядочены по плановым координатам, что существенно облегчает их поиск. Объем данных регулярных структур намного превышает объем нерегулярных и частично регулярных структур. Это объясняется тем, что для адекватного представления поверхности при регулярном расположении точек требуется большее число исходных точек, чем в случае расположения их на характерных участках рельефа. К регулярным структурам относятся сети высот (прямоугольные, квадратные и треугольные). Для практического использования модель на регулярной сетке более удобна (рисунок?) [1].
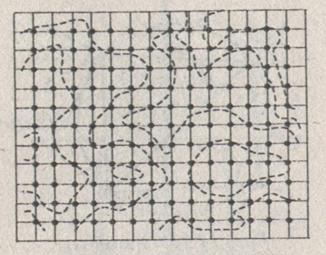
Рисунок? — Представление ЦМР с помощью регулярной сети высот
Такая модель называется регулярной и известна как матрица высот [1].
Эта модель не может быть построена непосредственно по точкам с известными отметками, и для этого используют либо полиномиальные методы, либо предварительно созданные на основе опорных точек другие модели — TIN, горизонтали и др. В первом случае отметки узлов регулярной сетки находят по известным параметрам полиномиальной функции, а во втором — линейной интерполяцией высот по ближайшим точкам сети треугольников или горизонталей [1].
В зависимости от содержания информации регулярные структуры данных для определения плановых координат точек можно разделить на равномерные и неравномерные. В равномерных достаточно хранить координаты начальной точки сети и шаг сети по каждой из координат, в неравномерных объем информации должен быть пропорционален числу узлов сети по каждой координате. Во-первых, это могут быть сетка квадратов, одинаковых прямоугольников, равнобедренных треугольников, и т. п., во-вторых — произвольные прямоугольные сети, параллельные профили с равным шагом и т. д. Точки выбираются с шагом Δх, Δу, при этом измеряются координаты Z точек [3].
Сеточная модель удобна тем, что сам процесс измерений может быть автоматизирован, а также уменьшается объем хранимой информации, так как в ПК вводятся только плановые координаты начальной точки, шаг сетки и высоты узловых точек. Шаг сетки выбирают с таким расчетом, чтобы можно было проводить линейное интерполирование и не были бы пропущены характерные особенности рельефа.
Недостатком этой модели является отсутствие возможности учитывать структуру рельефа.
Способы задания первичной информации о рельефе и методы математической обработки этой информации тесно взаимосвязаны и зависят друг от друга. При цифровом моделировании рельефа местности наиболее важным показателем качества является точность его представления. Она может быть получена с помощью математического анализа или экспериментально по набору контрольных точек. Преимущество математического подхода очевидно как с теоретической, так и с практической точки зрения. К настоящему времени предложено и используется множество различных способов математического построения ЦМР. Исходя из анализа этих способов можно разделить их на структурно-цифровые, структурно-аналитические (САМР) и функциональные (аналитические).
Информация о рельефе в структурно-цифровых моделях формируется в виде массивов точек по скелетным линиям рельефа, горизонталям и экстремальным точкам. Склоны между смежными горизонталями должны быть однородными и при линейной интерполяции высот ошибки не должны превышать допустимых нормативных требований. Топографическая поверхность в этом способе может быть представлена либо в виде многогранников, ребрами которых являются линии, соединяющие экстремальные точки на смежных горизонталях и структурных линиях рельефа, либо системой плоскостей, каждая из которых проходит через три точки местности, расположенные в характерных местах. При восстановлении цифровой модели рельефа в первом случае осуществляется поиск точек пересечения заданных линий профилирования с зафиксированными горизонталями, скелетными линиями, выделенными ребрами многогранников. Отметки точек находятся путем линейного интерполирования высот по отрезкам этих линий. Экспериментальные исследования показывают, что независимо от сложности рельефа определение высот точек обеспечивается с точностью, соответствующей принятым в топографии стандартам. Во втором случае высота произвольной точки находится интерполированием значений высот вершин треугольников из решения уравнения плоскости, проходящей через три точки. Основным достоинством структурно-цифровых моделей является их жесткая связь с характерными точками рельефа и адекватность моделей рельефу местности. Данные цифровые модели рельефа трудно приспособить для исследования динамики рельефа, т. к. возникают затруднения при их обновлении.
Задача построения сети неперекрывающихся треугольников является одной из базовых в вычислительной геометрии и широко используется в машинной графике и геоинформационных системах для моделирования поверхности и решения пространственных задач.
