

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Курс лекций по дисциплинам
«Физические основы микросисемной техники»
и «Специальные вопросы микросистемной техники»
1. Первичные преобразователи (датчики)
Одна из обширных областей, куда МСТ вторглась в первую очередь и где она завоёвывает позиции очень быстро - это датчики. В очень большом числе случаев система (и не только техническая) включает следующие главные устройства: получение нужной информации, её передача, переработка, принятие решения и, наконец, исполнительное устройство (рис.1). В последние годы в вопросах передачи и переработки информации микроэлектроника позволила получить впечатляющие результаты. Главным объектом внимания МСТ стали датчики и исполнительные механизмы.
Рис.1. Типичная схема технической системы
Задачи те же: интеграция конструкций и технологий с целью снижения весов, размеров, уменьшение доли ручного труда и, как следствие, снижение стоимости и возможности более массового применения микросистемных методов.
В датчиках, как правило, осуществляется преобразование различных форм энергии в электрический сигнал.
В таблице 1 приведены некоторые примеры преобразования различных видов энергии в электрический сигнал с помощью микроэлектронных преобразователей.
Таблица 1
Энергия | Микроэлектронные преобразователи |
Механическая | Тензорезисторы, тензодиоды, транзисторы, емкостные преобразователи, диод Ганна, микроэлектроды (туннельный эффект). |
Акустическая | Пьезопреобразователи, тензопреобразователи. |
Электрическая | Микроэлектроды, ионочуствительные приборы. |
Магнитная | Датчики Холла, магниторезисторы, магнитодиоды, магнитотранзисторы. |
Тепловая | Терморезисторы, диоды, транзисторы, пироэлектроны. |
Световая | Фоторезисторы, фотодиоды, фототранзисторы, ПЗС. |
Химическая | Микроэлектроды, хемотронные приборы, ионочуствительные приборы. |
Ядерная | Полупроводниковые детекторы излучения. |
Если проанализировать потребность в датчиках для измерения различных параметров, то в некоторой степени об этом можно судить по доле выпускаемых преобразователей различного типа (по американским данным).
Характерные цифры представлены в таблице 2.
Таблица 2
Измеряемый параметр | Доля выпускаемых преобразов. в % от общего числа |
Давление Температура Параметры движения Размеры Расход материалов Эл. и магн. величины Уровень Химический состав Сила Свойства материалов Ядерные излучения Другие | 24 14,5 13,7 10,5 7,5 6,0 4,6 4,0 3,4 3,4 2,2 6 |
Пример:
Какие датчики нужны в современном автомобиле:
Давление: - масла в тормозной системе,
- топлива,
- воздуха в карбюраторной системе.
Положение: - кузова относительно горизонтали,
-рейки топливного насоса.
Уровня: - топлива,
-масла в картере,
-охлаждающей жидкости.
Температуры: - масла,
-охлаждающей жидкости,
-топлива,
-воздуха в всасываюшем насосе,
-воздуха в подкапотном пространстве.
Нагрузки: - на оси.
Углы: - поворота дроссельной заслонки,
- угловые скорости коленвала и колёс.
Координаты, скорость и ускорение – собственно автомобиля.
Сейчас в процессе разработки и внедрения:
- датчики перемещения педали газа, открытия заслонки впрыска;
- измерение быстро переменных давлений в камере сгорания;
- датчики системы антиблокировки колёс;
- датчики ускорений систем безопасности;
- датчики положения узлов дверей, стёкол, люков и. т.п.;
- сигнализаторы остаточной ёмкости аккумулятора;
- сигнализаторы опасности сближения, препятствий;
- системы навигации и диагностики;
- автоматическая балансировка колёс и т. д.
Наиболее быстро прогрессируют в области МСТ датчики измерения параметров движения, химического состава, давления и температуры.
Измерения.
Основные понятия
Обозначим буквой m физическую величину, которую мы измеряем
(температура, давление,…).
Процесс измерения – это совокупность операций направленных на установление численного значения это величины. Часто необходимо преобразовать измеряемую величину в электрическую, в чём-то эквивалентную, причём как можно точнее.
Датчик – это устройство, которое под воздействием измеряемой величины выдает эквивалентный сигнал S, обычно электрический (заряд, ток, напряжение), являющейся функцией измеряемой величины:
S = F(m), |
где S- выходная величина датчика.
m - входная измеряемая величина.
Физическая связь между m и s может быть самой разнообразной, на вид функции влияют материалы, конструкция датчика, технология, окружающая среда и др. Проще всего определять вид функции F экспериментально при градуировке. Но грамотно спроектировать датчик, получать оптимальную точность, чувствительность и другие параметры, его характеризующие, можно только на основе понимания физики его работы и основных количественных соотношений, её характеризующих.
На рисунке приведена типичная градуировочная кривая S=F(m). Стрелки вверх – влево соответствуют процессу градуировки, вправо – вниз использованию градуированной кривой для определения измеряемой величины по отсчёту показаний датчика S:
|
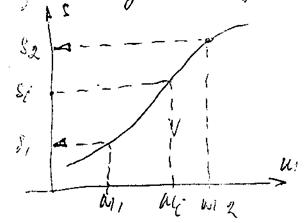
Рис. 2. Градуировочная кривая датчика
Идеальной градуировочной характеристикой является прямая линия, отклонения от неё характеризует нелинейность преобразования.
С точки зрения формирования сигнала датчик может быть активным (генератором), выдающим заряд, напряжение или ток, либо пассивным с выходным сопротивлением, индуктивностью или ёмкостью, изменяющимися под влиянием входной величины. Иногда их называют соответственно генераторными и параметрическими.
В случае, активного датчика выдаваемый им переменный электрический сигнал может измеряться непосредственно или после вспомогательных преобразований. При использовании пассивных датчиков обязательно присутствует электрическая схема, формирующая электрический сигнал. В таблицах 3 и 4 приведены примеры физических эффектов, используемых для построения активных датчиков и преобразований, характерных для пассивных.
Наряду с активными и пассивными возможны комбинированные датчики, реализующие цепочку последовательных преобразований.
Например, давление измеряется с помощью мембраны (первичный преобразователь) деформация которой вызывает изменения сопротивления.
Колоссальное практическое значение имеет вопросы влияния внешней среды (стабильность), погрешностей измерения и др., которые здесь не рассматриваются.
Таблица 3 - Физические эффекты, используемые для построения активных датчиков
Измеряемая величина | Используемый эффект | Выходная величина |
Температура | Термоэлектрический эффект Пироэлектрический эффект | Напряжение Заряд |
Поток оптического излучения | Внешний фотоэффект Внутренний фотоэффект в полупроводниках с p-n переходом Фотоэлектромагнитный эффект | Ток Напряжение Напряжение |
Сила, давление, Ускорение | Пьезоэлектрический эффект | Заряд |
Скорость | Электромагнитная индукция | Напряжение |
Перемещение | Эффект Холла | Напряжение |
Таблица 4 - Физические принципы преобразования величин, используемых для построения пассивных датчиков
Измеряемая величина | Электрический параметр, изменяющийся под действием измеряемой величины | Используемые материалы (тип) |
Температура Сверхнизкие температуры Поток оптического излучения Деформация Перемещение Влажность Уровень | Сопротивление Диэлектрическая проницаемость Сопротивление Сопротивление Магнитная проницаемость, сопротивление, ёмкость Диэлектрическая проницаемость, сопротивление Диэлектрическая проницаемость, коэффициент преломления | Металлы (платина, никель, медь), полупроводники Стекло, керамика Полупроводники Сплавы никеля, легированный кремний Ферромагнетики магниторезистивные материалы, висмут, антимонид индия Хлористый литий, окись алюминия, полимеры. Жидкие материалы |
Метрологические характеристики
Датчик являются первым элементом измерительного канала, поэтому обязательно должны оцениваться их метрологические характеристики. Мы не будем их изучать подробно, но хотя бы перечислим и определим некоторые понятия.
1. Погрешность измерения
Истинное значение измеренной величины не знает никто. Можно только зафиксировать общую реакцию измерительной системы на воздействующий фактор (и это тоже приблизительно, т. к. на систему измерений влияют и другие факторы). Эта реакция, выраженная в единицах измеряемой величины, есть измеренное значение. Разность между измеренным значением и истинным значением есть погрешность измерения. Понятно, что и погрешность измерения можно оценить только приближенно, поскольку неизвестно истинное значение. Если это понимать и принимать определённые меры, то можно оценить значение измеряемой величины с известной точностью.
Погрешности разделяют на систематические и случайные.
Систематические погрешности возникают по следующим причинам:
1) Погрешности значения опорной величины (смещение нуля прибора, неточность опорного напряжения, температурная погрешность и др.).
2) Погрешности характеристик датчика (линейность различных образцов отличается, старение датчика).
3) Погрешности, связанные со способом или условиями применения – датчик всегда влияет на исследуемую систему. Сюда же относятся ошибки, связанные с временными параметрами (время установления сигнала), влияние саморазогрева датчика и исследуемого объекта и др.
4) Дефекты обработки данных измерений (ручных или автоматических).
Случайные погрешности. Здесь можно выделить 2 группы факторов.
1) Погрешности, связанные с собственными параметрами измерительной аппаратуры:
Порог чувствительности - ниже определённого предела εi датчик уже не реагирует на вариации сигнала.
Погрешность считывания εn - это характерно не только для оператора, но и для автоматики тоже - на какие вариации сигнала она способна отреагировать. В сумме эти две погрешности образуют погрешность разрешения εp:
![]() .
.
Погрешность гистерезиса проявляется в наличии зависимости выходного сигнала от предшествующих состояний измерительной системы.
Погрешность квантования – возникает, если в измерительной системе есть АЦП.
2) Погрешности (связанные с внешними факторами) от наличия в измерительной цепи паразитных сигналов случайного характера (это шумы, наводки, флюктуации напряжений питающих устройств, временной дрейф и др.).
2. Пределы применимости датчиков
Их много.
Это, во-первых, условия, где они могут работать. Причём пределы эти могут соответствовать области номинального значения параметров датчика:
- области обратимого ухудшения параметров,
- области необратимого ухудшения параметров.
Во-вторых, каждый датчик имеет ограниченный диапазон измерения величины. Для одного и того же датчика эти пределы измерения могут быть различными, например, при соблюдении той или иной точности.
3. Чувствительность.
В общем случае чувствительность S определяется как отношение вариации сигнала ΔS на выходе к изменению Δm измеряемой величины, вызываемую эту вариацию сигнала:
 .
.
В общем случае чувствительность определяется при данном уровне измерений величины.
m = mi
Размерность S определяется природой датчика, например, мкВ/°С - чувствительность термопары.
Важный параметр, от которого зависит чувствительность, является скорость (частота) изменения измеряемой величины. Различают статический режим работы (изменение во времени очень мало) и динамический режим работы. Некоторые датчики работают только в динамическом режиме (микрофон).
Изменение чувствительности в функции от частоты, связаны с механической, тепловой или электрической инерцией датчика и схемы обработки сигнала.
Выраженная в наиболее общей форме связь между величинами S и m представляет собой дифференциальное уравнение первого или второго порядка. Его решение определяет зависимость S и m в диапазоне частот по модулю и фазе.
4. Линейность характеристики.
Система линейна в том диапазоне измеряемых величин, где её чувствительность не зависит от значения измеряемой величины. Это удобно, поэтому даже если датчик нелинеен, в измерительную систему вводят элементы линеаризации (т. е. коррекции).
5. Быстродействие датчика – параметр позволяющий оценить, как выходная величина успевает следить во времени за изменениями измеряемой величины. Характер переходного процесса не зависит от закона изменения измеряемой величины, а только от свойств измерительной системы.
2. Схемы формирования сигналов пассивных датчиков
Итак, измеренная величина m изменяет, например импеданс Zс пассивного (параметрического) датчика. Эти изменения могут быть преобразованы датчиком в электрический сигнал путем включения в измерительную схему с источником напряжения εs или тока Is. Схема сама характеризуется собственным импедансом Zk и измеряемая величина преобразуется в напряжение выходного электрического сигнала:
Vm = εs P(Zk, Zc).
Проще всего это достигается применением потенциометрических или мостовых схем. В более сложных генераторных схемах измеряемая величина преобразуется в изменение частоты
Fm = G(Zk, Zc).
Генераторы могут быть источниками синусоидальных и прямоугольных сигналов; информация содержится в частоте этих сигналов, ширине импульсов, что повышает помехозащищенность системы. Есть системы с временной модуляцией.
Потенциометрические и мостовые схемы проще, в них источником питания может служить источник постоянного или переменного тока. В последнем случае выходной сигнал схемы является результатом моделирования питающего напряжения сигналом Zc. Если питание переменное, необходимо чтобы частота источника минимум в 5 раз превышала максимальную частоту изменения измеряемой величины. Для извлечения информации, выходной сигнал нужно продетектировать и отфильтровать.
Рассмотрим сначала самые простые схемы.
Потенциометрические схемы с резистивными датчиками
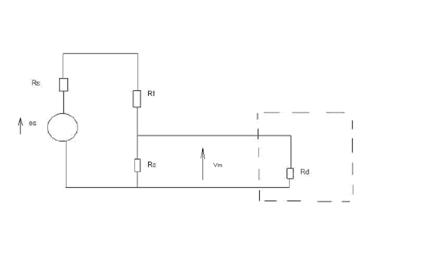
Рис. 3. Схема включения резистивного сенсора
Датчик с сопротивлением Rc, изменяющимся под действием измеряемого фактора (например, тензорезистор), включен последовательно с постоянным резистором R1 (в некотором смысле его можно назвать нагрузочным). Схема питается от постоянного или переменного источника с ЭДС εs и внутренним сопротивлением Rs и измеряется прибором с выходным сопротивлением Rd. Легко получить:
 .
.
Если Rd>>Rc, что обычно обеспечивается, то
и является нелинейной функцией Rc. Желательно эту функцию ленеаризировать, т. е. получить измененное ΔVm пропорционально вариациям ΔRc сопротивления датчика. Этого можно добиться разными путями, например, можно ограничиться работой на малом участке характеристики изменения сопротивления. Сопротивление датчика меняется от Rc0 до Rc0+ΔRc, вызывая изменения напряжения от Vm0 до Vm0+ΔVm. Зависимость ΔVw от Rc можно получить, взяв дифференциал от Vm и переходя к малым приращениям, т. е. полагая
 .
.
 .
.
Эта зависимость линейна при малых ΔRc. Максимальная чувствительность схемы получится при Rs+R1=Rc0; в этом случае
 .
.
Дифференциальное включение датчиков
Для компенсации воздействия влияющих величин (температуры, помех) используют вариант схемы в которой вместо резистора R1 включен второй датчик,(рис.4), идентичный по чувствительности первому, но с противоположным по знаку изменением –ΔRc, т. е. один имеет вариацию сопротивления + ΔRc а другой – ΔRc. Для нее можно получить
 .
.
Если Rs<<Rc0, то чувствительность схемы с дифференциальным включением датчиков вдвое больше предыдущей
![]()
 .
.
Рис. 4. Дифференциальное включение датчиков
Недостатком потенциометрических схем является наличие в выходных сигналах постоянной составляющей, не содержащей полезной информации. Кроме того, ее колебания (т. е. колебания напряжения источника питания еs) воспринимаются схемой как сигнал, т. е. привносит ошибку. Поэтому используют мостовые схемы.
Использование мостовых схем
Чаще всего тензорезисторные (или другие первичные преобразователи сигнала) включаются по мостовой схеме. Это позволяет существенно повысить чувствительность датчиков, особенно в области малых сигналов (на пороге чувствительности), а также линейность, помехозащищённость и температурная стабильность датчиков. Мосты могут быть на резисторах или ёмкостях.
Разберёмся в работе мостовой резисторной схемы (рис.5) (аналогично работает емкостной мост) на примере моста постоянного тока.
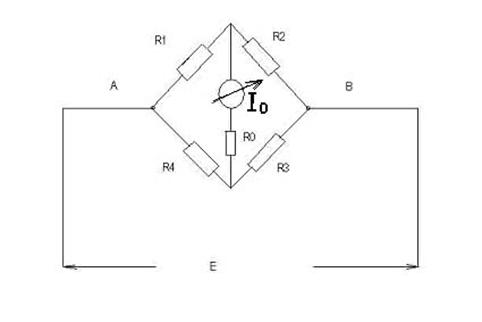
Рис 5. Мостовая резисторная схема
Если мост в равновесии и ток в диагонали отсутствует I0=0, то потенциалы точек С и Д одинаковы; тогда точки через резисторы тоже попарно одинаковы, I1=I2; I3=I4. Поэтому выполняется условие:
I1 R1 = I4 R4,
I2 R2 = I3 R3.
Взяв отношения левых и правых частей этих равенств, получим
 ,
,
или
R1R3 = R2R1.
То есть, для получения баланса необходимо, чтобы произведения сопротивлений резисторов в противоположных плечах моста были одинаковы.
Обычно мост сбалансирован в точке, соответствующей нулевому значению измеряемой величин. При внешнем воздействии, которое подлежит измерению одно, два или все четыре сопротивления изменяются и баланс моста нарушается, что приводит к разности потенциала между точками С и Д, к появлению тока в измерительной диагонали I0.
