
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
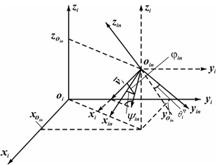
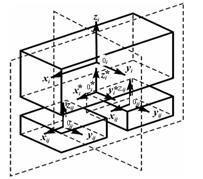
- поточной системы координат относительно неподвижной (рисунок 8) - линейными координатами  (определяющими пространственное положение точки оси пути) и угловыми: углом наклона оси пути
(определяющими пространственное положение точки оси пути) и угловыми: углом наклона оси пути ![]() - между осью
- между осью ![]() и плоскостью
и плоскостью ![]() , углом ее отклонения
, углом ее отклонения ![]() между проекцией
между проекцией ![]() на плоскость
на плоскость ![]() и осью
и осью ![]() , углом боковой подуклонки
, углом боковой подуклонки ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() - в совокупности с линейными координатами, определяющими пространственное положение элемента поверхности пути;
- в совокупности с линейными координатами, определяющими пространственное положение элемента поверхности пути;
|
|
Рисунок 7 – Пространственное взаиморасположение связанной и поточной систем координат | Рисунок 8 – Пространственное взаиморасположение поточной и неподвижной систем координат |
- каждой из связанных систем координат относительно неподвижной (рисунок 9) - линейными координатами ![]() (определяющими пространственное положение центра масс п-го тела расчетной схемы экипажа) и угловыми: углом тангажа
(определяющими пространственное положение центра масс п-го тела расчетной схемы экипажа) и угловыми: углом тангажа ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() ; углом курса
; углом курса ![]() между проекцией оси
между проекцией оси  на плоскость
на плоскость ![]() и осью
и осью ![]() , углом крена
, углом крена ![]() между осью
между осью ![]() и плоскостью
и плоскостью ![]() (определяющими пространственное положение главных центральных осей инерции соответствующего тела).
(определяющими пространственное положение главных центральных осей инерции соответствующего тела).
На основании описанной системы линейных и угловых координат принимаются следующие опорные координаты экипажа (под опорными понимаются координаты, полностью определяющие пространственное положение опорных тел системы):
![]() перемещения вдоль оси пути, центров масс обрес-соренных (
перемещения вдоль оси пути, центров масс обрес-соренных (![]() опускается) и необрессоренных (передней при
опускается) и необрессоренных (передней при ![]() и задней при
и задней при ![]() тележек) частей экипажа;
тележек) частей экипажа;
![]() боковые относы и подпрыгивания тех же частей;
боковые относы и подпрыгивания тех же частей;
![]() углы поворотов частей вокруг продольно-горизонтальных, поперечно-горизонтальных и поперечно-вертикальных их главных центральных осей инерции;
углы поворотов частей вокруг продольно-горизонтальных, поперечно-горизонтальных и поперечно-вертикальных их главных центральных осей инерции;
![]() углы поворотов колесных пар экипажа вокруг их осей вращения.
углы поворотов колесных пар экипажа вокруг их осей вращения.
В принятой системе опорных координат уравнения связей наложенных на агрегат тел, имитирующих экипаж вытекающие из допущений, принятых при выборе его расчетной схемы, могут быть записаны в виде
 (1)
(1)
где ![]() средний радиус катания (без проскальзывании) колесных пар экипажа.
средний радиус катания (без проскальзывании) колесных пар экипажа.
Итак, на систему трех опорных тел (пространственное положение каждого из которых, естественно, определяется шестью координатами) с присоединенными к двум из них четырьмя колесными парами (имеющими возможность лишь вращаться вокруг своих осей и не имеющими никаких иных степеней свободы относительно тел ![]() , в состав которых они включены) наложено 12 связей, определяемых соотношениями (1).
, в состав которых они включены) наложено 12 связей, определяемых соотношениями (1).