ЦМР можно получить как по карте, так и непосредственно по снимкам. При этом могут использоваться как новые материалы, так и полученные ранее, т. к. рельеф местности, как правило, редко претерпевает значительные изменения.
9 Стереопара снимков.
9.1 Основные определения
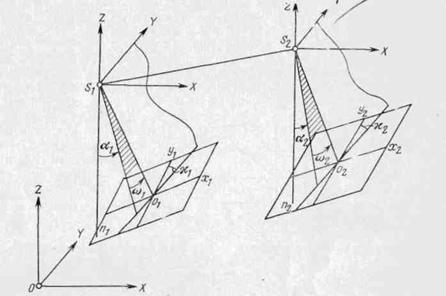
На рисунке изображена пара снимков Р1 и Р2 в положении, которое она занимала во время фотографирования. А — точка объекта, изобразившаяся на этих снимках.
S1 и S2 — точки фотографирования — точки пространства, в которых находились центры проекции во время фотографирования объекта;
В =S1S2 — базис фотографирования — расстояние между точками фотографирования;
S1о1a1 и S2о2a2— связки — совокупность проектирующих лучей, проходящих через центры проекции;
S1o1 и S2о2 — главные лучи — лучи связок, перпендикулярные к снимкам;
S1n1и S2n2— надирные лучи — отвесные лучи;
S1S2 и S2S1 — базисные лучи — лучи, совпадающие с базисом фотографирования;
f — фокусное расстояние — расстояние от центра проекции до снимка;
о1 и о2 — главные точки — точки пересечения главных лучей со снимками;
n1 и n2 — точки надира — следы отвесных лучей на снимках;
α01 и α02 — углы наклона снимков — углы между надирными и главными лучами;
S1a1 и S2a2 — соответственные (одноименные) лучи — лучи, проходящие через соответственные точки;
Wa — базисная плоскость — плоскость, проходящая через базис фотографирования;
S1S2o1 и • S1S2o2 — главные базисные плоскости — базисные плоскости, проходящие через главные лучи;
Каждая пара соответственных лучей, например S1a1 и S2a2, лежит в одной и той же базисной плоскости и пересекается.
Пусть одна связка, например правая, вместе со своим снимком движется по направлению к левой связке. При этом центр проекции не сходит с базиса и связка перемещается параллельно самой себе. В этом случае каждый проектирующий луч подвижной связки остается параллельным своему исходному положению и находится в одной и той же базисной плоскости. Таким образом, пересечение одноименных лучей нигде не будет нарушено. Например, луч S2A, скользя в плоскости S1S2A, пересекается с лучом S1A.
Пусть движение связки прекратилось и центр проекции S2 занял положение S'2. Так как пересечение соответственных лучей сохранилось, то каждой точке объекта соответствует новая точка. Так, точке А соответствует точка а. Очевидно, новых точек, образованных пересечениями соответственных лучей, появится столько, сколько точек изобразилось на стереопаре.
Поверхность, образованная совокупностью точек пересечения соответственных лучей, называется стереомоделью или моделью.
Так как в результате построения модели изложенным выше способом углы между базисными плоскостями получились такими же, какими они были при фотографировании, а треугольники, образованные базисом и каждой парой лучей, подобны соответствующим треугольникам, имевшим место при фотографировании, например треугольники S1S2A и S1S2а, то модель подобна объекту.
Расстояние между центрами проекции двух связок, по которым построена модель, называется базисом проектирования (В' = S1S'2).
Масштаб модели равен отношению базиса проектирования к базису фотографирования
1/t = B'/B. (14.1)
Итак, пара снимков позволяет восстановить связки, существовавшие во время фотографирования, и расположить их так, чтобы все соответственные лучи обеих связок попарно пересекались. В результате такой установки снимков и связок образуется модель объекта, изобразившегося на стереопаре.
Связки восстанавливают при помощи проектирующих камер, фокусное расстояние которых равно фокусному расстоянию снимков. Восстановление связок проектирующих лучей называется внутренним ориентированием снимков.
Проектирующие камеры с восстановленными связками перемещают относительно друг друга, устанавливая их так, чтобы соответственные лучи пересекались. Если это условие выполнено, то снимки занимают такое взаимное положение, какое было во время съемки. Установка снимков в положение, которое они занимали относительно друг друга во время фотографирования, называется взаимным ориентированием снимков. В результате взаимного ориентирования снимков получается модель объекта в произвольном масштабе, так как базис проектирования устанавливается обычно произвольно.
