
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
5.4. Структура систем передачи Е1
Системы передачи Е1 получили широкое распространение в современных телекоммуникациях. Как было сказано выше, поток Е1 используется не только в первичной сети, но и во вторичных сетях. В связи с этим получили распространение несколько вариантов структуры систем передачи Е1. Наиболее общая схема системы передачи Е1 представлена на рис. 5.10.
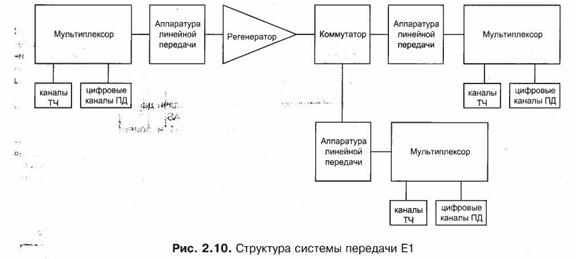
Рис. 5.10. Структура системы передачи Е1
Как видно из рис. 5.10, в состав цифровой системы передачи входят следующие компоненты: мультиплексор, аппаратура линейной передачи, регенераторы и коммутаторы. Мультиплексоры выполняют функцию загрузки и выгрузки каналов ТЧ и цифровых каналов передачи данных в поток Е1. Аппаратура линейной передачи выполняет функцию формирования линейного кода, цикловой и сверхцикловой структуры, а также функции мониторинга параметров ошибки, генерацию сигналов неисправностей и т. д. В реальной практике аппаратура линейной передачи обычно объединяется с мультиплексором в единых технических средствах. Регенераторы цифровых систем передачи выполняют функцию восстановления цифрового потока Е1 на протяженных системах передачи. Коммутаторы представляют собой сетевой элемент первичной сети, который выполняет коммутацию на уровне потоков Е1. Использование коммутаторов дает возможность оперативно реконфигурировать первичную сеть, осуществлять резервирование и сетевое планирование распределения ресурсов первичной сети.
Помимо приведенной схемы цифровой системы передачи, системы Е1 могут иметь структуру, стандартную для вторичных сетей.
6. Синхронная цифровая иерархия
6.1. Сравнение SDH и PDH
Основным недостаткам плезиохронной цифровой иерархии (PDH) являются:
-- затруднённый ввод/вывод цифровых потоков в промежуточных пунктах;
-- отсутствие средств сетевого автоматического контроля и управления;
-- многоступенчатое восстановление синхронизма требует достаточно большого времени;
Также можно считать недостатком наличие трёх различных иерархий.
Для обеспечения совместимости имеющихся вариантов PDH, а также для упрощения методов объединения (разделения) высокоскоростных цифровых потоков принят международный стандарт синхронной цифровой иерархии (SDH). Он позволяет синхронно объединять и разделять цифровые потоки со скоростями 155,520 • N, Мбит/с, где N = 1; 4; 16; 64 и т. д. Структура первичного синхронного цифрового потока (его скорость 155,520 Мбит/с) соответствует синхронному транспортному модулю 1-го порядка (STM-1), вторичного синхронного потока (со скоростью 4 • 155,520 = 622,080 Мбит/с) — модулю STM-4, третичного синхронного потока (его скорость 4•622,080=2488,320 Мбит/с) - STM-16 и т. д.
Таблица 6.1 – Скорости передачи иерархии SDH
Уровень SDH. | Скорость передачи, Мбит/с |
STM-1 | 155,520 |
STM-4 | 622,080 |
STM-16 | 2488,320 (2,5 Гбит/с) |
STM-64 | 9953,28 (10 Гбит/с) |
STM-256 | 39813,12 (40 Гбит/с) |
Иерархии PDH и SDH взаимодействуют через процедуры мультиплексирования и демультиплексирования потоков PDH в системы SDH.
Основным отличием системы SDH от системы PDH является переход на новый принцип мультиплексирования. Система PDH использует принцип плезиохронного (или почти синхронного) мультиплексирования, согласно которому для мультиплексирования, например, четырех потоков Е1 (2048 кбит/с) в один поток Е2 (8448 кбит/с) производится процедура выравнивания тактовых частот приходящих сигналов методом стаффинга. В результате при демультиплексировании необходимо производить пошаговый процесс восстановления исходных каналов. Например, во вторичных сетях цифровой телефонии наиболее распространено использование потока Е1. При передаче этого потока по сети PDH в тракте ЕЗ необходимо сначала провести пошаговое мультиплексирование Е1-Е2-ЕЗ, а затем – пошаговое демультиплексирование ЕЗ-Е2-Е1 в каждом пункте выделения канала Е1.
