

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
|

СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ (СГУПС)
РЕГУЛЯТОРЫ
Методические указания для выполнения лабораторных работ
Новосибирск 2009
УДК 681.515.
Регуляторы. Методические указания к проведению лабораторных работ. / Сост. , .- Новосибирск: Изд-во СГУПСа, 2009.-
Методические указания к лабораторным работам по регуляторам, выполняемые на стендах с электронным управлением, содержат инструкции по работе с измерительными приборами, краткий теоретический материал и инструкции по выполнению. Данные методические указания предназначены для студентов специальностей М, ВВ, МС при изучении дисциплин «Управление техническими системами», «Автоматизация систем водоснабжения и водоотведения», «Автоматизация строительных, дорожных и путевых машин» и выполнены на основе учебно-методического пособия фирмы «hps SystemTechnik».
Методические указания рассмотрены и утверждены к печати на заседании кафедры «Электротехника, диагностика и сертификация»
Ответственный редактор канд. тех. наук, доц.
Рецензент: , к. т.н., доцент кафедры «Информационные системы»
ФГОУ ВПО «Новосибирская государственная академия водного транспорта».
© , 2009
© Сибирский государственный университет путей сообщения, 2009
Введение
Регуляторы широко применяются для создания локальных систем регулирования различных технологических параметров, являясь неотъемлемой частью системы автоматического регулирования (САР). Настройка регулятора должна обеспечивать определенный запас устойчивости системы автоматического регулирования и надлежащее качество регулирования.
При подготовке к лабораторной работе необходимо изучить особенности применения каждого типа регулятора с учетом характера протекания технологического процесса, особенностей работы объекта.
Лабораторные работы по теме «Регуляторы» предусматривают изучение характеристик регулирующих блоков на моделях, имитирующих поведение реальных промышленных регуляторов.
Реальный регулятор имеет следующие функциональные блоки (устройства): измерительное, задающее, сравнивающее, управляющее, исполнительное. Исследуемая модель регулятора имитирует действие управляющего (собственно регулирующего) блока, в котором задаются параметры регулятора, формирующие закон регулирования.
В качестве входных воздействий используются сигналы различной формы и уровня, генерируемые блоком «Генератор».
При подготовке к защите лабораторных работ необходимо сделать выводы по каждому проведенному эксперименту, ответить на контрольные вопросы, приведенные в методическом указании к каждой работе.
Отчет по выполненной работе составляется в соответствии с приложением А.
1 Лабораторная работа № Р1
Исследование пропорционального (П) регулятора
Цель работы: исследование свойств пропорционального (П) регулятора
1.1 Теоретическая часть
Задачей П-регулятора является поддержание нулевого значения потенциального сигнала рассогласования, поступающего на его вход с компаратора, с максимально возможным быстродействием. Этот критерий является ключевым при выборе П-регулятора для решения определенной задачи. Выходной сигнал Uy П-регулятора, как следует из его названия, пропорционален входному сигналу Ui и является выходным сигналом для регулятора и одновременно управляющим (входным) для объекта регулирования. Следовательно, сигнал на выходе регулятора может появиться только при наличии сигнала на его входе. Поэтому для получения отличного от нуля значения управляющей переменной на выходе необходимо наличие ненулевого сигнала на входе. Входной сигнал регулятора в лабораторной установке эквивалентен сигналу рассогласования системы автоматического регулирования (САР). При этом даже при наличии сигнала рассогласования П-регулятор можно использовать только при высоком усилении, гарантирующем низкую ошибку регулирования. Однако высокое усиление в регулирующей цепи повышает опасность возникновения автоколебаний.
Основными областями применения П-регуляторов являются системы позиционирования в станках с числовым программным управлением (ЧПУ), системы управления наполнением и т. п. Такие системы всегда характеризуются пропорциональным действием и при этом значение выходной переменной, например, положение суппорта с инструментом, в них сохраняется, даже если управляющая переменная (выходной сигнал регулятора) становится равной нулю (т. е. если сигнал рассогласования на входе регулятора также принимает нулевое значение).
Параметр П-регулятора – коэффициент передачи (или коэффициент пропорционального действия) KP – определяется согласно переходной характеристике (в установившемся состоянии, рисунок 1.1) по формуле
KP = Uy/Ui (1.1)
Рисунок 1.1 – Переходная характеристика П - регулятора
1.2 Коэффициент передачи П - регулятора
Соберите регулирующую цепь для получения переходной характеристики, представленную на рисунке 1.2. Запустите программу «USB Осциллограф». На панели управления осциллографом, как показано на рисунке 1.4, установите настройки:
- по каналу A и B установите масштаб развертки 8 В;
- регулятором «период» установите значение 40 мкс;
- включите синхронизацию сигнала по каналу А.
Рисунок 1.2 - Схема регулирующей цепи
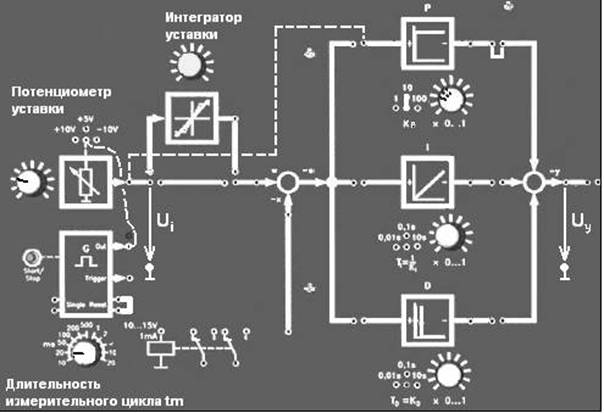
Рисунок 1.3 - Регулирующая цепь пропорционального регулятора на панели «Регуляторы»