При небольших разбалансах моста можно получить близкую к линейной зависимость между током I0 (или разболасом напряжений между точками С и Д равным U0) и внешним воздействием, т. е. проградуировать прибор I0 в единицах измерения фактора, вызывающего изменение сопротивления резистора. В случае больших разбалансов необходимо сбалансировать мост искусственным изменением сопротивления одного из плеч. В этом случае мост выступит в роли индикатора баланса.
Связь между токами (напряжением) моста и значениями сопротивлений резисторов в общем случае можно установить, используя методы контурных токов или узловых напряжений. В принципе это не очень сложно, но достаточно громоздко. Поэтому приведём сразу расчётные соотношения для различных случаев питания моста и измерения разбаланса.
1. Источник питания имеет ЭДС еs с внутренним сопротивлением Rs; в измерительной диагонали измеряется ток I0:
 ,
,
где
A=R0(R1+R2+R3+R4)+(R1-R4)(R2+R3);
B=R0(R1+R2)(R3+R4)+R1R4(R2+R3)+R2R3(R1+R4).
2.Мост питается от стабильного источника напряжения U; измеряется ток I0:
 .
.
3. Мост питается от источника тока I, измеряется I0:
 .
.
4. Ток в измерительной диагонали практически не потребляется (R0 велико), измеряется U0 устройством с высокоомным входом; мост питается от источника ЭДС es с сопротивлением Rs:
 .
.
5. Мост питается напряжением U, измеряется U0:
 .
.
6. Мост питается стабильным током I, измеряется U0:
 .
.
Под чувствительностью Sm мостовой схемы обычно понимается изменение ΔI (ΔU0) или мощности ΔP0 в диагонали моста, приходящееся на единицу относительного изменения сопротивлений плеч моста, т. е.
 ,
,  ,
,  .
.
Можно доказать, что максимальная чувствительность моста получается при равенстве сопротивлений его плеч R1 = R2 = R3 = R4. При этом приведённые расчётные соотношения существенно упрощаются.
Понятно, что при использовании мостовых методов для измерения каких – либо физических величин, для повышения чувствительности целесообразно включать резисторы, изменяющиеся в одну сторону, в противоположных плечах места, т. к. это увеличивает разбаланс при изменении сопротивлений.
Расчёт мостового чувствительного элемента
Пусть мост питается стабильным питанием и с его диагонали снимается напряжение U, тогда (вариант 5):
 .
.
Предположим, что все резисторы для повышения чувствительности выбраны одинаковыми по величине, и мост сбалансирован, тогда U0 = 0.
Нас интересует зависимость U0 от изменения одного (или нескольких) сопротивлений, величина которых меняется по каким – либо причинам, в частности, от давления. Если это сопротивление R1, то нас интересует зависимость
 .
.
Определим её. Для этого возьмём производную от исходного выражения для U0 по R1:

Перейдя к малым конечным приращениям dR=∆R, dU0=ΔU0 и полагая R1=R2=R, получим
 .
.
Если одновременно изменяются (в одну сторону) 2 резистора, их целесообразно включить в противоположные плечи моста и чувствительность удваивается, т. е.
 ,
,
Если активны все 4 резистора с попарно противоположными знаками приращения, чувствительность снова удваивается и
 .
.
Далее полученный сигнал обычно усиливается и поступает на дальнейшую обработку (рис. 6).
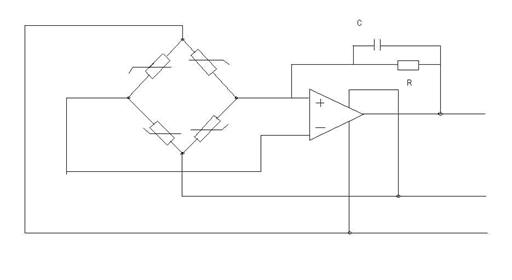
Рис. 6. Измерительный мост со схемой интерфейса
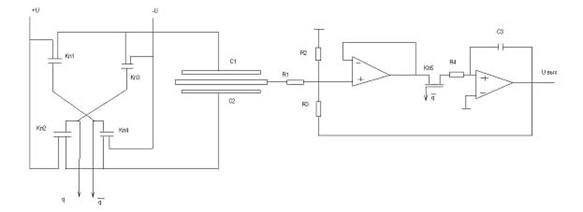
Емкостные преобразователи перемещений
Емкостные преобразователи представляют собой конденсаторы, у которых одна из обкладок может перемещаться, в связи с чем происходит изменение емкости. Это изменение емкости фиксируется по изменению потенциала, частоты или другими способами. Очень часто такие датчики делают симметричными, чтобы повысить чувствительность и точность. Например, чувствительный элемент прибора является подвижной обкладкой, а неподвижный электрод расположен на элементах корпуса (рис. 7).
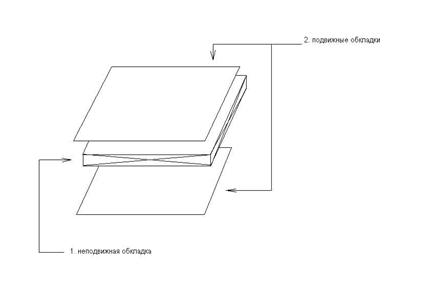
а
б
Рис.7. Схематическое представление ёмкостного датчика перемещение (а) и расчётная модель (б)
Рабочие ёмкости
![]() ,
,
где h0 – начальный зазор между электродами, Δh – смещение подвижных электродов относительно центрального, S – площадь перекрытия электродов.
Исключить изменение площади взаимного перекрытия при перемещении электрода можно, сделав площадь одного из электродов меньше площади другого или пересечением площадей.
Следует учитывать, что между каждой парой электродов существует силовое взаимодействие (тяжение), сила которого определяется формулой
 ,
,
где q – электрические заряды на электродах.
Тяжение электродов может приводить в пределе к залипанию электродов и потере работоспособности. Конструкции электродов разнообразны (в интеграции с устройством МСТ), например, рис.8.
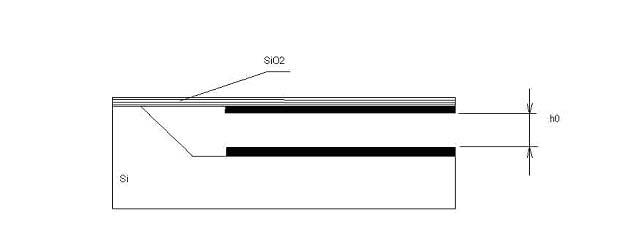
Рис. 8. Один из вариантов микросистемного емкостного датчика перемещения
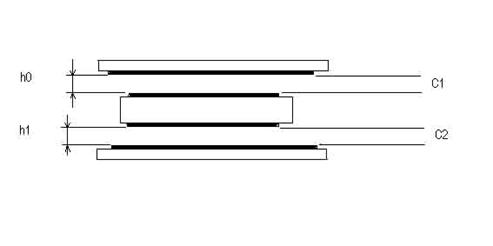
Типовая схема использования емкостного преобразователя, для фиксации перемещений приведена на рис. 9.
(а)

(б)
Рис. 9. Типовая схема емкостного датчика перемещений (а) и её механическая модель (б).
Мост здесь необычный – два плеча представляют собой дифференциальные измерительные емкости С1 и С2, а два других плеча – источники опорного напряжения +U и –U, которые с помощью ключей схемы подключаются к диагонали, образованной измерительными емкостями, то в одной, то в другой полярности. Управление ключевой схемой осуществляется меандром. Для наглядности, на рис. 9, б представлена механическая модель коммутации.
Резистор R1 – большой (примерно 1 МОм), с тем чтобы не нагружать мост измерительной схемой.
Измерительные емкости С1 и С2 включены последовательно и с помощью ключей К1-К4 за первый полупериод меандра заряжаются в одном направлении, а за второй перезаряжаются в противоположном. При равенстве абсолютных значений источников положительного и отрицательного опорных напряжений, напряжение в измерительной диагонали равно
 .
.
Если подставить значение С выраженное через h получим
![]()
 .
.
Т. о. напряжение в измерительной диагонали линейно зависит от изменения зазора между электродами, т. е. перемещения. Выходное сопротивление измерительной диагонали высокое, а уровень сигнала обычно не велик (обычно очень малы абсолютные значения С1 и С2), поэтому необходимо использовать усилитель – повторитель сигнала на операционном усилителе. Он же сравнивает сигналы моста и цепи обратной связи. Резисторы R1 и R2 выполнены одинаковыми.
Дальнейшая обработка может быть организованна по-разному.
На рис. 9, а последний каскад является интегратором. Он так же с помощью ключа 5 (синхронный детектор) позволяет определить направление (полярность) разбаланса.
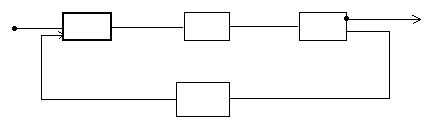
3. РАЗОМКНУТАЯ И ЗАМКНУТАЯ СТРУКТУРА ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ ДЛЯ ДАТЧИКОВ
В рассмотренных двух примерах включения моста (резистивного и емкостного) использованы различные структуры измерительных устройств. В датчике на основе терморезистора применена так называемая разомкнутая структура измерительного устройства (приборы с такой структурой иногда называют приборами сопоставления). В таких устройствах все преобразования от входной измеряемой величины Х до выходной W (которая как-то используется, например, кодируется для передачи, запоминается или подается на индикатор) имеют одно направление - от входа к выходу. Здесь нет обратной связи с выхода на вход, и схема содержит последовательно включенные линейные звенья (рис. 10), причем  .
.
 W
W
K1 K2 K3 G
x
Рис. 10. Разомкнутая структура измерительной системы
Ясно, что в такой системе стабильность, точность и чувствительность напрямую зависят от стабильности, точности и величины коэффициента передачи составляющих звеньев.
В частности, погрешность преобразования можно характеризовать средним квадратичным отклонением, которое через погрешности отдельных звеньев цепи определится известной формулой квадратичного суммирования случайных величин
Более сложными и более совершенными являются измерительные устройства с замкнутой структурой. В них используется компенсационный принцип измерения и их правомерно рассматривать как частный случай систем автоматического управления (САУ). В частности, примером такой системы является рассмотренный ранее емкостной датчик перемещения.
В достаточно общем виде структура такой системе представлена на рис. 11.
X 1 Y =K1(X-X0) 2 Z=K2Y 3 W=K3Z
X0
X0=KобрW 4 W
Рис.11. Замкнутая структура измерительной системы.
Устройство содержит две цепи: прямого преобразования (блоки 1 , 2 и 3, их может быть и больше) и цепь обратной связи (на рис. блок 4). Измеряемая величина Х подается на вход первого блока 1. Его называют часто устройством сравнения, решающим преобразователем или сумматором. В нем происходит сравнение входной величины Х с однородной ей по природе величиной Хо , поступающей из цепи обратной связи (блок 4) и строго пропорциональной выходной величине W.
В результате сравнения вырабатывается сигнал некомпенсации (разбаланса, раскомпенсации) величин Х и Хо, т. е.
Y=К1(Х-Хо). (1)
Этот сигнал усиливается и преобразуется в блоках 2 , 3 цепи прямого преобразования, так что
W=K2K3Y=K1K2K3(X-X0)=Kпр(X-X0),
где Кпр = К1К2К3 - коэффициент передачи преобразования цепи прямого преобразования.
Цепь обратного преобразования, которая также может быть сложной, представлена блоком 4. На его входе имеем сигнал W на выходе
Х0=КобрW. (2)
Совместное решение (1) и (2) дает
W=(Кпр/(1+КпрКобр))Х = КХ, (3)
где К-общий коэффициент сложного преобразования устройства с обратной связью.
Из (3) видно, что К < Кпр.
Нетрудно убедиться, что такая система отслеживает (в другом масштабе и может быть в другой физической форме) измеряемое значение Х. Действительно, при расхождении Х и Х0, возникающее рассогласование (Х-Х0) усиливается, и выходной сигнал W изменяется до тех пор, пока пропорциональный ему Х0 не сравняется с измеряемой входной величиной Х. Таким образом, в равновесии всегда Х=Х0, а W=Х0/Кобр, т. е. при Кобр=const величина W несет информацию о значении Х0, а следовательно и Х.
Чтобы понять для чего нужен такой подход при проведении измерений, проанализируем погрешность системы. Из (3) видно, что погрешность выходного сигнала W определяется погрешностью коэффициента сложного преобразования
К=Кпр/(1+Кпр Кобр), (4)
т. е. в конце концов погрешностями Кпр и Кобр . Установим связь между этими погрешностями. В начале найдем полный дифференциал выражения (4):
dK=((1+КпрКобр)dK-Кпр Кобр dКпр-К²пр dКобр)/(1+Кпр Кобр)²
Переходя к малым конечным приращениям, получим
∆К=∆Кпр/(1+Кпр Кобр)²-К²пр ∆Кобр/(1+Кпр Кобр)² (5)
Для перехода к относительным погрешностям поделим обе части выражения (5) почленно на (4) и получим
∆К/К=(1/(1+Кпр Кобр)) (∆Кпр/Кпр)-Кпр Кобр/((1+Кпр Кобр)) (∆Кобр/Кобр) (6)
Поскольку в подавляющем числе случаев КпрКобр>>1, последнее выражение можно записать в виде
∆К/К=((1/Кпр Кобр)) (∆Кпр/Кпр)-(∆Кобр/Кобр)=-∆Кобр/Кобр . (7)
Это значит, что относительная погрешность сложного преобразования в замкнутом измерительном контуре с отрицательной обратной связью, в которой Кпр Кобр>>1, практически не зависит от погрешности передачи в прямой ветви контура и определяется, в основном, погрешностью цепи обратной связи.
Формула (6) справедлива как для систематических, так и для случайных погрешностей.
В последнем случае вместо конечных приращений нужно воспользоваться среднеквадратичным отклонением σ и суммировать погрешности квадратично, т. е.:

Поскольку, как отмечалось, влияние погрешности (в том числе относительной и достаточной большой) прямой ветви преобразования невелико в силу того, что КпрКобр>>1. Общая относительная погрешность измерений будет определяться качеством цепи обратной связи, которую можно выполнить достаточно точной и стабильной, т. е.
σ (∆К/К)= σ(∆Кобр/Кобр).
Практически это позволяет создавать точные и надежно работающие датчики с использованием простых и дешевых схем транзисторных усилителей в цепи прямого преобразования.
Рассмотренный способ построения замкнутой системы измерений является частным случаем следящей системы или системы автоматического регулирования. Такие системы воспроизводят на выходе (с определенной точностью) входное задающее воздействие, которое изменяется во времени по заранее неизвестному закону. Большое значение имеют динамические свойства таких систем, тесно связанные с их устойчивостью.
4. О физических свойствах веществ и эффектах в них, использованных в изделиях МСТ. Понятие тензора
Вы изучили курс материалов, где в основном рассматриваются их свойства. Останавливались мы также на структуре кристаллической решетки, в частности рассматривали свойства кристаллов кремния в связи с его структурой. Уже ясно, что это важно в технологии (например: при анизотропном травлении), но это – одна сторона вопроса. В МСТ широко используются разнообразные физические эффекты в материалах, в том числе кристаллах. В частности, физические эффекты широко используются в сенсорике, при создании датчиков, где решающую роль играют эффекты, связанные с преобразованием одной физической величины в другую, которая легче измеряется. Широко (и не только для создания сенсоров) используются оптические эффекты в кристаллах в их связи с деформацией кристаллов, например, за счет ультразвуковых колебаний. Таких эффектов – многие десятки и далеко не все из них используются. Мы ограничимся кратким изложением подходов к описанию таких эффектов и нескольких примеров. Полнее они изучаются, например, в кристаллофизике, хотя некоторые из них имеют место и в аморфных материалах.
О тензорном описании физических свойств кристаллов
Вследствие анизотропии свойств кристаллов явление, вызванное в кристалле каким либо воздействием (т. е. реакция кристалла на это воздействие) не совпадает по направлению с этим воздействием. Вообще связь между воздействием, направленным на какое-то свойство кристалла и явлением (реакций кристалла) представляет соотношением
Явление = свойство ·воздействие.
Если воздействие и реакции на него скалярны, то и соответствующее свойство изотропно (скалярно). Простейший пример: связь плотности и температуры. Здесь бессмысленно говорить о направлении. Значение скаляра полностью определяется заданием одного числа. Скаляры можно назвать тензорами нулевого ранга. Такие величины не меняются при переходе от одной системы координат к другой.
Векторы – (тензоры 1-го ранга) представляют физические величины, которые могут быть определены только по отношению к направлению. Пример: механическая сила, приложенная в некоторой точке, будет определена как величиной, так и направлением. Векторами является напряженность электрического и магнитного поля, момент магнитного диполя, градиент температуры и пр.
В прямоугольной системе координат вектор задается компонентами вектора вдоль координатных осей, т. е.
E = (E1,E2,E3).
Вектор называется тензором первого ранга. Операции с векторами являются предметом векторного анализа (правила скалярного и векторного произведения, понятия градиента, дивергенции, ротора и пр.).
Тензоры второго ранга. Понятие вектора можно расширить. Рассмотрим пример с плотностью электрического тока сначала в изотропной среде. Если к проводнику приложено электрическое поле E, то плотность j (тоже вектор) пропорциональна E и совпадает по направлению с вектором E, т. е.
j =τ E,
где τ - электропроводность. (Предполагается, что закон Ома справедлив).
