


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
На правах рукописи
ЛЬВОВ Пётр Алексеевич
РАЗРАБОТКА МЕТОДОВ, АЛГОРИТМОВ И ПРОГРАММ ДЛЯ СВЧ-ПРЕОБРАЗОВАТЕЛЕЙ ИНФОРМАЦИИ
В СИСТЕМАХ УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ ОБЪЕКТАМИ
05.13.05 – Элементы и устройства вычислительной техники и систем
управления
А в т о р е ф е р а т
диссертации на соискание ученой степени
кандидата технических наук
Саратов – 2011
Работа выполнена в ГОУ ВПО «Саратовский государственный
технический университет».
Научный руководитель: | доктор технических наук, профессор |
Официальные оппоненты: | доктор технических наук, профессор |
доктор технических наук, профессор | |
Ведущая организация: | Институт проблем точной механики и управления РАН (г. Саратов) |
Защита состоится «18» мая 2011 г. в 15 часов на заседании
диссертационного совета Д 212.242.08 при ГОУ ВПО «Саратовский
государственный технический университет» г. Саратов, ул. Политехническая, 77, ауд. 212/2.
С диссертацией можно ознакомиться в читальном зале научно-технической библиотеки ГОУ ВПО «Саратовский государственный
технический университет».
Автореферат разослан «14» апреля 2011 г.
Ученый секретарь диссертационного совета |
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. Эффективность ряда систем управления в современных телекоммуникационных комплексах, в военной и космической технике во многом определяется характеристиками контуров обратной связи, одним из основных элементов которых являются СВЧ-преобразователи информации (СПИ). В настоящее время при построении этих преобразователей обычно используется метод векторного вольтметра. Он требует применения дорогостоящего СВЧ оборудования, ориентировочная стоимость которого составляет 50 ¸ 100 тысяч долларов США, что существенно ограничивает его использование в прикладных областях.
В 1972 году Г. Энген и К. Хоэр предложили альтернативный векторному вольтметру метод многополюсного рефлектометра. Однако этот способ не нашёл широкого применения из-за сложности процедуры калибровки преобразователя и отсутствия у большинства исследователей нагрузок с достаточно точно известными параметрами в широком диапазоне частот. Поэтому созданные экспериментальные образцы автоматических СПИ, основанные на многополюсниках и описанные в зарубежной литературе (Т. Якабе, М. Киношита, Х. Ябе, Ф. Ганнучи, К. Ивамото, К. Фуджи, Х. С. Лю, Т. Х. Чу, А. Штельцер, С. Дискус, К. Любке, Х. Тим), оказались неудачными из-за высокой их стоимости и низкой точности проводимых измерений.
В конце прошлого века группой отечественных исследователей (, , ) разработан СПИ в виде комбинированного многополюсного рефлектометра, часть датчиков которого слабо связана с полем внутри тракта и является многозондовой измерительной линией. Это устройство может быть откалибровано по набору нагрузок с неточно известными параметрами отражения, если достаточно точно известны расстояния от плоскости подсоединения исследуемого объекта до датчиков многозондовой линии, что его существенно упрощает и удешевляет. Однако в сантиметровом и миллиметровом диапазонах длин волн относительные ошибки в определении расположения датчиков вдоль СВЧ тракта линии становятся значительными, что снижает точность калибровки многополюсного рефлектометра и измерения исследуемых параметров состояния управляемого объекта.
В связи с этим целью настоящей работы является повышение точности калибровки, а также удешевление конструкции СПИ на основе многополюсных рефлектометров за счет применения оптимальных статистических методов и алгоритмов цифровой обработки получаемой информации.
Для достижения поставленной цели необходимо решить следующие задачи.
1. Анализ существующих СПИ, основанных на многополюсных рефлектометрах, в условиях случайных внешних воздействий и выявление основных недостатков, препятствующих достижению высокой точности измерений.
2. Разработка методов и алгоритмов калибровки комбинированных многополюсных рефлектометров на основе полигауссовской аппроксимации априорной плотности вероятности вектора оцениваемых расстояний от плоскости подсоединения исследуемой СВЧ цепи до датчиков многозондовой измерительной линии.
3. Модернизация существующих автоматических СПИ на основе многополюсного рефлектометра использованием комбинированного многополюсника, что позволит значительно повысить их точность и технологичность, а также существенно упростить конструкции приборов.
4. Разработка новых алгоритмов оценки коэффициентов передачи комбинированного многополюсника и неизвестных характеристик исследуемого объекта управления на основе применения оптимальных методов определения параметров в различных технических приложениях.
5. Создание пакетов прикладных программ, реализующих разработанные методы и алгоритмы, и проведение имитационного моделирования для оценки эксплуатационных характеристик предлагаемых анализаторов.
Предметом исследования являются теоретические, методические и практические аспекты построения СПИ систем управления на базе комбинированных многополюсников, а также применение оптимальных статистических методов цифровой обработки информации, получаемой с их выходов.