В стандарте SDH используется совершенно другой, нежели в PDH, принцип временного объединения; он более сложен и близок к способам, принятым в ЭВМ. Зато при этом достигается непосредственный доступ к любому из объединяемых сигналов, что позволяет обеспечить автоматическое управление сетью, например оперативно распределять информационные потоки по направлениям.
Сравнивая технологию SDH с технологией PDH, можно выделить следующие особенности технологии SDH:
• предусматривает синхронную передачу и мультиплексирование. Элементы первичной сети SDH используют для синхронизации один задающий генератор, как следствие, вопросы построения систем синхронизации становятся особенно важными;
• предусматривает прямое мультиплексирование и демультиплексирование потоков PDH, так что на любом уровне иерархии SDH можно выделять загруженный поток PDH без процедуры пошагового демультиплексирования. Процедура прямого мультиплексирования называется также процедурой ввода-вывода;
• опирается на стандартные оптические и электрические интерфейсы, что обеспечивает лучшую совместимость оборудования различных фирм-производителей;
• позволяет объединить системы PDH европейской и американской иерархии, обеспечивает полную совместимость с существующими системами PDH и, в то же время, дает возможность будущего развития систем передачи, поскольку обеспечивает каналы высокой пропускной способности для передачи ATM, MAN, HDTV и т. д.;
• обеспечивает лучшее управление и самодиагностику первичной сети. Большое количество сигналов о неисправностях, передаваемых по сети SDH, дает возможность построения систем управления на основе платформы TMN. Технология SDH обеспечивает возможность управления сколь угодно разветвленной первичной сетью из одного центра.
6.2. Особенности построения синхронной иерархии
Выделим общие особенности построения синхронной иерархии:
-- первая – поддержка в качестве входных сигналов каналов доступа только трибов (прим. от trib, tributary - компонентный сигнал, подчинённый сигнал или нагрузка, поток нагрузке) PDH и SDH;
-- вторая – трибы должны быть упакованы в стандартные помеченные контейнеры, размеры которых определяются уровнем триба в иерархии PDH;
-- третья – положение виртуального контейнера может определяться с помощью указателей, позволяющих устранить противоречие между фактом синхронности обработки и возможным изменением положения контейнера внутри поля полезной нагрузки;
-- четвёртая - несколько контейнеров одного уровня могут быть сцеплены вместе и рассматриваться как один непрерывный контейнер, используемый для размещения нестандартной полезной нагрузки;
Характерной особенностью модулей STM-N является то, что все они имеют одинаковый цикл передачи, называемый фреймом. Фрейм (frame) имеет длительность 125 мкс и достаточно сложную структуру, которую удобно представить в виде двумерной матрицы. Для STM-1 она имеет формат 9 строк на 270 однобайтовых (8-битовых) столбцов (рис. 6.1).
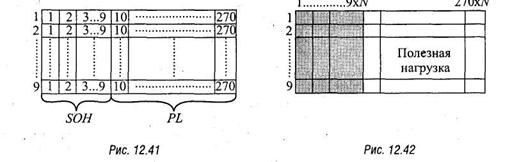
Рис. 6.1. Рис. 6.2.
Структуру можно развернуть в виде одномерной путем поочередной передачи каждой строки — слева направо и сверху вниз (построчная развертка). Тогда за время 125 мкс будет передано 270x9 байт или 270x9x8 бит, что соответствует тактовой частоте передачи синхронного модуля STM-1, равной fT.S1 = (270 • 9 • 8 / 125)106 = кбит/с. Фрейм состоит из двух групп полей. Первая группа формата 9x9 байт занимает первые 9 столбцов и образует поле секционных заголовков SOH (section overhead). Остальные столбцы всех строк с 10 по 270 образуют поле полезной нагрузки PL (path load). Верхние три строки секционного заголовка отводят под заголовок регенераторной секции RSOH, нижние пять строк SOH — для заголовка мультиплексной секции MS0H. Размер RSOH— 3x9 = 27 байт, размер MSOH — 5x9 = 45 байт. Заголовок RSOH несет информацию о принадлежности транспортного модуля, его маршруте, сигналах служебной связи, телеконтроля и т. п., которые необходимы для обеспечения нормальной эксплуатации линейного тракта, а также для сигнализации и управления при автоматическом переключении на резервный тракт. Шесть байт в начале 1-й строки RSOH отведено для размещения цифрового синхросигнала (frame alignment word — FAM). Заголовок MSOH используется в тех пунктах, где производится сборка или разборка модуля. В нем приводятся сведения о том, каким образом сформирована полезная нагрузка модуля, из каких информационных потоков произведено мультиплексирование, где размещены данные о каждом входном потоке и т. п. Кроме RSOH и MSOH в составе SOH имеется еще одна строка данных (четвертая) форматом 1x9 байт, которая называется указателем административных блоков (AU-n PTR). Ее назначение будет пояснено ниже.