Чтобы использовать модель для создания плана или карты объекта, необходимо привести ее к заданному масштабу и ориентировать относительно геодезической системы координат Приведение модели к заданному масштабу и установка ее относительно геодезической системы координат называется внешним ориентированием модели.
Карту составляют путем проектирования контуров и горизонталей модели на основу.
Ортогональное проектирование элементов модели называется съемкой контуров и рельефа.
9. 2 Координаты и параллаксы точек стереопары
Положение соответственных точек на паре аэрофотоснимков определяют в прямоугольных плоских системах координат. Эти системы обозначают через о'1х1 у1 и о'2х2у2 (рис). Начала координат о'1 и о'2 находятся в пересечении прямых, соединяющих координатные метки 1, 2 и 3, 4. Ось х совмещают с прямой 1-2.
Обозначим координаты соответственных точек пары снимков, например точек а1 и а2, через х1, у1 и х2, у2.
Разность абсцисс соответственных точек стереопары называется продольным параллаксом,
р = х1 — х2, (14.2)
а разность ординат этих точек — поперечным параллаксом, ;.;
q = y1 — y
Пусть левый снимок стереопары наложен на правый так, что системы координат обоих снимков совпали. Тогда продольный параллакс представляет собой проекцию расстояния между соответственными точками ах и а2 на ось х, а поперечный — проекцию этого расстояния на ось у.
9. 3. Элементы ориентирования пары аэрофотоснимков
Элементы внутреннего ориентирования аэрофотоснимка — фокусное расстояние фотокамеры f и координаты главной точки х0 и у0. Они позволяют найти положение центра проекции относительно снимка и восстановить связку лучей, существовавшую в момент фотографирования объекта. В аэрофотосъемке левый и правый снимки стереопары получаются обычно одним фотоаппаратом. Поэтому можно считать, что элементы внутреннего ориентирования этих снимков одинаковы.
Элементы внешнего ориентирования пары аэрофотоснимка определяют положение левой и правой связок во время фотографирования.
К ним относятся:
Xs1 , Ys1 , Zs1 — координаты левой точки фотографирования S1,
Xs2 , Ys2 , Zs2 — координаты правой точки фотографирования S2;
α1 — продольный угол наклона левого снимка — заключен между осью Z и проекцией главного луча на плоскость XZ;
w1 — поперечный угол наклона левого снимка — составлен главным лучом с плоскостью XZ;
æ1 — угол поворота левого снимка — находится в плоскости левого снимка и заключен между осью у и следом плоскости, проходящей через главный луч и ось Y;
α2, w2, æ2 — продольный и поперечный углы наклона и угол поворота правого снимка.
Таким образом, пара аэрофотоснимков имеет три элемента внутреннего ориентирования и 12 элементов внешнего ориентирования.
9. 4. Зависимость между координатами точки объекта и координатами ее изображений на аэрофотоснимках
Получим формулы связи между координатами точки объекта и координатами ее изображений на стереопаре.
Пусть с концов базиса S1S 2 получена пара снимков Р1 и Р2 Изображения точки А объекта на снимках обозначим через аг и а2. Найдем координаты точки А, полагая, что элементы ориентирования снимков известны.

Величина и направление базиса фотографирования определяются вектором R0 с началом в точке S1, положение точки А—вектором R, а положения точек а1 и а2— векторами R’1 и R’2.
Векторы R и R’1 коллинеарны:
R = NR'1 . (9.1)
где N — скаляр.
Векторы S2A = R—R0 и R'2 также коллинеарны,
С другой стороны, данные вектора лежат в одной плоскости – следовательно – компланарны, т. е. .
(R - R0) * R'2 = 0 или R* R'2=R0* R'2
Подставив в это выражение величину R (4.11), получим
N (R'1* R'2) = R0 * R'2. (9.2)
Формулы (9.1) и (9.2) выражают математическую зависимость для пары снимков в векторной форме. Чтобы представить эту зависимость в координатной форме, спроектируем векторы на координатные оси X, Y, Z. Тогда получим
X=NX'1, Y = NY’1, Z = NZ’1
![]() , (9.3)
, (9.3)
В этих формулах: X, Y, Z — координаты точки А объекта (местности) в системе S1XYZ (см. рис. 178); Х’1, Y’1, Z’1 — координаты точки al, изображения точки А на левом снимке в системе S1XYZ; X'2, Y'2, Z'2 — координаты точки а2, изображения точки А на правом снимке в системе S2XYZ, параллельной S1XYZ; X0, Y0,,Z0 — координаты точки S2 в системе S1XYZ.