В координатах x1, x2, x3
j = [j1,j2,j3] и E = [E1,E2,E3],
причем
j1 = τ E1, j2 = τ E2, j3 = τ E3.
Каждая компонента j пропорциональна соответствующей компоненте E.
Теперь поговорим о кристалле, анизотропном по электропроводности, это значит, что электропроводность зависит от направления и векторы E и j не будут совпадать по направлению, т. е.
j1 = τ11 E1 + τ12 E2 + τ13 E3,
j2 = τ21 E1 + τ22 E2 + τ23 E3,
j3 = τ31 E1 + τ32 E2 + τ33 E3.
Здесь τ11, τ12 ..... константы (их 9). Каждая компонента j линейно зависит от всех трех компонент E.
В частности, если поле приложено вдоль одной из осей, например, x1, т. о.
E = (E1,0,0),
причем
j1 = τ11 E1,
j2 = τ21 E1,
j3 = τ31 E1.
Т. е. вектор j все равно имеет составляющие по всем трем осям.
Т. о., чтобы определить электропроводность анизотропного кристалла необходимо задать девять коэффициентов вида τ11 , τ12 , … .
Для удобства их можно записать в виде квадратной таблицы:
τ11 τ12 τ13
τ21 τ22 τ23
τ31 τ32 τ33.
Такая таблица называется тензором второго ранга; τ11 , τ12 , τ13 составляют компоненты тензора.
В результате получим три типа величин:
а) Тензор нулевого ранга (скаляр), определяется единственным числом, не зависящим от системы координат.
б) Тензор первого ранга (вектор), определяется тремя числами (компонентами), связанными с осями координат.
в) Тензор второго ранга определяется девятью числами (компонентами) каждое из которых связано с парой осей координат, взятых в определенном порядке.
При этом число индексов равно рангу тензора. Приводят также тензоры третьего и четвертого рангов, о них позже. Все сказанное справедливо не только для электропроводности.
В общем случае, если свойство Т связывает два вектора p(p1,p2,p3) и g(g1,g2,g3),
таким образом, что
p1 = T11 g1 + T12 g2 + T13 g3,
p1 = T21 g1 + T22 g2 + T23 g3, (8)
p1 = T31 g1 + T32 g2 + T33 g3.
где T11, T12,….- константы, то говорят, что T11, T12,…. образуют тензор второго ранга.
Т11 T12 T13
T21 T22 T23
T31 T32 T33
В таблице 5 приведены некоторые примеры свойств, описываемых тензорами второго ранга.
Таблица 5
Тензорное свойство | Воздействие | Явление, эффект |
Удельная электропроводность Коэффициенты теплопроводности Диэлектрическая проницаемость Диэлектрическая восприимчивость Магнитная проницаемость Магнитная восприимчивость | Напряженность электрического поля Температурный градиент Напряженность электрического поля То же Напряженность магнитного поля То же | Плотность электрического тока Плотность теплового потока Электрическая индукция Диэлектрическая поляризация Магнитная индукция Намагниченность |
Сокращенная запись.
Уравнение (8) можно записать в виде:
p1 =∑3j=1 Tij gj,
p2 =∑3j=1 Tij gj, (9)
p3 =∑3j=1 Tij gj,
или еще компактнее
pi =∑3j=1 Tij gj (I =1,2,3). (10)
Теперь опустим знак суммирования
pi = Tij gj, (i, j =1,2,3 , (11)
введя правило суммирования (по Эйнштейну): если в одном и том же члене индекс (j) повторяется дважды, то автоматически подразумевается суммирование по этому индексу.
Индекс j в уравнениях (8) – (11) называется индексом суммирования (немым индексом), индекс i называется свободным.
В уравнении, записанном в сокращенной форме, свободные индексы должны быть одинаковы во всех членах уравнения в обеих его частях, а индексы суммирования должны встречаться по два раза в каждом члене суммы.
Можно сказать, что индексы суммирования суммируют соотношение между векторами p и g в кристалле. Выражение (11) для изотропного кристалла упрощается:
pi = T gj, (12)
где T= const.
Сокращенно тензор, характеризующий свойство кристалла, обозначают [Tij],
иногда скобки опускают: Tij. Точно также вместо p(p1,p2,p3) обозначают [pi] или просто pi.
Важный для практики вопрос о преобразовании координат тензора мы не рассматриваем.
Тензорное описание воздействий на кристалл (электрические, механические и тепловые воздействия)
Электрическое воздействие
Для описания воздействия электрического поля на кристалл и реакции на это воздействие используются три векторные величины:
E – интенсивность или напряженность электрического поля;
p – вектор поляризации или электрический момент диполя, направленный вдоль оси диполя, образовавшегося при поляризации диэлектрика, от отрицательного заряда к положительному, и равный произведению величины наведенных зарядов на расстояние между ними;
D – вектор электрического смещения или индукции.
В общем случае связь между ними задается выражением:
D = ε0E + p (13)
где ε0 = 8,85*10-12 Ф/м – диэлектрическая проницаемость вакуума.
При этом p = ε0χ E, где χ – диэлектрическая восприимчивость. Индукция D является векторной суммой воздействия Е и реакции на это воздействие р.
Очевидно, что
D = ε0E + ε0χ E = ε0(1 + χ) E,
где ε = ε0(1 + χ) – диэлектрическая проницаемость диэлектрика.
Часто пользуются понятием диэлектрической постоянной или относительной диэлектрической проницаемостью
K = (1+ χ)/ ε0
тогда
D = ε0 K E.
В изотропном диэлектрике векторы D, E и p коллинеарны, а параметры χ и ε скалярны.
Для анизотропного диэлектрика картина усложняется. Заряды при поляризации смещаются не по направлению электрического поля и векторы D, E и p не совпадают по направлению (рис. 12).
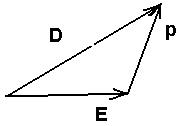
Рис. 12. Направление векторов Е, р и D в анизотропном кристалле.
Т. о. поле E, направленное, например, вдоль одной оси координат, создает в кристалле индукцию D, имеющую компоненты по всем трем координатам:
Di = f(E1,E2,E3).
В общем случае можно записать
D1 = ε11 E1 + ε12 E2+ ε13 E3,
D2 = ε21 E1 + ε22 E2+ ε23 E3,
D3 = ε31 E1 + ε32 E2+ ε33 E3.
Девять величин ε11, ε12,…. ε33 образуют тензор второго ранга, характеризующий диэлектрическую проницаемость кристалла: εij. Он характеризует кристалл и не зависит от выбора системы координат. К каким эффектам это может привести, рассмотрим ниже.
Пока же отметим очевидный факт: под действием внешнего электрического поля в кристалле могут возникать как продольные, так и поперечные эффекты.
Таким образом, для анизотропной среды справедливо:
Di = εij Ej, (14)
где εij – тензор диэлектрической проницательности, являющийся параметром анизотропной среды, т. е. тензором материальным.
Механические воздействия
Если тело находится под действием внешних сил или даже если любая часть тела находится под механическим воздействием соседних частей, то говорят, что тело находится в напряженном состоянии.
Выделим в теле некоторый элемент, находящийся в напряженном состоянии. Силы, на него действующие, можно разделить на два типа. Во-первых, объемные силы, действующие на все элементы тела, (например, сила тяжести). Они пропорциональны объему элемента. Во-вторых, силы, действующие на поверхность элемента со стороны окружающих его частей тела. Они пропорциональны площади поверхности элемента. Эти силы, отнесенные к поверхности элемента называются напряжением. Обозначим напряжение буквой T. Это – вектор упругих напряжений.
Если разложить напряжение по координатным осям (рис. 13) , можно выделить нормальные и сдвиговые компоненты напряжений.
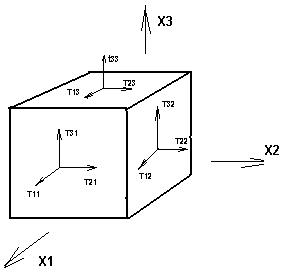
Рис. 13. Векторы напряжений на поверхности элементарного куба
Напряжение в кристалле описывается тензором второго ранга Tij. Он имеет принципиальные отличия от введенных раньше тензоров электрической проводимости и диэлектрической проницаемости, которые описывали физические свойства собственно кристалла и являлись его неотъемлемой характеристикой, жестко связанной со структурой (симметрией) кристалла. Это были так называемые материальные тензоры.
Тензор напряжения не описывает каких либо физических свойств кристалла, может иметь любую ориентацию и имеет смысл как для анизотропных, так и изотропных тел. По смыслу он близок к силе, действующей на кристалл. В этом рассмотрении он подобен электрическому полю, которое также может быть приложено к телу в произвольном направлении. Такие тензоры называют полевыми тензорами или тензорами воздействия.
Под действием напряжений в теле возникают деформации. Деформации, если они невелики, подчиняются закону Гука – основному закону теории упругости – а именно деформация, возникающая в теле под действием силы, пропорциональна этой силе. Деформация является упругой, если после прекращения действия силы форма тела полностью восстанавливается.
Для изотропных тел закон Гука выражается формулой
T = δс,
или
δ = sT,
здесь T – напряжение,
δ – деформация,
с – жесткость(константа упругости, постоянная жесткости),
s – податливость.
Смысл коэффициентов с и s ясен из названия. В анизотропных телах жесткость и податливость является тензорными величинами, т. е. зависит от направления. Естественно, и деформация будет характеризоваться тензором. Тензором же описывается напряжение.
Таким образом, каждая компонента тензора деформации δij связана с каждой компонентой тензора Tki соотношением
δ11 = s1111 T11 + s1112 T12+ s1113 T13+ s1121 T21+ s1122 T22+ s1123 T23+ s1131 T31+
+ s1132T32+ s1133 T33
и еще восемью аналогичными выражениями для δij , в каждое из которых входит девять коэффициентов sijkl, образующих тензор четвертого ранга в матрице которого содержится 81 компонента.
Коэффициент cijkl также образует тензор четвертого ранга.
В тензорной форме для анизотропной среды закон Гука принимает форму:
Tij = δkl cijkl,
или
δij = sijkl Tkl.
Смысл последних выражений заключается в том, что деформация кристалла зависит не только от направлений и типа проложенного напряжения. Если одноосное растягивающее напряжение в изотропном материале вызвало бы только растяжение вдоль той же оси и некоторое сокращение поперечного сечения, то в анизотропном кристалле оно может вызвать растяжение, сжатия и сдвиги в любых направлениях в зависимости от симметрии кристалла.
Тепловое расширение
Отмечено, что деформация – полевой тензор, но если внешнее воздействие изотропно, а тело анизотропно, то деформация будет согласовываться со структурой кристалла. Пусть происходит однорядное изменение температуры (скалярное воздействие), тогда все компоненты тензора деформаций будет(в первом приближении) пропорциональны малому изменению температуры Δt
δij = αij Δt,
где коэффициенты теплового расширения αij – постоянные, образующие материальный тензор второго ранга,
α11 α12 α13
α21 α22 α23
α31 α32 α33.
Здесь α11, α22, α33 - главные коэффициенты теплового расширения вдоль осей x1, x2 ,x3.
Т. о. деформация по осям составит
δ11 = α11 Δt
δ22 = α22 Δt
δ33 = α33 Δt.
Важно отметить, что кристалл расширяется неодинаково вдоль трех главных осей. Если из кристалла вырезать шар, то в результате теплового расширения он превратится в трехосный эллипсоид.
5. Взаимная связь физических свойств и явлений в кристаллах
При описании свойств кристаллов обычно отдельные свойства и явления в них выделяются искусственно и рассматриваются независимо друг от друга. В действительности свойства кристаллов взаимосвязаны и при внешних воздействиях возникают несколько явлений переплетающихся друг с другом.
Так, при нагреве кристалла естественно происходит изменение его энтропии и теплового расширения, но при этом возникают термоупругие напряжения, а они, в свою очередь, вызывают электрическое поле вследствие пироэлектрического эффекта.
Воздействие электрического поля создает электрическую поляризацию, электростатический эффект, приводит к изменению размеров и механическим напряжением (обратный пьезоэлектрический эффект).
Одно и то же явление может быть вызвано разными воздействиями за счет разных свойств кристалла. Например, механическая деформация может быть связана с
- упругостью при механическом воздействии,
- пьезоэлектрическим эффектом под действием тока,
- тепловым расширением.
Таким образом от условий опыта зависит, что считать воздействием, а что – эффектом, так как свойства проявляются и могут быть использованы в сложном взаимодействии.
В некоторых случаях удается обобщить представления о взаимной связи физических свойств кристаллов. Обобщение сделано, например, для тепловых, механических и диэлектрических свойств диэлектрического кристалла. При этом необходимо соблюдать два условия: линейность процессов и их термодинамическая обратимость.
Выберем в качестве основных воздействий (независимых переменных) механическое напряжение Т, напряженность электрического поля E, температуру t и поместим их во внешние вершины треугольной диаграммы (рис. 14). Обусловленные этими воздействиями основные эффекты расположены в вершинах внутреннего треугольника. Обсудим их.
1) Механическое напряжение T создает деформацию δ, подчиняющуюся при малых значениях Т и δ закону Гука. Эффекту деформации соответствует отрезок 1 на диаграмме.
2) Воздействие электрического поля Е приводит к поляризации диэлектрика и создает электрическое смещение D (отрезок 2 на диаграмме).
3) Изменение температуры dt, вызывает изменение энтропии dU:
dU=C/t · dt,
где С - теплоемкость.
Эта связь представлена отрезком 3.
В диаграмме все линии связей между вершинами треугольников имеют определенный смысл. Так прямые связи внешних вершин характеризуют:
Отрезок 4 – электромеханические эффекты;
Отрезок 5 – электротермические;
Отрезок 6 – термоупругие.
Связи между вершинами внутреннего треугольника соответствуют следующим эффектам:
Электрическая поляризация может привести к деформации кристалла путем электрострикции (связь 15) или изменить его температуру из-за выделения теплоты поляризации(связь 13); Линия 14 характеризует теплоту, выделяющуюся при механической деформации.
 |
Рис. 14. Схема взаимной связи равновесных физических свойств кристалла.
Т - механическое напряжение, δ – механическая деформация, t – температура, U – энтропия, 1 – упругость, 2 – диэлектрическая проницаемость, 3 – теплоемкость, 4 – электромеханические эффекты, 5 – электротермические эффекты, 6 – термоупругие эффекты, 7 – прямой пьезоэлектрический эффект, 8 – пьезокалорический эффект, 9 – обратный пьезоэлектрический эффект, 10 – электрокалорический эффект, 11 - тепловое расширение, 12 – пироэлектрический эффект, 13 – теплота поляризации, 14 – теплота деформации, 15 - электрострикция.
Из диаграммы следует, что связи между воздействиями и эффектами могут быть и не прямыми. Так, деформация δ возникает не только непосредственно за счет внешнего механического напряжения, но и за счет вторичных эффектов: напряжение Т создает электрическую поляризацию за счет пьезоэлектрического эффекта (связь 7), а возникшее электрическое поле вызовет деформацию из-за электрострикции (связь 15).
Другим примером служит вторичный (или ”ложный”) пироэлектрический эффект в пьезоэлектрических кристаллах. Его рассмотрим подробнее позднее.
Приведенный пример взаимосвязей свойств кристалла, естественно, не является исчерпывающим. Вообще не все свойства присущи кристаллам одного типа. Они связаны также с составом кристаллического вещества, типом симметрии его решетки и другими факторами. Например, оптические свойства, магнитные свойства формально присущи любому кристаллу, но практически для технических применений используются далеко не все. Не у всех кристаллов выражен пьезоэлектрический эффект. Например, кристаллы с решеткой алмазного типа (т. е. например Ge и Si) им не обладают, но он есть у арсенида галлия (решетка типа цинковой обманки). Но лучше всего это свойство изучено и шире всего используется у кристаллического кварца. Диаграмму, подобную рассмотренной, можно построить, например, для представления взаимосвязи оптических, механических и электрических свойств кристаллов, используемых для электро-акусто-оптической обработки информации.
Рассмотрим более подробно некоторые физические явления в кристаллах.
Пироэлектрический эффект
Из рассмотренного ранее соотношения явление (эффект) = свойство * воздействие следует, что если воздействие скалярно, а эффект – векторный, то и свойство должно быть векторным (тензорным), т. е.
Вектор = вектор * скаляр.
Классическим свойством кристаллов, подчиняющихся этому правилу, является пироэлектрический эффект (на диаграмме эта связь под №12).
Пироэлектричество проявляется в свойстве кристалла диэлектрика изменять величину электрической поляризации при изменении температуры. В результате нагревания или охлаждения пироэлектрического кристалла на его гранях появляются электрические заряды.
Кристаллы пироэлектрических веществ это диэлектрики, обладающие спонтанной (самопроизвольной) электрической поляризацией.
Например, это турмалин, пентаэритрит. К пироэлектрикам относятся также сегнетоэлектрики, это так называемые – “мягкие пироэлектрики“ у которых направление спонтанной поляризации можно изменить внешним полем.
В таких кристаллах можно выделить элементарные ячейки, имеющие некомпенсированный электрический дипольный момент:
p = q· l,
где q – заряд, l – расстояние между равными и противоположными по знаку зарядами.