6.3. Сборка модулей STM-N
Мультиплексирование STM-1 в STM-N может осуществляться как каскадно (т. е. поочередно с одного уровня иерархии на другой): 4х1 → 4, 4х4 → 16, 4х16 → 64, 4х64 → 256, так и непосредственно (одной ступенью преобразования) по схеме N:1 → N, где N=4, 16, 64, 256. При этом для схемы непосредственного мультиплексирования используется чередование байт (рис. 6.2).
Например, если шестнадцать STM-1 каналов (0, 1, 2, … 13, 14, 15 или в шестнадцатеричном исчислении 0, 1, 2, … D, E, F) на входе мультилпексора STM-16 генерируют шестнадцать байт-последовательностей: b0b0b0…,b1b1b1…, b2b2b2…, …, bDbDbD…, bEbEbE … bFbFbF …, то в результате мультиплексирования на выходе STM-16 формируется байт-последовательность b0b1b2…bDbEbFb0b1b2… .
Фактически так просто удается мультиплексировать только тогда, когда все STM-1 имеют одинаковую структуру полезной нагрузки, если нет, то нужно, чтобы соблюдались некоторые так называемые правила бесконфликтного объединения. В стандарте G.708 (версия 1988 г.) требовалось чтобы все STM-1 принадлежали к одной из трех категорий:
1 – AU-3 (разного типа), несущие С-3 в качестве полезной нагрузки;
2 – AU-n (разного типа), но несущие тот же тип TUG-2 в качестве полезной назгрузки;
3 – различные типа TUG-2 в качестве полезной нагрузки.
В том же варианте предпоследней версии (1993 г.) и затем в последней версии стандарта G.707 в связи с различиями схем мультиплексирования ETSI и SONET/SDH эти правила объединения STM-N еще более ужесточаются.
Если при формировании модуля STM-N используется каскадное мультиплексирование, то оно осуществляется по схеме чередования групп байтов, причем число байтов в группе равно кратности мультиплексирования предыдущего каскада. Например, если формирование STM-16, происходит по двухэтапной схеме: 4хSTM-1 → STM-4 и 4хSTM4 → STM-16, то на первом этапе используется мультиплексирование по схеме с байт-интерливингом, а на втором – по схеме с интерливингом по группам, состоящим из четырех байтов. Если предположить, что на вход каждого из четырех STM-4, питающих STM-16, поступают последовательности {bij} (здесь подстрочные индексы i = 0,1,2,3 – номера входов, а надстрочные индексы j = 1, 2, 3, 4 – номера мультиплексоров STM4), то процесс формирования можно представить следующей схемой:
Отметим, что при временном группообразовании происходит дополнительное изменение структуры секционного заголовка SOH-N: в нем не только в N раз увеличивается объем данных, но и появляются дополнительные биты — указатели, размещаемые на «пустых» позициях SOH-1. С их помощью определяется характер мультиплексирования (непосредственный или каскадный), а также место размещения мультиплексируемых каналов в структуре фрейма STM-N.
6.4. Правила образования транспортного модуля STM-1
Для совмещения плезиохронных и синхронных сетей в стандарте SDH предусмотрены правила образования транспортного модуля STM-1 из плезиохронных цифровых потоков со скоростями 2,048; 34,368 и 139,264 Мбит/с. Они реализуются с помощью специализированных мультиплексоров. Если такой мультиплексор (он называется add/drop multiplexer, или ADM) установить в пункте регенерации синхронной цифровой сети, то этот пункт становится узлом ответвления (добавления) плезиохронных сигналов 2,048; 34,368 и 139,264 Мбит/с (El, ЕЗ, Е4).
Формирование STM-1 из плезиохронных потоков PDH и обратно имеет следующие особенности.
Во-первых, оно выполняется не для всех скоростей цифровых потоков, соответствующих европейскому и американскому стандартам PDH, а только для некоторых, называемых трибами. К ним относятся потоки El, ЕЗ и Е4 европейской иерархии и потоки T1 (1,544 Мбит/с), T2 (6,312 Мбит/с) и T3 (44,736 Мбит/с) американской иерархии PDH. Остальные потоки должны формироваться с помощью мультиплексоров PDH.
Во-вторых, поскольку фрейм STM-1 можно представить в виде некоторого контейнера стандартного размера (см. рис. 6.1), имеющего внутреннюю емкость для размещения полезной нагрузки PL, то с целью упрощения доступа к трибам PDH их целесообразно размещать в типовые контейнеры меньшего размера (нижнего уровня), а сами контейнеры вкладывать друг в друга, а затем и в STM-1 по принципу матрешки, т. е. методом последовательных вложений.