Следовательно, агрегат имеет 10 степеней свободы, т. е. его пространственная конфигурация может быть полностью определена 10-ю обобщенными координатами. Под обобщенными координатами агрегата опорных тел понимаются независимые величины, вполне определяющие все их опорные координаты, количественно устанавливаемые числом степеней свободы указанного агрегата, любые значения которых совместны с наложенными на него связями. В качестве обобщенных для упомянутого агрегата принимаются следующие координаты:
 (2)
(2)
Вместе со своими первыми производными, т. е. обобщенными скоростями, принятые обобщенные координаты, как известно, полностью определяют динамическое состояние системы, имитирующей i-й экипаж поезда (рисунок 10). При описании движения поезда учитываются следующие возмущения системы: силы основного сопротивления движению экипажей ![]() ; силы дополнительного сопротивления их движению
; силы дополнительного сопротивления их движению ![]() , возникновение которых обусловлено кривизной пути в плане; силы дополнительного сопротивления тому же движению, вызванные иными причинами (например, низкой температурой окружающей среды, ветром и т. д. - они задаются в долях от
, возникновение которых обусловлено кривизной пути в плане; силы дополнительного сопротивления тому же движению, вызванные иными причинами (например, низкой температурой окружающей среды, ветром и т. д. - они задаются в долях от ![]() с помощью коэффициента
с помощью коэффициента ![]() ); тяговые
); тяговые ![]() и тормозные
и тормозные ![]() силы, развиваемые экипажами; составляющие весов их обрессоренных
силы, развиваемые экипажами; составляющие весов их обрессоренных ![]() и необрессоренных
и необрессоренных ![]() (
(![]() номер тележки) частей, действующие коллинеарно касательным к оси пути (в точках, соответствующих началам скоростных систем координат экипажей) и обусловленные наличием его продольного уклона (угла
номер тележки) частей, действующие коллинеарно касательным к оси пути (в точках, соответствующих началам скоростных систем координат экипажей) и обусловленные наличием его продольного уклона (угла ![]() ); центростремительные силы, действующие на обрессоренные (
); центростремительные силы, действующие на обрессоренные (![]() ) и необрессоренные (
) и необрессоренные (![]() ) части экипажей коллинеарно осям
) части экипажей коллинеарно осям ![]() и
и ![]() их поточных систем, определенные кривизной пути в плане и профиле; силы
их поточных систем, определенные кривизной пути в плане и профиле; силы  и крутящие моменты
и крутящие моменты ![]() взаимодействий экипажей (с передними - 1 и задними - 2 через (
взаимодействий экипажей (с передними - 1 и задними - 2 через (![]() )-е и
)-е и ![]() -е межэкипажные соединения); моменты трения
-е межэкипажные соединения); моменты трения ![]() , возникающие в пятниковых опорах кузовов экипажей; тангенциальные
, возникающие в пятниковых опорах кузовов экипажей; тангенциальные ![]() и нормальные
и нормальные ![]() составляющие сил взаимодействия их колес с рельсами.
составляющие сил взаимодействия их колес с рельсами.
|
|
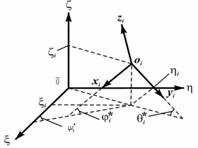
Рисунок 9 – Пространственное взаиморасположение связанной и неподвижной систем координат | Рисунок 10 – Симметрия агрегата тел, имитирующего экипаж |

Предполагается, что ![]() и
и ![]() для каждого экипажа лежат на поверхности, определяемой точками контакта бандажей его колес с головками рельсов, и направлены коллинеарно-касательно к оси пути.
для каждого экипажа лежат на поверхности, определяемой точками контакта бандажей его колес с головками рельсов, и направлены коллинеарно-касательно к оси пути.
К внешним воздействиям на поезд относятся все перечисленные выше возмущения системы, за исключением сил и крутящих моментов взаимодействий экипажей, а также моментов трения в их подпятниках. Аналитические выражения для этих воздействий таковы:
![]() (3)
(3)
где ![]() полная масса экипажа;
полная масса экипажа; ![]() удельные основное и дополнительное (возникающее вследствие кривизны пути в плане) сопротивления его движению.
удельные основное и дополнительное (возникающее вследствие кривизны пути в плане) сопротивления его движению.
Аналитические выражения обобщенных сил системы ![]() определяются как коэффициенты при вариациях соответствующих обобщенных координат в выражениях виртуальных работ.
определяются как коэффициенты при вариациях соответствующих обобщенных координат в выражениях виртуальных работ.