Если диполи ориентированы одинаково, то кристалл оказывается электрически поляризованным. Спонтанная поляризация определяется как сумма дипольных моментов в единице объема:
 .
.
Численно она равна поверхностной плотности зарядов σ на противоположных гранях кристалла, нормальных к направлению P.
Если кристалл достаточно долго находится при постоянной температуре, то избыточные заряды на его поверхности компенсируются за счет утечек, взаимодействия с ионами воздуха и кристалл практически не обнаруживает внешне электрической поляризации. Если температуру кристалла однородно изменить на ∆t, то анизотропно меняются расстояния и углы между элементарными ячейками, меняется спонтанная поляризация, смещаются заряды диполей и в кристалле появляется постоянная поляризация вдоль направления, называемого электрической осью. То есть в результате изотропного действия температуры (∆t) в кристалле появляется дополнительно электрическая поляризация ∆p, то есть векторное свойство.
Впервые пироэлектрический эффект был обнаружен на кристаллах турмалина. На белой бумаге, на которой лежали кристаллы, пыль собиралась около концов кристалла (поляризация появлялась при колебаниях комнатной температуры). Особенно наглядно это проявляется, если нагретый кристалл турмалина посыпать порошком из смеси серы и сурика, которые при трении поляризуются. Пылинки серы и сурика притягиваются к разным по знаку заряда концам кристалла. Другая известная демонстрация эффекта – если охладить кристалл турмалина в жидком азоте, а затем вынуть на воздух, то на концах кристалла начинает расти “борода” из ледяных кристаллов, образующихся при замерзании частиц влаги, конденсирующихся из воздуха.
Уравнение пироэлектрического эффекта в общем нелинейно
∆P=γ1∆t+ γ2∆t2,
где γ1,γ2- коэффициенты пироэлектрического эффекта (γ1<<γ2). Часто ограничиваются линейным уравнением
∆P=γ∆t,
где ∆t - скаляр, ∆P,γ- векторы.
Пироэлектрические кристаллы используются достаточно давно, но недостаточно широко.
Они очень перспективны для изделий микросистемной техники.
Что на них можно делать?
Датчики температуры с чувствительностью вплоть до 10-9 0C.
Приемники инфракрасного излучения, датчики ударных волн, измерители напряжения, ячейки памяти. Используют их и в преобразователях тепловой (не обязательно солнечной) энергии в электрическую.
Некоторые цифры. Пластинка турмалина, толщиной 1 мм, имеет γ= 1,3*10-5 Кл/м2 *К. Регистрирует изменение температуры 10-5 0C. При нагреве на 10 0C на ней образуется заряд с поверхностно плотностью 5*10-5 Кл*м2, что соответствует разности потенциала между гранями ~1,2кВ. У сегнетоэлектриков пироэлектрический коэффициент на 1-2 порядка больше, чем у турмалина.
Некоторые значения γ при 20 0C.
Турмалин 1,3*10-5
Сульфат лития 3*10-4
Ниобат лития 2*10-3
Танталат лития 1*10-4
Титанат бария (0,5-1)*10-3
Сегнетокерамика 5*10-5
(цирконат-титанат свинца)
Наблюдение и использование пироэлектрического эффекта осложняется и ограничивается эффектами проводимости (утечками).
Кроме того, каждый пироэлектрический кристалл является пьезоэлектриком. Изменение температуры кристалла, особенно неоднородное, вызывает деформацию, а следом идет пьезоэлектрическая поляризация, накладывающаяся на поляризацию, вызванную пироэффектом. То есть имеет место “первичный” (“истинный”) пироэффект и “вторичный” или “ложный” пироэффект.
Если поместить пироэлектрический кристалл в электрическое поле и менять его напряженность, то должен наблюдаться обратный пироэлектрическому электрокалорический эффект(10), то есть изменение температуры пироэлектрика, вызванное изменением приложенного к нему электрического поля. Его предсказали ещё в 19 веке Липман (1880) и Кельвин (1889), а вскоре обнаружили и экспериментально. Но он очень мал: для той же пластинки турмалина в 1 мм толщиной, изменение на 1/300 В дает изменение температуры порядка 10-5 0C. В сегнетодиэлектриках чувствительность значительно выше: так, в кристаллах КН2РО4 температура фазового перехода за счет сильных полей (вблизи точки Кюри) может изменяться примерно на 20C.
Пьезоэлектрический эффект
Пьезоэлектрический эффект состоит в том, что под действием механического напряжения или деформации в кристалле возникает электрическая поляризация (величина и знак которой зависит от приложенного напряжения (7)). Обратный пьезоэлектрический эффект – это механическая деформация кристалла, вызванная приложенным электрическим полем, величина и тип деформации зависит от величины и знака поля (9). При этом электрическое поле может характеризоваться вектором электрической поляризации Р, электрической индукции D или вектором Е, а действующее на кристалл механическое усилие – тензором механического напряжения Тi, j или тензором деформации δi, j. Таким образом тензорное воздействие вызывает векторное явление (или обратно Pi~ Тj, k)
в соответствии со схемой:
Реакция = свойство* воздействие.
Каждая компонента вектора Р связана с каждой компонентой вектора Тi, j соотношением
Pi= di11Т11+di12Т12+di13Т13+di21Т22+di22Т22+di23Т23+di31Т31+di32Т32+di33Т33 ,
или, компактно
Pi= dijkТjk .
Входящие сюда 27 компонентов dijk образуют тензор пьезоэлектрических модулей – тензор третьего ранга.
В силу симметрии dijk=dikj и число независимых компонентов модуля сокращаются до 18.
Всего выделяют четыре типа пьезомодулей:
- коэффициенты, характеризующие поляризацию, вызванную напряжением сжатия и растяжения;
- коэффициенты, характеризующие поляризацию, вызванную напряжениями сдвига. При этом каждая из этих видов поляризации возникает как в продольном (по направлению напряжения), так и в поперечном направлении.
Пьезоэффект возникает не во всех кристаллах, он наблюдается в 11 классах симметрии из 32 известных. Естественно, что количественные показатели пьезоэффекта различны при различных ориентациях пластинки, вырезанной из кристалла.
В случае прямоугольной кристаллографической системе координат, пластинки, перпендикулярно осям X, Y,Z именуются x, y,z – срезами. Множество других находящих применение ориентаций пластин для кристалла кварца представлены на рис. 15.
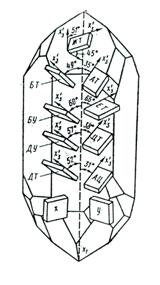
Рис. 15. Некоторые технические срезы кварца
Каждый срез характеризуется своей величиной пьезоэффекта, частотой колебаний и её температурным коэффициентом.
Деформации кристаллов, вызванные пьезоэлектрическим эффектом, очень малы. Например, если к пластинке x – среза кварца приложить напряжение порядка 1 кВ, продольная и поперечная деформация составит порядка 20 Ǻ, а угол между осями x и y изменяется на 0,012", причем это практически не зависит от толщины пластинки.
Однако при резонансе собственной частоты механических колебаний пластинки с частотой возбуждающего электрического поля деформация (то есть амплитуда механических колебаний пластинки) резко увеличивается и составляет мкм.
Собственная частота колебаний пьезоэлектрической пластинки зависит от вещества кристалла, кристаллографической ориентации среза, размеров и формы пластины, и также температуры.
Это свойство используется очень широко для преобразования электрических колебаний в механические и обратно, а также для стабилизации частоты в генераторах.
Важный параметр – температурный коэффициент частоты (ТКЧ):
ТКЧ=Δf/fΔt.
Некоторые срезы кварца имеют практически нулевой ТКЧ и используется для стабилизации частоты.
Пьезоэлектрические кристаллы – эффективные электромеханические преобразователи. Они используются не только в генераторах, но и в двигателях, где электрическая энергия преобразуется в механическую вследствие обратного пьезоэлектрического эффекта.
Важным для таких преобразователей является связь между механической и электрической энергией, соотношение между которыми характеризуется коэффициентом электромеханической связи К:
 ,
,
где Wмех – энергия упругих деформаций колеблющегося пьезоэлектрического кристалла,
Wэл. – электрическая энергия.
Коэффициент К не является тензорной величиной, но зависит от таковых и не одинаков для разных материалов.
Историческая справка
В 1980г. исполнилось 100 лет с тех пор, как братья Кюри обнаружили в кристалле турмалина поверхностный заряд, появляющийся при приложенной к кристаллу механической силы в определенном направлении. Это явление позднее было названо пьезоэлектрическим эффектом. Через год они продемонстрировали обратное явление – наличие механической деформации кристалла под действием электрического поля.
Первое практическое применение этого явления нашло только в 1917г., когда Ланжевен при создании гидролокатора использовал пьезоэлектрические свойства кварца для возбуждения ультразвуковых волн в морской воде. В 1921г. Кэди опубликовал работу о пьезоэлектрических резонаторах, которые позднее стали применятся для стабилизации частоты высокочастотных генераторов.
Это – время использования исключительно объемных колебаний в кристаллах.
В 60-х годах XX века возникла и быстро разрослась новая область применения пьезоэлектрических кристаллов основанная на использовании поверхностно акустических волн (ПАВ). Это, в основном, разнообразные фильтры (частотные, полосовые), линии задержки, позднее – устройства обработки оптических сигналов (модуляторы, дефлекторы).
В последние годы на основе пьезоэффекта созданы устройства МСТ – двигатели, насосы и прочие.
Все пьезоэлектрические устройства основаны на возбуждении упругих механических колебаний и их распространении в твердом теле. Простейшие устройства используют объемные волны, например, кварцевый резонатор (рис.16).
Рис. 16. Простейший кварцевый резонатор
Используется специфические свойства твердого тела:
1) Скорость распространения акустических волн значительно меньше (1 – 10 км/с), чем электромагнитных (и меньше размеры устройств).
2) Затухание невелико.
3) Стабильность частоты механических колебаний очень высока (зависит от направления среза у кварца).
В итоге стабильность кварцевых генераторов ~ 10-6 /°С, при добротности контура порядка 106 . Время задержки до 1 мс (в локации – для индикации движущихся целей, в телевидении задержка на 1 строку ~ 60 мкс).
Возможно также создание ультразвуковых линий задержки как с использованием объемных волн (рис. 17), так и на поверхностных акустических волнах (ПАВ). Использование ПАВ предоставляет больше конструкторских и технологических возможностей.
Рис. 17. Пъезоэлектрическая линия задержки на объемных волнах
Устройства на ПАВ широко используются технологические возможности МЭ.
Главным элементом для использование ПАВ является встречно-штыревой преобразователь (ВШП). Он применяется как для возбуждения и приема ПАВ, но и для формирования частотной характеристики (рис.18).
ВШП состоит из группы идентичных электродов, которые подключены к полюсу генератора. В пьезоэлектрике возникает пространственно периодическое поле. Период преобразователя L должен быть близок (равен) длине поверхностной акустической волны. Это обуславливает и частоту возбуждающих колебаний.
Например: На частоте 100 МГц длина волны в воздухе 3м, в кварце длина акустической волны ~ 32 мкм, отсюда шаг металлизации и зазора в ВШП составляет ~ 8 мкм.
Такой симметричный ВШП возбуждает ПАВ в обоих направлениях. Если нужно однонаправленное излучение, с одной стороны ВШП формируют поглотитель.
Величина апертуры W определяет направленность излучения. Типичная толщина подложки ~ 1 мм. При этом ПАВ отличается тем, что практически 90% энергии распространяется в приповерхностном слое, толщиной порядка длины волны.
Рис.18. Структура встречно-штыревого преобразователя (ВШП)
Пьезоэлектрические материалы
Используемые в промышленности пьезоэлектрические материалы можно разделить на три группы:
1) Пьезоэлектрические кристаллы, обычно монокристаллы с совершенной структурой.
2) Материалы с поликристаллической структурой перовскитов, в которых пьезоэлектрические свойства появляются в результате поляризации (в сильном поле происходит упорядочивание сегнетоэлектрических доменов). Могут быть получены в виде пленок.
3) Пьезоэлектрические полярные полимеры, в которых необходимая анизотропия и формирование пьезоэлектрических свойств происходит при механическом вытягивании материала в присутствии сильного электрического поля.
Кварцевый кристалл – это диоксид кремния SiO2, который может существовать в разных формах, в том числе монокристаллической (исторически - горный хрусталь). На практике используют так называемую α – модификацию кварца (при 573 0С она переходит в β – модификацию, затем при 870 0С образуется α – тридолит, а свыше 1470 0С – α - кристобалит). При 1710 0С кварц плавится.
Материал стоек к воде и многим кислотам, твердость порядка 7 (по Моосу), коэффициент теплового расширения (8-13,4)* 10-6 1/К в зависимости от среза. Хорошо работает как при низких, так и высоких температурах (до 573 0С).
В технике используется как природный, так и синтетический кварц. В природе встречаются кристаллы массой от долей грамма до нескольких тонн (используют в технике обычно кристаллы массой 200-300г). Идеальные кристаллы встречаются редко.
Синтетические кристаллы кварца выращивают гидротермальным методом из водного раствора при высоких давлениях и температурах. Это делается в стальных автоклавах, частично заполненных щелочными растворами (NaCO3 или NaOH). В нижней части автоклава находится сырье кварца, которое растворяется в процессе роста кристаллов, а в верхнюю, более холодную часть, помещают затравки, на которую и высаживается избыточный диоксид кремния из пересыщенного раствора.
Температура внутри автоклава обычно 340-350 0С, давление 100-130МПа, температурный градиент 5-30 Ксм-1 .
Скорость роста очень мала – обычно несколько десятых мм/сутки, поэтому весь процесс длится от нескольких недель до года и более.
Затравка – пластины, толщиной 2-3 мм, иногда используют стержень.
Ниобат и танталат лития (LiNbO3 и LiTaO3). Это сегнетоэлектрики, а танталат лития проявляет также пироэлектрические свойства, оба кристалла используются в качестве электрооптических преобразователях на основе ПАВ. Точка плавления ниобата – 1260 0С, танталата - 1560 0С.
Монокристаллы этих материалов выращиваются из расплавов методом Чохральского. Выращивание идет в присутствии электрического поля.
Берлинит – (AlPO4 – фосфат Al). Имеет такую же структуру, как и кварц, похож на кварц. В природе не встречается; выращивается гидротермальным способом. Кристаллическая структура аналогична кварцу. Работает до 581 0С.
Отличия от кварца – сильнее выражены пьезоэлектрические свойства и большее значение коэффициента электромеханической связи (что важно).
Материалы (в основном, поликристаллические) типа А2В6, А3В5 (ZnS, CdS, ZnO, GAs) удачно сочетают ультразвуковые и полупроводниковые свойства. Наиболее интересный оксид цинка.
Их главная особенность – используются не столько объемные, сколько пленочные структуры, пригодные для возбуждения как объемных, так и поверхностных волн.
Монокристаллические слои ZnO можно вырастить эпитаксиальным способом на ориентирующей подложке из сапфира.
6. Тензорезисторы
Пьезорезистивный эффект и анизотропия пьезорезистивных коэффициентов
Для измерения деформации кристалла под действием каких либо сил (давления, инерции) необходимо установить связь межу изменением электрического сопротивления полупроводника и механическими напряжениями в нем или его деформациями. Рассмотрим феноменологическую картину этой связи на примере тензорезисторов, расположенных на круглой мембране (рис 19).
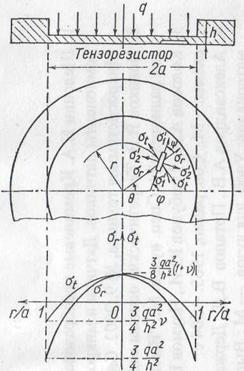
Рис. 19. Распределение механических напряжений в тензорезисторе, расположенном на круглой мембране.
Мембрана радиусом a и толщиной h жестко закреплена по контуру. На нее действует давление q. Тензорезистор расположен на расстоянии r от центра мембраны на обратной стороне по отношению к приложенному избыточному давлению. Для этого случая радиальные напряжение Тr и тангенциальное напряжение Tt в любой точке мембраны можно рассчитать по формулам:
где ν - коэффициент Пуассона.
Напомним, что коэффициент Пуассона представляет собой относительное изменение поперечного размера тела под нагрузкой, деленное на относительное изменение его длины, т. е.
Для кремния <001> – ν = 0,28 ,
<011> – ν = 0,06,
< 010> – ν = 0,28,
поликремния – ν = 0,22.
Если материал мембраны изотропен, то напряжение зависит только от расстояния от центра мембраны r и не зависит от угла θ . Линейная зависимость T(q) наблюдается только при малых прогибах мембран меньших ее толщины h.
Если мембрана имеет анизотропные упругие свойства, то в общем виде её упругие свойства описываются тензором второго ранга, содержащим 9 компонент. Для инженерной практики использование такого сложного описания мало пригодно. Его упрощение возможно за счет использования связей между отдельными компонентами тензора и учета симметрии кристалла. В результате механические напряжения в кремниевой мембране удается выразить через три компоненты тензора механических напряжений, соответствующие продольной, поперечной и сдвиговой составляющей напряжения следующим образом:
 ,
,
![]() ,
,
![]() ,
,
где ψ = φ–θ.