Каждый контейнер имеет заголовок, где собраны все необходимые для управления и маршрутизации параметры, и внутреннюю емкость для размещения полезной нагрузки. По типоразмеру контейнеры (C) делят на 4 уровня (Cl, С2, СЗ и С4), которые соответствуют уровням PDH. При добавлении к С трактового заголовка (path overhead, POH), который содержит служебную информацию и позволяет осуществлять контроль качества прохождения триба «из конца в конец», формируется виртуальный контейнер (VC) соответствующего уровня (VC-n; n = 1,..., 4).
Третья особенность формирования STM-1 состоит в том, что на каждый VC заводится указатель (pointer, PTR), содержащий фактический адрес начала VC на карте поля, отведенного под полезную нагрузку в составе VC более высокого уровня. Совместно они образуют трибный блок (tributary unit, TU), при этом указателю дают имя указатель трибного блока (TUPTR) n-го порядка: TU-n = TU-n PTR + VC-n. В результате мультиплексирования нескольких трибных блоков образуется группа трибных блоков (tributary unit group, TUG).
Для размещения в поле STM-1 виртуальных контейнеров высокого уровня (VC-3 или VС4) формируется административный блок (administrative unit, AU), который содержит соответствующий VС и указатель административного блока (AU PTR), например, AU-4 = VС4 + AU-4 PTR. Один или несколько AU-n образуют группу административных блоков (administrative unit group, AUG).
Общая схема мультиплексирования PDH трибов по технологии SDH, рекомендованная Международным союзом электросвязи (МСЭ) в 1993 г. (Rec. G.-709. ITU-T), показана на рис. 6.3.
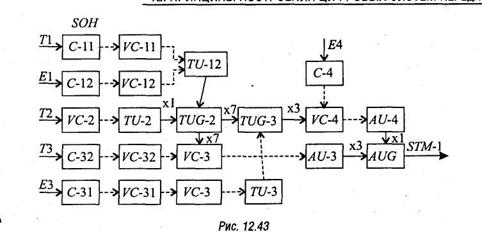
Рис. 6.3.
Здесь пунктирные стрелки означают операцию выравнивания скоростей, вызванную добавлением указателей PTR, а знак «xq», q = 3 или 7, — операцию мультиплексирования (временного группообразования) q цифровых потоков. Реализация мультиплексора SDH по схеме рис. 3 оказывается весьма сложной, поэтому многие фирмы-производители применяют более простые варианты, учитывая преобладание Т или Е потоков. Так, Европейский институт стандартизации в области связи (ETSI) рекомендует для Европы вариант мультиплексора SDH/PDH (рис. 4), где используются только потоки El, ЕЗ и Е4 (ETS 300.147).
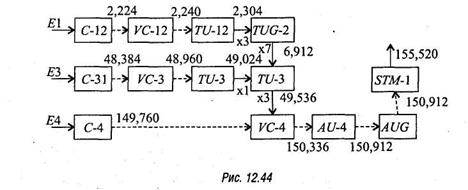
Рис. 6.4.
Для примера рассмотрим по этой схеме вариант формирования модуля STM-1 из потока трибов El.
6.5. Процесс формирования модуля STM-1 из потока трибов Е1
Пример логического формирования модуля STM-1 из триба Е1 приведен на рисунке 6.5, на котором введены следующие обозначения:
С-n – контейнеры уровня n;
VC-n – виртуальные контейнеры уровня n
TU-n – трибные блоки уровня n (3).
TUG-n – группа трибных блоков уровня n (2,3);
AU-n – административные блоки уровня n (3,4);
AUG-n – группа административных блоков;
STM-n – синхронный транспортный модуль.
![]()
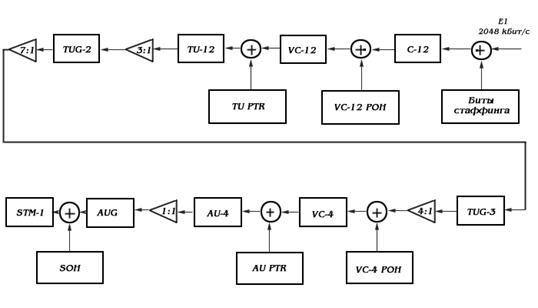
Рис. 6.5. Пример логического формирования модуля STM-1 из триба Е1
Следя за логической схемой формирования нужно иметь ввиду, что фактически физическое положение отдельных элементов, например указателей, не соответствует их месту в логической схеме, кроме этого используется ряд резервных, или фиксирующих, элементов, играющих роль «наполнителей», битовое содержание которых или не играет роли, или зарезервировано на будущее в схеме управления, или служит элементов выравнивания SDH фрейма.
![]() На этом рисунке – означает операцию конкатенации (физической или логической пристыковки) заголовка или указателя к другим элементам схемы мультиплексирования SDH, а символ треугольника означает операцию мультиплексирования с соответствующим коэффициентом, указанным внутри.