Методы исследования. При решении поставленных задач в работе используется аппарат теорий вероятностей и оптимального оценивания, в частности, методы максимального правдоподобия и наименьших квадратов. Достоверность полученных научных положений и результатов доказана теоретическими выводами и подтверждена результатами модельных экспериментальных исследований.
Научная новизна работы заключается в следующем:
1. Разработан универсальный СПИ, основанный на многополюсном рефлектометре, отличающийся использованием в качестве преобразователя сигналов комбинированного многополюсника, что позволяет существенно повысить его точность и снизить себестоимость.
2. Разработан новый алгоритм калибровки комбинированного многополюсного рефлектометра, отличительной особенностью которого является уточнение расстояний от плоскости подсоединения измеряемого объекта до датчиков многозондовой линии и длины волны в тракте многополюсника на основе оценивания с использованием полигауссовской аппроксимации априорной плотности вероятности вектора неизвестных параметров, что позволило снизить основные систематические ошибки калибровки рефлектометра.
3. Построены оптимальные алгоритмы обработки данных с выходов многополюсника, позволяющие получать эффективные оценки определяемых параметров при его применении в различных технических приложениях: а) в системе построения разнесённых СВЧ изображений; б) в измерителе расстояния до плоской поверхности; в) в измерителе угла прихода радиолокационного сигнала; г) в доплеровском радаре измерения скорости объекта.
Практическая значимость полученных результатов заключается в том, что применение комбинированного многополюсника позволяет модернизировать известные конструкции СПИ, при этом существенно упрощается их изготовление и повышается точность измерения оптимизацией процедур измерения и калибровки. На основе предложенного метода повышения точности СПИ разработаны принципиально новые, которые могут быть откалиброваны по набору неизвестных нагрузок. Предложенные алгоритмы реализованы в виде программ математического обеспечения соответствующих преобразователей, которое может быть использовано при создании макетных образцов систем управления на их основе.
Реализация результатов. Полученные в работе теоретические результаты использовались при разработке алгоритмического и программного обеспечения для системы определения угла прихода телевизионного сигнала в Саратовском областном радиотелевизионном передающем центре и при разработке программного комплекса, предназначенного для проведения лабораторных работ и внедренного в учебный процесс на кафедре «Техническая кибернетика и информатика» Саратовского ГТУ, что подтверждено соответствующими актами.
Апробация работы. Основные результаты работы представлены и обсуждены на международных конференциях: «Математические методы в технике и технологиях» (Воронеж, 2006; Ярославль, 2007; Саратов 2008, 2010), «Радиотехника и связь» (Саратов, 2007), «Актуальные проблемы электронного приборостроения» (Саратов, 2008), «Проблемы управления, передачи и обработки информации» (Саратов, 2009), а также на научных семинарах факультета электронной техники и приборостроения СГТУ в г. Саратове.
Публикации. По теме диссертации опубликовано 18 работ, 3 из которых в журналах, рекомендованных ВАК.
Структура и объем работы. Диссертация состоит из введения, четырёх глав, заключения, списка использованной литературы, включающего 174 наименования, и приложения. Общий объем работы составляет 128 страниц, включая 26 рисунков и 8 таблиц.
СОДЕРЖАНИЕ РАБОТЫ
Во введении приведено обоснование актуальности темы диссертационной работы, а также обзор по главам диссертации и перечень основных положений, выносимых на защиту.
 В первой главе проведён критический анализ существующих СПИ и их математических моделей. Установлено, что метод многополюсного рефлектометра (МР) предложен в качестве альтернативы дорогостоящему методу векторного вольтметра, т. к. не требует большого объёма высокоточного оборудования. Однако основным недостатком при создании высокоточного СПИ на основе многополюсника являются большие систематические погрешности его калибровки.
В первой главе проведён критический анализ существующих СПИ и их математических моделей. Установлено, что метод многополюсного рефлектометра (МР) предложен в качестве альтернативы дорогостоящему методу векторного вольтметра, т. к. не требует большого объёма высокоточного оборудования. Однако основным недостатком при создании высокоточного СПИ на основе многополюсника являются большие систематические погрешности его калибровки.
Саратовские исследователи впервые предложили комбинированный многополюсный рефлектометр (КМР), структурная схема которого показана на рис. 1. Особенностью КМР является, что часть его датчиков представляют собой многозондовую измерительную линию (МИЛ) – СВЧ тракт регулярного поперечного сечения с измерительными портами, расположенными вдоль его продольной оси, причём данные выходы имеют слабую связь с полем внутри тракта и практически не нарушают картину стоячей волны, образуемой в МИЛ генератором и подсоединённой нагрузкой. Математические модели МР и МИЛ описываются системой уравнений:
![]() , rj = bj/ aj ,
, rj = bj/ aj , ![]() ,
,![]() , (1)
, (1)
 ,
, ![]() , (2)
, (2)
в которых ui – измеряемые уровни мощности на выходах детекторов, параметры Ai и Bi – комплексные коэффициенты передачи датчиков МР для прямой a и обратной b волн, ai – коэффициенты передачи датчиков МИЛ, aj, bj, rj и jj – комплексные амплитуды падающей и отраженной волн в тракте, модуль и фаза i-й подсоединённой калибровочной нагрузки, соответственно, а известными точно: di – расстояния от опорной плоскости АА до соответствующего датчика МИЛ и длина волны l. Для исследователя интерес представляют величина комплексного коэффициента отражения r = b/a исследуемого объекта.