Механические напряжения в кристалле приводят к изменениям в электропроводности. Эту связь можно представить, например, в такой форме:
![]() ,
,
где i, j,k, m,s = 1,2,3; ρ0 – удельное сопротивление материала при механическом напряжении равном нулю; Es - компонента вектора напряженности электрического поля;
ji – компоненты вектора плотности тока, πi, j,k, m - тензор четвертого ранга, характеризующий пьезорезистивные коэффициенты. Таким образом, число независимых переменных чрезвычайно велико. Для кубических кристаллов симметрии, к которому принадлежит кремний, удается получить формулу, характеризующую относительное изменение сопротивления тензорезистора под нагрузкой в следующем виде
∆R/R=π′11Τ′1+π′12Τ′2+π′16Τ′6
и π и Τ зависят от положения резистора.
Т. о. для расчета необходимо знать значение π′11, π′12, π′16 соответственно продольного, поперечного и сдвигового пьезорезисторных коэффициентов. Их величины могут зависеть от ориентации резистора на кристалле и могут быть выражены в приемлемой для расчетов форме в частности:
В плоскости (001)
π′11=π11-(πА/4)(1-cos 4φ) ,
π′12=π12+(πА/4)(1-cos 4φ),
π′16= - (πА/2)sin 4φ.
В плоскости (011)
π′11=π11-(πА/16)(4-4cos 2φ-3cos4φ),
π′12=π12-(3πА/16)(1-cos4φ),
π′16= -(πА/8)(2sin 2φ+3sin4φ).
В плоскости (111)
π′11=π11-πА/2,
π′12=π12-πА/6,
π′16= 0.
Где πА=π11-π12- π44; π12 – не главный, а π11 и π44 - главные пьезорезистивные коэффициенты. Их значения зависят также от легирования кристалла и температуры. В частности для равномерно легированного сравнительно высокоомного кремния значения главных пьезорезистивных коэффициентов приведены в таблице:
Тип проводимости | Уд. сопротивле-ние, Ом см | Конц. прим., м-3 | π11 , 10-11м2/н | π12 , 10-11м2/н | π44 , 10-11м2/н |
n | 11,7 |
| -102,2 | 53,4 | -13,6 |
p | 7,8 |
| 6,6 | -1,1 | 138,1 |
Таким образом, все необходимые исходные данные для расчета зависимости сопротивлений тензорезисторов от давления на мембрану могут быть установлены.
Кроме того в практике проектирования тензорезисторов могут учитывать ряд других факторов, например, нелинейность сопротивления при больших деформациях мембраны. В частности, известно, что резисторы на основе p-кремния линейны в более широком интервале давлений, чем резисторы на кремнии n-типа, в тоже время резисторы, сформированные из донорного полупроводника, имеют более высокую температурную стабильность по сравнению с резисторами на основе акцепторных материалов. Для всестороннего учета множества факторов для полного расчета тензорезистивных датчиков справочных данных, как правило, недостаточно, их проектирование связано с проведением значительного объема исследовательских работ и обычно опирается на экспериментальные результаты. Результаты этой работы обобщаются в виде зависимости
∆R/R=εK или ∆R/R=Mq,
где K - коэффициент тензочувствительности (K=(∆R/R )/(∆l/l)) ,
относительная деформация ε=∆l/l.
Для полупроводников значение К обычно составляет 50–200.
Конструкции тензорезисторов
В тензодатчиках используются все известные конструкции интегральных полупроводниковых резисторов, чаще имеющих простую полосковую структуру, но иногда и в виде меандра. На рис. 20 приведены однополосковые структуры интегральных тензорезисторов.
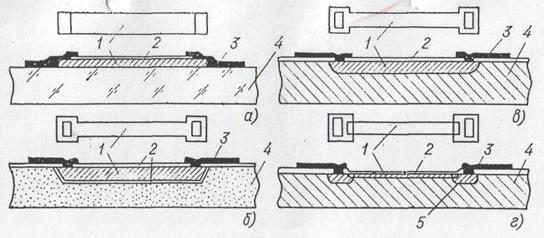
Рис.20. Однополосковые структуры интегральных тензорезисторов:
а — равномерно легированный эпитаксиальный тензорезистор с мезаструктурой; б—равномерно легированный тензорезистор с окисной изоляцией; в—диффузионный тензорезистор; г — ионно-имплантированный тензорезистор; 1 — тензорезистор; 2 — защитное покрытие; 3 — металлизированные токоведущие дорожки; 4 — подложка — упругий элемент преобразователя; 5 — сильнолегированная подконтактная область
Их расположение на диафрагме или балке, находящейся под механической нагрузкой может быть весьма разнообразным, что связано с разными задачами, которые они решают. Во - первых, ориентация резисторов существенно влияет на чувствительность – изменчивость сопротивления от нагрузки сильно зависит от его углового положения. Во - вторых, тензорезисторы обычно используются не поодиночке, а группами, чаще всего в составе мостовых схем. Чувствительность схем уравновешивания, и мостов в частности, можно существенно повысить, если знаки изменения сопротивления в смежных плечах моста противоположны.
Для примера на рис. 21–24 приведены возможные варианты расположения тензорезисторов на диафрагмах, выполненных на кремнии с разной кристаллической ориентацией.

Рис. 21. Расположение однополосковых тензорезисторов р-типа с положительной и отрицательной чувствительностью на мембране (001).
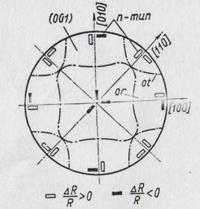
Рис. 22. Расположение однополосковых тензорезисторов n-типа с положительной и отрицательной чувствительностью на мембране (001)

Рис. 23. Расположение однополосковых тензорезнсторов р-типа с положительной и отрицательной чувствительностью на мембране (011)
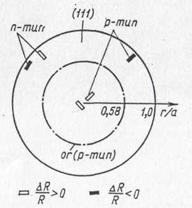
Рис. 24. Расположение однополосковых тензорезисторов р - и п-типов с положительной и отрицательной чувствительностью на мембране (111)
7. Микросистемные датчики давления
Отмечалось, что измерение давления – одна из самых распространенных задач в технике. Мы уже рассматривали как пример элементов МСТ датчики давления на кремниевых мембранах, получаемых анизотропным травлением кремния. Они могут использовать тензорезисторные преобразователи напряжений в электрический сигнал, несущий информацию о давлении или емкостные преобразователи перемещений мембраны.
Наиболее распространенные конструкции чувствительных элементов таких датчиков, использующих мембраны, приведены на рисунке 25.
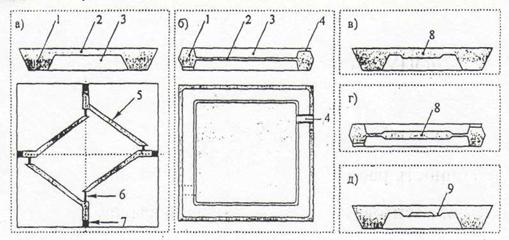
Рис.25. Варианты чувствительных элементов датчиков давления:
а) несимметричная мембрана; б) симметричная мембрана;
в), г) мембраны с жестким центром; д) двойная мембрана с жестким кольцом;
1- корпусная пластина; 2 - мембрана с жёсткой заделкой по контуру;
3 - подмембранная камера; 4 - каналы подвода давлений; 5 - проводящая дорожка; 6- интегральный тензорезистор; 7- контактная площадка; 8 - жесткий центр; 9 - жесткое кольцо.
Вариант а: Несимметричная мембрана (с одной стороны кристалла); обычно на n-кремнии плоскости(100); прямоугольная. На обратной по отношению к подаваемому давлению (газ; жидкость) сформированы диффузионные имплантированные, реже – эпитаксиальные тензорезисторы, чаще – p-типа. Они могут формироваться с одинаковыми или противоположными по знаку законами изменения сопротивления от деформации, обычно включаются по мостовой схеме непосредственно на кристалле.
Если датчик оформляется как самостоятельное устройство, с корпусом чувствительный элемент датчика соединяется посредствам промежуточных
пластин диффузионной сваркой в электрическом поле. В корпусе же могут располагаться операционные усилители и другие элементы.
Точность измерения давления – на уровне 1%, верхний предел измеряемых давлений порядка 250 МПа.
Вариант б: отличается симметричным расположением мембраны. Это удобно при использовании дифференциально-емкостного датчика измерений. В перспективе такой вариант допускает использование противодавления, управляемого через следящую систему, так что датчик будет работать вблизи нуля деформаций, обеспечивая максимум чувствительности, линейности и безопасности при перегрузках.
Варианты в и г используют мембраны с жестким центром. У них повышается концентрация напряжений в перемычке между жестким центром и краем мембраны, что увеличивает линейность и чувствительность датчика. Перемычки очень тонкие. Недостатком этих датчиков является чувствительность их к линейным и угловым ускорениям (ниже мы рассмотрим использование этого явления). Для компенсации этого эффекта на одной пластине делают два одинаковых датчика, причем на второй давление не подано, а используют его как опорный датчик ускорений для компенсации влияния этих в ускорений в первом.
Вариант д использует жесткое кольцо, разделяющее диафрагму на две части - внешнюю (по отношению к кольцу) и внутреннюю. Возможно двоякое использование такой структуры. Первое (основное) - исключение температурных напряжений, возникающих в месте соединения внешней оправы с металлической корпусной деталью.
Тонкая перемычка между массивной частью кристалла и внутренним кольцом гасит температурные напряжения. Рабочей частью мембраны является внутренняя часть, окруженная кольцом; там и располагаются тензорезисторы.
Другой вариант применения такой мембраны – создание двупредельных чувствительных элементов. При этом тензорезисторы располагаются и на внешней и на внутренней мембранах.
Конструктивных вариантов использования подобных чувствительных элементов в собственно датчиках очень много. Чаще всего это гибридные конструкции.
Интерес представляют комбинированные варианты, например, датчика давления и температуры.
Это сделать не очень просто. Например, требования к тензо- и термо - резисторам противоречивы: тензорезистор должен быть термостабилен, а терморезистор - наоборот, должен чувствовать изменение температуры. Поэтому идут другим путем. Например, на чипе, где находится диафрагма датчика давления (иногда прямо на диафрагме) формируют биполярный транзистор, переход эмиттер-база который используется как чувствительный элемент датчика температуры. Такие транзисторы используют иногда для других целей, например, как источник тепла в системах, где организуется термостабилизация датчика давления.
Рассмотрим далее чувствительный датчик давления, использующий технологию поверхностной микрообработки. Возможна также пара таких датчиков, из которых один открыт, а второй защищен от воздействия давления и используется как элемент сравнения (рис. 26).
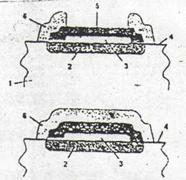
Рис 26 . Структура чувствительного элемента датчика:
I - Si подложка п-типа; 2 - п+электрод; 3 - полость; 4 - диэлектрик; 5 - мембрана; 6 - оксид кремния.
Технология поверхностной микромеханики свободна от многих недостатков объемной микромеханики и позволяет изготавливать подвижные структуры размером до нескольких микрометров. Основой преобразователя является поликремниевая мембрана, сформированная с помощью технологии поверхностной микромеханики (рис. 27).
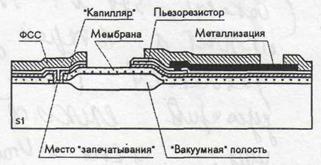
Рис. 27. Конструкция поверхностного микромеханического преобразователя давления
По периметру мембраны нанесены слои диэлектрика, повышающие жесткость крепления мембраны. На противоположных краях мембраны размещены два легированных бором поликремниевых резистора. Пьезорезисторы соединены с двумя поликремниевыми резисторами той же топологии в мост с двумя активными плечами (рис. 28).
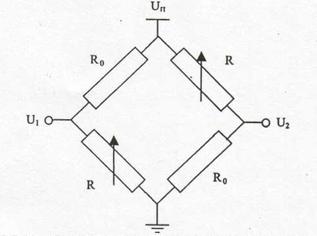
Рис. 28. Схема объединения резисторов преобразователя
Для уменьшения начального разбаланса моста резисторы придвинуты к мембране на минимальное возможное расстояние. Для устранения вклада в разбаланс моста сопротивления металлизации шины, идущие к контактным площадкам, подсоединены к серединам шин, соединяющих пьезорезисторы и резисторы. Выходной сигнал преобразователя определяется соотношением
![]() ,
,
где Ro — сопротивление резистора; R — сопротивление пьезорезистора; Uпит — напряжение питания.
В силу того, что остаточное давление в "вакуумной" полости составляет 10–30Па, преобразователь можно считать преобразователем абсолютного давления.
Технология изготовления преобразователя основана на базе процессов стандартной КМОП-технологии. Изготовление преобразователя начинается с формирования в монокристаллическом кремнии опорного слоя оксида (формирование происходит с помощью термического окисления под давлением с использованием маски из слоя нитрида кремния – LOCOS-процесс). Далее на пластину осаждается слой поликристаллического кремния, из которого формируется мембрана, и в нем с помощью плазмохимического травления вскрывается окно в слое тонкого оксида, служащее каналом ("капилляром") для доступа травителя к жертвенному слою. Жидкостным травлением жертвенный слой удаляется из-под мембраны и, путем осаждения слоя окисла кремния, проводится "запечатывание" мембраны. Затем осуществляются осаждение и легирование поликристаллического кремния, из которого формируются пьезорезисторы. После осаждения слоя нитрида кремния происходят формирование контактных окон к резисторам и металлизация. Далее проводится осаждение защитного слоя фосфоросиликатного стекла и вскрытие мембраны. На рис. 29 приведена микрофотография фрагмента тестового кристалла преобразователей давления.
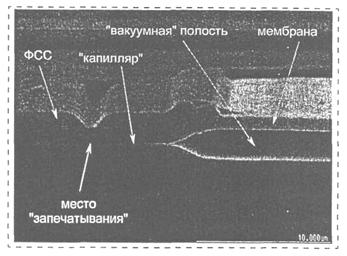
Рис. 29. Фрагмент скола преобразователя
8. Датчики ускорения, вибрации, удара, положения
Отмечалось, что измерение ускорений (акселерометры, гироскопы и пр.) одно из направлений развития МСТ, которое идет очень быстро.
В основе измерений этих параметров лежат фундаментальные законы механики – связь между ускорением, силой и массой. Используют физические явления, позволяющие изучить электрический сигнал, связанный с этими законами.
Чаще всего непосредственно измеряют силу (пьезоэлектрические датчики) или косвенно - по перемещению или деформации чувствительного элемента, причем используют те же емкостные или тензорезистивные преобразователи.
Таким образом, в основе измерений обычно лежат общие принципы, а датчики больше различаются по назначению и условиям использования.
В частности, решают задачи:
1. Измерения ускорений движущихся объектов – самолетов, ракет, наземных или морских средств. Для измерения характерных для них малых ускорений и частот (от 0 до десятков Гц) обычно используют следящие акселерометры и датчики перемещений.
2. Измерения вибрационного ускорения жестких конструкций – до десятков кГц.
3. Измерения ударов – т. е. импульсивных ускорений. Здесь нужны широкополосные датчики.
Принцип действия проще всего проиллюстрировать на примере сейсмического датчика (разумеется, не микросистемного). Он может быть (в зависимости от диапазона частот) датчиком перемещения, скорости или ускорения, которым подвергается корпус прибора (рис. 30).
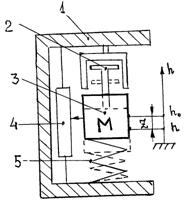
Рис. 30. Схема механической системы с одной степенью свободы:
1 – корпус; 2 – демпфер; 3 – инертная масса; 4 – устройство измерения перемещений; 5 – пружина.
Любой подобный датчик содержит механическую массу М и элемент, связывающий её с корпусом (кристалл пьезоэлектрика, гибкая пластина (пружина) и устройства преобразования параметров движения в электрический сигнал. Получается механическая система с одной степенью свободы.
h0 – ордината точки на корпусе (const),
h – ордината точки b на сейсмической массе.
В отсутствии ускорения ординаты a и b совпадают.
Z=h-h0 – перемещение сейсмической массы при ускорении.
Уравнение равновесия получим из баланса сил:
Cz – сила, возвращающая массу в положении равновесия,
![]() - сила вязкого трения (демпфер),
- сила вязкого трения (демпфер),
![]() - сила ускорения массы М.
- сила ускорения массы М.
Уравнение равновесия:
 .
.
Его решение позволяет определить скорость и ускорение при механическом воздействии на корпус прибора.
Акселерометры
1. Одной из первых и простейших является конструкция интегрального балочного акселератора (рис. 31).
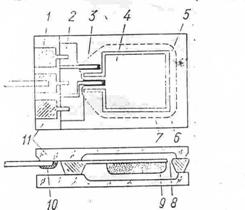
Рис. 31. Конструкция интегрального балочного акселерометра:
1 – контактные площадки; 2 – р+ - область; 3 – р – область; 4 – балка; 5 – воздушный зазор; 6 – кремний; 7 – выемка в крышке; 8 – воздушный зазор; 9 – инерционная масса; 10 – токопроводящий клей; 11 – стеклянная крышка.