Пространственные координаты X', У’ и Z' точек а1 и а2 стереопары находятся по плоским координатам х и у. Для этого используются формулы (4.?).
 (4.?).
(4.?).
Направляющие косинусы, входящие в эти формулы, вычисляют по формулам (4.??).
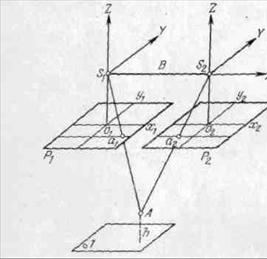 |
Формулы (9.3) получены для общего случая, когда элементы внешнего ориентирования снимков могут иметь любые значения. Перейдем к частному случаю съемки, в котором снимки горизонтальные и получены с одной и той же высоты (рис. 179). При этом оси координат x1 и х2 параллельны базису В.
Принимая левый конец базиса за начало фотограмметрической системы координат, совместим ось X с базисом, а ось Z — с главным лучом левой связки. В этом случае угловые элементы внешнего ориентирования снимков
α = w = æ = 0,
a координаты точки S2 :
Х0 = В, У0 = Z0 = 0.
Полагая, что координаты главной точки снимка х0 = y0 = 0. по формулам (4.?) и (4.??) получим
a1 = b2 = с3 = 1;
a2 = a3 = b1 = b3 = c1 = c2 = 0.
Х’1 = х1; Y’1=y1; Z’1= - f;
Х’2 = х2; Y’2=y2; Z’2= - f;
Согласно формулам (9.3)
![]() .
.
Следовательно,
![]() ,
, ![]()
![]() . (9.4)
. (9.4)
Основные формулы для горизонтальных снимков очень простые. Поэтому решение фотограмметрических задач по горизонтальным снимкам значительно облегчается по сравнению с обработкой наклонных снимков. На практике часто результаты измерений наклонных снимков приводят к горизонтальным снимкам, а затем используют формулы (9.4).
Итак, по паре горизонтальных снимков можно составить план местности, если известны геодезическая высота хотя бы одной точки сфотографированного на стереопаре участка и высота фотографирования. Для решения этой задачи достаточно внести поправки за рельеф в положения точек на левом или правом снимке. Чтобы ориентировать полученный таким образом план относительно геодезической системы координат, необходимо знать геодезические координаты X и Y двух точек местности или точек фотографирования.
Отметим еще одну существенную особенность пары горизонтальных снимков, полученных с одной высоты: на ней нет поперечных параллаксов и согласно формуле (14.3)
q = y1—y2 =
10 Модель местности, построенная по стереопаре снимков
10.1 Взаимное ориентирование снимков.
Рассмотрим основные процессы фотограмметрической обработки снимков, которые необходимо выполнить для построения фотограмметрической модели.
Одним из важных свойств стереопары снимков является возможность построения свободной модели местности путем взаимного ориентирования снимков. Модель строится в произвольно выбранной системе координат и в произвольном масштабе. Для построения модели не требуются опорные точки, а необходимо лишь выполнить измерения координат соответствующих точек стереопары. Построенную модель можно наблюдать и измерять, но координаты точек модели будут получены в произвольной системе координат и произвольном масштабе.
Введем фотограмметрическую систему координат, связанную только с парой снимков ![]() . Начало системы координат поместим в точку
. Начало системы координат поместим в точку ![]() - центр съемки первого снимка, ось
- центр съемки первого снимка, ось ![]() направлена вдоль линии базиса
направлена вдоль линии базиса ![]() . Для однозначного определения положения системы координат относительно снимков введем условие: плоскость
. Для однозначного определения положения системы координат относительно снимков введем условие: плоскость ![]() проходит через главный луч левого снимка
проходит через главный луч левого снимка ![]() . Такая система координат называется базисной системой.
. Такая система координат называется базисной системой.
|
Рисунок II.3.1
Как видно из рисунка II.3.1, элементы внешнего ориентирования левого и правого снимков имеют следующие значения:




Ненулевые угловые элементы  называются элементами взаимного ориентирования пары снимков.
называются элементами взаимного ориентирования пары снимков.
Базис b выбирается произвольно и определяет масштаб модели.
![]() ,
,
где ![]() - реальный базис в момент съемки.
- реальный базис в момент съемки.