Система уравнений (2) может быть разрешена относительно входящих в неё неизвестных, т. е. МИЛ может быть откалибрована по набору неизвестных нагрузок с одновременной их аттестацией. После её калибровки можно, зная параметры нагрузок, откалибровать и МР, решив (1) относительно Ai и Bi. Следовательно, КМР может калиброваться по набору неизвестных нагрузок, что существенно упрощает и удешевляет СПИ на его основе.
Однако КМР имеет систематические ошибки, связанные с неточным знанием расстояний до датчиков и длины волны в тракте МИЛ. Поэтому в главе сформулирована задача повышения точности калибровки КМР для его использования в качестве СВЧ-преобразователя на основе уточнения математических моделей комбинированных многополюсников на базе оценивания их параметров при использовании заданного преобразователя в различных технических приложениях, определяющих специфику конкретной модели рефлектометра. Это позволит устранить основной источник систематических погрешностей метода КМР и повысить точность измерения исследуемых физических величин.
Вторая глава посвящена описанию алгоритма оценивания неизвестных параметров нелинейной модели.
Предположим, что рассматриваемая система и её модель описываются аналогичными уравнениями вида
| (3) |
где Х – вектор входных сигналов модели, b – вектор неизвестных параметров модели, а n – вектор воздействия помех.
Критерием оценивания выбран минимум суммы квадратов отклонений наблюдаемых сигналов, реального объекта и его модели ![]() , где Ny –общее число измерений.
, где Ny –общее число измерений.
При таком выборе критерия оптимальной оценкой неизвестных параметров будет апостериорное среднее – результат усреднения плотности вероятности заданных параметров, полученной после обработки наблюдений.
Основная идея предложенного алгоритма заключается в аппроксимации априорной области изменения неизвестных параметров модели выпуклой комбинацией гауссовских кривых (рис. 2). Пусть компоненты вектора b имеют такое полигауссовское распределение в априорной области их изменения: ![]() , где wi – весовые коэффициенты, удовлетворяющие условию
, где wi – весовые коэффициенты, удовлетворяющие условию  , а
, а
|
 соответствует выражению для многомерной гауссовской кривой со средним значением βi и ковариационной матрицей оцениваемых параметров γi. Эта матрица представляет априорные знания об ошибках оценивания вектора b, если выбрать в качестве оптимальной оценки этого вектора значения βi, а M – размерность вектора b (число оцениваемых параметров модели). Предполагается, что используемые пики будут достаточно узкими, чтобы «основные массы» (по вероятности) кривых не пересекались между собой.
соответствует выражению для многомерной гауссовской кривой со средним значением βi и ковариационной матрицей оцениваемых параметров γi. Эта матрица представляет априорные знания об ошибках оценивания вектора b, если выбрать в качестве оптимальной оценки этого вектора значения βi, а M – размерность вектора b (число оцениваемых параметров модели). Предполагается, что используемые пики будут достаточно узкими, чтобы «основные массы» (по вероятности) кривых не пересекались между собой.
В работе показано, что апостериорная плотность вероятности, которую необходимо вычислить для решения задачи, также будет иметь вид совокупности гауссовских кривых. Однако параметры этой совокупности будут другими:
 ,
,
где ![]() ,
,  ,
, 
 ,
, .
.
В последних выражениях Wi обозначает матрицу априорных ошибок измерения, а символ ![]() над параметрами ─ их апостериорные значения. Таким образом, можно вычислить апостериорное математическое ожидание вектора параметров b (оптимальную в среднеквадратическом смысле оценку):
над параметрами ─ их апостериорные значения. Таким образом, можно вычислить апостериорное математическое ожидание вектора параметров b (оптимальную в среднеквадратическом смысле оценку):

и апостериорную ковариационную матрицу ошибок оценивания
 .
.
Структурная схема, поясняющая работу алгоритма, приведена на рис. 3. Этот алгоритм позволил уточнить значения неизвестных параметров di и λ в модели КМР. Использование традиционных методов калибровки в совокупности с данным алгоритмом позволяет создать универсальный СПИ на основе КМР для различных технических приложений.
Для иллюстрации работы этого алгоритма приведен пример построения разнесенных СВЧ изображений проводящих объектов. Особенность изображений состоит в том, что при их получении используется несколько разнесенных в пространстве приемников сигнала, которые получают фазовую картину отраженных от объекта сигналов с разных ракурсов. После чего эти данные объединяются для построения изображения объекта. Задача возникла в связи с появлением перспективного метода идентификации радиолокационных объектов не только по физическим параметрам движения (скорости, высоте полета, маневру), но и по форме аппарата, определяемой радиолокационным «изображением».