Конструкция чувствительного элемента выполнена анизотропным травлением монокристалла кремния в плоскости (100). Часть балки 4 является инерционной массой. Она может быть кремневой или утяжелена осажденным металлом. Балка консолью подвешена в кольцевой прямоугольной рамке основания и отделены от него П-образным зазором 5. В консольной части, которая деформируется при ускорениях, сформированы тензорезистивные датчики деформации. Толщина упругой часть балкимкм. Размеры кристалла 5 × 2.5 × 0.3.
Чувствительность линейного акселерометра с таким чувствительным элементом порядка 10-2 м/с2. Диапазон измерения 0,м/с2; частотный диапазон 0÷100 Гц. Рамка акселерометра защищена сверху и снизу стеклянными крышками.
2. Широко применяется подвес маятника на двух упругих перемычках (торсионах) (рис. 32).
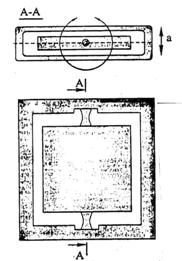
Рис. 32. Гибридный акселерометр компенсационного типа
Так могут выполняться как угловые акселерометры, так и линейные при смещении центра масс маятника относительно оси упругих перемычек. Здесь обычно используются емкостной датчик перемещений маятника, для чего на маятник и корпус прибора нанесены электроды (с зазором до 0.02 мм). При гибридном исполнении такой акселерометр имеет встроенную электронику обратной связи (рис. 33).
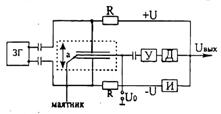
Рис. 33. Схема маятникого компенсационного акселерометра с электростатической обратной связью
Переменное напряжение от задающего генератора ЗГ подается в противофазе на неподвижные электроды датчика. Отклонение маятника модулирует это сигнал. Сигнал отклонения снимается с маятника и поступает через усилитель У на демодулятор Д. Обратная связь подается с выхода на одну обкладку подвеса непосредственно, а на другую – через инвертор И. К маятнику подключено также постоянное смещение V0 электрического подвеса.
Параметры:
Измеряемые ускорения ±35g.
Масштабный коэффициент ~ 1,3 мА/g.
Порог чувствительности ~ 0,5 μg.
Дрейф нуля ~ 10 μg/час.
3. Наконец, возможна подвеска инерционной массы на четырех упругих перемычках (рис. 34) (иногда они попарно располагаются на двух противоположных сторонах пластины, несущей инерционную массу).
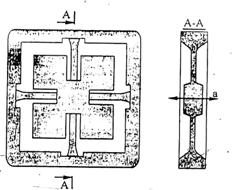
Рис. 34. Схема двухосевого чувствительного элемента
На этой подвеске можно делать более чувствительные и точные приборы с несколько меньшими пределами измерения (до 5÷10g). Полоса – до 1000 Гц, точность – до 1% от максимального диапазона. Преобразовывает – как емкостные, так и жидкостные.
4. На подобном чувствительном элементе делают также микромеханические наклономеры (рис. 35).
Подвижная
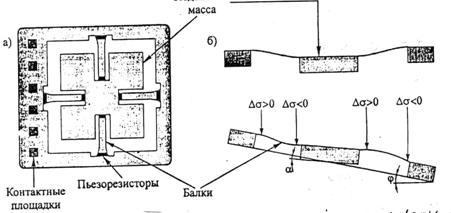
Рис. 35. Микромеханический наклономер
Наклономеры нужны:
- на транспорте - автомобиль, ж/д вагон;
- оптические инструменты;
- датчики уровня;
- для замены ртутных выключателей;
- в медицине (сердечные датчики и др.).
Закрепление инерционной массы производится на тонких балках в пределах промежутков подвижной массы. Балки получаются длинные (без увеличения габаритов чувствительного элемента). Съем информации производится с помощью тензорезисторов. Принцип работы ясен из рисунка: наклон датчика вызывает S-образные искривления балок. Информация об угле наклона балок может быть извлечена из сигналов двух сенсоров, датчики которых расположены в двух взаимно перпендикулярных плоскостях.
Конкретные приборы имеют примерно такие данные:
- подвижная масса – 5×5 мм,
- длина упругой балки – 510 мкм,
- ширина – 7 мкм,
- толщина – 5мкм.
Полный диапазон измеренных углов ± 80º.
Чувствительность ~ 1 мВ/градус наклона.
9. Вибрационные гироскопы
Гироскопы с вращающейся массой (ротором) давно известны. Их главное свойство – сохранять неизменным положение оси вращения в пространстве – широко используется как для стабилизации положения различных платформ, так и косвенно, для получения исходной информации для реализации такой стабилизации. Присущие им недостатки связаны с необходимостью иметь достаточно большую инертную массу и износом опор. Практически их невозможно сделать миниатюрными.
В 1950г. для замены гироскопов с вращающейся массой был предложен вибрационный. Гироскоп предназначен для измерения угловых ускорений. Он сложнее обычных линейных акселерометры, т. к. принципиально требует для работы опорного движения. В обычном гироскопе таким опорным движением является вращение ротора. В вибрационном гироскопе вращение заменено возбуждением опорной вибрации.
Принцип работы чувствительного элемента (ЧЭ) вибрационного гироскопа иллюстрирует рис. 36.
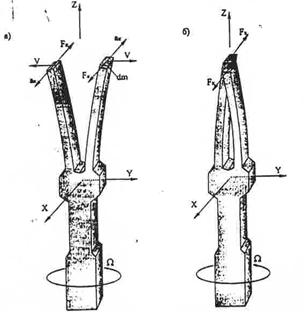
Рис. 36. Принцип работы чувствительного элемента вибрационного гироскопа:
а – возбуждаемые колебания; б – вынужденные колебания.
ЧЭ представляет собой миниатюрный камертон, выполненный из монокристалла. Обе его пластины - ветви приводятся в противофазное колебательное движение в плоскости ZY (плоскость листа). Это возбуждение производится внутренним генератором. Каждый элемент ветви массой dm перемещается с линейной скоростью V. Если теперь основание, на котором закреплен камерон, будет вращаться со скоростью Ω (которую нужно измерить) вокруг оси Z, для каждого элемента массы возникает ускорение Кориолиса ak=2VΩ и соответствующая сила инерции Fk=2VΩdm.
Силы Кориолиса суммируются по каждой из ветвей и приводят к их изгибу в плоскости XZ. При вращении основания в другую сторону изменится и направление изгиба. Таким образом, колебания (отклонения) ветвей в плоскости XZ содержат информацию об угловой скорости вращения основания.
Линейные ускорения, вибрации корпуса прибора являются помехой для полезного сигнала. Теория работы и извлечения полезной информации с таких датчиков достаточно сложна.
Такие простые конструкции ЧЭ выполнялись из кварца, обладающего пьезоэффектом. Датчики имели габариты 63×47×35, а измеряли скорость вращения до 75о /С.
Обычно гироскопы имеют более сложную конструкцию.
На рис. 37 представлена структура вибрационного гироскопа, выполненного по планарной технологии на кремниевой пластине.
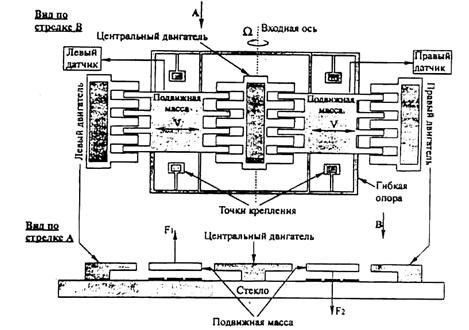
Рис. 37. Конструктивная схема вибрационного гироскопа
Гироскоп имеет две подвижные массы, каждая площадью 4мм2, подвешенные на гибких опорах (рамках) относительно базового элемента (основания), выполненного из стекла. Массы с помощью трех (левый, центральный, правый) электростатических двигателей гребенчатой структуры приводятся в вибрационное движение со скоростью V параллельно плоскости базы. Векторы скоростей находятся в противофазе друг к другу. Если возникает угловая скорость Ω вокруг входной оси, появляется сила Кориолиса F1 и F2, под их действием одна масса будет подниматься, другая опускаться по отношению к плоскости вибрации.
Емкости датчика перемещения, расположенные на подвижных массах (снизу) и на основании зафиксирует перемещение и сформирует выходной сигнал гироскопа. Имеются также емкости для формирования контура электростатической обратной связи.
Наиболее распространена конструкция гироскопа с двумя рамками и торсионным подвесом (рис. 38).
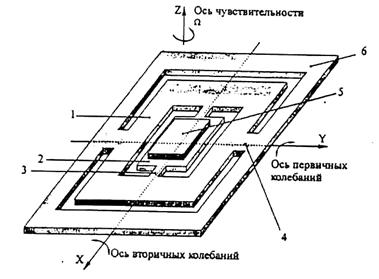
Рис. 38. Структура гироскопа с двумя рамками и торсионным подвесом
Рамки образуют два плоских подвижных элемента – внешний (1) и внутренний (2), соединенных между собой и с основанием с помощью торсионов 3 и 4, оси которых перпендикулярны друг другу. Для увеличения кинетического момента на внутреннем элементе расположена дополнительная масса 5, снизу между основанием и рамками нанесено несколько пар электродов, образующих возбуждающие емкости и емкостные датчики перемещений.
Наружному элементу 1 электрическим возбуждением сообщаются угловые колебания относительно оси Y. Эти колебания в той же плоскости через торсионы 3 передаются и на внутренний элемент. При вращении прибора со скоростью Ω относительно оси Z возникают силы Кориолиса, которые заставляют внутренний элемент поворачиваться относительно оси X. Это отклонение измеряется емкостным датчиком перемещений и несет информацию об угловой скорости Ω.
Такие гироскопы обеспечивают по оценкам, точности порядка (102÷103)о/час и выше.
На рис. 39 приведена конструктивная схема микрогироскопа, имеющего сразу две оси чувствительности.
Чувствительная масса здесь имеет форму кольца (2), имеет сложный симметричный упругий подвес (элементы 3-8). Подвижная часть гироскопа через втулку (1) закрепляется на корпусе прибора (крепление «центральное»). Очевидно, что такой гироскоп сложен и конструктивно и в изготовлении.
Кольцо возбуждается по схеме «вибрационное вращение» с помощью электростатического привода гребенчатой структуры (11). Измеряется вращение относительно оси Z. Измерение перемещений чувствительного элемента осуществляется в двух плоскостях с помощью емкостных датчиков (9) и (10), расположенных на осях X и Y.
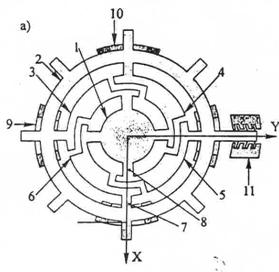
Рис. 39. Двухосевой микрогироскоп:
1 – центральная втулка; 2 – кольцо (инертная масса); 3-8 – элементы упругого подвеса; 9,10 – емкостные датчики перемещения; 11 – привод гребенчатой структуры.
Становится популярной схема очень простого по конструкции стержневого гироскопа (рис. 40).
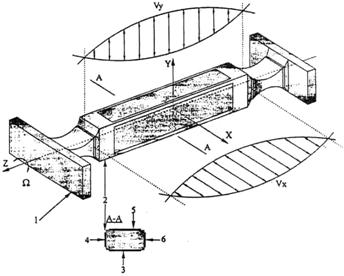
Рис. 40. Структура стержневого вибрационного гироскопа
Правда, его можно выполнить только с использованием пьезоэлектрических материалов.
Он состоит из стержня (2), вытравленного в корпусе (1) и пьезоэлементов (3,4,5,6), нанесенных на грани стержня (стержень может иметь в сечении и треугольное сечение – так делают японцы). С обеих сторон и длине стержень имеет шейки, на которых он и подвешен к корпусу. Пьезоэлементы (3-5) возбуждают в стержне колебания в плоскости YZ, каждый элемент стержня при этом получает скорость Vy. Если теперь вращать стержень вокруг оси Z со скоростью Ω, возникающие силы Кориолиса вызывают колебания стержня в плоскости XZ с линейными скоростями Vx каждого элемента. Для измерения этих колебаний служат пары пьезоэлементов (4-6).
О применении микроакселерометров и гироскопов
Достоинства микроакселерометров и гироскопов (МА и МГ) в части весогабаритных параметров и стоимости – вне конкуренции. Но точность хуже, чем в традиционных решениях. Отсюда и области применения.
На рис. 41 приведён допустимый «уход» (нестабильность) гироскопов разных назначений с одной стороны и условия применения по перегрузкам – с другой.
 |
Рис. 41. Области применения МА и МГ:
КА – космическая аппаратура; ИНК – инклинометры (измерение угловых отклонений по вертикали и азимуту); Авиа, Авто; УРС – управляемые реактивные снаряды; АУС – управляемые артиллерийские снаряды.
По точности МА и МГ лежат в верхней части этого графика (1-10 о/час). Отсюда ясно возможное использование.
Но возможно применение и в авиа-автотехнике, обычно в комбинации, например с GPS (Global Position System), для исключения кратковременных перерывов работы GPS или для кратковременных измерений (кресло космонавта – ускорение).
10. Субмикронные магнитные сенсоры
Общая задача, решаемая магнитным сенсором (МС) – зафиксировать магнитное поле и его изменение. Для решения этой задачи можно применить множество физических явлений, использующих эффекты влияния магнитного поля на какой либо процесс, например, эффект Холла. Существует обширная физическая и техническая литература по этим вопросам, существуют выпускаемые массово промышленностью приборы, предназначенные для устройств измерения параметров магнитного поля (магниторезисторы, магнитодиоды, магнитотранзисторы и пр.).
Остановимся только на одном вопросе, важном для устройств вычислительной техники в первую очередь – магнитные сенсоры в накопителях на жестких магнитных дисках (НЖМД), где достигаются предельные по габаритам и чувствительности параметры МС.
Исторически МС пришли в вычислительную технику из магнитофона. Там использовались «магнитные головки» при записи и воспроизведении информации на магнитной ленте или проволоке. Такой сенсор представлял собой трансформатор с малым магнитным зазором, поперек которого (или через который) проходила магнитная лента, содержащая слой ферромагнетика, который мог перемагничиваться под действием поля в зазоре (при записи) или индуцировать в сердечнике и обмотке головки сигнал, записанный на ленте, при воспроизведении записанной информации.
Существенные изменения в считывании информации (речь идет о сенсорах) произошли с появлением персональных компьютеров.
Стремление к уменьшению размеров головки для повышения плотности записи (уменьшению размера информационного «пятна» на носителе – магнитном диске), приводит к неприятностям при воспроизведении. Дело в том, что домены в материале головки хаотически движутся (колеблются). В большой по массе головке эти колебания усредняются, а в малой приводят к флюктуационному шуму, ограничивающему чувствительность головки и плотность записи.
Поэтому в состав современных НЖМД входят три главных элемента: диск и две головки – записывающая и считывающая. С записью проблем нет: можно компенсировать малые размеры увеличением мощности (тока) записи. Здесь шум «задавлен». Современная плотность записи в 150 Мбит/см2 – не предел, ее можно увеличить еще по крайней мере на порядок. Но важно уметь быстро считывать слабый сигнал (слабый, потому что информационное пятно становится все меньше и меньше).
Важнейшим моментом, который позволяет решить эту задачу явился отказ от считывающей магнитной головки и переход к головкам с «магнитным сопротивлением» (МС).
Магнитным сопротивлением (МС) называют изменение удельного электрического сопротивления вещества под воздействием магнитного поля, это явление (в металлах) обнаружил британский физик У. Томсон (Лорд Кельвин) еще в 1857г., и оно (в металлах) практически ничтожно мало. В полупроводниках эффект заметно больше, а в последние годы обнаружены и организованны структуры, где он чрезвычайно велик.
Механизм обычного магнитного сопротивления достаточно прост. Рассмотрим его в полупроводнике. Дрейфовый ток в полупроводнике заставляет хаотично двигающиеся носители заряда упорядоченно смещаться под действием сил внешнего поля. Если поперечно к линиям тока направить магнитное поле, возникнут силы Лоренца, которые искривят траекторию движения носителей (отсюда – эффект Холла и даже – в сильных полях – вихревое движение носителей).
Гигантское магнитное сопротивление (ГМС)
В 1988г. П. Грюнберг и А. Фертом открыли эффект, названный гигантским магнитным сопротивлением (ГМС). За это открытие им в 2007 году им присудили Нобелевскую премию. Они предложили структуру, содержащую два слоя ферромагнитного материала (кобальт или железо), разделенных слоем немагнитного металла. Направление намагниченности одного ферромагнитного слоя поддерживается неизменным, а второго изменяется под действием внешнего магнитного поля (которое считывается). Когда направления намагниченности ферромагнитных слоев совпадают, ток в немагнитной пленке максимален, а когда они противоположны – минимален.
Эффект ГМС основан на сложном квантовом взаимодействии электронов проводимости, движущихся через кристаллическую решетку материала в магнитном поле. Его суть можно понять, рассматривая упрощенную модель (рис. 42).
