


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Сосредоточенные системы.
При возмущении скважины с постоянным дебитом, понижение уровня в ней формируется по схеме, достаточно точно описывается апериодическим звеном, передаточная функция которого W(p) имеет вид:
![]() (32),
(32),
где: k – коэффициент усиления объекта; Т – постоянная разгона; t - время задержки; р – оператор Лапласа. Полагая р = j´ω, где ω – круговая частота, определяют частотные характеристики:
![]()
 (33)
(33)
позволяющие рассчитать оптимальные параметры регулятора.
Согласно (30) оптимальным режимом является такой, который обеспечивает пропорциональность соотношения динамического уровня в любой водозаборной скважине к предельно возможному его положению на любой момент времени. Коэффициент пропорциональности (k0) рассчитывается по формуле:
 (34)
(34)
где: Hi(t) – положение уровня в скважине на начало прогнозируемого периода; Ci = 1/kp (kp – коэффициент усиления регулятора); DQсум– планируемое суммарное изменение дебита водозабора за период Dt; Hid – предельно допустимое положение уровня.
Структурная схема управления дана на рис. 8. Рассогласование оптимального Нi(t)з (Нi(t)з= k0×Hid) и фактического уровня DHi(t) поступает на регулятор, где вырабатывается управляющее воздействие на модель объекта в виде изменения дебита водозаборных скважин DQi,(t). Воздействие измененной нагрузки на эксплуатационные
 |
Рис. 8. Структурная схема управления.
скважины приводит к перераспределению напоров в водоносном пласте и формированию новой депрессионной воронки, что контролируется через режимную сеть скважин, формирующих обратную связь.
Наиболее предпочтительны в схемах управления гидродинамическими процессами, являются пропорциональный регулятор, с коэффициентом усиления равным удельному понижению скважины, или ПИД-регулятор, закон регулирования которого имеет вид:
![]() (35),
(35),
где: Q(t) – управляющее воздействие; kp – коэффициент усиления регулятора; DН – рассогласование управляемого параметра; Ти – время изодрома; Тп – время предварения.
Системы с распределенными параметрами.
Положим, что имеется объект, в котором осуществляется процесс перераспределения интересующего параметра. Математическая модель описывается уравнением:
 (36),
(36),
0<x<xL, 0<y< yL, 0<z< zL,
где ![]() - фазовая переменная; x, y, z, - пространственные координаты; а – заданный коэффициент; xL, yL, zL – заданные числа.
- фазовая переменная; x, y, z, - пространственные координаты; а – заданный коэффициент; xL, yL, zL – заданные числа.
Граничные и начальные условия для уравнения (36) имеют вид:

 ,
,  ,
,  . (37).
. (37).
Функцией выхода является поле![]() , где
, где ![]() -заданное число (0< <zL).
-заданное число (0< <zL).
Разложим входное воздействие ![]() в ряд Фурье. Учитывая граничные условия (37), входное воздействие может быть представлено в виде:
в ряд Фурье. Учитывая граничные условия (37), входное воздействие может быть представлено в виде:
![]() ,
,
где ![]() ;
; ![]() .
.
Передаточная функция объекта по ![]()
![]() моде входного воздействия:
моде входного воздействия:
 , (38)
, (38)
![]() , где
, где  ,
,  .
.
Таким образом, рассматриваемый распределенный объект может быть представлен в виде совокупности передаточных функций ![]() .
.
Подставляя ![]() , получим комплексный передаточный коэффициент объекта. Из (38) видно, что комплексный передаточный коэффициент объекта зависит от
, получим комплексный передаточный коэффициент объекта. Из (38) видно, что комплексный передаточный коэффициент объекта зависит от  .
.
Объект автоматического управления принадлежит к классу пространственно-инвариантных, если комплексный передаточный коэффициент по каждой пространственной моде входного воздействия не зависит от пространственных координат. Математически это определение означает:
![]() ,
, ![]()
Интерпретация введенного определения на языке структурных схем заключается в следующем: объект управления, удовлетворяющий определению, может быть представлен совокупностью независимых блоков с комплексными передаточными коэффициентами ![]() ,
, ![]() .
