


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Блок сервисных программ предназначен для редактирования файлов данных, оптимизации схемы объекта, преобразования координат в другие системы по заданным параметрам связи и документирования промежуточных и окончательных результатов.
Комплекс программ позволяет обрабатывать результаты измерений, выполненные с помощью GPS, осуществлять предполевое планирование процесса измерений, выбирать установочные параметры, составлять расписание сеансов измерений.
Комплекс программ позволяет обрабатывать данные, полученные с помощью аппаратуры других фирм-изготовителей и введенных в формате обмена RINEX.
Комплекс программ является программным обеспечением для обработки большого числа базисных линий, которые измерены в различных режимах работы. При этом не имеет значения, включает ли объект данные, полученные в статическом, кинематическом режимах или в режиме "стою-иду". Программное обеспечение учитывает это автоматически.
Основными блоками программы на этапе окончательной обработки являются:
- "Просмотр/Редактирование";
- "Уравнивание";
- "Преобразование координат";
- "Сервисные программы".
Данные выбранного объекта можно просматривать и редактировать в графическом и цифровом виде в блоке "Просмотр/Редактирование". Информацию, относящуюся к точкам, такую как идентификатор точки, атрибуты, смещение антенны, координаты и т. д. можно просматривать и редактировать в любое время. Использование фильтров позволит выводить на экран только те точки, которые удовлетворяют определенным критериям.
Блок "Уравнивание" обеспечивает пользователя полезным средством для выполнения уравнивания векторов базисных линий по методу наименьших квадратов в системе WGS-84.
Данные могут импортироваться непосредственно из любого объекта или же импорт данных может быть осуществлен из подходящего по формату ASCII файла.
Может выполняться свободное или несвободное уравнивание. Реализуется графический интерфейс подобный графическому интерфейсу блока "Просмотр/Редактирование".
Для получения результатов в системе координат пользователя, необходимо провести преобразования координат из одной системы в другую. Для этой цели предоставляется несколько возможностей:
1) создавать библиотеки наборов координат, эллипсоидов, параметров трансформации и наборов проекций;
2) определять различные типы параметров трансформации;
3) осуществлять различные типы трансформаций;
4) использовать картографические проекции;
5) объединять программы вычисления картографических проекций, определенных пользователем.
Блок "Сервисные программы" содержит, как правило, загрузочные модули для нового программного обеспечения приемника.
Процесс обработки данных (Baselines Processing) состоит из трех основных этапов.
Первый этап заключается в выборе данных и параметров вычислений. Большинство решаемых в этой части задач поддерживается графическими средствами.
На втором этапе происходят непосредственно вычисления, выполняемые автоматически, и не требующие никакого вмешательства оператора. На последнем этапе представляются результаты для последующего анализа и хранения в базе данных.
Выбор данных включает в себя выбор объекта; выбор рабочей временной зоны; выбор пунктов, участвующих в обработке; выбор опорной станции; задание начальных координат опорной станции; определение мобильных станций; выбор интервалов времени для полевых данных, включаемых в обработку.
Выбор параметров вычислений включает в себя корректировку угла отсечки; выбор тропосферной модели; выбор ионосферной модели; выбор варианта использования эфемерид; выбор используемых данных (код, фаза); выбор комбинации частот; выбор максимальной длины вычисляемой линии; корректировка априорного значения средней квадратической ошибки.
3. Кинематический режим измерений и обработки в реальном времени
3.1. Кинематический режим измерений и обработки в реальном времени при выполнении геодезических работ
Кинематический режим измерений и обработки в реальном времени (Kinematic GPS - RTK GPS) при времени измерений на одном пункте до 5 с позволяет выполнять обработку в реальном масштабе времени (on line), т. е. одновременно с выполнением измерений. Основное применение кинематического режима измерений и обработки в реальном времени (Real-Time Kinematic GPS - RTK GPS) — это плановая и высотная съемка открытой территории, создание локальных сетей сгущения на небольших удаленных объектах, вынос в натуру проектов.
Сравнительные данные по производительности приведены в табл. 1.
