
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 625.032.05 На правах рукописи
баймухамбетова мария куандыковна
Исследование безопасности и устойчивости движения поезда по пути произвольной пространственной конфигурации
05.22.06 – Железнодорожный путь, изыскание
и проектирование железных дорог
Автореферат
диссертации на соискание ученой степени
доктора технических наук
Республика Казахстан
Алматы, 2010
Работа выполнена в Казахском университете путей сообщения
Научный руководитель доктор технических наук
Официальные оппоненты: доктор технических наук
,
доктор технических наук
,
доктор технических наук
Ведущая организация Сибирский государственный
университет путей сообщения
(г. Новосибирск, РФ)
Защита состоится 24 июня 2010 г. в 14.00 на заседании диссертационного совета Д14.64.45 в Казахском университете путей сообщения г. Алматы, мкрн «Жетысу-1», дом 32а, ауд. 101.
С диссертацией можно ознакомиться в научной библиотеке Казахского университета путей сообщения г. Алматы, мкрн «Жетысу-1», дом 32а, тел.: 8 78, , e-mail: *****@***kz.
Автореферат разослан 24 мая 2010 г.
Ученый секретарь диссертационного совета |
| А. Кайнарбеков |

ВВЕДЕНИЕ
Повышение объемов грузо - и пассажироперевозок, интенсификация работы транспорта вызывают рост динамической нагруженности элементов системы поезд-путь. В связи с этим особую важность приобретает изучение ее динамических качеств в условиях, максимально приближенных к эксплуатационным, в целях выявления резервов в существующих конструкциях и определения рациональных конструктивных схем и параметров проектируемых подвижного состава и пути.
Усилиями многих ученых заложены основы динамики поезда. Существенный вклад в развитие ее теории, а также методики поездных испытаний внесли , , , , а также отечественные ученые , , и другие.
В зависимости от целей исследования, основной из которых являлось определение продольных сил и устойчивости экипажей против схода с рельсов, движение поезда рассматривалось происходящим на прямом горизонтальном, ломаном в профиле или искривленном в плане пути. Целями исследования определялись рассматриваемые пространственные размерности такого движения (продольное, продольно-вертикальное, продольно-горизонтальное или пространственное) и его режим (тяга или торможение), а также учет или неучет влияния на него нелинейностей системы поезд-путь (в основном продольных зазоров в межэкипажных соединениях).
Неодинаковы, как известно, и методы исследований рассматриваемых движений. Некоторые из них проводились эмпирическим путем, с последующей обработкой, анализом и обобщением результатов натурных экспериментов, на основании которых делались выводы относительно характера протекающих в системе процессов. В ряде работ использован метод физического моделирования. Однако в последние годы исследования динамики поезда все чаще осуществляются с использованием метода математического моделирования, позволяющего определять его состояния как аналитически, так и с применением аналоговой или цифровой вычислительной техники.
К настоящему времени в исследованиях динамики подвижного состава все большее распространение получают аналитические математические модели. Однако некоторые из таких исследований ведутся с применением экспериментально-статистического моделирования. Как известно, рациональность детерминистического или стохастического подхода обусловливается степенью неполноты информации.
При построении математической модели движения одним из определяющих является, как известно, вопрос о выборе расчетной схемы его объекта. Компромисс между основными характеристиками таких схем - универсальностью и эффективностью обычно достигается минимальной их сложностью, обеспечивающей лишь необходимую точность решения стоящей задачи. Такой подход позволяет получить освобожденное от несущественных деталей изображение того, что наиболее важно при изучении движения. К сожалению, пока не существует универсального метода выбора оптимальной для решения конкретной задачи расчетной схемы системы. Поэтому составленная, как правило, исходя из эвристических соображений первоначальная ее блок-схема преобразуется далее на основании либо результатов ранее проведенных исследований, либо из сравнения свойств нескольких схем различной сложности. При этом обычно принимают следующие два вида допущений:
1 Допущения, уменьшающие число степеней свободы системы, например: железнодорожный путь не обладает упругими свойствами и не имеет локальных неровностей; колесные пары катятся по рельсам без проскальзывания и могут лишь вращаться вокруг своих осей; экипажи, включенные в состав поезда, идентичны, упругие элементы системы поезд-путь не обладают инерционными свойствами, их деформации в направлениях некоторых осей отсутствуют; отсутствуют взаимные перемещения отдельных элементов системы вдоль некоторых направлений и т. п.
