
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В сложных микропроцессорных системах для хранения больших объемов информации используют внешние запоминающие устройства, конструктивно не объединенные с блоками ЭВМ и реализуемые на магнитных лентах, дисках или барабанах.
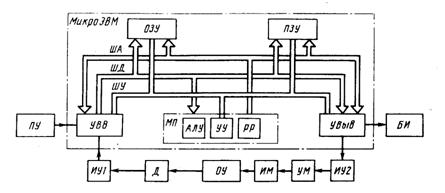
Рисунок 58.1 – Структурная схема микропроцессорной системы управления
Устройства ввода и вывода информации предназначены для ввода обрабатываемой информации в МП, вывода и наглядного представления обработанной информации. Для ввода информации используют пульты управления с клавиатурой, выключателями, переключателями и т. д., а также пишущие машинки и телетайпы с перфоприставками, оптические считывающие устройства и др. Для вывода информации применяют бумажные ленты с цифровым и буквенно-цифровым текстом, графиками, а также дисплеи, экраны, табло, микрофильмы и др.
Совокупность информационных каналов микроЭВМ называется шинами. Шины выполняют в виде пучка проводов или печатной схемы и подразделяют на 3 вида: адресные, данных и управления.
Шина адресная ША предназначена для передачи адреса ячейки памяти с данными или командой от микропроцессора к ОЗУ, ПЗУ, УВв и УВыв.
Шина данных ШД - это 2-направленная линия для обмена данными между отдельными компонентами микроЭВМ.
Шина управления ШУ предназначена для передачи тактовых, синхронизирующих сигналов, а также информации о состоянии (статусе) компонентов микроЭВМ.
Объединение различных компонентов микропроцессорной СУ должно проводиться с учетом характера и временных параметров сигналов на стыках между компонентами. Чтобы сигналы были совместимыми, применяют вспомогательные устройства, называемые интерфейсными. Эти устройства можно разделить на 2 группы. Первая группа обеспечивает подключение ОЗУ, ПЗУ, УВв и УВыв к шинам МП и решает задачи синхронизации и управления шинами, а также выборки компонентов, обеспечивающих своевременную передачу данных между МП и выбранным компонентом. Вторая группа обеспечивает "стыковку" микроЭВМ с внешними компонентами (например, с периферийными устройствами, каналами передачи данных, контроллерами) и преобразование внешних сигналов в сигналы, совместимые с сигналами на шинах, а также обратное преобразование. Так, если датчики Д имеют аналоговые выходные сигналы, интерфейсное устройство ИУ1 может представлять собой АЦП. В то же время для управления работой механизма ИМ (например, серводвигателем ПД генератора) могут использоваться аналоговые сигналы. В этом случае интерфейсное устройство ИУ2 представляет собой ЦАП.
Вопрос 59
Схема контролю пуску потужних приймачів електроенергії в системі «Гієпас».
Контроль включения мощных потребителей
Микро-ЭВМ LSG 821 контролирует процесс включения мощных потребителей с целью предотвращения их произвольного пуска.
Посредством шести каналов микро-ЭВМ может обеспечить контроль за шестью потребителями. Два первых канала предусмотрены для потребителей с переменной нагрузкой.
При помощи одного из этих каналов микро-ЭВМ осуществляет контроль только одного мощного потребителя на судне - подруливающего устройства. Второй канал микро-ЭВМ использует для пуска электроприводов машинного отделения по системе «Stand by».
Подключение подруливающего устройства. Обратимся к рисунку 59.1. Пунктирной линией на схеме ограничены элементы микро-ЭВМ LSG 821.
После нажатия на кнопку S, расположенную на посту управления подруливающим устройством, срабатывает реле K2 (установленное там же). При замыкании контакта реле на неинвертирующий вход операционного усилителя DA1 поступает положительный потенциал. Это приводит к появлению на выходе DA1 логической «1», которая поступает на двунаправленный буферный усилитель D8.

Рисунок 59.1 – Схема подключения подруливающего устройства и система «Stand by»
Таким образом, срабатывание реле K2 приводит к тому, что на микро-ЭВМ поступает сигнал о предстоящем подключении подруливающего устройства. Микро-ЭВМ определяет суммарную мощность нагрузки судовой электростанции с учетом мощности электродвигателя подруливающего устройства (значение этой мощности записано в памяти микро-ЭВМ). Затем микро-ЭВМ определяет значение резервной мощности и, если соблюдено условие DР < Рmin, дает команду на запуск резервного дизеля и подключение генератора.
При условии DР < Рmin срабатывает реле K1 периферийной соединительной платы РАР 401/
Реле K1 своим контактом подает питание к реле KЗ, которое установлено на посту управления подруливающим устройством. Реле K3, в свою очередь, одним из своих контактов шунтирует контакт реле K1, а другим - дает разрешение на пуск электродвигателя.
После пуска электродвигателя срабатывает реле K1 подруливающего устройства (на рисунке оно не показано). Это реле обесточивает реле K2 и подает положительный потенциал на неинвертирующий вход операционного усилителя DА2, что приводит к подаче на микро-ЭВМ сигнала о включении подруливающего устройства. Таким образом происходит прекращение запроса о включении подруливающего устройства и поступает информация о пуске электродвигателя.