Таблица 1
Вид работ | RTKGPS | Тахеометрия | Нивелирование | Обработка |
Плановая съемка | 220% | 100% | - | 0.5ч |
Планово - высотная съемка | 240% | 100% | - | 0.5ч |
Высотная съемка | 240% | - | 100% | 0.3ч |
Создание сетей сгущения | 300% | 100% | - | 1.5ч |
Вынос проекта в натуру | 325 % | 100% | _ | _ |
Наиболее важным преимуществом кинематического режима измерений и обработки в реальном времени (Real-Time Kinematic GPS - RTK GPS) является полное отсутствие необходимости повторного выезда на объект для исправления выявленных в процессе обработки недостатков, так как обработка и контроль качества выполняются непосредственно в процессе измерений.
3.2. Кинематический режим измерений и обработки в реальном времени при выполнении топографических работ
Не всегда повышение производительности от использования спутниковых приемников оправдывает высокую стоимость технических средств и программного обеспечения. Поэтому использование на конкретных видах работ тех или иных моделей спутниковых приемников необходимо увязывать с требуемой точностью получения координат. Так, например, точность определения координат для навигации судов и самолетов, для плановой привязки спутниковых снимков среднего разрешения, для координирования отдельных объектов при обновлении карт мелких масштабов 1:50 :1 лежит в пределах 5 -100 м. При использовании навигационного режима измерений и обработки точность порядка 10-15 м может быть получена в реальном масштабе времени, а более высокая, порядка 1 м, при последующей камеральной обработке. При этом не требуется применять дорогостоящие фазовые геодезические приемники, а достаточно использовать более дешевые приемники и соответствующее программное обеспечение. Недорогие кодовые спутниковые приемники многих фирм в последнее время получили встроенную функцию дифференциальных определений в реальном масштабе времени (DGPS).
3.3. Кинематический режим измерений и обработки в реальном времени при выполнении диспетчерских работ
Одним из наиболее значимых и перспективных направлений практического применения спутниковых навигационных систем является автоматическое местоопределение подвижных объектов (automatic vehicle location, AVL), активно развивающееся в настоящее время. Многие фирмы-производители связной и навигационной аппаратуры потребителя (GPS-приемников) также изготавливают и поставляют оборудование, размещаемое на подвижных объектах и выполняющее функции бортовых контроллеров с определением собственных координат, скорости, курса, с интерфейсом внешних датчиков и исполнительных устройств и предназначенное для объединения в комплекс транспортной навигации. Как правило, подобный комплекс состоит из базовой станции и групп подвижных объектов, взаимодействующих при помощи радиоканала.
Одним из первых вариантов диспетчерской информационней системы является система ПРИН ДИС, представленная фирмой АО "ПРИН", которая предлагает на российском рынке спутниковые навигационные системы TRIMBLE. Уже в этой первой системе были реализованы все основные функции автоматизированной диспетчерской системы. ПРИН ДИС позволяет определять координаты подвижных объектов и отображать их на электронной карте местности, выведенной на экран компьютера. В состав системы входят персональный компьютер, программное обеспечение, аппаратура связи и спутниковые приемники. Положение каждого подвижного объекта в режиме реального времени отображается на экране специальным значком. Каждому объекту присваивается имя, которое индицируется рядом со значком. На экран можно также вывести курс и скорость движения объектов.
Программное обеспечение работает в среде Windows, что позволяет оператору ПРИН ДИС использовать преимущества многозадачного и многооконного режимов и видеть одновременно несколько районов электронной карты в разных окнах. В каждом окне можно задать свой масштаб отображения и отслеживать движение группы объектов, при этом масштаб изображения и границы участка электронной карты автоматически меняются таким образом, чтобы все объекты заданной группы оказались в поле зрения. Прием данных от спутниковых приемников осуществляется в специальном формате "TAIP -протокол".