2 Допущения, с принятием которых сокращается число связанных дифференциальных уравнений, описывающих движение поезда, или упрощается их вид, например: оси галопирования кузовов экипажей совпадают с их главными центральными поперечными осями инерции; конструкции кузовов, грузов и тележек экипажей симметричны относительно их главных центральных осей инерции; вводятся новые обобщенные координаты, позволяющие устранить или упростить динамические и (или) статические связи и т. п.
Таким образом, суть вводимых идеализаций, как видно, в основном касается несущественных, второстепенных процессов и мало затрагивает изучаемые и сильно с ними связанные. Достигается это тем, что в основу выбора расчетной схемы системы кладется принцип ее разделения на подсистемы, выделения элементарных блоков и замены их динамическими аналогами с последующим синтезом обобщенной внутренней структуры.
Подход к выбору расчетной схемы поезда исторически реализовался с самого начала изучения его движения. Одним из первых оно было рассмотрено русским ученым-механиком ским. Для исследования одномерных продольных колебаний поезда он предложил две расчетные схемы: дискретную одномерную цепочку точечных масс и сплошной однородный стержень с грузом на конце. При рассмотрении вопроса об определении усилий в упряжных приборах, возникающих вследствие трогания поезда с места и его движения по ломаному в профиле пути, он ввел целый ряд допущений, что, с одной стороны, позволило довести исследование до простых аналитических выражений для искомых усилий, но с другой – придало ему известную ограниченность - возможно получение лишь верхних оценок усилий и т. д. Следующий основополагающий вклад в вопрос о выборе расчетной схемы поезда был сделан академиком . Исходя из анализа результатов теоретико-экспериментальных исследований он в значительной степени обобщил две основные расчетные схемы, предложенные : поезд рассматривается в виде цепочки материальных точек, имитирующих экипажи, соединенные податливыми, в общем случае существенно нелинейными элементами, либо в виде сплошного стержня с упругими несовершенствами и грузами, имитирующими локомотивы. Кроме того, была предложена третья расчетная схема поезда - в виде «стержня с сингулярной податливостью». Для всех трех схем показаны границы применимости и рациональные условия использования.
Усилия по уточнению расчетных схем экипажей как элементов поезда в соответствии с выдвигаемыми практикой задачами предпринимались не только школой механиков железнодорожного транспорта, созданной академиком , но и научными коллективами Москвы, Санкт-Петербурга, Брянска, Харькова и т. д. В ряде таких исследований экипажи представлялись в виде агрегатов плоских звеньев или трехмерных твердых тел. При этом соответственно рассматривались плоские или пространственные их колебания.
В дополнение при изучении системы экипаж-путь как парциальной, по отношению к полной системе поезд-путь в ряде исследований учитывались инерционные и диссипативные свойства рельсошпальной решетки и основания пути, а также локальные неровности рельсовых нитей.
Движения экипажей, являясь сложными, обычно рассматриваются с использованием подвижных систем координат - плоских или пространственных. Взаиморасположение их, как правило, определяется линейными и угловыми координатами, последние из которых составляют одну из систем типа углов Эйлера в каноническом виде, углов Брайнта, корабельных, самолетных или некоторых иных.