.
На физическом уровне определение означает, что пространственная мода входного воздействия, проходя через объект управления, изменяет только амплитуду.
На математическом уровне – собственные функции оператора объекта могут быть представлены в виде комбинации ![]() и
и ![]() (функциями Bm,h,g,x,(x,y)).
(функциями Bm,h,g,x,(x,y)).
В ряде работ показано, что многие распределенные объекты, передаточные функции которых описываются с использованием функций Грина, принадлежат к классу пространственно-инвариантных.
Аналогично вводится понятие пространственно-инвариантных систем: система принадлежит к классу пространственно-инвариантных (ПИ), если комплексный передаточный коэффициент по каждой пространственной моде входного воздействия не зависит от пространственных координат.
Представим распределенную систему управления, состоящую из распределенного объекта и распределенного регулятора. Введем понятие пространственной совместимости. Система обладает свойством пространственной совместимости, если при наложении совпадают области распределения входных воздействий регулятора и объекта (формирующих систему блоков). При этом состояния входных воздействий на границах рассмотренных областей описываются одинаковыми условиями.
Относительно достаточного условия пространственной инвариантности системы управления доказано утверждение, что: для того, чтобы система автоматического управления обладала свойством пространственной инвариантности, достаточно чтобы формирующие систему блоки обладали свойством пространственной инвариантности, и при этом система обладала свойством пространственной совместимости.
Существует два подхода к анализу систем с распределенными параметрами:
– определение реакции системы на входной сигнал, представленный в виде комбинации дельта функций в пространственной и временной областях;
– определение реакции объекта на собственные вектор-функции оператора объекта. В этом случае распределенный объект (систему) структурно можно представить бесконечной совокупностью независимых условно сосредоточенных контуров.
Положим, что собственные вектор-функции представлены на основе ортогональных разложений в ряды Фурье по пространственным координатам. Тогда, для частотного анализа, определяется реакцию объекта на входное воздействие, заданное в виде комбинации: Uh(x,wt) = Ch(wt)*Bh(x), где ![]() ,
, ![]() – заданные числа, η – выбранное число, Bη(х) – собственные вектор-функции оператора объекта.
– заданные числа, η – выбранное число, Bη(х) – собственные вектор-функции оператора объекта.
Пусть реакция объекта найдена и представляется в виде Hh(x,wt), следовательно, может быть определен комплексный передаточный коэффициент ![]() . Если эксперименты осуществляются на реальном физическом объекте, то методика экспериментальных исследований заключается в следующем:
. Если эксперименты осуществляются на реальном физическом объекте, то методика экспериментальных исследований заключается в следующем:
1. Объект выводится на рабочий стационарный режим (Uη* (x) ,Hη*(x));
2. К стационарному входному воздействию в момент времени t0 добавляется выбранная пространственная мода (Bη(х) – собственная вектор-функцию оператора объекта), амплитуда которой (Сη) во времени изменяется о колебательному закону;
3. Определяется рассогласование от стационарного режима функции выхода исследуемого объекта ΔHη(x,ω t) = Hh(x,w t) – Hη*(x)
4. Полученное ΔHη(x,ωt) разлагается по собственным вектор-функциям Bυ(х).
Если все коэффициенты разложения (Dυ(ωt)) равны нулю, за исключением коэффициента при υ = η ,то объект принадлежит к классу пространственно-инвариантных. Для пространственно-инвариантных объектов, с использованием графика Сη (ωt) и графика Dη(ωt) определяется рассогласование фаз входного и выходного сигналов и изменение модуля. Проделав аналогичные вычисления для различных значений ω, строятся частотные характеристики для выбранного значения η.
Основная сложность использовании рассматриваемой методики заключается в выборе пространственных мод (Bη(х) – собственных вектор-функций оператора объекта). При выборе учитывается информация о граничных условиях рассматриваемого объекта.