Предположим, что облучающая объект плоская монохроматическая волна распространяется в направлении ik, тогда поле рассеяния этого объекта, нормированное по дальности, в оптическом приближении выражается так:
| (4) |
где ![]() ,
,  , n – вектор внешней нормали к поверхности объекта S(r), а поверхностный интеграл берется по облучаемой части объекта. Складывая
, n – вектор внешней нормали к поверхности объекта S(r), а поверхностный интеграл берется по облучаемой части объекта. Складывая ![]() и
и ![]() , измеренное с обратной стороны объекта и используя теорему Остроградского-Гаусса, можно получить следующее выражение:
, измеренное с обратной стороны объекта и используя теорему Остроградского-Гаусса, можно получить следующее выражение:
| (5) |

где ![]() – характеристическая функция объекта B, которая равна 1, если r находится в области B, и 0 в противном случае. Уравнение (5) называется тождеством Боярского и показывает, что рассеивающий объект B может быть восстановлен по его полю рассеяния, измеренному под всеми углами наблюдения и на всех частотах, на основе обратного преобразования Фурье.
– характеристическая функция объекта B, которая равна 1, если r находится в области B, и 0 в противном случае. Уравнение (5) называется тождеством Боярского и показывает, что рассеивающий объект B может быть восстановлен по его полю рассеяния, измеренному под всеми углами наблюдения и на всех частотах, на основе обратного преобразования Фурье.
Предложенная схема установки, применяемой для снятия угловых и частотных характеристик на основе ДПР, приведена на рис. 4а. На рис. 4б приведена измерительная часть этой схемы на основе КМР. Для моделирования открытого пространства в малом объеме в установке использована безэховая камера, которая обеспечивает облучение района установочного стола плоской электромагнитной волной и при этом исключает отражение от стенок. Передатчик и приёмник располагаются рядом друг с другом на расстоянии около 15 см, что согласуется с предположением обратного рассеяния. Основной и побочный отражатели имеют диаметры около 2 и 0,9 м. Частота изменяется в пределах 8 – 12 ГГц.
Достоинства схемы СПИ на основе КМР: расширяется диапазон рабочих частот исключением векторного анализатора, который имеет ограничения по этому параметру, а также из схемы исключается дорогостоящий блок – векторный вольтметр. При моделировании применяем стандартное уравнение плоской монохроматической волны ![]() , а для принимаемого сигнала используем согласно соотношению (4).
, а для принимаемого сигнала используем согласно соотношению (4).
Далее проводится калибровка КМР. Для этого на первом этапе с использованием отношения (5) получаются значения сигналов, которые будут соответствовать полю рассеяния калибровочного объекта (металлического цилиндра) на разных частотах и далее применяются для калибровки МИЛ-части КМР. При этом оцениваются эквивалентные значения «комплексных коэффициентов отражения» всей камеры с установленным в ней калибровочным объектом. Затем, используя модель МИЛ (2), и алгоритм, описанный выше, уточняются расстояния до датчиков МИЛ. Ключевым моментом является то, что при получении измеряемых данных используются «истинные» значения неизвестных на практике параметров, подставляя их в (5) и (2), а при калибровке истинные значения параметров считаются неизвестными и подлежат оцениванию.
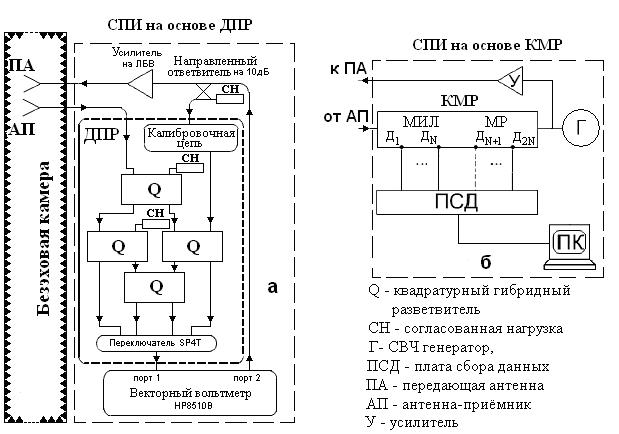
Рис. 4. Схема установки для построения разнесенных изображений
а) с измерительной частью на основе ДПР; б) на основе КМР
После получения уточненных значений расстояния, а также ККО исследуемого объекта, переходят к калибровке второй части КМР, которая соответствует обычному МР, используя уравнение (1).
Проведено моделирование двух типов объектов: металлический цилиндр и четыре расположенных в разных точках линейных отражателя. Угол обзора при исследовании цилиндра изменяется в пределах от 0 до 360° для 60 различных положений. Для линейных отражателей угол менялся в пределах от 0 до 90° для 50 различных положений.
На рис. 5 приводятся параметры объектов, данные, измеренные в частотной области и восстановленные изображения. Видно, что в случае использования КМР, изображения получаются более четкими. Полученные результаты показывают, что алгоритм может быть успешно применен как при оценивании линейных и нелинейных моделей, так и моделей смешанного типа.