На этом рисунке – означает операцию конкатенации (физической или логической пристыковки) заголовка или указателя к другим элементам схемы мультиплексирования SDH, а символ треугольника означает операцию мультиплексирования с соответствующим коэффициентом, указанным внутри.
Представленная схема наглядна и достоверна на описательном уровне, однако не всегда отражает реально осуществляемые физические преобразования и для более глубокого понимания нуждается в некоторых пояснениях и замечаниях.
Шаг 1. Формируется контейнер C-12, наполняемый из канала доступа, питаемого трибом Е1. Поток Е1 (2,048 Мбит/с) для удобства последующих рассуждений лучше представить в виде цифровой 32 байтной последовательности, циклически повторяющейся с частотой 8 кГц (частота повторения фрейма STM-1). Это так, если учесть, что 2048000/8000=256 бит или 32 байта.
К этой последовательности в процессе формирования С-12 возможно добавление выравнивающих бит, а также других фиксирующих, управляющих и упаковывающие бит (условно показанных блоком «биты стаффинга»). Емкость С-12 должна быть больше 32 байт, фактически она в зависимости от режима преобразования VC-12 в TU-12 будет больше или равна 34 байтам.
Различают два тида битового стаффинга:
- плавающее выравнивание предусматривает не только компенсацию разницы в скоростях загружаемых цифровых потоков, но и ее вариацию. В этом случае полезная нагрузка в контейнере может гибко увеличиваться и уменьшаться, давая возможность грузки в контейнер потока с вариацией скорости. Для обеспечения плавающего выравнивания в нескольких частях контейнера предусматриваются поля переменного стаффинга. Периодически повторяемые индикаторы стаффинга определяют, является ли бит в поле переменного стаффинга информационным или битом выравнивания и подлежит уничтожению в процессе выгрузки;
- фиксированное выравнивание предусматривает добавление в состав контейнера дополнительных битов для того, чтобы его размер соответствовал стандартному. В отличие от процесса плавающего выравнивания, где стаффинговые биты идентифицируются индикаторами, в процессе фиксированного выравнивания индикаторы не используются. Место расположения стаффингового поля определено структурой контейнера.
В процессе загрузки и выгрузки цифрового потока в синхронный транспортный модуль обычно используются оба вида выравнивания.
Шаг 2. К контейнеру C-12 добавляется маршрутный заголовок VC-12 POH длиной в один байт (обозначаемый V5) с указанием маршрутной информации, используемой в основном для сборки статистики прохождения контейнера.
В результате формируется виртуальный контейнер размером 35 байт.
Шаг 3. Добавление указателя TU-12 PTR длиной в один байт к виртуальному контейнеру VC-12, превращает его в трибный блок TU-12 длиной 36 байтов, который удобнее представить в виде двумерной таблицы (фрейма) 9х4 байт, учитывая, что формат окончательной структуры (модуля STM-1) также представляется в виде фрейма 9х270 байтов (9 строк на 270 столбцов). Эквивалентное представление фрейма в виде последовательного поля будем называть кадром.
Шаг 4. Последовательность трибных блоков TU-12 в результате байт-мультиплексирования 3:1 превращается в группу трибных блоков TUG-2 с суммарной длиной последовательности (кадра) 108 байтов (36х3 = 108). Логически структуру TUG-2 также удобнее представить в виде фрейма 9х12 байтов.
Замечание. Фактически при мультиплексировании TU-12 в TUG-2 указатели TU-12 PTR располагаются отдельно от виртуальных контейнеров в начале фрейма.
Шаг 5. Последовательность TUG-2 подвергается повторному байт-мультиплексированию 7:1, в результате которого формируется группа трибных блоков TUG-3 – кадр длиной х7) байтов, соответствующий фрейму 9х84 байта.
Замечание. Фактически TUG-3 соответствует фрейму 9х86, так как в начале добавляются два столбца (поле 2х9 байтов), состоящие из поля индикации нулевого указателя – NPI и фиксированного пустого поля (наполнителя) – FS. В результате формула образования TUG-3 принимает вид: TUG-3 = 7xTUG-2 + NPI + FSTUG-3, где индекс TUG-3 используется для отличия FS, применяемого в различных структурах. Таки образом, кадр TUG-3 имеет длину 774 байта (7х108+3+15 = 774), что соответствует фрейму 9х86 байтов.
NPI и FS используются для согласования нагрузки. Кроме этого, при мультиплексировании модулей STM-1 в STM-N и выше на этих позициях размещаются указатели, с помощью которых определяется характер мультиплексирования (непосредственный или каскадный), а также место размещения мультиплексируемых каналов в структуре фрейма STM-N.
Шаг 6. Полученная последовательность снова байт-мультиплексируется 3:1, в результате чего формируется последовательность блоков TUG-3 с суммарной длиной 2х3=2322) байта.