Для корректного определения состояния поезда не менее определяющим, чем выбор расчетной схемы системы поезд-путь, является также подбор способа описания этого состояния. В зависимости от скорости протекания процессы в упомянутой системе могут носить квазистатический или динамический характер. В соответствии с этим для их описания могут применяться уравнения равновесия или движения. В первом случае рассматривается равновесие поезда под действием приложенных к его экипажам сил и моментов. Такой подход, существенно упрощая исследования в относительно несложных случаях, когда не требуется получение закона движения системы, а необходимо лишь выяснение вопроса о формах ее равновесия и оценке верхних границ возникающих сил и моментов, может дать корректное решение ряда практически важных задач. К ним относятся такие, например, как устойчивость экипажей против схода с рельсов; получение характеристик нагруженности и деформируемости элементов подвижного состава, перевозимых грузов и пути с учетом их пространственных движений; выбор или корректировка по различным критериям плана и профиля пути в их взаимосвязи; оценка динамических качеств пассажирских поездов и т. д. Поэтому проблема изучения пространственных движений поезда по пути произвольного очертания при наличии в системе существенных нелинейностей является весьма актуальной. В качестве базы для ее решения может быть предложена излагаемая в работе достаточно общая методика математического моделирования такого движения, разработанная с применением уравнений Лагранжа 2-го рода взаимоподвижных систем координат.
Актуальность проблемы. Интенсификация работы транспорта вызывает повышение динамической нагруженности элементов системы поезд-путь. Необходимость корректного решения возникающих в связи с этим задач, таких, как устойчивость экипажей в колее при движении в составе железнодорожного поезда, проектирование пути и т. д., требует в общем случае рассмотрения пространственных движений. Поэтому весьма актуальной является проблема расчета параметров таких движений поезда по пути произвольного очертания при наличии в системе существенных нелинейностей.
Целью работы является создание методики математического моделирования, создание алгоритма и программы расчетов на ЭВМ динамики системы поезд-путь с учетом пространственности движений экипажей, существенных нелинейностей, произвольности очертания пути; исследование степени и характера влияния параметров системы на продольные усилия в поезде, кинетику взаимодействия экипажей, их устойчивость против схода с рельсов.
Идея работы заключается в выработке рекомендаций по оценке продольной нагруженности экипажей и их устойчивости против схода с рельсов, а также применимости предлагаемой методики для решения ряда иных практически важных задач динамики системы поезд-путь.
В соответствии с поставленной целью и идеей в диссертационной работе решены следующие задачи:
- осуществлено математическое моделирование движения поезда по пути произвольной пространственной конфигурации;
- составлена расчетная схема системы поезд-путь;
- установлены основные кинематические соотношения системы поезд-путь;
- выведены аналитические уравнения движения поезда по пути произвольной пространственной конфигурации;
- выполнено математическое моделирование внешних воздействий на поезд;
- исследованы на ЭВМ режимы движения поезда по пути произвольной пространственной конфигурации.
Объект исследований: система поезд-путь, динамические взаимодействия экипажей при движении железнодорожного поезда по пути произвольной пространственной конфигурации.
Предмет исследований: оптимизация межэкипажных сил взаимодействия железнодорожных экипажей в системе поезд-путь при движении по пути произвольной пространственной конфигурации.
Использованные методы. В работе использован метод математического моделирования. Численное интегрирование уравнений движения системы проведено при рациональном сочетании одно - и многошагового методов с привлечением приема покоординатной индивидуализации итерационного процесса.
Научная новизна работы состоит в следующем: разработана методика математического моделирования движения железнодорожного поезда с существенными кинематическими и силовыми нелинейностями по пути произвольной конфигурации; построена одна из возможных моделей такого движения; выполнено моделирование пространственных движений межэкипажных соединений; созданы алгоритм и программа численной реализации на ЭВМ модели движения поезда; на единой модельной базе проведено исследование движений поезда по пути пространственного очертания в основных эксплуатационных режимах; проанализировано влияние главных параметров системы на продольную нагруженность экипажей, характер их взаимодействий и устойчивость против схода с рельсов; даны рекомендации по оценке нагруженности и устойчивости экипажей против схода с рельсов, а также применимости предлагаемой методики для решения ряда иных практически важных задач динамики системы поезд-путь.