Рассмотрим определение динамических характеристик гидролитосферного процесса. Из водоносного пласта осуществляется отбор воды с помощью эксплуатационных скважин, располагающихся по координате x с интервалом ![]() , число которых m (ξ =
, число которых m (ξ =![]() ). В рабочем состоянии дебит скважин Qξ. Функцией выхода (контролируемым параметром) служит уровень H(х,t), измеряемый с помощью наблюдательных скважин, число которых равно n (
). В рабочем состоянии дебит скважин Qξ. Функцией выхода (контролируемым параметром) служит уровень H(х,t), измеряемый с помощью наблюдательных скважин, число которых равно n (![]() ).
).
Наблюдательные скважины располагаются по координате x с интервалом ![]() на расстоянии УL от рабочих.
на расстоянии УL от рабочих.
Входным (управляющим) воздействием на рассматриваемый объект управления служит дебит Qξ, (ξ = ![]() ), а функцией выхода Hj , (
), а функцией выхода Hj , (![]() ) - уровень понижения давления измеряемый с помощью наблюдательных скважин. Положим, что объект находится в стационарном режиме H(х,t) = H(х).
) - уровень понижения давления измеряемый с помощью наблюдательных скважин. Положим, что объект находится в стационарном режиме H(х,t) = H(х).
Для частотного анализа приложим управляющее воздействие в виде:
Q*ξ= Qξ+C(t) ×cos(π×h×xξ/xL) , (ξ=![]() ) , (39),
) , (39),
где C(t) = q×sin(w´t), q –фиксированное число (значение q выбирается из условия q » 0,1´Qξ, (ξ=![]() )), w – круговая частота, t - время. Разложение по пространственной координате х по cos(π×h×xξ/xL) выбрано в предположении, что отсутствует влияние граничных условий при х = 0 и х = хL на функцию выхода (полагаем, что дискретным аналогом собственных вектор-функций оператора объекта служат функции cos(π×h×xξ/xL), xξ – координаты расположения рабочих скважин, η – выбранное число).
)), w – круговая частота, t - время. Разложение по пространственной координате х по cos(π×h×xξ/xL) выбрано в предположении, что отсутствует влияние граничных условий при х = 0 и х = хL на функцию выхода (полагаем, что дискретным аналогом собственных вектор-функций оператора объекта служат функции cos(π×h×xξ/xL), xξ – координаты расположения рабочих скважин, η – выбранное число).
Положим, что число контрольных скважин (n) таково, что возможно восстановить уровень понижения давления H*(х,t) (путем аппроксимации Hj, (![]() )).
)).
Восстанавливая уровень понижения давления в ti моменты времени (i = l,2,...), разложим функцию H(х,τ) = H*(х,t) - H(х) в ряд Фурье:
![]()
Если все коэффициенты разложения Dg(ti), Bh(ti), (g =1,¥) за исключением Dg=h, равны нулю (близки к нулю, так как входное воздействие аппроксимировано ломаной линией), то объект принадлежит к классу пространственно-инвариантных. Положим, что рассматриваемый объект принадлежит к классу пространственно– инвариантных. Тогда, для вычисления частотных характеристик строится график изменения C = q×sin(w×t) и график изменения коэффициента разложения функции H(x,ti) Dg=h(ti) (рис. 9). По построенным графикам для фиксированной частоты w известными методами определяются рассогласование фаз входного и выходного сигналов j и изменение модуля.
Проделав аналогичную процедуру при различных значениях w, для каждого из выбранных значений h можно построить частотные характеристики.
Наибольшее практическое применение в системах управления гидролитосферными процессами имеет распределенный высокоточный ПИД-регулятор. В отличии от сосредоточенного, такие регуляторы, при выработке управляющего воздействия, учитывают взаимовлияния между скважинами, что позволяет улучшить динамические характеристики работы замкнутой системы управления.
 |
Рис. 9. Графики ![]() .
.
Передаточная функция распределенного ПИД-регулятора имеет вид:
![]() (40),
(40),
где Е1,2,4 – коэффициенты усиления; x, y – пространственные координаты;![]() – лапласиан; n1,2,4 – весовые коэффициенты.