Главное фотограмметрическое свойство снимков – это то, что для выполнения взаимного ориентирования снимков (определения элементов взаимного ориентирования ![]() ) достаточно идентифицировать в зоне перекрытия снимков 5 точек и измерить их координаты на левом и правом снимках
) достаточно идентифицировать в зоне перекрытия снимков 5 точек и измерить их координаты на левом и правом снимках  и знать элементы внутреннего ориентирования снимков
и знать элементы внутреннего ориентирования снимков  . Другая информация не требуется.
. Другая информация не требуется.
Действительно, если снимки расположены друг относительно друга как во время съемки, те есть выполнено взаимное ориентирование, то соответствующие лучи для любых соответствующих точек на снимках ![]() и
и ![]() пересекаются, образуя точку модели
пересекаются, образуя точку модели ![]() .
.
Соответственно для каждой пары соответствующих точек можно записать условие компланарности трех векторов  :
:
 , (__)
, (__)
которое определяет принадлежность векторов ![]() и
и ![]() одной базисной плоскости.
одной базисной плоскости.
Здесь ![]() и
и ![]() - векторы, определяющие положение точки
- векторы, определяющие положение точки ![]() в системах координат
в системах координат ![]() и
и  соответственно.
соответственно.
Учитывая (__), имеем:
 (__)
(__)
 (__)
(__)
Условие (__) записано в координатной форме в системе координат ![]() принимает вид:
принимает вид:
 (__)
(__)
или
 (__)
(__)
 (__)
(__)
 (__)
(__)
где ![]() - направляющие косинусы, вычисленные по угловым элементам
- направляющие косинусы, вычисленные по угловым элементам ![]() ;
;
![]() - направляющие косинусы, вычисленные по угловым элементам
- направляющие косинусы, вычисленные по угловым элементам  .
.
Таким образом, условие (__) связывает измеренные на снимках координаты точек ![]() и элементы взаимного ориентирования .
и элементы взаимного ориентирования .
Измерив координаты пяти точек в зоне перекрытия снимков, можно записать условие (__) для каждой точки и соответственно получить систему пяти уравнений, в которых пять неизвестных параметров .
Направляющие косинусы – тригонометрические функции углов ![]() , соответственно, уравнения (__) нелинейные. Для их решения используются специальные методы. В фотограмметрии для решения систем уравнения используется итерационный метод Ньютона (см. раздел __).
, соответственно, уравнения (__) нелинейные. Для их решения используются специальные методы. В фотограмметрии для решения систем уравнения используется итерационный метод Ньютона (см. раздел __).
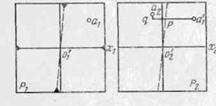
Для того, чтобы уравнения (__) имели «хорошие» решения, то есть система уравнении были устойчива, необходимо, чтобы точки располагались в зоне перекрытия в соответствии со схемой, показанной на рисунке ___.
Рисунок II.3.2
![]()
![]() – стандартные зоны, в которых необходимо выбирать точки, используемые для взаимного ориентирования.
– стандартные зоны, в которых необходимо выбирать точки, используемые для взаимного ориентирования.
Выполнив взаимное ориентирование снимков, то есть определив ![]() , можно вычислить координаты любой точки модели, если измерять координаты этой точки на левом и правом снимках:
, можно вычислить координаты любой точки модели, если измерять координаты этой точки на левом и правом снимках:
 ,
,
 ,
,
 ,
,
где ![]()

Координаты ![]() точек модели определены в фотограмметрической системе координат, которая имеет произвольно заданный масштаб и произвольно ориентирована относительно внешней системы координат.
точек модели определены в фотограмметрической системе координат, которая имеет произвольно заданный масштаб и произвольно ориентирована относительно внешней системы координат.
10.2 Внешнее ориентирование модели
Определив ЭВзО пары снимков (построив модель), можно получить пространственные прямоугольные координаты ее точек в условной фотограмметрической системе, причем в произвольном масштабе, так как расстояние между центрами проекций принимается произвольно, На производстве планы составляют в прямоугольной геодезической системе координат. Для перехода от условной пространственной системы координат к геодезической необходимо выполнить внешнее ориентирование модели.
На рис. показаны геодезическая ![]() и фотограмметрическая SXYZ системы координат. Начало второй из них совмещено с точкой S модели.
и фотограмметрическая SXYZ системы координат. Начало второй из них совмещено с точкой S модели.
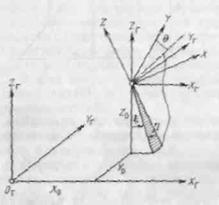
Введем вспомогательную систему координат с началом в точке S. Ее оси направим параллельно осям системы координат ![]() .
.