Рисунок 1.4 - Панель управления осциллографом
Компаратор, включенный последовательно с регулятором, преобразует выходной сигнал регулятора таким образом, чтобы все значения напряжения на экране осциллографа были положительными.
Обратите внимание: при выполнении эксперимента в гнезда «Сброс» блока «Длительность измерительного цикла» должна быть вставлена перемычка, а гнезда «Одн.» должны быть свободны!
Задайте следующие настройки для проведения отдельных измерений (таблица 1.1).
Таблица 1.1 – Параметры настройки П - регулятора
Номер измерения | 1 | 2 | 3 |
Длительность измерительного цикла tm | 20 мс | ||
Входной сигнал Ui | 1,5 В | ||
Коэффициент передачи KP | 2 | 4 | 6 |
Управляющая переменная Uy | |||
Расчетный коэффициент передачи KP= Uy/Ui |
Коэффициент передачи KP устанавливается при помощи потенциометра пропорционального блока, входное напряжение Ui регулируется при помощи «потенциометра уставки», длительность измерительного цикла устанавливается при помощи потенциометра «длительность измерительного цикла» на панели ПИД.
Постройте кривые отклика на ступенчатое воздействие при настройках, указанных в таблице 1.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу 1.1.
Входной сигнал Ui: 1 В/дел. Управляющая переменная (выходной сигнал) Uy1: 1 В/дел. Uy2: 1 В/дел. Uy3: 1 В/дел.
t = 1 мс/дел. |
Рисунок 1.5 - Лист решений (переходные кривые П – регулятора)
Контрольные вопросы
1. Укажите параметры настройки П - регулятора.
2. Проведите анализ изменения выходного параметра П - регулятора.
3. Укажите условия применения П - регулятора.
4. Как П – регулятор реагирует на изменение входного сигнала? Выходной сигнал П – регулятора изменяется очень медленно и имеет задержку или изменяется соответственно изменениям входного сигнала при скачке напряжения на входе?
5. Как изменяется напряжение на выходе П – регулятора, когда напряжение на входе становится равным нулю после подачи ступенчатого входного сигнала?
6. П – регулятор имеет настраиваемый коэффициент передачи KP в диапазоне значений от 4 до 50. Какое входное напряжение требуется для того, чтобы напряжение на выходе П – регулятора составляло +3 В?
2 Лабораторная работа № Р2
Исследование пропорционально - интегрального (ПИ) регулятора
Цель работы: исследование свойств пропорционально-интегрального (ПИ) регулятора
2.1 Теоретическая часть
Действие интегрирующего элемента в регулирующей цепи может быть интерпретировано как действие запоминания. Например, уровень воды в дождевой бочке «запоминает», сколько воды было долито или слито из бочки. Объем воды, поступающей в бочку с каждым прошедшим дождем, «интегрируется» бочкой, что приводит к повышению уровня воды. А когда дождь заканчивается, это не означает, что уровень воды в бочке возвращается к нулевой отметке.
Аналогичным образом осуществляется рабочий процесс привода подачи в станке с ЧПУ. Импульс напряжения на входе исполнительного двигателя приводит к перемещению суппорта в определенную позицию, в которой он остается и после снятия напряжения на входе. Поэтому регулятор, управляющий этим двигателем, не нуждается в поддержании определенного уровня выходного напряжения для обеспечения постоянного значения регулируемой переменной (позиции суппорта). Регулятор лишь поддерживает значение управляющей переменной на определенном уровне, пока позиция суппорта отличается от заданной.
Рисунок 2.1 - Переходная характеристика ПИ-регулятора и входное воздействие