– лапласиан; n1,2,4 – весовые коэффициенты.
Передаточная функция, записанная с использованием обобщенной координаты, может быть представлена в виде следующего соотношения:
![]() (0£ G £ ¥) (41).
(0£ G £ ¥) (41).
Для частотного анализа положим в (41) p = jw и определим модуль (М) и фазу (j ) функции W(G, jw)
![]() (42)
(42)
где ![]() (43)
(43) ![]()
Как следует из (42), минимальное значение модуля будет при:
![]() (44).
(44).
Преобразуем (44) к виду
![]() или
или ![]() (45)
(45)
Минимальное значение модуля будет равно Мmin(G) = K1(G). На рис. 10 приведены частотные поверхности РВР. Уравнение (45) определяет линию перегиба (w(G)).
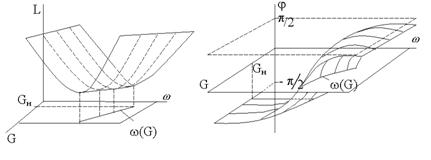
Рис. 10. Частотные поверхности РВР
В некоторых случаях приходится объединять распределенные звенья, образуя распределенные блоки. Разработанная методика синтеза распределенных регуляторов ( и др.) опирается на графическую интерпретацию критерия Найквиста и использует, для формирования структуры регулятора, приведенные распределенные звенья. Входные воздействия в распределенный регулятор и объект реализуются в виде дискретной по пространству функции, а значения функции выхода распределенного объекта, как правило, измеряются в конечном числе точек. Это обусловливает, на этапе практической реализации алгоритмов управления, их матричное представление (в виде многомерных систем). Используя приведенную выше графическую интерпретацию критерия Найквиста и приведенный набор распределенных звеньев, разработана () процедура синтеза распределенных регуляторов.
В пятой главе «Реализация разработок на природных объектах» рассмотрены примеры реализации разработок на двух объектах: Куюлусском месторождении артезианских вод (Р. Казахстан) и Кисловодском месторождении лечебных минеральных углекислых вод. Дана краткая геолого-гидрогеологическая и техническая характеристика объектов, определены целевые функции, определяющие содержание задачи оптимизации.
Куюлусское месторождение предназначено для технического и питьевого снабжения водой промышленного центра Мангышлакской области г. Актау. Суммарный водоотбор из 30 артезианских скважин составляет 49000 м3/сут. Неблагоприятные метеорологические и климатические условия района в сочетании высоким водоотбором из водоносных горизонтов обусловили развитие нестационарного режима фильтрации с постоянной сработкой упругих запасов подземных вод. В результате эксплуатации динамические уровни в водоносных горизонтах снизились на величину более 100 м. (при предельно возможном снижении 250 м.), и продолжают снижаться. Учитывая систематическое истощение эксплуатационных запасов, в качестве основных показателей рассматривались гидродинамические. То есть, подбирался такой режим эксплуатации, который обеспечивал бы на любой момент времени одинаковое соотношение текущего положения динамического уровня, к предельно допустимому. Это соотношение оценивалось по зависимости (34).
Для построения системы управления, по данным ретроспективы, была произведена верификация модели, и уточнены емкостные и фильтрационные параметры водоносного горизонта, которые закладывались в модель. Оценка точности модели проводилась на ретроспективных данных периода гг. Сопоставление фактических и модельных понижений дано на рис.11.

Как следует из сопоставления, погрешность расчетов составляет 12%. Схема водозаборных скважин представляет собой линейную систему с шагом расположения 1,5 км. при радиусе влияния 2,5-3,0 км. Условие (31) выполнялось, и управление строилось по схеме сосредоточенных систем. В схеме использовался сосредоточенный ПИД-регулятор. Для его построения были определены частотные характеристики блоков. С этой целью на модели в одном из блоков был задан постоянный дебит и снята динамика изменения понижения уровня (DSi(t)), и полученная передаточная функция:
![]()
Амплитудно-фазовые характеристики ее изображены на рис. 12. Принимая запас устойчивости по фазе равным Dj = 0,75p, построен сосредоточенный ПИД-регулятор:
 .