Элементами внешнего ориентирования модели называются величины, определяющие масштаб модели и положение ее относительно геодезической системы координат. К ним относятся:
t — знаменатель масштаба модели;
Х0, Y0, Z0 — геодезические координаты начала фотограмметрической системы координат;
![]() - продольный угол наклона модели, составленный осью
- продольный угол наклона модели, составленный осью ![]() с проекцией оси Z на плоскость
с проекцией оси Z на плоскость ![]() .
.
![]() - поперечный угол наклона модели, заключённый между осью SZ и её проекцией на плоскость
- поперечный угол наклона модели, заключённый между осью SZ и её проекцией на плоскость![]() .
.
![]() - угол поворота модели вокруг оси SZ, находится в плоскости XSY между осью Y и следом плоскости YгZ.
- угол поворота модели вокруг оси SZ, находится в плоскости XSY между осью Y и следом плоскости YгZ.
Таким образом, для внешнего ориентирования модели необходимо знать: t - знаменатель масштаба модели; геодезические координаты ![]() точки S модели и три угла
точки S модели и три угла ![]() ,
, ![]() ,
, ![]() её поворота. Эти семь величин называются элементами внешнего ориентирования модели.
её поворота. Эти семь величин называются элементами внешнего ориентирования модели.
Если они известны, координаты точки местности в геодезической системе координат определяются по формулам:
| (108) |
где, Axhq - матрица поворота, которая зависит от угловых элементов внешнего ориентирования модели. Ее направляющие косинусы a, b, c вычисляются по формулам, похожим на уравнения (18) при подстановке вместо углов ![]() ,
, ![]() и
и ![]() углов
углов ![]() ,
, ![]() и
и ![]() (с учетом изменения правой системы координат на левую).
(с учетом изменения правой системы координат на левую).
Элементы внешнего ориентирования, необходимые для преобразования фотограмметрических координат точек модели, определяются, как правило, по опорным точкам. Система уравнений (108), записанная для этих точек, содержит семь неизвестных величин. Для их определения необходимо иметь не менее трёх опорных точек, причём одна из них может быть высотной.
Задача решают графическим, графо-аналитическим или аналитическим способами.
Стереонаблюдение модели.
Для рассматривания стереоскопической модели местности используются различные методы. Для получения устойчивого стереоэффекта при наблюдении снимков необходимо выполнять следующие условия []:
- снимки должны быть получены с двух различных точек пространства;
- разность масштабов снимков не должна превышать 16%;
- каждым глазом должен наблюдаться один снимок стереопары (левым глазом – левый снимок, правым – правый; если снимки поменять местами, то получится эффект называемый «обратным стереоэффектом»);
- угол под которым пересекаются соответствующие лучи не должен превышать 160 (этим накладываются ограничения на превышения соседних точек местности, лежащих в поле зрения наблюдателя стереоэффекта).
В настоящее время для получения стереоизображения используется три метода:
- метод стереоскопа;
- метод анаглифов;
- метод миганий.
Способ анаглифов. На экран дисплея выводятся левое и правое изображения соответствующих участков стереопары, окрашенные в синий красный цвета. Изображения рассматриваются с помощью специальных очков, имеющих синий и красный светофильтры соответственно.
Возможно два варианта вывода изображения на экран дисплея:
- экран делится на две части по вертикали и на каждую половину выводятся соответственно окрашенное левое и правое изображения;
- окрашенные изображения выводятся на весь экран одновременно и с определенным смещением.
Способ “стереоскопа”. Экран делится на две части и на каждую половину выводятся изображения соответствующих участков стереопары. Изображения рассматривают с помощью оптико-механического устройства - стереоскопической насадки, типа стереоскопа. Насадка располагается перед экраном дисплея и обеспечивает возможность раздельного наблюдения изображения левого и правого снимков стереопары. То есть левый глаз видит только левый снимок, правый глаз - правый снимок стереопары.
Способ “миганий”. Существует несколько вариантов реализации этого способа. Наиболее распространенные:
- “активные” очки;
- “активный” экран;
Сущность метода “активные” очки заключается в следующем. На экран последовательно выводятся изображения соответствующих участков левого и правого снимков стереопары с частотой 120 Гц. Наблюдения выполняются с помощью очков, имеющих жидкокристаллические светофильтры, которые синхронно с экраном последовательно “закрывают” и “открывают” левый и правый глаз наблюдателя. Синхронизация “миганий” очков и экрана осуществляется путем непосредственного соединения очков и компьютера, либо посредством ИК-устройства, последовательно включающего и выключающего “затвор” очков.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