Практическая ценность диссертации заключается в разработке методики (включая алгоритм и программу для ЭВМ) решения ряда задач, связанных с эксплуатацией поездов, проектированием подвижного состава и пути, а также в получении новых результатов о степени и характере влияния: колебаний экипажей и очертания пути в плане и профиле одновременно на продольную нагруженность поезда и пространственные движения его сопряжений; параметров системы поезд-путь на устойчивость экипажей против схода с рельсов; кривизны пути в плане на максимальные продольные силы в поезде; размеров окон ударных розеток на максимальные поперечные усилия в автосцепных узлах. С использованием упомянутой методики обоснована возможность определения продольной нагруженности поезда с учетом в большинстве случаев только продольных его колебаний, подтверждены рекомендации по повышению устойчивости экипажей против схода с рельсов. Предлагаемая методика может применяться для решения задач о выборе или корректировке по различным критериям плана и профиля пути в их взаимосвязи, об оценке на стадиях проектирования или модернизации параметров подвижного состава по условиям устойчивости против схода с рельсов, о моделировании движений межэкипажных соединений с целью выбора их рациональных параметров, об оценке нагруженности и деформируемости элементов подвижного состава и перевозимых грузов с учетом их пространственных движений, а также ряда иных, не менее важных задач.
Научные положения, выносимые на защиту:
- математическая модель движения поезда по пути произвольной пространственной конфигурации;
- расчетная схема системы поезд-путь для случая движения поезда по пути произвольной пространственной конфигурации;
- аналитические выражения основных кинематических соотношений системы поезд-путь;
- аналитические уравнения движения поезда по пути произвольной пространственной конфигурации;
- методика математического моделирования пространственных движений железнодорожного поезда по пути произвольной пространственной конфигурации.
Личный вклад автора:
- выполнено моделирование пространственных движений межэкипажных соединений;
- созданы алгоритм и программа реализации модели на ПЭВМ;
- предложены приемы реализации численных методов нахождения движений системы поезд-путь, рационально использующие ресурсы ПЭВМ;
- подтверждены известные выводы о путях повышения устойчивости экипажей против схода с рельсов;
- разработана методика изучения динамики системы поезд-путь;
- решена задача о влиянии колебаний экипажей и очертания пути (в плане и профиле одновременно) на кинематику межэкипажных сопряжений поезда и продольные силы в нем;
- выполнен анализ влияния основных параметров системы поезд-путь на устойчивость экипажей против схода с рельсов;
- проведена апробация методики изучения динамики системы поезд-путь сравнением построенной модели движения поезда в частных случаях с известными (проверенными экспериментом) моделями, тестовых его движений, определенных с использованием предлагаемой и применявшейся (для исследований поезда как одномерной системы и проверенной натурным экспериментом) программ.
Достоверность научных положений, выводов и рекомендаций подтверждается глубоким и тщательным анализом литературных источников, корректной постановкой задачи исследования, применением математического аппарата, обработкой большого количества статистического материала и практическими результатами.
Реализация работы. Результаты выполненных теоретических исследований использованы при реализации отраслевой комплексной программы, проблемы 22.00.00 «Разработка и внедрение ресурсосберегающих технологий на железных дорогах Казахстана», в структурных подразделениях АО «НК» «КТЖ», а также внедрены в учебные процессы КУПС и КазАТК.
Апробация работы. Основные положения работы доложены и получили одобрение на заседаниях кафедр «Строительство транспортных сооружений» КУПС, «Строительство» КазАТК им. М. Тынышпаева, а также на международных научно-практических конференциях: «Инновационные процессы в развитии транспортно-коммуникационного комплекса» (Алматы, КУПС, 2009), «Научная индустрия европейского континента» (Чехия, 2009), «Инновационные процессы в развитии транспортно-коммуникационного комплекса» (Алматы, КазАТК, 2009), «Ресурсосберегающие технологии на железнодорожном транспорте» (Ташкент, ТашИИТ, 2009), «Повышение эффективности автоматизированных систем управления перевозочным процессом в транспортных системах в новых информационных технологиях» (Алматы, КазАТК, 2010), «Механика и строительство транспортных сооружений» (Алматы, КазГАСА, 2010).
Публикации. По теме диссертации опубликовано 40 печатных работ, в том числе в изданиях, рекомендованных КНАСОН МОН РК.
Структура и объем работы. Диссертация состоит из введения, шести разделов, заключения, списка использованной литературы.