В случае необходимости используется правило параллельного переноса векторов сил: те из них, точки приложения которых получают вариации, без изменения направлений их векторов приводятся к центру масс тела, к которому относится варьируемая координата, с одновременным учетом вращающих моментов этих сил относительно упомянутых центров масс. Возмущения, учитываемые при описании движения поезда, распределяются между телами расчетной схемы каждого из его экипажей следующим образом: к телу ![]() приложены силы
приложены силы ![]() и крутящие моменты
и крутящие моменты ![]() , а к телам
, а к телам ![]() – силы
– силы ![]() .
.
Как было принято, векторы перечисленных выше сил, за исключением ![]() , параллельны осям поточной системы координат экипажа:
, параллельны осям поточной системы координат экипажа: ![]() и
и ![]() оси
оси ![]() оси
оси ![]() оси
оси ![]() . Пространственная ориентация векторов
. Пространственная ориентация векторов ![]() и
и ![]() определяется углами
определяется углами ![]() и
и ![]() . Кроме того, при влияниях тел
. Кроме того, при влияниях тел ![]() и
и ![]() на поверхностях контакта пятников и подпятников, как отмечалось, возникают моменты трения
на поверхностях контакта пятников и подпятников, как отмечалось, возникают моменты трения ![]() . Исходя из описанной схемы нагружения тел агрегата аналитические выражения таких сил могут быть записаны в виде
. Исходя из описанной схемы нагружения тел агрегата аналитические выражения таких сил могут быть записаны в виде
![]()











 (4)
(4) ![]()



![]()
![]()


Таким образом, на примере построения математической модели движения железнодорожного поезда по пути произвольного очертания изложена предлагаемая методика моделирования такого движения. Продемонстрируем ее использование на примерах решения некоторых задач.
Kaк отмечено во введении, решение ряда частных задач динамики поезда во многих случаях на практике сводится к независимому исследованию отдельных видов его колебаний. Например, продольно-вертикальные и боковые движения довольно часто исследуют без учета их взаимосвязи или, по крайней мере, в предположении, что они слабо связаны между собой. Для исследования некоторых процессов такое предположение может быть приемлемо, поскольку экспериментами показано, что в зависимости от состояния пути, соотношения величин его неровностей в профиле и плане, а также скорости движения поезда определяющими могут быть колебания экипажей либо в вертикальной, либо в горизонтальной плоскости.
Однако из-за наличия существенных нелинейностей для системы поезд-путь принцип суперпозиции, как правило, неприемлем. В связи с этим независимое исследование колебаний ее элементов в различных плоскостях, весьма вероятно, может привести к неверным результатам, и решение задач динамики такой системы с нелинейными пространственными, кинематическими и силовыми связями в общем случае должно вестись с использованием нелинейных пространственных моделей.
О допустимости же изолированного рассмотрения движений системы по отдельным группам координат, в частности в плоскостях симметрии ее элементов, следует судить лишь на основе анализа полной модели пространственных движений, т. е. сопоставления по критериям, представляющим наибольший интерес в данном конкретном случае исследования, результатов реализации усеченных моделей с результатами, полученными при использовании полной модели или в процессе натурного эксперимента. Использование для исследований указанных полных моделей движения системы поезд-путь необходимо еще и потому, что упрощенные постановки делают принципиально невозможным корректное решение ряда практически важных задач ее динамики.
С математической точки зрения решение задачи о движении поезда сводится к интегрированию системы обыкновенных дифференциальных уравнений при ![]() начальных условиях
начальных условиях
![]() (5)
(5)
и из-за неоднозначности функции ![]() при дополнительных условиях
при дополнительных условиях
![]() . (6)
. (6)
Высокая размерность и существенная нелинейность упомянутых уравнений делают одним из наиболее эффективных методов их решения численную машинную реализацию (на ЭВМ), что, естественно, требует разработки ее алгоритма в качестве первого этапа. Результат такого приведения может быть представлен в виде
 (7)
(7)
где  ;
;  ;
;  обобщенные координаты, скорости и ускорения системы.
обобщенные координаты, скорости и ускорения системы.
