

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Результаты эксперимента: Время интегрирующего действия, коэффициент интегрирующего действия и коэффициент передачи ПИ-регулятора.
Входной сигнал Ui: 1 В/дел. Управляющая переменная Uy1: 1 В/дел. Uy2: 1 В/дел. Uy3: 1 В/дел.
|
Рисунок 2.5 - Лист решений (переходные кривые ПИ-регулятора)
Таблица 2.2 – Значения вычисленных параметров |
Вычисления | |||
Номер измерения | 1 | 2 | 3 |
Коэффициент передачи KP | |||
Коэффициент интегрирующего действия KI | |||
Время интегрирующего действия Tn |
Контрольные вопросы
1. Из каких модулей состоит модель ПИ-регулятора?
2. Назовите параметры настройки ПИ-регулятора.
3. Проведите анализ изменения выходного параметра ПИ - регулятора. Укажите составляющую, обусловленную пропорциональным модулем, и составляющую, обусловленную интегральным модулем.
4. Как реагирует ПИ-регулятор на скачок напряжения на входе? Опишите, как изменяется выходное напряжение ПИ-регулятора.
5. Если импульс на входе ПИ-регулятора исчезает, выходное напряжение падает, но до ненулевого значения. Что определяет это значение?
6. На приведенном ниже рисунке представлен возможный вид кривой рассогласования Ui на входе регулятора после скачка управляющей переменной: сначала рассогласование очень велико, затем регулятор формирует управляющее воздействие и сводит величину рассогласования к нулю. Изобразите кривую выходного напряжения П-регулятора с
Ui = 2 и кривую выходного напряжения ПИ – регулятора также с Ui = 2 и сравнительно большим временем интегрирующего действия.
Рисунок 2.6 – Кривая рассогласования
Исследование пропорционально-дифференциального (ПД) регулятора
Цель работы: исследование свойств пропорционально-дифференциального (ПД) регулятора
3.1 Теоретическая часть
Напряжение на выходе П-регулятора формируется только при наличии напряжения на его входе. Если входное напряжение П-регулятора падает до нуля, выходное напряжение также пропадает. Напряжение на выходе ПИ-регулятора увеличивается, пока действует напряжение на его входе. Даже при очень небольших значениях входного напряжения ПИ-регулятора выходное напряжение продолжает расти; рост выходного напряжения прекращается только после снятия входного напряжения. ПИ-регулятор является очень точным, но сравнительно медленным регулятором, т. к. процесс интегрирования требует определенных затрат времени. Если необходимо управлять инерционными объектами (например, нагревательной установкой), требуется регулятор, реагирующий, прежде всего на изменения входного напряжения. В качестве таких регуляторов применяют ПД - или ПИД-регуляторы. Они позволяют достаточно просто компенсировать начальную инерцию системы.
В ПД-регуляторе выходное напряжение зависит не только от величины входного напряжения, но и от скорости его изменения. Даже небольшие изменения сигнала рассогласования на входе ПД-регулятора приводят к появлению значительного выходного напряжения. Длительность интервала времени, в течение которого регуляторы с дифференцирующей составляющей компенсируют начальную инерцию системы, определяется областью дифференцирующего действия на переходной характеристике. На участке возрастания входного напряжения дифференцирующее действие может быть определено скачком амплитуды выходного напряжения в начале этого участка. Установившееся значение регулируемой переменной в системе с ПД-регулятором достигается раньше, чем в системе с П-регулятором, за счет интервала времени дифференцирующего действия. На рисунке 3.1 представлена переходная характеристика ПД-регулятора.
 |
Рисунок 3.1 - Переходная характеристика ПД-регулятора
Коэффициент передачи KP ПД-регулятора определяется следующим отношением напряжений в установившемся состоянии:
KP = Uy/Ui .
Параметры дифференцирующей составляющей трудно определить из переходной характеристики, т. к. она всегда приводит к перегрузке (ограничению амплитуды выходного напряжения). Вместе с тем наличие области дифференцирующего действия дает возможность сравнить работу регуляторов с различными значениями параметров. На рисунке 3.2 иллюстрируется отклик ПД - и П-регулятора на линейно возрастающее входное напряжение.
Коэффициент дифференцирующего действия KD ПД-регулятора определяет значение выходного напряжения при изменении входного напряжения со скоростью 1 В/с:
KD = ![]() .
.
Рисунок 3.2 - Отклик ПД - и П-регулятора на линейно возрастающий входной сигнал
Время дифференцирующего действия Tv связывает между собой коэффициент пропорционального действия и коэффициент дифференцирующего действия:
Tv = KD/KP .
Малое время дифференцирующего действия и, соответственно, незначительная область дифференцирующего действия на переходной характеристике означают, что пропорциональная действие ПД-регулятора существенно больше его дифференцирующего действия.
За счет интервала времени дифференцирующего действия регулятор с дифференцирующей составляющей обладает большим быстродействием по сравнению с регулятором с одной только пропорциональной составляющей (см. рисунок 3.2).
3.2 Отклик ПД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе
Соберите регулирующую цепь, представленную на рисунке 3.3
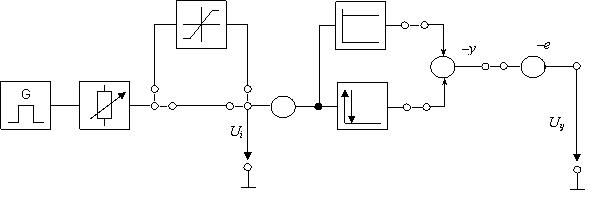
Рисунок 3.3 - Регулирующая цепь
Обратите внимание: при выполнении эксперимента в гнезда RESET должна быть вставлена перемычка, а гнезда SINGLE должны быть свободны!
Для исследования отклика на ступенчатое воздействие используется импульс напряжения, подаваемый на потенциометр уставки, а при исследовании отклика на линейно возрастающее напряжение (линейное воздействие) необходимо применять интегратор уставки.
Задайте следующие настройки для проведения отдельных измерений (таблица 3.1). |
Таблица 3.1 – Параметры настройки регулятора |
Параметры | Отклик на ступенчатое воздействие | Отклик на линейное воздействие | ||
Номер измерения | 1 | 2 | 3 | 4 |
Регулятор | П | ПД | П | ПД |
Длительность измерительного цикла tm | 20 мс | |||
Интегратор уставки | — | Третья метка | ||
Скачок напряжения Ui | 1 В | |||
Коэффициент передачи KP | 4 | |||
Время дифференцирования TD | — | 0,1 с, третья метка | — | 0,1 с, третья метка |
Постройте кривые отклика на ступенчатое и линейное воздействия при настройках, указанных в таблице 3.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу решений (таблица 3.2).
Результаты эксперимента: Отклик ПД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