4 Кинематический режим измерений и обработки в реальном времени для персональных навигационных систем и для навигационных систем транспортных средств
4.1. Кинематический режим измерений и обработки в реальном времени для персональных навигационных систем
При навигационных измерениях в автономном режиме приемник используется без базовой станции, при этом точность единичных определений местоположения составляет 15-100 м в зависимости от скорости движения, наличия или отсутствия режима ограниченного доступа. Простейшие модели персональных спутниковых приемников предоставляют возможность получения текущих координат с указанной выше точностью в системе координат WGS-84 и скорости движения. Более сложные модели позволяют определить кроме того направление движения и отобразить на жидкокристаллическом дисплее ряд сервисных функций, например уклонение от заданного маршрута, расстояние до заданной точки, а также графически отобразить маршрут движения в пределах окна встроенного дисплея.
При навигационных измерениях в режиме с дифференциальной коррекцией (в режиме кодовых измерений) точность единичных определений возрастает до 1 -2 м на расстоянии до 500 км от базовой станции. При этом возможны следующие режимы работы:
- режим определения местоположения подвижной станции в реальном времени (рис. 1);

Рис. 1. Автономный режим определения местоположения подвижной станции в
реальном времени
- режим слежения за местоположением подвижной станции в реальном времени (рис. 2);
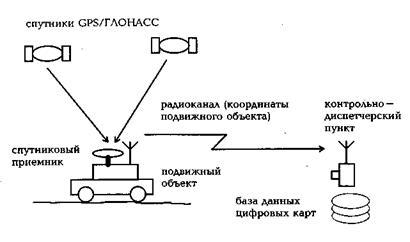
Рис. 2. Автономный режим слежения за местоположением подвижной станции в реальном времени
- комбинированный режим, при котором точное положение подвижной станции определяется и в точке нахождения подвижной станции и на диспетчерском пункте (в месте нахождения базовой станции).
К приемникам такого типа относятся GeoExplorer, ScoutMaster фирмы TrimbleNavigation, GARMIN-38, 40, 45 и другие модели фирмы GARMIN INTERNATIONAL INC и др.
4.1.2. Глобальные и локальные системы контроля и управления транспортом
Воздушные, морские и наземные транспортные перевозки играют важную роль в экономическом развитии всех без исключения стран и отраслей. По транспортным путям в возрастающих объемах круглосуточно в разных направлениях перемещаются огромные массы грузов и большое количество пассажиров. Российские транспортные магистрали, обладающие большой протяженностью и не всегда хорошим качеством, не являются исключением из этого общего правила.
В условиях увеличения грузооборота, криминализации обстановки на дорогах и акваториях, развития системы страхования, усиления конкуренции, необходимости повышения дисциплины и безопасности вопрос эффективного управления и контроля транспортными средствами на сложных разветвленных маршрутах или на дальних расстояниях становится наиболее актуальным. В настоящее время жесткой конкуренции трудно найти руководителя организации, использующей транспорт, который не стремился бы снизить накладные расходы, повысить эффективность работы диспетчеров, водителей, капитанов, машинистов, улучшить контроль за состоянием подвижного состава.
Кроме того, особого внимания требует транспортировка грузов, обладающих особыми свойствами (токсичные и радиоактивные отходы, взрывчатые и отравляющие вещества, негабаритные грузы, деньги и драгметаллы, оружие и др.).
Кроме задач глобальной навигации международных (или междугородных) перевозок существуют не менее важные задачи локальной навигации для постоянного автоматического определения местонахождения объекта, направления и скорости его движения и отображения информации на электронной карте.
К таким локальным задачам относятся контроль за местоположением специальных транспортных средств службы инкассации, милиции, ГАИ, такси, аварийных служб; сигнализация угона и отслеживание пути угнанного автомобиля; контроль за перевозкой грузов; контроль за местонахождением судов в условиях прибрежного плавания.
Поскольку определение координат с использованием спутниковых приемников решается одинаково и в случае глобальной навигации и при решении локальных задач, то основными отличиями глобальных и локальных систем будут дальность действия каналов связи и наличие картографической основы на необходимую территорию.
4.1.3. Глобальные системы контроля и управления транспортом
Одним из вариантов глобальной системы контроля и управления транспортом является система Galaxy, предложенная фирмой АО "ПРИН".