Центральным в упомянутом алгоритме машинной реализации модели движения поезда, несомненно, должен быть блок интегрирования уравнений (7). Все иные блоки должны осуществлять соответствующее информационное обеспечение этого центрального процесса. Правые части уравнений типа (7) удовлетворяют условию Липшица, поэтому, как известно, их интегрирование может вестись с применением численных методов. Результаты анализа двух основных классов численных методов решения задачи Коши – одно - и многоступенчатых - приводят к заключению, что их сравнительные достоинства и недостатки взаимодополняющие (таблица 1).
Таблица 1 – Свойства численных методов решения задачи Коши
Свойства | Типы методов | |
Одноступенчатые | Многоступенчатые | |
Возможность начать интегрирование Экономичность в смысле затрат машинного времени для получения заданной точности решения Легкость изменения шага интегрирования Легкость получения оценки ошибки ограничена | Имеются, с использованием информации только об одной предыдущей точке решения Менее экономичны, так как для получения решения в последующей точке необходимы многократные вычисления в предыдущей Шаг может быть легко изменен, так как использована информация только об одной предыдущей точке решения Получение такой оценки весьма затруднительно | Отсутствуют, так как для продолжения решения нужна информация о нескольких предыдущих его точках Более экономичны, так как используется информация о предыдущих точках решения Для изменения шага решения оно должно быть начато обычно разгоном по одношаговому методу, от предыдущей точки Ошибка ограничения получается как побочный продукт вычислений |
Это делает целесообразным комбинированное использование указанных методов:
1) начало решения (разгон) - с использованием одношагового метода (например, типа Рунге-Кутта);
2) продолжение его с помощью многошагового (итерационного) метода типа "предиктор-корректор" (Адамса-Башфорта или иного);
3) если для получения очередной точки решение требует слишком много итераций, которое больше оптимального числа или ошибка ограничения слишком велика, следует уменьшить величину шага интегрирования либо пройти соответствующий интервал с применением одноступенчатого метода на двух (или более) сгущающихся сетках с оценкой точности получаемого решения по правилу Рунге-Ромберга:
![]() (8)
(8)
где ![]() оценка погрешности решения на сетке с меньшим шагом;
оценка погрешности решения на сетке с меньшим шагом;  решения на двух сетках;
решения на двух сетках; ![]() аргумент функции
аргумент функции ![]() ;
; ![]() шаг интегрирования и кратность его увеличения;
шаг интегрирования и кратность его увеличения; ![]() порядок применяемого метода; для получения уточненного решения в точке вычисленная таким образом погрешность должна быть прибавлена к предварительному его значению:
порядок применяемого метода; для получения уточненного решения в точке вычисленная таким образом погрешность должна быть прибавлена к предварительному его значению:
![]() (9)
(9)
где ![]() предварительное и уточненное значения решения в точке;
предварительное и уточненное значения решения в точке;
4) если предпринято уменьшение шага интегрирования, то за истинное принимается ![]() , вычисленное еще достаточно точно: решение (от этой точки) снова начинается одношаговым методом с последующим переходом к многоступенчатому;
, вычисленное еще достаточно точно: решение (от этой точки) снова начинается одношаговым методом с последующим переходом к многоступенчатому;
5) в любом случае, если очередное результирующее решение получено с помощью формул коррекции, окончательное значение функции в точке рассчитывается по формуле
![]() (10)
(10)
где  исходное приближение решения в точке, полученное с помощью формулы прогноза, его значение после m-й коррекции и окончательное значение.
исходное приближение решения в точке, полученное с помощью формулы прогноза, его значение после m-й коррекции и окончательное значение.
Немаловажным вопросом, от решения которого, как известно, в значительной степени зависит корректность определения движения системы, является выбор порядка разностных формул применяемых численных методов интегрирования.
Из анализа физической сущности задачи следует, что правые части уравнений (7) ведут себя по-разному на различных участках решения. На начальном этапе интегрирования они непрерывны и ограничены вместе со своими четырьмя производными (и эти производные не слишком велики). На последующих же этапах решения упомянутые правые части непрерывны, их первые производные имеют разрывы первого рода, а вторые - второго. Из этого следует, что благодаря очень малому коэффициенту в остаточном члене и быстрому возрастанию точности при уменьшении шага для "разгона" может быть успешно применена распространенная схема четвертого порядка. На последующих же этапах решения (где ввиду указанных причин предельный порядок точности схемы четвертого порядка реализован быть не может) не худшие (однако и не лучшие) результаты дают схемы второго (т. е. равного порядку имеющихся производных правых частей интегрируемых уравнений) порядка точности. При выборе конкретных разностных формул метода прогноза-коррекции учитывается то обстоятельство, что выражение для оценки ошибки ограничения этого этапа интегрирования имеет наиболее простой вид в случае, когда формулы прогноза и коррекции обладают одним и тем же порядком точности.