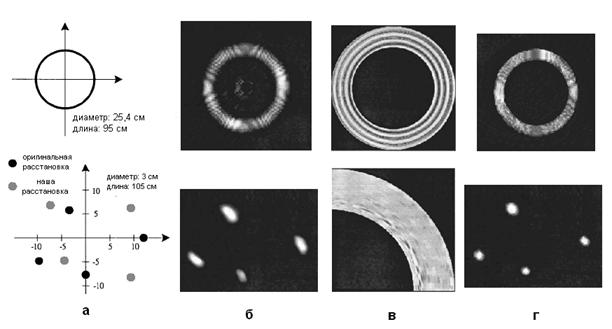
Рис. 5. Сравнение результатов моделирования: а) параметры объектов; б) восстановленные изображения в схеме без КМР; в) данные из частотной области, полученные при моделировании схемы на основе КМР; г) изображения, восстановленные по частотным данным, полученные с использованием схемы на основе КМР
В третьей главе описан СПИ, используемый в качестве измерителя расстояния до плоской поверхности, в основе которого применяется КМР. Задача возникла из-за существенных изменений в технологии изготовления листового металла. Традиционный прокатный стан горячей прокатки заменяется системой пленочного литья, что может обеспечить более высокую точность и стабильность толщины получаемого листа, и значительную экономию энергии. Поэтому при внедрении этой технологии возникла необходимость в разработке системы управления этим процессом, в частности, прецизионного устройства для измерения уровня жидкой стали, удовлетворяющего следующим требованиям: субмиллиметровое разрешение на расстоянии порядка полуметра, надежность и повторяемость измерений, нечувствительность к изменениям температуры и влажности. Этим требованиям удовлетворяет датчик, работающий в СВЧ диапазоне.
Блок-схема разработанной установки показана на рис. 6. В качестве СПИ используется МР, математическая модель которого может быть представлена в виде:
| (6) |
где i – номер датчика (i = ![]() ), k – номер измерения (k =
), k – номер измерения (k = ![]() ). В отличие от модели (1) здесь добавлен аддитивный шум xik.
). В отличие от модели (1) здесь добавлен аддитивный шум xik.
При решении (6) относительно фаз коэффициента отражения исследуемой поверхности jk = arg{bk/ak}= ![]() , k =
, k = ![]() , где l – длина волны генератора; dk – расстояние между поверхностью и рупором в k-ом измерении, определяем оценки всех jk, затем ― закон изменения координаты dk исследуемой поверхности во времени.
, где l – длина волны генератора; dk – расстояние между поверхностью и рупором в k-ом измерении, определяем оценки всех jk, затем ― закон изменения координаты dk исследуемой поверхности во времени.
В работе показано, что модель (6) может быть приведена к следующему виду
| (7) |
 k =
k = 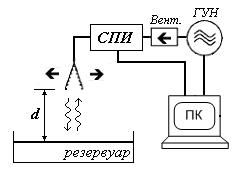 где h1k, h2k - компоненты соответствующих собственных векторов v1 и v2 матрицы UTU, получаемой из матрицы измерений U = ||unk||, соответствующие двум ее максимальным собственным числам; a11, a12, a21, a22 - неизвестные коэффициенты разложения.
где h1k, h2k - компоненты соответствующих собственных векторов v1 и v2 матрицы UTU, получаемой из матрицы измерений U = ||unk||, соответствующие двум ее максимальным собственным числам; a11, a12, a21, a22 - неизвестные коэффициенты разложения.
Рис. 6. Структурная схема нового датчика положения, состоящего из входного каскада радиолокатора и системы сбора и обработки данных. ГУН – генератор, управляемый напряжением, d – расстояние до исследуемой поверхности, ПК – персональный компьютер, СПИ – СВЧ-преобразователь информации, на основе КМР, Вент. – вентиль.
Для оценивания коэффициентов aij используется модификация традиционного метода калибровки, основанного на разложении матрицы измерений по сингулярным числам. Этот статистический метод, основан на априорном предположении о знании закона распределения фаз jk вибрирующей поверхности при большом K³10000. Вначале этим коэффициентам присваиваются произвольные значения (например, a11 = a22 = 1 и a12 = a21 = 0), из (7) находятся оценки фаз, и формируется их гистограмма, характеризующая распределение фаз. Далее, это распределение сравнивается с известным, предполагаемым а-приори. На основе этого вычисляются поправочные множители, корректирующие величины a11, a12, a21, a22, а затем окончательно определяются оценки фаз и закон изменения координаты поверхности во времени. Таким образом, предлагаемый измеритель автоматически калибруется при каждом измерении, что обеспечивает существенные преимущества по сравнению с известными бесконтактными СВЧ измерителями координат.
Для повышения точности измерений предложена методика уточнения длины волны l генератора, т. к. точность измерения координат dk непосредственно зависит от этого параметра. Идея метода заключается в использовании разработанного в главе 2 алгоритма полигауссовской аппроксимации априорной плотности вероятности вектора оцениваемых параметров. Подробно методика описана в главе 3 (раздел 3.3) диссертации. При этом предполагается, что в течение периода уточнения в 20 мс частота генератора остается постоянной.