.
Водозабор эксплуатировался 8000 суток. С 8060 сут. планируется увеличение суммарного дебита с 44000 м3/сут. до 49000 м3/сут. Процесс управления начат с t = 8000 сут. с шагом Dt = 30 сут. Результаты пошагового расчета нагрузок на блоки скважин представлены на рис. 13, откуда следует, что наращивание водоотбора в основном следует проводить по блокам 1 и 6. В результате, уже после третьего шага коэффициент пропорциональности k0 по всем блокам был одинаков, и если этот режим поддерживать, то оптимальность эксплуатации (по гидродинамике) гарантируется.
Рассмотрен пример управления гидродинамическим режимом Куюлусского месторождения с применением распределенного регулятора. Постановкой задачи предусматривалось поддержание постоянного контура с понижением равном 1,0 м. по границе параллельной линейному ряду эксплуатационных скважин на удалении 5,0км.
Для построения распределенного регулятора на вход эксплуатационных скважин задавалось воздействие по двум пространственным модам (по уравнению 39).
Рис.12. Амплитудно-частотные характеристики блока скважин.
На выходе фиксировались понижения уровня на интересующем контуре в точках, равноудаленных от добывающих скважин. Распределенный регулятор имеет вид:


Рис.13. Результаты управления эксплуатацией водозабора
(цифрами указанны номера блоков скважин).
По результатам моделирования установлены необходимые нагрузки на блоки скважин. Для центрального блока (блок № 5) график нагрузки изображен на рис.14.
 |
Рис.14. Управляющий дебит блока скважин № 5
Кисловодское месторождение лечебных минеральных углекислых вод предназначено для снабжения Федерального курорта и завода розлива гидроминеральными ресурсами. Основные требования к минеральным водам – соответствие кондициям ГОСТ «Воды минеральные лечебные и лечебно-столовые». Однако и в этом случае в качестве критериев оптимальности выбраны гидродинамические. Несмотря на то, что эксплуатация месторождения осуществляется в стационарном режиме, санитарно-гигиеническая обстановка в самом верхнем водоносном горизонте, содержащем грунтовые воды крайне неблагонадежна. Кроме того, рабочие горизонты характеризуются низкими фильтрационными свойствами и водообильностью скважин. К тому же между рабочими горизонтами и грунтовыми водами существует довольно тесная гидравлическая связь. В таких условиях в качестве критерия оптимальности принята величина предельно допустимого снижения уровня. Динамические уровни в рабочих горизонтах не должны быть ниже уровня грунтовых вод. Учитывая слабонапорный характер минеральных вод, это довольно жесткие ограничения, однако только при соблюдении их гарантируется нормальная санитарно-гигиеническая обстановка.
Прогнозирование динамики уровня подземных вод выполнялось на гидравлической модели. Уравнение связи имеет вид:
где: Hi0 – статическое положение уровня; Hi(t) – динамическое положение уровня на произвольный момент времени ( t ); ai, Qi – удельное гидравлическое сопротивление и дебит i-той скважины; Qj – дебит j-той скважины; bj – удельный коэффициент гидравлического взаимодействия j-той скважины с i-той; Vi – районные темпы изменения уровня подземных вод. Все коэффициенты определялись непосредственно по данным эксперимента в процессе мониторинговых наблюдений.
Для прогнозирования минерального состава в зависимости от нагрузок на скважины и климатических факторов, была построена многофакторная регрессионная модель первого порядка аналогичная по структуре гидравлической:
![]() где Mi0 – начальное значение минерализации в рассматриваемой скважине; ai, bj – коэффициенты уравнения регрессии; Vi – районные темпы изменения минерализации, связанные с многолетними изменениями климатических факторов.
где Mi0 – начальное значение минерализации в рассматриваемой скважине; ai, bj – коэффициенты уравнения регрессии; Vi – районные темпы изменения минерализации, связанные с многолетними изменениями климатических факторов.