Основная часть
Во введении дан обзор литературы по исследованию динамики поезда, показана актуальность темы работы, сформулирована постановка решаемой задачи.
В целях отражения в искомой расчетной схеме лишь наиболее существенных для изучаемого движения поезда свойств реальной системы поезд-путь в основу выбора такой схемы положен принцип дискретизации системы на элементы и замены их динамическими аналогами с последующим синтезом обобщенной внутренней структуры имитационной системы. Для достижения разумного компромисса между универсальностью, в смысле возможности решения достаточно широкого круга задач динамики поезда, и эффективностью при решении каждой такой задачи указанная расчетная схема при минимально возможной сложности должна допускать достаточно глубокую декомпозицию и глобальное агрегирование, если это требуется (допускается) решаемой задачей, без принципиальных трудностей при построении и реализации соответствующих моделей движений.
Для построения аналитической математической модели движения поезда по пути произвольной пространственной конфигурации выбирается расчетная схема системы поезд-путь. Она представляется в виде агрегата звеньев, каждое из которых, в свою очередь, является расчетной схемой одного из элементов системы - экипажа или пути. Структура такого агрегата, т. е. способ соединения его звеньев, выбирается таким образом, чтобы учесть реальный характер динамических взаимодействий между упомянутыми элементами.
Исходя из изложенного полагается, что в состав поезда включены идентичные четырехосные грузовые вагоны, имеющие одноступенчатое рессорное подвешивание и пятниковое опирание кузовов на тележки, а динамические схемы локомотивов сведены к аналогичным вагонным. В таком случае расчетная схема i-го экипажа поезда принимается в виде агрегата трех опорных тел (рисунок 1). Под опорными понимаются свободные твердые тела, не связанные друг с другом, до их объединения в агрегат. Одно из них массой mi соответствует обрессоренным частям экипажа: кузову и надрессорным балкам, а два другие массой mi1 каждое - необрессоренным: рамам тележек, буксовым узлам, колесным парам. Тогда у каждого агрегата, имитирующего экипаж, будет такая структура, т. е. способ соединения составляющих его опорных тел, в которой тела mi1 соединены с телом mi - податливыми элементами, имитирующими рессорное подвешивание. Предполагается, что в тела mi1 включены по две колесные пары, имеющие возможность лишь вращаться вокруг своих осей.
Рисунок 1 – Расчетная схема экипажа
Вследствие специфичности наложенных на экипаж связей не допускаются взаимные продольные перемещения указанных тел, но допускаются обезгруживания тележек, вплоть до отрыва подпятников от пятников.
Упруго-диссипативные свойства кузова и автосцепок экипажа имитируются деформируемыми блоками. Каждый такой блок (рисунок 2) состоит из упругих элементов: одного жесткостью ![]() , четырех жесткостями по
, четырех жесткостями по ![]() ,
, ![]() и одного жесткостью
и одного жесткостью ![]() , а также диссипативных элементов: одного с коэффициентом вязкой диссипации
, а также диссипативных элементов: одного с коэффициентом вязкой диссипации ![]() , четырех с коэффициентами
, четырех с коэффициентами ![]() ,
, ![]() и одного с коэффициентом
и одного с коэффициентом ![]() . Элементы
. Элементы ![]() и
и ![]() имитируют податливые свойства кузова и поглощающих аппаратов автосцепок при растяжении-сжатии, элементы
имитируют податливые свойства кузова и поглощающих аппаратов автосцепок при растяжении-сжатии, элементы ![]() и
и ![]() - крутильные свойства тех же конструкций, а элементы
- крутильные свойства тех же конструкций, а элементы ![]() ,
, ![]() ,
, ![]() ,
, ![]() - изгибные свойства кузова в вертикальной и горизонтальной его продольных плоскостях симметрии. В описываемой расчетной схеме экипажа учитывается также наличие поперечных по отношению к осям сцепок, вертикальных и горизонтальных зазоров между их хвостовиками и ударными розетками. Принимается, что в случае, когда вертикальная продольная плоскость симметрии экипажа компланарна плоскости, касательной к поверхности, направляющей которой является ось пути, а образующей - бинормаль к этой кривой в каждой ее точке, средние радиусы катания бандажей колесных пар экипажа равны и они катятся без проскальзывания.