Концепция слежения за транспортом и контроля перевозок подразумевает оперативное получение диспетчерской службой объективной информации о координатах, скорости и направлении движения транспорта, а также отслеживание данных о состоянии машины и груза (вскрытие контейнера, удар, опрокидывание, вес, температура рефрижератора и т. п.). Необходимо также обеспечить информационное взаимодействие между экипажем и диспетчерским центром, включая обмен свободным текстом, стандартными и экстренными сообщениями ("нападение","остановлен ГАИ", "авария, есть жертвы" и др.). Решая задачу снижения накладных расходов на эксплуатацию и поддержание системы слежения в работоспособном состоянии, ведущие отечественные, зарубежные и совместные компании пошли по "космическому пути", т. е. используют спутниковую навигацию и космическую связь. "Космический путь" обеспечивает непрерывность, глобальность, надежность связи и контроля в любой точке Земного шара.
В качестве спутниковой радионавигационной системы предлагается использовать систему GPS, позволяющую подвижным объектам на земле и воде путем приема обработки сигналов от нескольких навигационных спутников определять свои координаты (широту, долготу и высоту), направление и скорость движения, направление на очередную точку маршрута, пройденное и оставшееся расстояние до промежуточной или конечной точки маршрута, другие характеристики. Достоинством GPS является непрерывность передачи информации, всепогодность и скрытность потребителя.
Бортовой комплект оборудования обеспечивает следующие основные функции:
- отправка сообщений в центр, в том числе отчета о местоположении и состоянии датчиков;
- получение сообщений из центра;
- печать сообщений на принтере внутри транспортного средства;
- прием и отправка форм и макросообщений;
- отображение служебной информации;
- экстренный тревожный вызов.
Станция Galaxy комплектуется электронным блоком и малогабаритной приемопередающей антенной, работающей через IMMARSAT и принимающей сигналы GPS. Galaxy имеет встроенный шестиканаль-ный GPS-датчик, определяющий координаты и скорость транспортного средства, и с помощью спутника передает в диспетчерский центр или принимает от него служебные данные.
Специализированный бортовой компьютер MDT (Mobile Data Terminal) для совместной работы с Galaxy имеет ударопрочный корпус, герметичную русифицированную клавиатуру, жидкокристаллический дисплей 4 строки по 40 символов. MDT позволяет подключить различные датчики, такие как датчики температуры для холодильника, датчики уровня топлива, датчики сигнализации об ударе и опрокидывании, датчики взвешивания груза, датчики пожарно-охранной сигнализации (блокировка дверей, сейфов, включение спецустройств и выключение двигателя), датчик тахометра для фиксации режима работы двигателя. В MDT вмонтирован специальный слот для карточки памяти, которая может использоваться как накопитель маршрутной информации, а также слот для считывания штрихкодовой информации. Компьютер может быть перепрограммирован для связи, для накопления маршрутной информации, для того и другого одновременно. Существует возможность изменить программу таким образом, чтобы по таймеру или при прохождении заданных точек маршрута на диспетчерский пункт передавалась объективная, привязанная по времени и координатам информация о состоянии всех датчиков.
Диспетчерский центр представляет собой комплекс, включающий до 20 персональных ЭВМ, работающих в локальной сети. При этом диспетчерам разрешен доступ только к определенной информации. Программное обеспечение центра состоит из картографического модуля, пакета LOGIQ и интерфейса к системе IMMARSAT через телефонный модем, линию Х.25 или станцию Galaxy.
Программное обеспечение системы позволяет передавать текстовые сообщения всем или выбранным транспортным средствам, принимать сообщения от водителей или экипажей и отображать положение транспортного средства на электронной карте по полученным координатам. В его основе лежит база данных, в которой сохраняется вся информация о состоянии транспортных средств и действиях диспетчеров. В любой момент времени можно получить данные о том, где был транспорт и каково его состояние.
При включении в состав аппаратуры центра больших экранов возможен перенос отображения информации на средства коллективного пользования.