Шаг 7. Происходит формирование виртуального контейнера верхнего уровня VC-4 в результате добавления к полученной последовательности маршрутного заголовка POH длиной 9 байтов, что приводит кадру длиной в 2331 байтов (2322+9=2331).
Замечание. Фактически VC-4 соответствует фрейму 9х261, структура которого состоит из одного столбца (1х9 байтов) POH, двух столбцов фиксированного пустого поля FS и трех блоков TUG-3, полученных в результате мультиплексирования. В результате формула образования VC-4 принимает вид: VC-4 = 3xTUG-3 + POHVC-4 + FSVC-4. Таким образом, последовательность (кадр) VC-4 имеет длину 2349 байтов (3х774 + 9 + 2х9), что соответствует фрейму 9х261 байт.
Шаг 8. На последнем этапе происходит формирование синхронного транспортного модуля STM-1. При этом сначала формируется AU-4 путем добавления указателя AU-4 PTR длиной 9 байтов, а затем группа административных блоков AUG путем формального, в данном конкретном случае, мультиплексирования 1:1 административного блока АU-4.
К группе AUG добавляется секционный заголовок SOH, что окончательно формирует синхронный транспортный модуль STM-1, представляемый в виде кадра длиной 2430 байтов, или в виде фрейма 9х270 байтов, что при частоте повторения в 8 кГц соответствует скорости передачи 155,52 Мбит/с.
Фрейм состоит из двух групп полей. Первая группа формата 9х9 байт занимает первые 9 столбцов и образует поле секционных заголовков SOH (section overhead). Остальные столбцы все строк с 10 по 270 образуют поле полезной нагрузки PL (path load). Верхние строки секционного заголовка отводят под заголовок регенераторной секции RSOH, нижние пять строк SOH – для заголовка мультиплексной секции MSOH. Размер RSOH – 3х9 = 27 байт, размер MSOH – 5х9 = 45 байт. Заголовок RSOH несет информацию о принадлежности транспортного модуля, его маршруте, сигналах служебной связи, телеконтроля и т. п., которые необходимы для обеспечения нормальной эксплуатации линейного тракта, а также для сигнализации и управления при автоматическом переключении на резервный тракт. Шесть байт в начале 1-й строки RSOH отведено для размещения цифрового синхросигнала (frame alignment word - FAM). Заголовок MSOH используется в тех пунктах, где производится сборка или разборка модуля. В нем приводятся сведения о том, каким образом сформирована полезная нагрузка модуля, из каких информационных потоков произведено мультиплексирование, где размещены данные о каждом входном потоке и т. п.
6. 6. Назначение заголовков и указателей
Заголовок маршрута РОН выполняет функции контроля параметров качества передачи контейнера. Он сопровождает контейнер по маршруту следования от точки формирования до точки расформирования. Структура и размер заголовка РОН определяются типом соответствующего контейнера. Следовательно, различаются два основных типа заголовков:
--- заголовок маршрута высокого уровня (High-order РОН - НО-РОН), используемый для контейнеров VC-4/VC-3;
--- заголовок маршрута низкого уровня (Low-order РОН - LO-POH), используемый для контейнеров VC-3/VC-2/VC-1.
Указатели выполняют в технологии SDH две основные функции:
• обеспечение быстрого поиска и доступа к нагрузке;
• обеспечение процедур выравнивания и компенсации рассинхронизации передаваемых потоков.
Первая функция указателей является наиболее важной, поскольку именно с ней связано основное преимущество технологии SDH – отсутствие необходимости пошагового мультиплексирования/ демультиплексирования. Указатели административных блоков AU PTR и блоков нагрузки TU PTR обеспечивают прямой доступ к загруженному в синхронный транспортный модуль потоку на любом уровне (рис.6.6). Как видно из рис.6, в системах передачи SDH используются два типа указателей - административной (AU-PRT) и трибутарной групп (TU-PTR). Указатели образуются байтами Н заголовков маршрута.
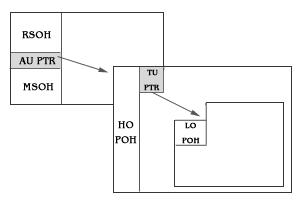
Рис.6.6. Механизм организации прямого доступа к нагрузке.