Взаимосвязи в системе управления скоростью совершенно другие. В качестве управляющей переменной здесь также выступает напряжение на входе исполнительного двигателя, а регулируемой переменной является частота вращения двигателя. Пропорциональное действие в такой системе в большей степени означает, что частота вращения остается постоянной до тех пор, пока значение управляющей переменной остается на постоянном уровне. Если управляющая переменная (входное напряжение) снимается, частота вращения также падает до нуля. Т. е. рассматриваемая система не обладает эффектом памяти.
При управлении подобным объектом таким образом, чтобы действительное значение регулируемой переменной было равно значению задающей переменной, т. е. чтобы не было рассогласования, необходима реализация в системе «функции памяти», т. к. управляющая переменная на входе объекта управления должна сохраняться. Это обеспечивается ПИ-регулятором. На рисунке 2.1 иллюстрируется, как должна определяться переходная характеристика ПИ-регулятора.
Коэффициент передачи (или коэффициент пропорционального действия, или коэффициент усиления) в момент подачи единичного входного воздействия:
KP = Uy/Ui
При ступенчатом входном воздействии пропорциональное действие приводит к скачку выходного напряжения, регулятор сначала реагирует очень быстро. Благодаря интегрирующему действию затем имеет место линейный рост выходного напряжения со скоростью vI = ΔUy/Δt.
Коэффициент интегрирующего действия KI определяет, как быстро изменяется выходное напряжение при изменении входного напряжения Ui на 1 В:
KI = vI/Ui .
Коэффициент интегрирующего действия часто называют интегральным усилением. Чем больше значение KI, тем быстрее возрастает выходное напряжение и тем точнее работает регулятор.
Переменная, связывающая между собой величины KI и KP, называется временем интегрирующего действия и обозначается Tn. Эта переменная необходима регулятору для обеспечения того же самого отклонения напряжения на выходе с интегрирующей составляющей, которое было сгенерировано пропорциональной составляющей в момент скачка напряжения на входе. Графическая иллюстрация сказанного представлена на рисунке 2.1. Время интегрирующего действия определяется по следующей формуле:
Tn = KP/KI .
Короткое время интегрирующего действия Tn для ПИ-регулятора означает, что коэффициент интегрирующего действия KI значительно больше коэффициента усиления KP.
2.2 Время интегрирующего действия, коэффициент интегрирующего действия и коэффициент передачи ПИ-регулятора
Соберите регулирующую цепь, представленную на рисунке 2.2, для получения переходной характеристики. Цепь составлена таким образом, что входное (Ui) и выходное (Uy) напряжения, а также управляющее напряжение имеют одинаковую полярность.
Рисунок 2.2 - Схема регулирующей цепи
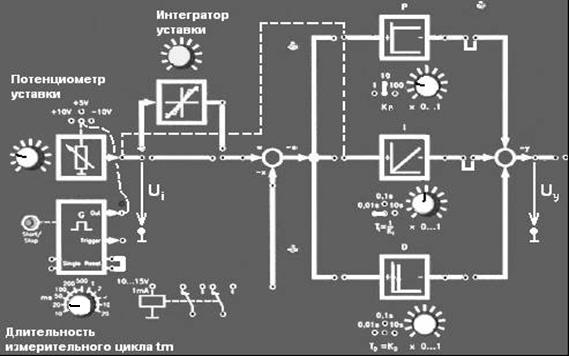
Рисунок 2.3 - Регулирующая цепь

Рисунок 2.4 - Панель управления осциллографом
Компаратор, включенный последовательно с регулятором, преобразует выходной сигнал регулятора таким образом, чтобы все значения напряжения на экране осциллографа были положительными.
Обратите внимание: при выполнении эксперимента в гнезда «Сброс» должна быть вставлена перемычка, а гнезда «Одн.» должны быть свободны!
Задайте следующие настройки для проведения отдельных измерений (таблица 2.1).
Таблица 2.1- Параметры настройки регулятора |
Номер измерения | 1 | 2 | 3 |
Длительность измерительного цикла tm | 20 мс | ||
Скачок напряжения Ui | 1,5 В | ||
Коэффициент передачи KP | 2 | 2 | 5 |
Время интегрирования TI | 5 мс | 10 мс | 10 мс |
Постройте кривые отклика на ступенчатое воздействие при настройках, указанных в таблице 2.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу решений (таблицу 2.2.).

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