Метрологические характеристики разработанного бесконтактного измерителя координат, применяемого для измерения уровня жидкой стали в резервуаре, проверены имитационным моделированием на основе разработанного комплекса программ. В начале задавался закон изменения положения тестируемой поверхности, который преобразовывался в закон изменения фазы коэффициента отражения сигнала от рассматриваемой поверхности, а далее – в напряжения на выходе датчиков МР. После этого к полученным значениям напряжений добавлялся аддитивный шум. По зашумлённым дискретным сигналам с датчиков рефлектометра проводилось оценивание закона изменения координаты поверхности. Сравнивались два метода измерения: предложенный и известный из работы коллектива авторов под руководством А. Штельцера. Типичные результаты показаны на рис. 7, из которого видно, что использование оптимальных статистических методов обработки сигналов с датчиков МР позволило примерно на порядок повысить точность измерения без применения дорогостоящего оборудования (прецизионного частотомера и набора калибровочных нагрузок для МР).
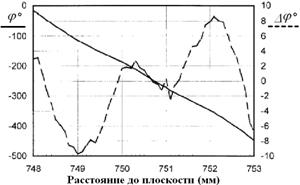
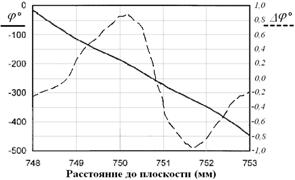
Рис. 7. Фаза j и ошибка фазы Dj коэффициента отражения как функция расстояния до исследуемой поверхности. 1° соответствует 0,012 мм. Сплошная линия: измеренная фаза, штрихованная – погрешность измерения фазы. Левый график – результаты оценивания методом А. Штельцера, правый – предлагаемым методом
Таким образом, проведённое численное моделирование показало высокую эффективность предлагаемого измерителя, что позволяет рекомендовать его к применению при внедрении системы управления процессом получения листового металла.
В четвёртой главе описан методы применения КМР в радиолокационных системах. СПИ на основе КМР используется в качестве волнового коррелятора, то есть, для измерения соотношения двух сигналов, подаваемых на его входные порты (рис. 8). Разработан алгоритм калибровки многополюсника, используемого в качестве волнового коррелятора.
Калибровка КМР осуществляется по подвижному фазовращателю, коэффициент отражения которого известен с погрешностью. Для этого используется процедура, аналогичная ранее описанной. Вначале подвижный фазовращатель устанавливается последовательно в М положений, и для каждого из них измеряются все сигналы с датчиков КМР. Затем производится калибровка МИЛ-части КМР с одновременным определением комплексных соотношений между двумя сигналами, поступающими на входы КМР 
 . Существенно, что модули этих соотношений не предполагаются постоянными в течение процесса калибровки, что позволяет исключить возникающие систематические погрешности. Далее калибруется вторая часть КМР по известным значениям Wj. В этом случае модифицируется процедура уточнения расстояний до датчиков МИЛ, при этом её идея основана на алгоритме оценивания из главы 2.
. Существенно, что модули этих соотношений не предполагаются постоянными в течение процесса калибровки, что позволяет исключить возникающие систематические погрешности. Далее калибруется вторая часть КМР по известным значениям Wj. В этом случае модифицируется процедура уточнения расстояний до датчиков МИЛ, при этом её идея основана на алгоритме оценивания из главы 2.
Далее кратко опишем методику применения волнового коррелятора на основе КМР.
В приложении КМР к определению угла прихода сигнала (рис. 8) в системе управления передающей антенной, она медленно изменяет положение в «вертикальной» плоскости, совершая 500 дискретных смещений на расстоянии в 1 метр. Её сигнал принимается двумя неподвижными приемными антеннами, разнесенными друг относительно друга на расстояние L = 0,24 метра. Получено выражение для угла прихода сигнала в антенную систему при условии приёма в дальнем радиусе передающей антенны d > 2R2f/c (с – скорость света, а значения остальных параметров приведены на рис. 8):
 ,
,
где W – комплексное отношение сигналов, полученных двумя приемниками.
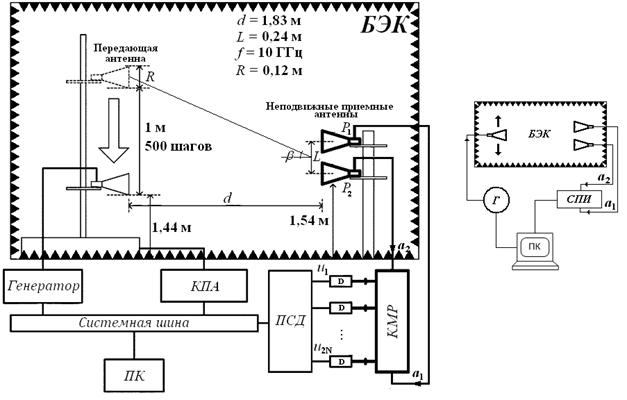
Рис. 8. Блок-схема экспериментальной установки для измерения углового положения излучающего объекта. Слева: БЭК – безэховая камера, КПА – контроллер подъемника антенны, МР – многополюсный рефлектометр, ПСД – плата сбора данных, D – СВЧ детекторы (HP85025D). Справа – упрощенная схема: Г – генератор, СПИ – СВЧ-преобразователь информации.