6.7. Особенности технической реализации синхронных муьлтиплексоров
Техническая реализация синхронных мультиплексоров (SMUX) имеет ряд особенностей. Первая – все они дополняются высокоскоростными коммутаторами, которые осуществляют маршрутизацию, объединение и перегруппировку (сортировку) виртуальных контейнеров КС на основе использования информации в маршрутном заголовке РОH соответствующего контейнера. В зависимости от возможностей коммутатора синхронный мультиплексор может работать в режиме оконечного терминала или промежуточного линейного терминала ввода/вывода (add-drop multiplexer) — ADM. В режиме Т мультиплексор может вводить каналы, т. е. коммутировать их со входа трибного интерфейса на линейный выход, или выводить каналы, т. е. коммутировать их с линейного входа на выход трибного ин терфейса. В режиме ADM терминал выполняет функции некоего сетевого узла, к которому подключаются информационные потоки от нескольких направлений передачи, при этом обеспечивается возможность быстрого и гибкого перераспределения (ввода/вывода) трибных потоков и линейных сигналов с одного направления в другое. Например, ADM иерархии STM-64 , имеющий скорость выходного потока 10 Гбит/с, может коммутировать PDH-трибы Е1, ЕЗ и Е4, а также SDH-трибы, соответствующие STM-1, -4, -16.
терфейса. В режиме ADM терминал выполняет функции некоего сетевого узла, к которому подключаются информационные потоки от нескольких направлений передачи, при этом обеспечивается возможность быстрого и гибкого перераспределения (ввода/вывода) трибных потоков и линейных сигналов с одного направления в другое. Например, ADM иерархии STM-64 , имеющий скорость выходного потока 10 Гбит/с, может коммутировать PDH-трибы Е1, ЕЗ и Е4, а также SDH-трибы, соответствующие STM-1, -4, -16.
Второй особенностью SMUX является то, что все они имеют оптический линейный вход/выход, т. е. содержат оптические приемо-передатчики и соответствующие устройства восстановления формы и амплитуды цифрового сигнала, передаваемого на большие расстояния по волоконно-оптическим линиям. Это позволяет при необходимости использовать SMUX в качестве линейного регенератора.
Третья особенность SMUX заключается в том, что все блоки, связанные с приемом, передачей и обработкой цифрового оптического сигнала, имеют 100 %-ное резервирование или защиту по схеме 1 + 1 с целью повышения надежности. Это позволяет строить новые, более надежные конфигурации (структуры) волоконно-оптических сетей передачи с использованием оборудования SDH-систем. При обрыве одного светодиода или оптического кабеля в целом производится автоматическое переключение на другое направление (резервный маршрут), при этом перерыв связи составляет не более 1 — 10 мс.
В качестве примера на рис. 6.7 показана конфигурация сети по схеме «4-волоконная шина с защитой» (2 кабеля, 4 световода).
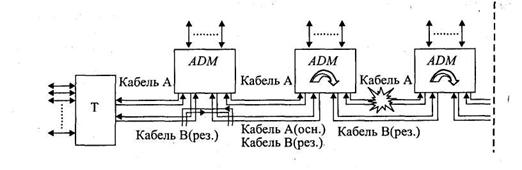
Рис. 6.7.
Здесь мультиплексное оборудование собрано по варианту терминала Т на оконечном пункте и по варианту мультиплексора вставки-выделения ADM на промежуточных пунктах. В нормальном режиме прием и передача ведутся по основному кабелю А, а при его обрыве поврежденная секция автоматически переключается на резервный кабель В. Рис. 6.8 отражает построение сети по схеме «2-волоконная двунаправленная кольцевая сеть с защитой сегментов» (1 кабель, 2 световода).
Здесь мультиплексор каждой станции укомплектован по варианту АDМ. В нормальном режиме прием и передача ведутся по двум волокнам основного маршрута (например, для информационного обмена между станциями А и D — это маршрут через станции Е и F). При обрыве кабеля на одной из секций кольца (например, Е и F) производится автоматическое переключение потерянных трибных потоков на передачу в противоположном направлении — по резервному маршруту (через станции В, С, D) и система полностью восстанавливает свою работоспособность.
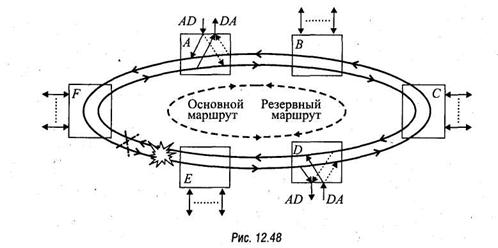
Рис. 6.8.
6. 8. Методы контроля четности
В системе SDH используется метод контроля параметров ошибки без отключения канала, который получил название метода контроля четности (Bit Interleaved Parity - ВIР). Этот метод, также как и CRC, является оценочным, но он дает хорошие результаты при анализе систем передачи SDH. Алгоритм контроля четности достаточно прост (рис.6.9). Контроль четности выполняется для конкретного блока данных цикла в пределах групп данных по 2, 8 и 24 бита (BIP-2, BIP-8 и В1Р-24 соответственно). Эти группы данных организуются в столбцы, затем для каждого столбца рассчитывается его четность, т. е. четное или нечетное количество единиц в столбце. Результат подсчета передается в виде кодового слова на приемную сторону. На приемной стороне делается аналогичный расчет, сравнивается с результатом и делается вывод о количестве ошибок четности. Результат сравнения передается в направлении, обратном передаче потока.