Принцип решения задачи заключался в следующем. Для различных суммарных нагрузок, определялись дебиты каптажей, исходя из пропорциональности соотношения динамического и предельно возможного уровня. Далее для каждого варианта вычислялось значение минерализации в скважинах и смеси минеральных вод. Решение изображено на рис. 15. На графике выделен диапазон минерализации, соответствующий требованиям ГОСТ и соответствующие ему значения суммарной нагрузки на скважины. При оптимальном значении минерализации 2,3 – 2,5 г/дм3, соответствующие суммарные нагрузки должны находиться в диапазоне 720 м3/сут. до 860 м3/сут.
Рис. 15. Зависимость минерализации от отбора.
То есть, в зависимости от общего водоотбора (сезонные изменения) подаваемая на лечение минеральная вода должна быть различна по кондиционному составу, но в любом случае отвечать ГОСТу на минеральные воды.
Публикации по теме диссертации
Журналы ВАК:
1. Методика составления краткосрочных гидродинамических прогнозов работы водозабора Изв. ВУЗов "Геология и разведка". //Деп. ВИНИТИ 19.08.82, № 000-82 Деп. (в соавторе с ), 14 с.
2. О погрешности метода скважинной расходометрии. Изв. ВУЗов "Геология и разведка". // Деп. ВИНИТИ 30.08.83, № 000-83. Деп, 7 с.
3. Оптимизация режима эксплуатации подземных вод системой водозаборных сооружений. Изв. ВУЗов "Геология и разведка", 9с. Деп. ВИНИТИ 03.01.84, № 000-84
4. Гидрогеологические особенности строения третьего альбского водоносного горизонта Южного Мангышлака. Изв. ВУЗов, "Геология и разведка". //Деп. ВИНИТИ 16.03.84 Деп. (в соавторстве с ), 6 с.
5. Определение гидродинамических параметров при совместном опробовании водоносных горизонтов с различными статическими напорами. Изв. ВУЗов, "Геология и разведка". // Деп. ВИНИТИ 16.03.84 № 000 Деп. (в соавторстве с ), 11с.
6. Определение гидродинамических параметров водоносных горизонтов в условиях перетекания. Изв. ВУЗов «Геология и разведка» № 1, 2007, с. 31-34.
7. Проектирование распределенной системы управления режимами эксплуатации месторождения «Куюлус» «Мехатроника» № 4, 2008, 12 с. (в соавторе с ).
Статьи, тезисы:
8. Оптимизация режимов эксплуатации подземных вод. //Тезисы докладов 1 Всесоюзного съезда инженеров-геологов, гидрогеологов и геокриологов. Киев 1988г. ч.3. (в соавторстве с ).
9. Гидрогеологические исследования на стадии эксплуатационной разведки. // Тезисы докладов республиканского научно-технического совещания Ташкент, 1989г. с.33-36. (в соавторстве с ).
10. Фильтры водозаборных скважин уширенного контура. //Материалы международной научно-технической конференции "Проблемы и перспективы развития науки и техники в области механики, геофизики, нефти, газа, энергетики и химии Казахстана", г. Актау, 1996г.
11. Разработка математической модели месторождения подземных вод // Труды межреспубликанской научной конференции "Управление в социальных и технических системах". Кисловодск, 1998г. с. 171-178. (, ).
12. О несовершенстве гидрогеологических скважин // Деп. ВНИИТФ Российский федеральный ядерный центр. г. Снежинск, Препринт № 000, 1998г. 7с. (, ).
13. Разработка системы управления режимом эксплуатации водоносных систем с целью оптимизации водоотбора. // Труды межреспубликанской научной конференции "Управление в социальных и технических системах". Кисловодск, 1998г.
14. К вопросу о защите водозаборных скважин от вторжения радоновых вод. // Деп. ВНИИТФ Российский федеральный ядерный центр, г. Снежинск, Препринт № 000 от 01.01.2001г. 9с. (, ).
15. Методика определения параметров математических моделей геофильтрационных процессов. // Деп. ВНИИТФ Российский федеральный ядерный центр, г. Снежинск, 2001г., Препринт № 000, 5с. (, , ).