- изгибные свойства кузова в вертикальной и горизонтальной его продольных плоскостях симметрии. В описываемой расчетной схеме экипажа учитывается также наличие поперечных по отношению к осям сцепок, вертикальных и горизонтальных зазоров между их хвостовиками и ударными розетками. Принимается, что в случае, когда вертикальная продольная плоскость симметрии экипажа компланарна плоскости, касательной к поверхности, направляющей которой является ось пути, а образующей - бинормаль к этой кривой в каждой ее точке, средние радиусы катания бандажей колесных пар экипажа равны и они катятся без проскальзывания.
При решении большинства практически важных задач динамики поезда приходится принимать во внимание зазоры в упряжи, работу поглощающих аппаратов, иные существенные нелинейности системы. Это обусловливает необходимость при рассмотрении нестационарных продольных колебаний в качестве его расчетной схемы принимать цепочку абсолютно твердых тел, соединенных существенно нелинейными податливыми элементами.
Рисунок 2 – Расчетная схема деформируемого блока экипажа
Естественным развитием такой схемы на случай исследования пространственных движений на пути произвольной конфигурации является трехмерный ее аналог. Поэтому в качестве расчетной схемы поезда (рисунок 3) принимается пространственная цепочка экипажей, соединенных существенно нелинейными безынерционными податливыми агрегатами. Каждый такой агрегат синтезирует в себе свойства как описанных элементов, имитирующих податливые свойства кузовов и автосцепок сопрягаемых экипажей при растяжении-сжатии и кручении, так и продольного - вдоль оси сопряжения - и крутильного - вокруг этой оси - зазоров кинематической цепи: сопрягаемые экипажи - соединяемые автосцепки. Указанные податливые агрегаты (рисунок 3) располагаются вдоль продольных осей имитационных межэкипажных соединений и крепятся каждый к телам ![]() и
и ![]() агрегатов, имитирующих сопрягаемые экипажи, с помощью пространственных шаровых закрывающихся шарниров. Под последними подразумевается имитационное отражение в расчетной схеме поезда того факта, что, как отмечено при описании схемы экипажа, в действительности свободные повороты хвостовиков сопряженных автосцепок относительно продольных осей кузовов своих экипажей возможны лишь в пределах поперечных зазоров между их гранями и стенками ударных розеток, а также в пределах крутильных зазоров - вокруг своих продольных осей. Таким образом, усилия - продольные и поперечные по отношению к оси сопряжения, а также крутящие моменты вокруг этой оси - между экипажами могут передаваться лишь после «закрытия» соответствующего зазора. Кроме того, считается что продольная ось межэкипажного соединения является отрезком прямой, т. е. не имеет излома в месте соединения головок автосцепок.
агрегатов, имитирующих сопрягаемые экипажи, с помощью пространственных шаровых закрывающихся шарниров. Под последними подразумевается имитационное отражение в расчетной схеме поезда того факта, что, как отмечено при описании схемы экипажа, в действительности свободные повороты хвостовиков сопряженных автосцепок относительно продольных осей кузовов своих экипажей возможны лишь в пределах поперечных зазоров между их гранями и стенками ударных розеток, а также в пределах крутильных зазоров - вокруг своих продольных осей. Таким образом, усилия - продольные и поперечные по отношению к оси сопряжения, а также крутящие моменты вокруг этой оси - между экипажами могут передаваться лишь после «закрытия» соответствующего зазора. Кроме того, считается что продольная ось межэкипажного соединения является отрезком прямой, т. е. не имеет излома в месте соединения головок автосцепок.