 В качестве иллюстрации преимуществ метода КМР по сравнению с ДПР приводятся результаты моделирования. На рис. 9 представлены зависимости относительной погрешности измерения разности фаз у методов с ДПР и КМР от числа положений фазовращателя, используемых при калибровке, которые показывают, что метод КМР существенно меньше зависит от систематических ошибок калибровки.
В качестве иллюстрации преимуществ метода КМР по сравнению с ДПР приводятся результаты моделирования. На рис. 9 представлены зависимости относительной погрешности измерения разности фаз у методов с ДПР и КМР от числа положений фазовращателя, используемых при калибровке, которые показывают, что метод КМР существенно меньше зависит от систематических ошибок калибровки.
Вторым приложением волнового коррелятора является доплеровский радар для измерения скорости объектов. Его схема на основе ДПР приведена на рис. 10, а предлагаемая в работе отличается от приведённой заменой ДПР на КМР и скалярного анализатора цепей на плату сбора данных, что существенно упрощает конструкцию измерителя в целом. Вычисление скорости объекта производится по формуле ![]() .
.
 Моделирование показывает, что при измерении достаточно больших скоростей (порядка десятков м/с) методы КМР и ДПР имеют сравнимые по точности результаты. Однако для малых скоростей (~ 1 мм/с и менее) это соотношение существенно изменяется. На рис. 11 приводятся результаты измерения разности фаз между принятым и зондирующим сигналами методом ДПР для значений скорости 0,2; 0,5 и 1,0 мм/с. Частота сигнала составляет 10 ГГц и известна с погрешностью 1%. Схема на основе ДПР весьма чувствительна к отклонениям частоты генератора от её основного значения.
Моделирование показывает, что при измерении достаточно больших скоростей (порядка десятков м/с) методы КМР и ДПР имеют сравнимые по точности результаты. Однако для малых скоростей (~ 1 мм/с и менее) это соотношение существенно изменяется. На рис. 11 приводятся результаты измерения разности фаз между принятым и зондирующим сигналами методом ДПР для значений скорости 0,2; 0,5 и 1,0 мм/с. Частота сигнала составляет 10 ГГц и известна с погрешностью 1%. Схема на основе ДПР весьма чувствительна к отклонениям частоты генератора от её основного значения.
Для снижения влияния погрешностей частоты в методе КМР производится её периодическое уточнение способом, изложенным в главе 3 диссертации. Аналогичные результаты для схемы с КМР показаны на рис. 12. Видно, что точность единичных измерений скорости в схеме с КМР существенно выше, чем в схеме с ДПР, т. о. уменьшаем ошибки, повышаем точность и быстродействие радара в несколько раз, что обеспечивает значительные преимущества при его использовании в системах управления.
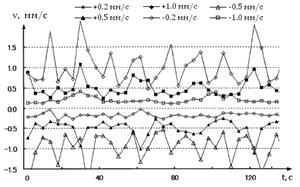
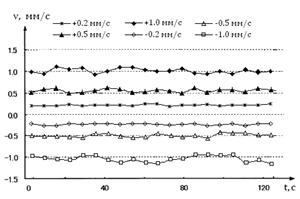
Рис. 11. Измеренные ДПР единичные значения скорости объекта на частоте 10 ГГц | Рис. 12. Измеренные КМР единичные значения скорости объекта на частоте 10 ГГц |
В заключении подведены итоги проведенного исследования, сформулированы основные выводы и обобщены рекомендации по повышению точности СПИ на основе КМР, а также упрощение их конструкций на основе алгоритмов более точной их калибровки и применения оптимальных статистических методов обработки измерительной информации.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ ДИССЕРТАЦИОННОЙ РАБОТЫ
1. Обоснована актуальность применения комбинированных многополюсных рефлектометров в качестве СПИ для систем управления в различных приложениях. Создан универсальный СПИ, который основан на многополюсном рефлектометре и использует его в качестве преобразователя сигналов. Это позволило существенно повысить точность измерения, а также снизить себестоимость измерителей, сконструированных на его основе.
2. Предложен новый алгоритм оценивания, на основе которого производится уточнение расстояний от плоскости подсоединения исследуемой СВЧ цепи до датчиков многозондовой измерительной линии.
3. Разработан новый алгоритм калибровки комбинированного многополюсного рефлектометра, использующий уточнение расстояний от плоскости подсоединения измеряемого объекта до датчиков многозондовой измерительной линии, а также уточнение длины волны сигнала в тракте. Вычисление производится в результате оценивания на основе полигауссовской аппроксимации априорной плотности вероятности вектора неизвестных параметров. Это позволило снизить основные систематические ошибки калибровки рефлектометра.