Ряд исследовательских проектов Европейского сообщества позволил определить следующие преимущества и выгоды предлагаемой технологии.
1. Сокращение расходов на телефонные разговоры (трафик IMMARSAT-C значительно экономичнее).
2. Возможность попутной загрузки.
3. Повышение безопасности перевозок (оперативный информационный обмен).
4. Эффективный контроль за экипажем.
5. Снижение расхода топлива.
6. Сокращение холостого пробега.
7. Экономия времени диспетчера и водителя.
8. Улучшение планирования использования средств.
9. Быстрая помощь при аварии или поломке.
10. Повышение уровня сервиса для заказчика.
11. Повышение среднего коэффициента загрузки.
12. Расширение круга решаемых задач.
СИБИРСКАЯ ГОСУДАРСТВЕННАЯ ГЕОДЕЗИЧЕСКАЯ АКАДЕМИЯ
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ
Лекция 11
В настоящее время на рынке России представлено множество фирм выпускающих данную продукцию: Leica, Sokkia, Spectra Precision, Topcon, Nicon, Karl Zeiss, Trimble, Pentax, Уральский оптико-механический завод.
Современные электронные тахеометры имеют широкую область применения: от высокоточных измерений в сетях сгущения и инженерно-геодезических построениях до кадастровых, топографических и простейших измерений в строительстве.
За счет полностью автоматизированного процесса записи данных наблюдений и встроенного программного обеспечения в современных электронных тахеометрах, производительность работ повышается как минимум на 100%.
В современных условиях важно, чтобы исполнитель работал не с прибором, а с компьютерной электронной системой.
Применение электронных тахеометров для сбора аналитической информации об инженерных сооружениях и объектах недвижимости позволяет полностью автоматизировать процессы сбора, передачи и обработки информации в дальнейшем на ПЭВМ с применением современных программных средств.
1. Сбор данных оптико-электронными измерительными системами
Одним из наземных методов сбора информации является сбор данных с применением электронных тахеометров.
Впервые термин "Электронный тахеометр", представленный на рисунке 1, прозвучал в геодезическом мире в 1971 году, когда появились новые, с точки зрения технологии измерений, инструменты, объединившие в себе светодальномер, цифровой теодолит с электронным измерением углов и модуль памяти для сохранения результатов измерений. Это были Geodimeter-700 и Reg Elta 14 известных во всем мире компаний AGA (позднее Geotronics AB, Швеция) и Opton (Германия).
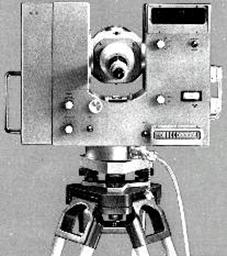
Рисунок 1 – Первая модель тахеометра
Конечно, первые модели электронных тахеометров были далеки от идеала. Большой размер и масса прибора, много различных тумблеров, кнопок и ручек сразу же поставили электронные тахеометры в разряд самых сложных геодезических приборов. Кроме того, они имели весьма высокую стоимость. И все же, эти уникальные приборы уже в то время имели большое преимущество перед традиционными приборами. Они обеспечивали высокую точность угловых и линейных измерений, освобождали от визуального снятия отсчетов, а также заметно повышали эффективность полевых работ за счет скорости измерений.
На сегодняшний день электронный тахеометр, представленный на рисунке 2, стал компактным, надежным, удобным и более дешевым.
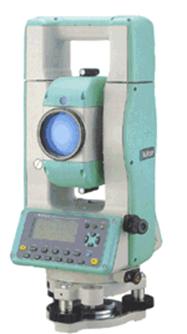
Рисунок 2 – Современный электронный тахеометр
За право считаться лучшими электронными тахеометрами борются многие известные компании. Среди них европейские: Spectra Precision, Zeiss, Leica, УОМЗ и японские Sokkia, TOPCON, Nikon, Pentax.