Путь представляется в виде полупространства, ограниченного ленточной поверхностью, определяемой рабочими поверхностями головок рельсовых нитей, которые считаются имеющими бесконечные жесткости во всех направлениях, кроме поперечно-горизонтального, не имеющими локальных неровностей ни в одном из направлений и симметричными относительно оси пути. В расчетной схеме системы принимается во внимание наличие разбегов колесных пар в колее. Основные параметры пути, необходимые в расчетах, - длины участков, их кривизны в плане и профиле, пространственные координаты точек оси, продольные и поперечные уклоны, азимутальные углы и т. д. - определяются технической документацией по его возведению.

Рисунок 3 – Расчетная схема поезда
Учет неголономности связей в расчетной схеме рельсового экипажа не приближает модель его движения к действительности. На основании этого предполагается, что на опорные тела расчетной схемы системы при их агрегировании наложены только голономные связи и поэтому она является голономной.
Выбранная таким образом расчетная схема системы в зависимости от решаемой задачи и целей исследований без выхода за рамки предлагаемой методики моделирования динамики поезда может быть легко трансформирована как в сторону более подробного рассмотрения отдельных элементов - путем декомпозиции их расчетных схем, так и в сторону усечения - путем объединения тел таких схем в укрупненные. Однако необходимая степень детализации или возможность усечения упомянутой расчетной схемы системы в каждом конкретном случае должна быть обоснована. Указанное значительно повышает универсальность предлагаемой методики моделирования движения поезда, т. е. расширяет круг задач его динамики, эффективно решаемых с ее использованием.
Как известно, вид математической модели движения зависит от выбора координат, в которых оно рассматривается. Сравнительная ограниченность района в отношении скорости движения железнодорожного поезда позволяет рассматривать его происходящим около «плоской неподвижной» Земли. Иными словами, при рассмотрении такого движения геотопическую (жестко связанную с поверхностью Земли) систему отсчета можно приближенно считать инерциальной. Исходя из изложенного движение экипажа поезда по пути рассматривается с использованием следующих правых взаимоподвижных декартовых систем координат:
1 Неподвижной инерциальной базовой геотопической ![]() , плоскость
, плоскость ![]() которой занимает некоторое заданное неизменное положение, а ось
которой занимает некоторое заданное неизменное положение, а ось ![]() направлена вверх. В зависимости от способа введения эта система координат может связываться либо локально с элементом пути (при этом каждый из них имеет свою неподвижную систему), либо глобально со всем его участком, на котором рассматривается движение поезда. При первом способе введения (рисунок 4, а) неподвижная система ориентируется так, что проекции оси элемента пути (к которому она относится) на ее плоскости
направлена вверх. В зависимости от способа введения эта система координат может связываться либо локально с элементом пути (при этом каждый из них имеет свою неподвижную систему), либо глобально со всем его участком, на котором рассматривается движение поезда. При первом способе введения (рисунок 4, а) неподвижная система ориентируется так, что проекции оси элемента пути (к которому она относится) на ее плоскости ![]() и
и ![]() являются дугами окружностей некоторых постоянных (в пределах такого элемента) радиусов. При втором способе введения (рисунок 4, б) плоскость
являются дугами окружностей некоторых постоянных (в пределах такого элемента) радиусов. При втором способе введения (рисунок 4, б) плоскость ![]() такой системы удобно расположить компланарно плоскости местного горизонта на уровне моря (так как при этом аппликата любой точки оси пути есть ее высота над этим уровнем - величина, определяемая строительной документацией по его возведению), а ось
такой системы удобно расположить компланарно плоскости местного горизонта на уровне моря (так как при этом аппликата любой точки оси пути есть ее высота над этим уровнем - величина, определяемая строительной документацией по его возведению), а ось ![]() - так, чтобы она занимала положение, обратное азимутальному (т. е. была направлена с севера на юг).
- так, чтобы она занимала положение, обратное азимутальному (т. е. была направлена с севера на юг).
а б
![]()
![]()
Рисунок 4 – Способы введения неподвижной системы координат
Ось ![]() при этом автоматически занимает положение местной вертикали. Каждый из указанных способов введения неподвижной системы имеет при решении конкретной задачи определенные преимущества и недостатки, так что выбор между ними определяется обеспечением удобства рассмотрения. Для определенности рассуждений далее везде будет предполагаться второй способ введения такой системы координат.