4. Построены оптимальные алгоритмы обработки данных с выходов многополюсника, которые позволили получить эффективные оценки вычисляемых параметров при его применении в различных технических приложениях: а) системе построения разнесённых СВЧ изображений; б) измерителе расстояния до плоской поверхности; в) измерителе угла прихода радиолокационного сигнала; г) доплеровском радаре измерения скорости объекта.
5. Создан комплекс программ для независимого оценивания параметров модели, измерения с использованием комбинированного многополюсного рефлектометра и его калибровки, а также для моделирования работы указанных измерителей.
Публикации по теме диссертации
В изданиях, рекомендованных перечнем ВАК РФ
1. Львов комбинированного многополюсного рефлектометра в доплеровском радаре и системе разнесенного СВЧ-изображения / , // Системы управления и информационные технологии, 3(37), 2009, С. 72 - 76.
2. Львов коэффициента отражения генератора методом двенадцатиполюсного рефлектометра / , // Вестник Саратовского государственного технического университета, №4(43) выпуск 2, 2009, С. 68 - 72.
3. Львов многополюсных рефлектометров специального вида для решения ряда прикладных задач / // Вестник Саратовского государственного технического университета, №2(45) выпуск 1, 2010, С. 181 - 193.
Публикации в других изданиях
4. Львов комбинированного многополюсника для измерения сверхмалых скоростей / , // Сб. трудов Междун. научн. конф. «ММТТ-19», Воронеж, 2006, Т. 8, С. 128 - 131.
5. Львов метод решения нелинейных уравнений многополюсных рефлектометров и его применение для измерения расстояния до поверхности / // Сборник докладов Академии военных наук. Серия «Аналитическая механика. Аналитическая теория автоматического управления». АВН. Поволжское отделение, 2007, №1, С. 58 - 71.
6. Львов измеритель координат на основе многополюсного рефлектометра / , // Сб. трудов Междун. научн. конф. «ММТТ-20», Ярославль, 2007, Т. 7, С. 56 - 59.
7. Львов влажности газа дифференциальным методом / , // Сб. трудов Междун. научн. конф. «ММТТ-20», Ростов-на-Дону, 2007, Т. 10, С. 282 - 284.
8. Львов параметров аддитивной смеси гармонических сигналов с неизвестными частотами / , , // Материалы IV Междун. научн.-техн. конф. «Радиотехника и связь», Саратов, 2007, С. 246 - 252.
9. Львов метод измерения влажности газа / , // Материалы IV Междун. научн.-техн. конф. «Радиотехника и связь», Саратов, 2007, С. 253 - 259.
10. Львов комбинированного многополюсного рефлектометра по подвижной согласованной нагрузке / , // Сб. трудов Междун. научн. конф. «ММТТ-21», Саратов, 2008, Т. 8, С. 111 - 115.
11. Львов портативного СВЧ-измерителя соотношения вода/цемент в строительных растворах / // Сб. трудов Междун. научн. конф. «ММТТ-21», Саратов, 2008, Т. 8, С. 109 – 111.
12. Lvov P. A. Applications of combined multiport reflectometer to diversity imaging / P. A. Lvov // Proceedings of International Conference APEDE, Saratov, 2008, P. 514 - 519.
13. Lvov P. A. Usage of multiport reflectometer in the construction of Doppler radar systems for measuring very low velocities / P. A. Lvov // Proceedings of International Conference APEDE, Saratov, 2008, P. 519 - 523.
14. Об одном методе решения задачи идентификации / // Сб. трудов междун. научн. конф. «Проблемы управления, передачи и обработки информации», СГТУ, 2009, С. 83 - 85.
15. Львов аппроксимация области изменения параметров модели для решения задачи идентификации / , // Сб. трудов междун. научн. конф. «Проблемы управления, передачи и обработки информации», СГТУ, 2009, С. 85 - 89.
16. Львов анализатор цепей на основе двенадцатиполюсного рефлектометра / , // Сб. трудов междун. научн. конф. «Проблемы управления, передачи и обработки информации», СГТУ, 2009, С. 193 - 195.
17. Львов комбинированного многополюсного рефлектометра в качестве волнового коррелятора / , // Сб. трудов междун. научн. конф. «Проблемы управления, передачи и обработки информации», СГТУ, 2009, С. 195 - 198.
18. Львов комбинированного многополюсного рефлектометра для измерения влажности цемента / , // Сб. трудов Междун. научн. конф. «ММТТ-23», Саратов,2010, Т. 7, С. 110 - 113.
РАЗРАБОТКА МЕТОДОВ, АЛГОРИТМОВ И ПРОГРАММ ДЛЯ СВЧ-ПРЕОБРАЗОВАТЕЛЕЙ ИНФОРМАЦИИ В СИСТЕМАХ УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ ОБЪЕКТАМИ
Автореферат
Корректор
Лицензия ИД № 000 от 14.11.01.
Подписано в печать __.__.__. Формат 60 х 84 1/16
Бум. тип. Усл.-печ. л. 1,0 Уч.-изд. л. 1,0
Тираж 100 экз. Заказ ____ Бесплатно
Саратовский государственный технический университет
410054 7
Отпечатано в РИЦ СГТУ, 410054 7