Точность измерения углов различными типами электронных тахеометров лежит в пределах от 0.5" до 10", что дает возможность использовать их как для создания высокоточных опорных геодезических сетей, так и для решения различных инженерных, кадастровых задач, проведения теодолитных и тахеометрических съемок любых масштабов. Причем взятие отсчетов по угломерным кругам производится автоматически с помощью специальных электронных датчиков, что исключает ошибку исполнителя при взятии отсчета и положительно сказывается на точности и скорости измерений.
В последних моделях тахеометров стала широко использоваться операционная система MS-DOS (TOPCON GTS-710, Nikon DTM-800, Sokkia PowerSet). При этом исполнитель общается уже в полевых условиях с обычным IBM-совместимым компьютером. Таким образом, решается проблема интеграции процесса полевых измерений и их обработки.
Во всех современных электронных тахеометрах используется электронный датчик наклона прибора (компенсатор), который автоматически вносит поправки в измерения при отклонении оси вращения прибора от вертикали, причем некоторые тахеометры имеют двухосевые компенсаторы, вносящие поправки, как в вертикальные, так и в горизонтальные углы. Определенные при исследовании основные инструментальные погрешности запоминаются во внутренней памяти прибора и учитываются при измерениях. С появлением этой возможности отпала необходимость механического устранения инструментальных погрешностей, что значительно увеличило срок службы инструмента и его надежность.
Внутренние программы обеспечивают не только полную настройку прибора, проведение измерений, сохранение результатов в памяти, но и их математическую обработку: от расчета площадей до уравнивания ходов. В процессе полевых работ производится оценка точности измерений, а продуманные алгоритмы программ помогают получить быстрый и качественный результат.
В отличие от первых моделей, управляемых с помощью тумблеров и имеющих газоразрядные индикаторы, современный тахеометр обладает удобной клавиатурой, состоящей из небольших, преимущественно резиновых, клавиш и большим жидкокристаллическим экраном, способным нести большой объем информации. А при использовании графического экрана процесс полевых измерений стал не только более удобным, но и более наглядным (например, при разбивке, когда исполнитель видит на экране, в каком направлении и на сколько необходимо переместить отражатель). Управление прибором и выполнение измерений осуществляется с помощью внутренних программ, путем выбора необходимых пунктов меню.
Система наведения зрительной трубы на цель не претерпела серьезных изменений. Следует лишь отметить, что во многих точных тахеометрах стали использоваться двухскоростные наводящие винты, обеспечивающие быстрое и качественное наведение.
Несмотря на компактный размер электронного тахеометра, в некоторых моделях нашлось место и для микродвигателей. Это дало возможность выполнять съемку только одному специалисту. Исполнитель устанавливает на точках съемки отражатель, а тахеометр автоматически отслеживает передвижение призмы отражателя, производит измерения и записывает их результаты во внутреннюю память.
Управление тахеометром, представленным на рисунке 3, осуществляется исполнителем по радиоканалу. При этом прибор автоматически наводится точно на центр призмы. Высокая точность наведения на отражатель и возможность выполнения всех видов измерений одним специалистом - это значительный шаг в эволюции электронных тахеометров.

Рисунок 3 - Радиоуправляемый электронный тахеометр
Отдельно следует упомянуть о тахеометрах нового типа, способных измерять расстояния до объектов без использования традиционных призменных отражателей. В качестве отражателя в данном случае используется поверхность наблюдаемой цели. Точность измерения расстояний (до 1000 м) несколько ниже, чем с использованием призмы, и пока составляет порядка 1-20 см.
При работе с оптическими геодезическими приборами под дождем или в сильный мороз возникают трудности. Для большинства приборов не предусмотрено использование их при неблагоприятных внешних условиях. В результате работа останавливается, а заказчик начинает терять свое время и деньги.
И опять на помощь приходят современные технологии. Некоторые компании уже наладили производство тахеометров, адаптированных для использования в суровых условиях (TOPCON, Sokkia, Spectra Precision, Zeiss). Степень водонепроницаемости таких приборов характеризуется показателем IPX, соответствующим классу международного стандарта IEC529. Наивысшим классом водонепроницаемости IPX7 пока обладает прибор компании Sokkia SET5W, который во включенном состоянии может находиться около 30 минут при полном погружении в воду и это не сказывается на его работоспособности. В целом, водозащищенность классов IPX2 - IPX6 считается достаточной для работы под любым дождем или снегом.