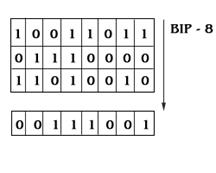
Рис. 6.9.Алгоритм контроля чётности.
Метод контроля четности является оценочным, поскольку несколько ошибок могут компенсировать друг друга в смысле контроля четности, однако этот метод дает приемлемый уровень оценки качества цифровой системы передачи. Поскольку технология SDH предусматривает создание секционных заголовков и заголовк пути, метод контроля четности дает возможность тестирования параметров цифровой системы передачи от секции к секции и от начала до конца маршрута. Для этого используются специальные байты (см. выше) в составе заголовков SОН и РОН. Например, количество ошибок, обнаруженно в канале В3 передается в байте G1 РОН VC-4 следующего цикла. На рис.6.10 представлена схема посекционного мониторинга параметра ошибки BIP. Используемые для контроля четности байты связанные с ними участки цифровой системы передачи приведены в табл.5.1.
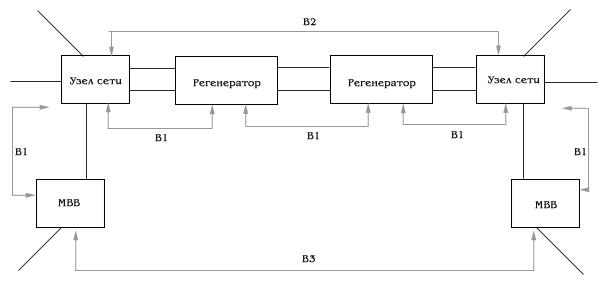
Рис.6.10.Посекционный мониторинг параметров цифровой передачи.
Байт | Заголовок | Длина | Секция мониторинга |
B1 | RSOH | BIP - 8 | STM - 1 |
B2 | MSOH | BIP - 24 | STM - 1 без RSOH |
B3 | POH VC - 3/4 | BIP - 8 | VC - 3/4 |
V5 | POH VC - 1/2 | BIP - 2 | VC - 1/2 |
Таблица 6.2.Байты, используемыедля контроля чётности и участки SDH.
6.9 Резервирование
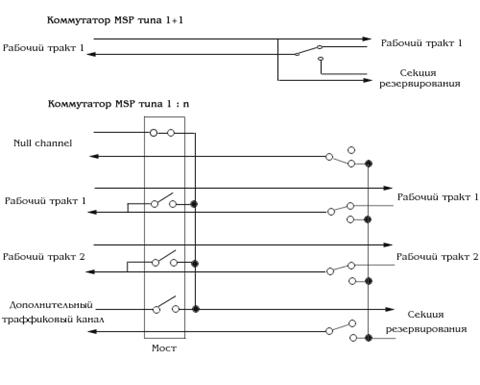
К современной цифровой первичной сети предъявляются повышенные требования в части параметров ее надежности. В связи с этим современные первичные сети строятся с использованием резервных трактов и коммутаторов, выполняющих оперативное переключение в случае неисправности на одном из каналов. В этом случае в состав системы передачи включаются цепи резервирования мультиплексорной секции (Multiplex Section Protection - MSP). Как было показано выше, в сети SDH осуществляется постоянный мониторинг параметров ошибки (процедура контроля четности BIP) и параметров связности. В случае значительного ухудшения качества передачи в мультиплексорной секции выполняется оперативное переключение (APS) на резервную мультиплексорную секцию. Это переключение выполняется коммутаторами. По типу резервирования различаются коммутаторы APS с архитектурой 1+1 и 1:n (рис.6.11).
Для управления резервным переключением используются байты К1 и К2 секционного заголовка. В байте К1 передается запрос на резервное переключение и статус удаленного конца тракта. В байте К2 передается информация о параметрах моста, используемого в APS с архитектурой 1:n, данные по архитектуре MSP и сообщения о неисправностях, связанные с APS. Различные варианты архитектуры MSP используются в различных схемах резервирования. Наибольшее распространение имеют две схемы, непосредственно связанные с кольцевой топологией сетей SDH - схема "горячего резервирования" (рис.6.2а) и схема распределенной нагрузки (рис.6.11). В первом случае трафик передается как в прямом, так и в резервном направлении. В случае повреждения происходит реконфигурация и создается резервный канал. В схеме распределенной нагрузки половина графика передается в прямом, половина - в обратном направлении. В этом случае при возникновении неисправности происходит переключение на уровне ресурсов.
Согласно ITU-T G.841 время резервного переключения не должно превышать 50 мс.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