при этом автоматически занимает положение местной вертикали. Каждый из указанных способов введения неподвижной системы имеет при решении конкретной задачи определенные преимущества и недостатки, так что выбор между ними определяется обеспечением удобства рассмотрения. Для определенности рассуждений далее везде будет предполагаться второй способ введения такой системы координат.
а б
![]()
![]()
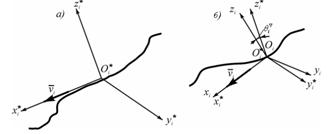
Рисунок 5 – Пространственная ориентация скоростной (а) и поточной (б) систем координат
2 Скоростной естественной  (рисунок 5, а), начало которой скользит вдоль кривой оси пути со скоростью
(рисунок 5, а), начало которой скользит вдоль кривой оси пути со скоростью ![]() движения экипажа, а оси вместе с соединяющими их координатными плоскостями образуют сопровождающий трехгранник этой кривой. Ось
движения экипажа, а оси вместе с соединяющими их координатными плоскостями образуют сопровождающий трехгранник этой кривой. Ось ![]() при этом имеет направление
при этом имеет направление ![]() . С каждым экипажем связывается одна такая система, характеризующая его невозмущенное движение вдоль оси пути.
. С каждым экипажем связывается одна такая система, характеризующая его невозмущенное движение вдоль оси пути.
3 Поточной ![]() (рисунок 5, б), отличающейся от скоростной лишь тем, что ее плоскость
(рисунок 5, б), отличающейся от скоростной лишь тем, что ее плоскость ![]() повернута относительно плоскости
повернута относительно плоскости  на угол скоростного крена
на угол скоростного крена ![]() . У этих систем, естественно, совпадают начала (точки
. У этих систем, естественно, совпадают начала (точки ![]() и
и ![]() ) и оси
) и оси ![]() и
и ![]() . Ось же
. Ось же ![]() поточной системы скользит по головкам рельсовых нитей. С экипажем связывается одна поточная система, отслеживающая пространственную конфигурацию поверхности пути, по которому он движется.
поточной системы скользит по головкам рельсовых нитей. С экипажем связывается одна поточная система, отслеживающая пространственную конфигурацию поверхности пути, по которому он движется.
4 Связанной ![]() (рисунок 6), каждая из которых относится к одному из тел расчетной схемы экипажа. Начало такой системы совпадает с центром масс упомянутого (n-го) тела, а оси являются его главными центральными осями инерции. Для экипажа вводится столько связанных систем, сколько опорных тел в его расчетной схеме.
(рисунок 6), каждая из которых относится к одному из тел расчетной схемы экипажа. Начало такой системы совпадает с центром масс упомянутого (n-го) тела, а оси являются его главными центральными осями инерции. Для экипажа вводится столько связанных систем, сколько опорных тел в его расчетной схеме.
Рисунок 6 – Расположение связанной системы координат одного из тел расчетной схемы экипажа
Попарное пространственное взаиморасположение введенных координатных систем определяется линейными и угловыми координатами (последние из которых составляют одну из полных систем самолетных углов) следующим образом:
- каждой из связанных систем координат относительно поточной того же экипажа (рисунок 7) - линейными координатами ![]() ,
, ![]() ,
, ![]() (характеризующими колебания подергивания, бокового относа и подпры-гивания п-го тела расчетной схемы экипажа) и угловыми: углом атаки
(характеризующими колебания подергивания, бокового относа и подпры-гивания п-го тела расчетной схемы экипажа) и угловыми: углом атаки ![]() (галопирования) между вектором скорости экипажа
(галопирования) между вектором скорости экипажа ![]() (осью
(осью ![]()
![]() ) и плоскостью
) и плоскостью ![]() ; углом скольжения
; углом скольжения ![]() (виляния) между проекцией
(виляния) между проекцией ![]() на плоскость
на плоскость ![]() и осью
и осью ![]() , углом поперечной (боковой) качки
, углом поперечной (боковой) качки ![]() , между осью
, между осью ![]() и плоскостью
и плоскостью ![]() ;
;

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