Учитывая, что преобладающая часть территории России подвержены влиянию холодов то становится актуальным вопрос об использовании оптико-электронной техники с повышенной морозостойкостью. Требования международных стандартов устанавливают диапазон рабочих температур от минус 20 до +50°С. Компанией TOPCON, Spectra Precision и Zeiss выпускаются тахеометры способные работать при минус 30°С.
Каждый современный электронный тахеометр имеет встроенный интерфейсный порт (RS-232C), обеспечивающий с помощью кабеля быструю и простую связь с любым IBM-совместимым персональным компьютером. В роли такого компьютера может выступать и внешний контроллер-накопитель. Это устройство может обеспечить тахеометр дополнительным объемом памяти для хранения данных измерений. В контроллер можно ввести набор дополнительных программ для обработки и расчетов в процессе измерений или более удобного ввода информации в тахеометр, например кодов описания точек. Некоторые тахеометры снабжены специальными разъемами для подключения карт памяти стандарта PCMCIA. Такие карты могут использоваться как обычные дискеты для записи на них данных измерений или прикладных программ для тахеометра.
Современные электронные тахеометры являются единой конструкцией, объединяющей угломерный и дальномерный комплексы. Зарубежные электронные тахеометры включают в себя компактную компьютерную измерительную систему с регистрацией данных и программным обеспечением для различных областей применения: от высокоточных измерений в сетях сгущения и инженерно-геодезических построениях до кадастровых, топографических и простейших измерений в строительстве. Регистрация данных производится во внутреннюю память прибора либо на карту памяти емкостью от 32 до 512 Кб. Программное обеспечение инсталлируется изготовителем приборов, либо поставляется на дискетах. Так же на некоторых приборах имеется возможность вводить собственное программное обеспечение через полевой компьютер.
Для уменьшения массы и габаритов часто визирный канал угломерного и приемо-передающие каналы дальномерного комплексов различным образом совмещают. Подключение регистрирующего устройства позволяет не только выдавать результаты на табло или печатающее устройство, но и довести работу до этапа составления топографического плана, путем организации цепочки:
Современные электронные тахеометры обеспечивают высокий комфорт работы благодаря:
- наглядной программной концепции;
- применению современной меню - техники и последовательного диалогового режима;
- наличию дисплея с однозначно фиксированными символами клавиатуры;
- непосредственному выбору главных программных блоков;
- изменению процесса обслуживания с помощью программируемых кнопок.
Высокая надежность процесса измерений, обеспечивающаяся благодаря:
- автоматической компенсации ошибок визирования, оси вращения трубы и индекса вертикального круга;
- автоматической коррекции результатов измерений для выявления кривизны Земли и рефракции;
- автоматической регистрации температуры воздуха при производстве полевых измерений и введению поправок за метеоусловия;
- автоматическому введению поправок за масштабный коэффициент и постоянную прибора;
- автоматическому учету единиц измерений, исходной системы при угловых измерениях и системы координат.
Таким образом, современный исполнитель работает не с прибором, а с компьютерной электронной системой.
СИБИРСКАЯ ГОСУДАРСТВЕННАЯ ГЕОДЕЗИЧЕСКАЯ АКАДЕМИЯ
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ
Лекция 12
1.Программное обеспечение электронных тахеометров
Современные электронные тахеометры обладают встроенным программным обеспечением, которое автоматизирует процесс измерений и вычислений, существенно облегчая выполнение различных задач. Если электронный тахеометр имеет большой объем программной памяти, то это обеспечивает прямой доступ ко многим в настоящее время предоставляемым и инсталлируемым программам. У большинства электронных тахеометров имеется возможность создания собственных программ, дополнительное программное обеспечение предоставляется в принятом в торговле формате дискет для персональных компьютеров (5,25; 1,4") и передается пользователем с помощью персонального компьютера, совместимого с IBM PC и кабеля интерфейса.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