Все изложенное относительно организации итерационного процесса применимо и к обобщенным скоростям. Вследствие этого экономия машинного времени за счет выбора более крупного шага интегрирования, возможного вследствие селективизации итерационного процесса по отдельным координатам и соответствующим скоростям, как показывает практика, может быть весьма ощутимой.
На рисунке 11, а и б в качестве примера приведены осциллограммы АЕ – абсолютных погрешностей вычисления продольных усилий в первом сечении трогающегося с места поезда для случаев, когда величина δi влияет и не влияет на протекающий в нем переходный процесс.
Движение определено путем численного интегрирования моделирующих его дифференциальных уравнений типа (7) с использованием описанных выше итерационных процедур, управляемых заданием различных допусков ε на их сходимость. Из упомянутых осциллограмм (каждая из которых отличается от предыдущей снижением на порядок ε, варьировавшим в пределах 0,1-0,00001) видно, что с уменьшением ε решения сходятся к точному (в качестве которого принималось полученное при h=0,001).
Однако после некоторого предела (при ε=0,0001 и особенно при ε=0,00001) из-за слишком большого накопления вычислительной погрешности итерационный процесс начинает несколько расходиться. Таким образом, хотя сам принцип покоординатной селективизации итерационного процесса на практике себя полностью оправдывает, но величина ε должна выбираться с учетом предотвращения возможности накопления недопустимо большой вычислительной полезности (а потому ухода от требуемой точности решения).
Вместе с тем необходимо иметь в виду, что, управляясь компарационным соотношением
 (11)
(11)
итерационная процедура делает выбранный метод прогноза-коррекции относительно устойчивым (в процессе вычислений с его использованием не возрастает их относительная погрешность).
а б
|
|
а – трогающегося предварительно растянутого поезда; б – трогающегося предварительно сжатого поезда Рисунок 11 - Абсолютная погрешность вычисления продольных сил в первом межэкипажном сопряжении |
При этом последовательные значения ![]() сходятся к некоторому определенному но вовсе не обязательно к точному решению интегрируемого уравнения. Разница между тем и другим представляет собой ошибку ограничения, выражение для которой может быть представлено в виде
сходятся к некоторому определенному но вовсе не обязательно к точному решению интегрируемого уравнения. Разница между тем и другим представляет собой ошибку ограничения, выражение для которой может быть представлено в виде
 .
.
Последнее свидетельствует о том, что следует ожидать скорость сходимости итерационного процесса сильно зависящей от h, величину которого исходя из критерия минимизации объема вычисления для достижения заданной точности решения необходимо выбирать такой, чтобы критерий сходимости относительно устойчивости (11) удовлетворялся после двух итераций.
Далее приводится функциональное описание иных структурных блоков искомого алгоритма, призванных, как отмечалось, осуществить должное информационное обеспечение центрального процесса численного интегрирования уравнений (7). Входным для модели в целом является информационный поток, характеризующий возмущающие воздействия на элементы системы, с одной стороны, и передаточные функции этих элементов, а также структуру системы - с другой. Вся указанная исходная информация должна быть получена моделью, проконтролирована на предмет отсутствия выхода значений параметров за допустимые ограничения (сформированные исходя из анализа физической сущности задачи), трансформирована к виду, удобному для дальнейших преобразований. На основании указанной информации должны быть определены взаимодействия в системе (силовые и моментные), что, в свою очередь, требует получения значений деформаций и скоростей деформирования ее податливых элементов, а также инерционных ускорений. Значения перечисленных величин представляют собой достаточную информационную базу для вычисления на их основе правых частей уравнений (7). Последние же, естественно, могут быть непосредственно использованы как входные для блока интегрирования. Наконец, кроме всего прочего должно быть обеспечено соответствующее управление входными, промежуточными и выходными информационными потоками модели.