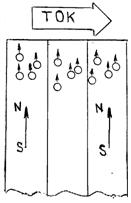
Рис. 42. Схема движения электронов в структуре с ГМС
Структура содержит два слоя железа, разделенные слоем немагнитного хрома. Слои имеют нанометровую толщину. Поток электронов движется через структуру в поперечном направлении (слева направо). Известно, что электрическое сопротивление возникает в основном из-за рассеивания носителей заряда на атомах кристаллической решетки. Движение электронов в магнитных материалах имеет свои особенности. Электроны со спином, ориентированном вдоль направления намагниченности, рассеиваются слабее, чем электроны, имеющие другую ориентацию спинов. При прохождении левого слоя, имеющего значительную постоянную намагниченность, основная часть электронов поляризуется, т. е. их спины ориентируются в соответствии с направлением магнитного слоя. Далее они попадают в слой хрома, где внешнее поле практически отсутствует, и за счет температурных колебаний должна происходить деполяризация спинов. Чтобы этого не случилось, время прохождения электронов в центральном слое должно быть настолько малым, чтобы спин электронов за счет их энерции не успевал изменить свое положение. Поэтому, центральная пленка должна быть нанометровой толщины. Условия дальнейшего движения электронов зависят от магнитного состояния правого слоя (рис. 42). Если его намагниченность направлена, согласно с поляризацией спинов электронов, их движение будет происходить с малым рассеиванием и сопротивлением. Если намагниченность правой пленки отсутствует (или даже противоположна поляризации электронов) сопротивление потоку электронов будет большим. Намагниченность правой пленки определяется тем, в каком магнитном состоянии в данный момент находится информационное пятно на поверхности дорожки НЖМД, которое должно предельно близко (с магнитным зазором) пробегать мимо описанной структуры, расположенной на считывающей головке накопителя. Изменение сопротивления в структуре, несмотря на громкий эпитет (гигантское), не превышает 10%, что вполне достаточно для нормальной работы считывающего устройства.
Таким образом, сопротивление (и ток) через структуру определяется информацией, записанной в магнитной форме на поверхности НЖМД.
Устройства, использующие ГМС, являются одним из примеров массового применения современных технологий. Во-первых, в таких структурах успешно используются спиновые свойства электронов (спинтроника). Известные структуры спиновых транзисторов способны работать только при криогенных температурах в связи с необходимостью сохранения неизменной поляризации спинов. Головки считывания, использующие ГМС, имеют удовлетворительные параметры при нормальной температуре. Во-вторых, эффект можно применять только при наноразмерной толщине центрального слоя (нанотехнология), иначе, за счет тепловых флюктуаций, электроны потеряют согласованную ориентацию спинов, и эффект исчезнет.
Некоторые цифры по ГМС:
МС = 10%, плотность записи 125 Гбит/дюйм2,
сигнал/шум = 29; постоянная времени 0,1 нс,
минимальные магнитное поле 0,005 Тесла.
Исследования МС различных структур продолжались и продолжаются в направлении увеличения собственно МС, повышении быстродействия, снижении уровня шума и пр. Так, М. Жульер исследовал структуры, внешне похожие на рассмотренные, в которых центральная пленка заменена слоем диэлектрика настолько тонкого, что через него могут туннелировать электроны (так называемый туннельный магниторезистивный эффект). Для таких структур МС примерно вдвое больше, меньше уровень шума и необходимое магнитное поле. По рекламным сообщениям основанная на этом эффекте энергонезависимая магнитная память с произвольным доступом (MRAM) уже появилась на рынке.
Есть сообщения об еще более многообещающем ЭМС – экстраординарном магнитном сопротивлении (открыто в 1998г., автор С. Солин и др). Главное отличие – отсутствие магнитных слоев, отсюда ряд достоинств.
Принцип работы прост до примитивности.
Берется тонкий слой полупроводника, например, InSb (желательно с высокой подвижностью носителей) в форме полоски с контактами на краях. В пленку внедряют металлические диски, например, золота малых размеров. Проводимость золота примерно в 2000 раз выше, чем у полупроводника. Поэтому при подаче напряжения металлический диск искажает поле и форму силовых линий тока таким образом, что ток концентрируется в дисках, где его плотность выше (рис.43). Сопротивление системы достаточно мало за счет дисков, которые «шунтируют» полупроводник.
 |
дд
 |
Рис. 43. Распределение тока в пленке с проводящими дисками
При воздействии поперечного магнитного поля картина меняется (рис. 44). Носители заряда (электроны и дырки) вытесняются на края полоски и ток протекает, минуя проводящие диски. Сопротивление резко возрастает, ток падает. Реальные размеры дисков порядка сотен нанометров.
 |
![]()
![]() I
I
![]()
![]()
![]() В
В

![]()

![]()
![]()

![]()

![]()
![]() I
I
Рис. 44. Распределение носителей заряда и тока в пленке с проводящими дисками при наличии магнитного поля
Ожидаемые цифры:
МС>35% (при 300К); плотность записи >300 Гбит/дюйм2,
сигнал/шум 43; постоянная времени < 0,001 нс;
минимальное поле 0,05 Т.
Достоинства: быстродействие повышается примерно в 100 раз, совместимость с микроэлектронной интегральной технологией.
Недостатки: структуры не работают при повышенных температурах (выше комнатной), нелинейность динамических характеристик (сигнал пропорционален квадрату магнитного поля); коммерческого товара пока нет.
Есть и еще более эффективные, но пока не подтвержденные идеи, например баллистическое МС (БМСг. Плотность записи > 1000 Гбит/дюйм2.
11. Микросенсоры расхода (газа, жидкости)
Расходуемый газ (жидкость) перемещается по трубе. Для оценки количества проходящего газа микросистемными средствами не пригодны турбины, поршни и прочие устройства, используемые при больших расходах. Чаще всего в МСТ для определения расхода используется измерение отклонения температуры датчика, содержащего нагревательный элемент, которая происходит за счет изменения интенсивности охлаждения при изменении скорости газового потока. Другой прием - измерение перепада давления на некотором участке (базе) в трубе. На рис. 45 показано поперечное сечение микросенсора расхода, находящегося в трубке диаметром 4 мм.
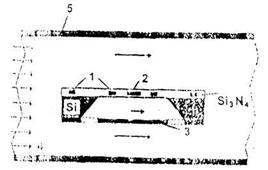
Рис. 45. Поперечное сечение микросенсора с каналом газового потока:
1 - резисторы; 2 - обогреватель; 3 - радиатор и элемент канала газового
потока; 4- газовый поток на входе в трубку; 5 - стенка трубки
В сенсоре находится нагреваи две пары терморезисторов (1), расположенных слева и справа от нагревателя и включенных в схему моста. Левый резистор охлаждается холодным набегающим на нагреватель датчика потоком, а правый нагревается потоком, подогретым при прохождении над нагревателем. В итоге сигнал, снимаемый с моста пропорционален разности температур левого и правого резисторов, которая зависит от интенсивности охлаждения, т. е. от скорости потока. Радиатор (3) обеспечивает оптимальное распределение температуры вдоль мембраны с резисторами и формирует канал газового потока внутри сенсора.
Некоторые технические сведения:
Датчик изготовлен на подложке из монокристаллического кремния. Рабочая часть (мембрана) имеет размеры 2·1,5мм. Питание моста 3В, потребляемая мощность до 8МВт. Перегрев нагревателя 55°С. Чувствительность соответствует выходному напряжению 0,7В при скорости потока 2,7м/с.
Другой вариант подобного датчика, работающего по аналогичному принципу, приведен на рис. 46.
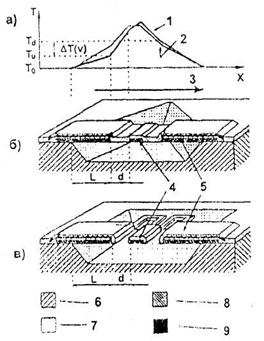
Рис. 46. Чувствительные элементы КМОП датчиков расхода газового потока:
а) графики распределения температуры вдоль продольной оси чувствительных элементов: 1 - при наличии газового потока; 2 - без газового потока.
б) упрощенное изображение чувствительных элементов КМОП датчиков с мостовой микроструктурой: 3 - направление газового потока; 4 - нагреватель; 5 – термобатарея.
в) с воздушным зазором: 6 - кремний; 7 - диэлектрические слои; 8 - поликремний; 9 – металл.
Отличие здесь в том, что для измерения перепада температур (слева и справа от нагревателя) используют термопары, использующие контакт поликремния и алюминия (5).
На рис. 46а представлено распределение температуры вдоль датчика без газового потока (2) и при его наличии (1): распределение смещается вправо и возникает разность температур на “горячих” слоях термопар (в точках d и u), которая вызывает разные термоЭДС. Эти разности пропорциональны расходу газа:
∆U=Ud-Uu=kN(Td-Tu)
Разница вариантов б и в – чисто конструктивная: во втором отсутствует диэлектрический мостик между нагревателем и горячими слоями термопары (термоизоляция - воздушная). Во втором случае (в) чувствительность получилась вдвое выше, чем в первом (б).
Один из вариантов подачи газа к такому датчику представлены на рис. 47.
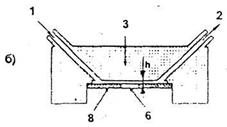
Рис. 47. Поперечное сечение устройства для корпусирования чувствительных элементов датчиков расхода газа:
1 - ввод газа; 2 - вывод газа; 3 - акриловый пластиковый блок с каналом потока; 4 - плата основания.
Вариант измерений расхода с использованием датчика давления (измерение перепада давления на некоторой базе L вдоль трубы) достаточно очевиден и обычно используется при больших расходах (рис. 48).
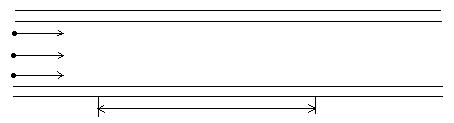
N
Р2 Р1
L
Рис. 48. Измерение расхода газа по перепаду давления
N = K(p2-p1).
12. МИКРОНАСОСЫ
Одним из объектов МСТ являются микронасосы, т. е. устройства, предназначенные для перекачки малых объектов жидкости или газов. Они находили и находят все большее применение в системах химического анализа (медицина, мониторинг окружающей среды), принтерах, использующих капельный метод подачи чернил и пр. Такие микронасосы используют разные принципы функционирования. Их можно условно разделить на три группы: клапанные, бесклапанные, и не содержащие движущихся элементов конструкции (электродинамические и электрокапиллярные).
Клапанные микронасосы
По принципу действия они близки к обычным поршневым насосам: в рабочей камере создается последовательно давление или разрежение (так как это происходит в цилиндре под перемещающимся вверх-вниз поршнем) а система клапанов управляет направлением движения жидкости или газа. Надо только в микроскопическом объеме, пригодном для группового производства, решить традиционные задачи: создать периодически нарастающее и убывающее давление и организовать клапанами нужное движение.
Пьезоэлектрический возбудитель
В качестве источников давления в рабочих камерах микронасосов обычно используют пьезоэлектрические возбудители – тонкие диски (полоски) из пьезоэлектрика с парой напыленных электродов, наклеенных на тонкую диафрагму. Напомним, что эффект проявляется в изменении размеров пьезоэлемента при подаче электрического поля.
Если диск из пьезоматериала наклеить на тонкую диафрагму, то при подачи на электроды напряжения изменяющийся диаметр диска приведет к искривлению диафрагмы, как это показано на рис. 49. Это движение можно использовать для изменения объема рабочей камеры насоса (рис. 50).
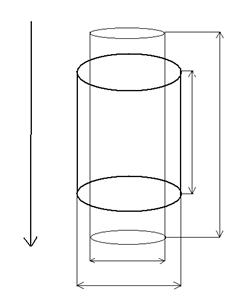
E
L L+∆L
A+∆A
A
Рис. 49. Изменение размеров пьезоэлемента в электрическом поле
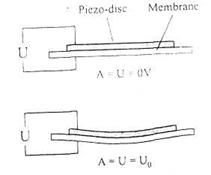
Рис. 50. Управление формой диафрагмы с помощью пьезоэлемента
“Перистальтический” микронасос
На рис. 51 представлен микронасос, содержащий три последовательно соединенные камеры с управляющими пьезоэлектрическими дисками. Движение жидкости соответствует “перистальтике” кишечника. Последовательность срабатывания рабочих мембран ясна из рисунка. Мембрана, создающая рабочее давление (расширение) в камере одновременно открывает и закрывает клапаны (в двух левых камерах они открыты, в третьей, правой - закрыты).
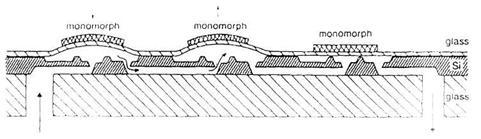
Рис. 51. Трехтактный микронасос
Двухклапанный поршневой насос
Усложнение конструкции клапана, а именно, закрепление его на подвижной диафрагме, позволяет существенно упростить конструкцию насоса: уменьшить число камер и возбуждающих дисков – вариантов много. На рис. 52 представлен двухклапанный насос с одним возбуждающим диском. Принцип работы ясен из рисунка.
|
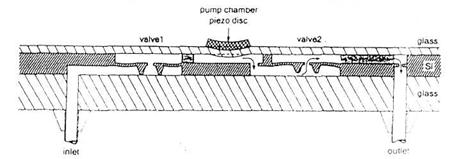
Рис. 52. Двухклапанный микронасос
Термопневматический микронасос
На рис. 53 показан двухклапанный насос с термическим возбудителем вместо пьезоэлектрического. Для этого в нем сформирован электронагреватель (резистор) и герметичная камера, заполненная воздухом (в центре). Давление в камере определяется температурой нагревателя и управляет рабочей мембраной насоса, создающей давление в камере собственно насоса. Естественно, что производительность такого насоса невелика (рабочая частота ограничена тепловой инерцией нагревателя и пневмокамеры).
|
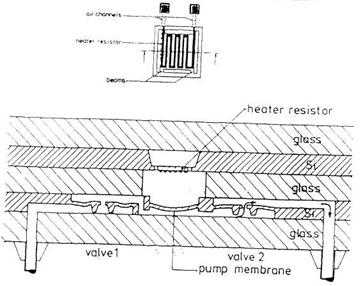
Рис. 53. Термопневматический микронасос
Бесклапанные микронасосы
Наиболее сложным в изготовлении и капризным элементом конструкции микронасосов является клапан. Поэтому предпринимались попытки создания бесклапанных микронасосов. В 1989г. была предложена идея использовать в насосах структуры с переменным сечением канала, в которых сопротивление протекающему потоку зависит от направления (рис. 54).
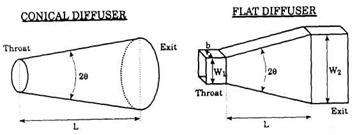
Рис. 54. Структуры диффузоров
В таких структурах (их иногда называют диффузорами) при протекании жидкости или газа скорость потока и давление в нем меняется по координате (у широкого конца давление и скорость меньше). Но главным их свойством является сопротивление протеканию потока слева направо или справа налево.
В 1990г. был предложен прототип такого насоса (рис. 55). Он содержит возбуждающий колебания (и переменное давление в камере) пьезоэлектричекий диск, закрепленный на диафрагме. Входной и выходной диффузоры обеспечивают однонаправленное движение жидкости в циклах сжатия и разряжения в рабочей камере.
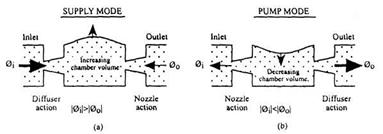
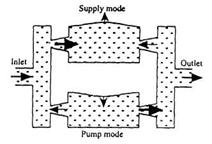 |
Рис. 55. Структуры микронасосов с диффузорами
Вариант реализации конструкции в микроисполнении схематично представлен на рис. 56.
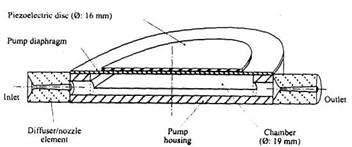
Рис. 56. Прототип микронасоса в микроисполнении
Возможна реализация структуры подобного микронасоса с помощью технологии анизотропного травления кремния (рис. 57).
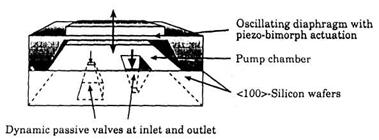
Ри
Рис. 57. Структура микронасоса на основе анизотропного травления кремния
Электрические микронасосы
Для перекачивания электропроводящих дипольных жидкостей могут быть использованы насосы с перемещением жидкости за счет электрических сил (даже электростатических). Известно, что на диполь, находящийся в неоднородном магнитном поле, действует сила, вызывающая его поступательное движение по силовым линиям. Разберемся с этим подробнее. Известно, что напряженность поля E определяется силой, действующей на единичный заряд. Рассмотрим фрагмент неоднородного электрического поля (рис. 58).