16. Обоснование рациональных режимов эксплуатации месторождений подземных вод. // Деп. ВНИИТФ Российский федеральный ядерный центр,
г. Снежинск, 2001г., Препринт № 000, 10с. (, , ).
17. Мониторинг подземных вод. //Тезисы докладов научно-практической конференции "Экология и энергосбережения" г. Пятигорск, 2001г. с 98-101.
( в соавторстве , , Шустваль Е. А., ).
18. Природно-экологические и техногенные факторы формирования режима подземных вод. //Тезисы докладов научно-практической конференции "Экология и энергосбережения" г. Пятигорск, 2001г. с 98-101. (в соавторстве , , Шустваль И. К., ).
19. Результаты эколого-гидрогеологических исследований Кабардинской межгорной впадины //Тезисы докладов участников IV международной конференции "Устойчивое развитие горных территорий: проблемы регионального сотрудничества и региональной политики горных районов" г. Владикавказ, 2001г. с 308. (в соавторстве , , ).
20. Верификация математических моделей геофильтрации // Сборник докладов конференции "Современные проблемы гидрогеологии и гидрогеомеханики"С-ПГУ, С-П. 2002г. с. 394-399. (в соавторстве , , ).
21. Методика определения величины инфильтрационного питания в водоносных горизонтах. // Деп. ВНИИТФ Российский федеральный ядерный центр, г. Снежинск, 2002г., Препринт № 000, 5с. (, , ).
22. Гидролитосферные процессы: системный анализ и проблема управления. Сборник докладов Всероссийской научной конференции «Управление и информационные технологии» С-Пб, СПбГЭТУ (ЛЭТИ), 2005г., том 1, с.57-62. ().
23. Проблемы эксплуатации месторождения подземных вод. Сборник докладов Всероссийской научной конференции «Управление и информационные технологии» С-Пб, СПбГЭТУ (ЛЭТИ), 2005г., том 2,с. 290-294 ().
24. Идентификация математических моделей водоносных систем на основе тестового моделирования. Межвузовский научный сборник. «Управление и информационные технологии». Пятигорск, 2005, с. 130-135.
25. Оценка мод5, с. 135-140.
26. Математическая модель Кисловодского месторождения минеральных вод. Межвузовский научный сборник. «Управление и информационные технологии». Пятигорск, 2006, с. 57-64.
27. Управление техногенными процессами в гидролитосфере. Межвузовский научный сборник. «Управление и информационные технологии». Пятигорск, 2006, с. 119-128.
28. Гидролитосферные процессы: системный анализ и проблема управления. // Сборник докладов Международной научной конференции «Системный синтез и прикладная синергетика». Пятигорск, 2006, с. 71-86. (в соавторстве ).
Монографии:
29. Техногенные процессы в подземных водах (биосферный подход, диагностика и управление) / Под ред. проф. - М.: Научный мир, 2003.-248 с.
30. , Першин распределенных регуляторов для систем управления гидролитосферными процессами – М.: Научный мир, 2008.– 257с.
Личный вклад автора в опубликованных в соавторстве работах:
[1, 8, 16] – обоснование структуры гидравлической модели, целевой функции, экспериментальные исследования; [4, 5] – опытно-фильтрационные работы, глубинная расходометрия, обобщение регионального материала, методики исследований; [7, 11] – построение и верификация математической модели объекта; [9] – формулировка задач и стадийности исследований; [12] - постановка задачи, гидравлические расчеты; [14] – идеи технологических методов решения задачи; [15, 20, 21] – идеи методических решений, моделирование; [17] – обоснование состава и задач гидрогеологического мониторинга; [18, 19] – анализ опыта эколого-гидродинамического районирования; [22, 23, 28] – постановка задачи, методических аспектов решения проблемы; [29] – экологические исследования, решение задач мониторинга, математическое моделирование природных объектов; [30] – разработка методических основ интерпретации результатов опытно-фильтрационных работ и глубинной скважинной расходометрии; принципов верификации математических моделей, математическое моделирование водоносных систем.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