На основании изложенного структурная блок-схема синтезируемого алгоритма может быть представлена в виде, изображенном на рисунке 12. Функциональное предназначение блоков следующее: MAIN - реализация алгоритма путем управления иными его структурными единицами и вывод текущих значений параметров рассматриваемого движения; PREPAR - ввод исходной информации, ее контроль, первичная обработка и приведение к виду, удобному для дальнейших преобразований; FG - определение силовых и моментных возмущений системы; GDEF - определение деформаций и скоростей деформирований податливых элементов; RPG - вычисление правых частей уравнений движения; ISE - численное интегрирование этих уравнений; EXTREM - выбор экстремальных значений обобщенных координат и скоростей системы, а также действующих в ней возмущений; PR - вывод результатов функционирования предыдущего блока.
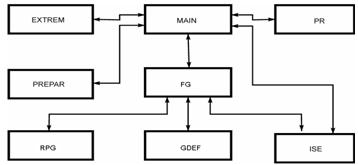
Рисунок 12 – Блок-схема программы реализации на ПЭВМ модели
движения поезда
В целях машинной реализации модели движения поезда структурные блоки описанного алгоритма были приняты в качестве глобальных модулей верхнего уровня программы для ПЭВМ. При этом между упомянутыми блоками алгоритма и модулями программы была обеспечена преемственность как мнемоники наименований, так и функционального предназначения. В основу разработки программы были положены принципы нисходящего (сверху вниз) проектирования и модульности.
Исходя из этого результат действия (т. е. функциональное предназначение) каждого из упомянутых выше программных модулей верхнего уровня методом отрабатывания назад представлялся в виде суммарной совокупности результатов действия более простых модулей нижележащего иерархического уровня. Пользуясь методом рекурсии в отношении последней процедуры (т. е. функционально дробя результаты работы модулей все более низкого уровня и представляя их в виде совокупности результатов действия модулей еще более низкой иерархии), можно прийти в конечном счете к таким примитивам (элементарным арифметическим и логическим операциям), которые могут быть программно оформлены в виде конечного числа элементарных операторов ФОРТРАНа.
При этом логически замкнутые (т. е. такие, результаты действий которых могут быть интерпретированы как некоторые физические величины, характеризующие компоненты вектора состояния системы, передаточные функции ее элементов или возмущающие воздействия на них) группы операторов программно оформлялись в виде отдельных, структурно взаимодействующих функциональных модулей. Упомянутые модули, вместе с тем достаточно независимы в отношении таких факторов, как логическая структура программы (алгоритма), аргументы или параметры модуля, внутренние переменные таблицы и константы, структура и формат баз данных, модульная структура управления программой (каждый модуль имеет ограниченное число, в основном по одному, входов и выходов), при полной детерминированности межмодульных интерфейсов.
При достаточно гибком маневрировании в пределах отведенных задаче машинных ресурсов программа позволяет решать значительное число практически важных задач динамики подвижного состава. Конкретный круг таких задач, по-видимому, может быть очерчен теми из них, которые, с одной стороны, требуют достаточно детального рассмотрения динамики пространственных движений экипажей в поезде с учетом особенностей существенно нелинейных пространственных взаимодействий между ними, но с другой – могут без существенного ущерба для точности решаться без дальнейшей детализации расчетной схемы системы поезд-путь. К таким задачам, например, относятся: исследование устойчивости от схода с рельсов и соскока со шкворней единиц подвижного состава при движении поезда по пути, имеющему различную конфигурацию в профиле и плане; оценка рациональности выбора параметров пути, в частности его плана, исходя из условий обеспечения упомянутой устойчивости от выжимания (выдергивания) экипажей из поезда и иных критериев; оценка пространственной нагруженности кузовов экипажей в различных условиях движения и ряд других. Это, однако, не исключает, а предполагает возможность дальнейшего расширения круга таких задач, эффективно решаемых с применением разработанной программы, что, как отмечалось выше, требует детализации расчетной схемы рассматриваемой системы, соответствующего дополнения модели ее движения и отражения этих дополнений в машинной программе его определения.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