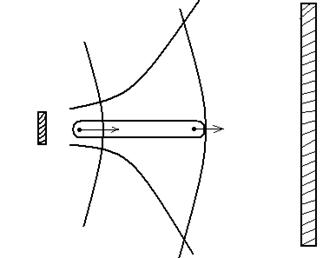 _
_
U2
U1
+ E1 E2
1 2
Рис. 58. Силы, действующие на диполь в неоднородном электрическом поле
В левой его части поле меняется быстрее и Е1>Е2. Силы действующие на пробный заряд в точках 1 и 2 разные. Если в такое поле попадет диполь, то, во-первых, он развернется вдоль силовой линии, так чтобы его положительный заряд был ближе к отрицательному электроду, создающему поле, а отрицательный – ближе к положительному электроду. При этом силы, действующие на положительный и отрицательный заряд диполя, окажутся разными в силу его конечной длины ∆l. Поэтому появится равнодействующая этих сил, пропорциональная (Е2-Е1)q∆l, где q – заряд диполя. Эта сила вызовет движение (дрейф) диполя в направлении вдоль силовых линий поля в сторону, где силовые линии поля “гуще”, т. е. в область, где градиент поля выше (это приводит, например, к широко известному накоплению пыли на кинескопе, поверхность которого находиться под высоким потенциалом). Существует ряд конструкций микронасосов, основанных на использовании этого принципа действия. Приведем одну из них (рис. 59).
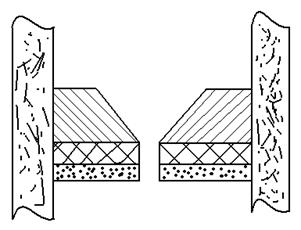
Si
SiO2
Рис. 59. Сечение фрагмента электрического микронасоса
В тонкой кремниевой пластине делается матрица отверстий конфигурации, указанной на рисунке. На стороне пластины, где площадь отверстий меньше (на рисунке - снизу) поверхность кремния оксидирована и на диэлектрик нанесен тонкий слой металла Me. Пара электродов полупроводник – металл образует неоднородное и не симметричное в области отверстия поле. В силу малой величины отверстия и толщины диэлектрика напряженность поля получается высокой даже при небольших рабочих напряжениях.
13. ТЕРМОЭЛЕКТРИЧЕСКИЕ СЕНСОРЫ ТЕМПЕРАТУРЫ
Термоэлектрические сенсоры реализуют прямое преобразование теплоты в электрический сигнал и не нуждаются в источниках питания. Создание подобных сенсоров температуры возможно также на основе использования пироэлектрического эффекта.
В основе термоэлектрического преобразования лежит эффект Зеебека (), открытый в 1821г. Изучая тепловые эффекты в гальванических устройствах, Зеебек соединил попарно концы двух полукруглых дуг (проводников), изготовленных из висмута и меди. При наличии разности температур между спаями стрелка лежащего рядом компаса отклонялась (рис.1). Отклонение наблюдалось и при других парах металлов.
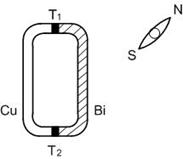
Рис. 1. Опыт Зеебека
Зеебек назвал наблюдаемое явление термомагнетизмом, но не связал отклонение компасной стрелки с протеканием в таком замкнутом контуре электрического тока.
Термоэлектрическую природу эффекта независимо друг от друга поняли годом позже Фурье и Эрстед; они же предложили первые термоэлементы.
Логичное объяснение природа термоэлектрического эффекта нашла после работ У. Томсона в середине XIX века. Если взять металлическую шину и придать ее концам разную температуру, то от нагретого конца к холодному за счет теплопроводности будет передаваться тепловая энергия (законы Фурье были уже известны). У. Томсон установил, что при этом вдоль проводника возникнет электрическое поле, вызванное градиентом температуры*).
_______________________________________________________
*) Другие возникающие при этом эффекты, установленные
У. Томсоном, здесь не рассматриваются.
Процесс этот описывается уравнением:
![]() ,
,
где α – абсолютный коэффициент Зеебека, характерный для данного материала.
Это уравнение является основным уравнением термоэлектрического эффекта, связывающим изменение температуры и потенциала вдоль проводника.
Для однородного проводника справедливо:
dV = α dТ.
Для наглядности рассмотрим проводник с неравномерным распределением температуры вдоль его длины (рис. 2).
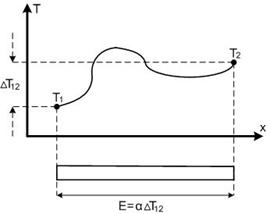
Рис. 2. Эффект Зеебека в неравномерно нагретом проводнике
Градиент температуры в любой точке проводника определяет и градиент потенциала в этой точке
![]() ,
,
а перепад температуры между произвольными точками, в том числе и между концами проводника, приведет к разности потенциалов между ними.
При этом любые вариации температуры внутри интервала между рассматриваемыми точками на разность потенциалов между ними не влияют.
Для измерения ЭДС между концами провода, к ним надо подключить измерительный прибор. При этом возникнет замкнутый контур. Если щупы прибора выполнены из того же материала, что и исследуемый проводник, то никакой термоЭДС или ток зафиксировать не удастся, даже если между концами проводника есть разность температур (рис. 3А).
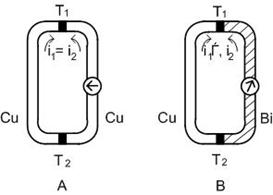
Рис. 3. Термоэлектрический контур с одинаковыми (А)
и различными (В) материалами проводов
В этом случае две ветви контура создают токи равной величины, но противоположных направлений, которые скомпенсируют друг друга.
Для выявления термоЭДС необходим контур из двух разных материалов (рис. 3В), в котором появится ток:
Δi12 = i1 - i2 .
Если контур разомкнуть, то измеряемая разность потенциалов и есть напряжение Зеебека, индуцированное теплом.
Физическое объяснение эффекта достаточно просто. Свободные электроны в металле ведут себя как электронный газ, их кинетическая энергия определяется температурой. В разных металлах количество электронов отличается. При контакте двух металлов происходит диффузия электронов в материал, где исходно их было меньше, и он заряжается отрицательно, а исходно более богатый электронами материал приобретает положительный заряд. В результате процесс диффузии уравновешивается электрическим полем. Если теперь один из контактов нагреть, равновесие нарушается. Таким образом, эффект Зеебека является электрическим по своей природе. Коэффициент Зеебека α присущ данному материалу, равно как и другие его параметры (удельная проводимость, теплопроводность и пр.).
Поскольку для выявления и использования эффекта Зеебека всегда необходимо использовать два разных материала А и В, вводится понятие дифференциального коэффициента Зеебека для термопары αТ
αТ = αАВ = αА – αВ.
Тогда напряжение на соединении будет равно
dVAB = αAB dT или ![]() .
.
В термопаре всегда можно выделить холодный (опорный, эталонный) и горячий спай. Коэффициент Зеебека не зависит от способа реализации спая (сварка, скрутка, спайка) и определяется только природой контактирующих металлов.
Из изложенного ясно, что эффект Зеебека реализует прямое преобразование тепловой энергии в электрическую. Для повышения индуцированного напряжения Джоуль впервые предложил соединять несколько термопар в батарею.
Термопары естественно использовать для измерения температуры. Впервые такое предложение сделал Беккерель в 1826г. Реальные конструкции термопар выполнил Г. Ле-Шателье в 1886г. на основе проводов из платины и сплавов платины с родием; позднее и на основе других материалов.
Функцию напряжения, генерируемого термопарой, от температуры часто аппроксимируют уравнением второго порядка
VAB = α0 + α1T + α2T2 .
Например, для термопары медь (+) – константан (-) уравнение выглядит так:
VAB = VT = -0,0543 + 4,094 ·10-2T + 2,874 ·10-5T2 .
Тогда коэффициент Зеебека этой пары принимает вид
αТ =  = 4,094 ·10-2 + 5,748 ·10-5T
= 4,094 ·10-2 + 5,748 ·10-5T
и является линейной функцией температуры. Иногда его называют чувствительностью термопары.
Термопары относятся к классу относительных датчиков, т. к. напряжение определяется разностью температур спаев. Обычно один спай является опорным (эталонным), его температура поддерживается постоянной и известна, как правило это холодный спай.
В микросистемной технике используют термопары плоской формы и как правило изготовленные одним из способов формирования пленочных слоев. Для повышения чувствительности несколько термопар объединяют в термобатарею (термоэлемент). Проводники термопары могут размещаться в одном или нескольких слоях, разделенных диэлектриком.
На рис. 4 представлен фрагмент конструкции датчика расхода газа, в котором о скорости газового потока судят по перепаду температуры (принцип работы такого расходометра рассмотрен в разделе 5.2).

Рис. 4. Сенсор перепада температуры в газовом потоке
Сенсор перепада температуры здесь содержит две последовательно включенные термопары. Они расположены на основании, выполненном на тонкой консольной балке, сформированной химическим травлением кремниевой подложки датчика. Такая конструкция использована с целью уменьшения влияния температуры подложки на сенсор перепада температуры в газовом потоке и уменьшения тепловой инерции устройства.
В микросистемных устройствах на кремнии естественно использовать этот материал как один из проводников термопары в монокристаллической или поликристаллической форме. Следует отметить, что коэффициент Зеебека в полупроводниках сильно зависит от их легирования. В частности, для монокристаллического кремния n-типа при комнатной температуре коэффициент Зеебека определяется формулой
 ,
,
где ρ0 ≈ 5 ·106 Ом·м и m ≈ 2,5 – константы;
К – постоянная Больцмана; q - заряд электрона.
Значения коэффициента Зеебека для кремния в монокристаллической и поликристаллической форме по отношению к меди при комнатной температуре приведены в таблице 1.
Таблица 1
Коэффициенты термоЭДС Si по отношению к Cu при t0 = 250C
Материал | αАВ, мкв/к |
p – Si | 102 |
p – поли Si | 102 |
n – Si | -102 |
n – поли Si | -10-2 |
При подключении термопары к интерфейсной измерительной схеме следует соблюдать осторожность в выборе материалов. В частности, такой вход измерительной схемы всегда должен использовать идентичные проводники. Поскольку термоЭДС при малых перепадах температуры обычно невелики, необходимо также соблюдать меры по предотвращению помех.
Контрольные вопросы.
1. В чем суть принципиальных отличий активных и пассивных сенсоров температуры?
2. Эффект Зеебека; трактовка его физической природы в исторической ретроспективе.
3. Термопары и термобатареи – возможности их использования для измерения температуры и других целей.
4. Реализация термоэлектрических сенсоров в МСТ: характерные черты конструкций, технологии и применяемых материалов.
2. РЕЗИСТИВНЫЕ СЕНСОРЫ ТЕМПЕРАТУРЫ
Физические свойства материалов и параметры выполненных их них деталей в той или иной степени зависят от температуры и несут таким образом информацию о её величине. Для извлечения этой информации необходимы дополнительные устройства, в связи с чем такие сенсоры и датчики на их основе относятся к числу пассивных.
Зависимость сопротивления металлов от температуры R(T) впервые заметил Х. Дэви в 1821г., а в 1871г. В. Сименс сделал первый резистивный термометр из платиновой проволоки. Сейчас существует большое разнообразие резистивных датчиков температуры. В микросистемной технике используют тот же принцип, т. е. измеряют зависимость сопротивления от температуры, только резисторы берут обычно пленочные или полупроводниковые. Их достоинствами являются высокая чувствительность, простой интерфейс, долговременная стабильность.
Рассмотрим сначала датчики на основе металлических пленок. Зависимость R(T) наблюдается у всех металлов, но не все используют в качестве основы для сенсоров. Известно, что электрические свойства материалов в тонких слоях сильно отличаются от объемных и зависят также от способа изготовления пленки. Поэтому, круг материалов, используемых для изготовления сенсоров, ограничен наиболее изученными и стабильными. Среди металлов это платина (при измерениях температуры до 6000С) и молибден - при измерениях более высоких температур.
Конструкция резистивного сенсора температуры является типичной для пленочных схем (рис. 5). Подложкой является диэлектрик (ситалл, керамика) или кремний, покрытый диэлектрической пленкой окиси SiO2 или нитрида кремния Si3N4. В плане структура может быть линейной (А) или иметь форму меандра для повышения сопротивления за счет увеличения отношения длины к ширине резистора (В).
Величина сопротивления определяется выражением
R = R□ ![]() ,
,
где R□ - сопротивление квадрата пленки, для платины лежит в пределах 100 ![]() 1000 Ом/□ в зависимости от толщины материала.
1000 Ом/□ в зависимости от толщины материала.
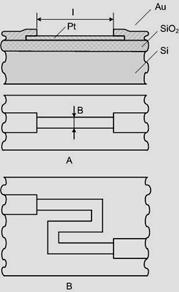
Рис. 5. Структура тонкопленочного терморезистора:
А – линейного; В – типа «меандр»
Функция изменения сопротивления от температуры обычно апроксимируется линейной зависимостью вида
R = R0 [1 + α (t – t0)],
где R0 – значение сопротивления при эталонной (например, комнатной) температуре; α – температурный коэффициент сопротивления (ТКС).
Для расчетов в более широком диапазоне температур иногда используют полиномиальную зависимость второго порядка. Например, для платинового проволочного сенсора справедливы следующие аппромаксимации:
R = R0 (1+36,79 ·10-4 Δt)
или
R = R0 (1+36,79 ·10-4 Δt – 5,8·10-7 Δt2).
Наряду с металлопленочными резисторами в изделиях МСТ могут применяться термисторные сенсоры, т. е. резисторы специально изготовленные из керамических полупроводников с большими значениями ТКС. Если в традиционной электронике термисторы изготавливаются в виде самостоятельных изделий в формах диска, капли, трубки, пластины и т. п., то в МСТ они получаются методами толстопленочной электроники на достаточно термостойкой подложке (например, керамике). Термисторы получают спеканием нескольких оксидов из ряда следующих металлов: никель, марганец, кобальт, титан, железо. При этом можно получить элементы в широком диапазоне сопротивлений от единицы Ом до многих МОм как с положительным, так и с отрицательными ТКС. Поскольку зависимости сопротивлений от температуры существенно нелинейны, их аппроксимируют нелинейными уравнениями. В частности, нередко используют выражение
Rt = Rt0 e -β (1/T – 1/T0 ) ,
где Т0 – калибровочная температура в К; Rt0 – значение сопротивления при температуре калибровки; β – характеристи-ческая температура материала в К.
Обычно β составляет 3000 – 5000 К.
В изделиях МСТ естественно использовать также накопленный в микроэлектронике опыт проектирования и изготовления в качестве датчиков температуры полупроводниковых кремниевых резисторов.
Проводимость полупроводников (и, в частности, кремния) определяется двумя главными факторами: концентрацией носителей заряда и их подвижностью. Оба эти параметра существенно меняются при колебаниях температуры. Рассмотрим качественно суть этих изменений.
В собственном полупроводнике при фиксированной температуре проводимость определяется наличием электронов в зоне проводимости и дырок в валентной зоне. Это количество увеличивается с ростом температуры, что и обуславливает отрицательный ТКС полупроводника. В примесном полупроводнике проводимость в основном определяется концентрацией легирующих примесей и их характером. Избыточную (по отношению к собственной) концентрацию электронов создает донорная примесь, избыток дырок обеспечивают акцепторы. В широком диапазоне температур все примесные атомы активированы. Концентрация примесных носителей зарядов практически постоянна и преобладает над собственной. Практический температурный предел работоспособности полупроводниковых приборов чаще всего определяется тем фактом, что нарастающая с ростом температуры генерация собственных носителей заряда вначале сравнивает их концентрацию с концентрацией примесных, а затем становится преобладающей. Для кремния эта область “конкуренции” примесной и собственной концентраций лежит в районе 200 0С.
Не менее сложной является картина влияния подвижности на температурную зависимость проводимости полупроводника. Она определяется характером рассеяния носителей заряда. В области очень низких температур (обычно за пределами традиционного температурного диапазона работы аппаратуры) подвижность носителей определяется механизмом их рассеяния на ионизированных примесях. При этом подвижность пропорциональна Т3/2, т. е. нарастает с повышением температуры. При более высоких температурах (в том числе и обычных “рабочих” температурах устройств) начинает преобладать рассеяние носителей на тепловых колебаниях решетки (фононное рассеяние) и зависимость подвижности от температуры пропорциональна Т -3/2.
Таким образом, при различных выборах материалов и в разных температурных диапазонах температурный коэффициент сопротивления кремния может быть как положительным, так и отрицательным. Для грубой ориентировки можно считать, что при температурах ниже 200 0С температурный коэффициент кремниевых резисторов будет иметь положительное значение, а при t > 200 0С – отрицательное.
В диапазоне температур –50 +150 0С типичная чувствительность кремниевого резистивного сенсора составляет 0,7% / 0С, а его параметры можно аппроксимировать полиномом второго порядка
RT = R0 (1+AΔt + BΔt2),
где R0 – значение сопротивления резистора в эталонной точке, Δt – значения отклонений температуры от нее.
О порядке величин коэффициентов А и В можно судить по их значениям в типичном датчике температуры KTY-81:
А = 7,87 ·10-3 К-1 , В = 1,874 ·10-5 К-2
в диапазоне температур -55 +150 0С.
Использование резистивных сенсоров в датчиках температуры имеет характерную особенность. Поскольку такой сенсор не вырабатывает информационный сигнал самостоятельно, для измерения его сопротивления приходится пропускать ток от измерительного устройства. Этот ток вызывает саморазогрев резистивного сенсора, что увеличивает погрешность измерений. Отсюда следует, что необходимо использовать измерительные схемы, требующие минимальных значений протекающего через сенсор тока, в частности, эти схемы обычно используют очень низкие значения напряжений питания.
Наиболее часто для измерений сопротивления в резистивных сенсорах используют потенциометрические и мостовые схемы.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 |