В течение процесса запроса о включении подруливающего устройства происходит мигание светодиода «Bow thruster». После включения подруливающего устройства этот светодиод перестает мигать и горит постоянно.
Одновременно с этим с регистра D3 поступает сигнал на бесконтактный ключ на операционном усилителе DА4, который подключает лампу индикации. Лампа индикации установлена на посту управления подруливающим устройством.
Если в течение процесса запроса микро-ЭВМ фиксирует значение DР > Рmin, то дает разрешение на включение подруливающего устройства без подключения резервного генератора.
После срабатывания реле КЗ (расположенного на посту управления подруливающим устройством) его состояние не зависит от команд микро-ЭВМ. При этом отключение любого количества работающих генераторов - в силу случайных и неслучайных факторов - не приведет к образованию запрета на включение электродвигателя. Возможно даже включение электродвигателя при работе только одного генератора, и что незамедлительно вызывает обесточивание судна. Для устранения такой возможности следует изменить принципиальную схему включения электродвигателя путем введения запрета на его включение при условии отключения любого из работающих генераторов.
Мощность, потребляемая электродвигателем подруливающего устройства, зависит от разворота лопастей, является случайной величиной и имеет переменный характер.
Для того, чтобы предотвратить отключение резервного генератора при малой нагрузке (то есть при DР > Рmin), микро-ЭВМ подключает канал «No DG Stop».
Если значение DР > Рmin сохраняется в течение времени, превышающего продолжительность периода выдержки при остановке дизеля, то появляется следующая индикация: «Stop time finished», «DG stoppage» и «Diesel underload».
Пуск электроприводов машинного отделения по системе «Stand by». После обесточивания судна включение всех необходимых электроприводов машинного отделения происходит автоматически по системе «Stand by».
Схема включения системы «Stand by» аналогична схеме включения подруливающего устройств. Реле Д700 подключено к схеме обнаружения обесточивания судна («Blackout») и в нормальном режиме питание на него не поступает (см. рис. 4.7). Клеммы XV: 2, б относятся к схеме обнаружения «Blackout» (см. рис. 3.2).
При обесточивании судна реле К100 получает питание. Одним из своих контактов это реле размыкает цепь питания реле времени К101. Реле К101, в свою очередь, замыкая свои контакты, подготавливает цепи запроса и разрешения Х7: 8, 9 микро-ЭВМ LSG 821.
После подключения генератора по системе «Blackout» реле К100 снова обесточивается. При этом одним из своих контактов реле К100 подает питание к реле времени К101. Контакты реле времени К101 размыкают соответствующие цепи после заданного времени выдержки. Это время составляет 150 с.
Другим своим контактом реле К100 замыкает цепь запроса микро-ЭВМ. Это приводит к подаче сигнала о предстоящем включении станции управления электроприводов машинного отделения.
В дальнейшем процесс протекает аналогично процессу подключения подруливающего устройства. После включения второго генератора срабатывает реле К2 периферийной соединительной платы РАР 401. Замыкание контакта реле К2 приводит к подаче питания к реле К102. Последнее, в свою очередь, своим контактом замыкает цепь между клеммами 32, 33 станции управления электроприводами машинного отделения по системе «Stand by». Замыкание клемм 32, 33 приводит к автоматическому включению электроприводов машинного отделения по заданной временной программе. По истечении времени, определенного значением выдержки реле К101, происходит размыкание цепи запроса микро-ЭВМ и цепи питания реле К102.
Вопрос 60
СУ СЕЕС типу "Гієпас". Об'єм автоматизації, основні елементи, структура
Микропроцессорная система управления «Гиепас» многофункциональна. Она осуществляет пуск и остановку вспомогательных дизелей, синхронизацию, подключение и отключение резервных генераторов, распределяет активную и полную мощность между параллельно работающими генераторами. Она же поддерживает в сети постоянное значение частоты, контролирует процесс подключения мощных потребителей электроэнергии, защищает генераторы от токов короткого замыкания и перегрузки, а также от несимметричных режимов работы. Микропроцессорная система управления не допускает значительных отклонений напряжения и чатоты от номинальных значений. Она отключает второстепенные потребители электроэнергии при перегрузках по току и отклонениях частоты. Помимо того, микропроцессорная система осуществляет постоянный контроль за исправностью входящих в нее элементов.
Микропроцессорная система управления «Гиепас» состоит из четырех микро-ЭВМ DSG 822 и одной микро-ЭВМ LSG821.
Микро-ЭВМ DSG 822 («Dieselsteuergerat» микро-ЭВМ управления дизель-генератором) предназначены для управления дизель-генераторными агрегатами и осуществления контроля над ними.
Микро-ЭВМ LSG 821 («Lastwachtersteuergerat» – микро-ЭВМ управления режимами работы) предназначена для управления режимами работы и контроля за работой электроэнергетической системы.
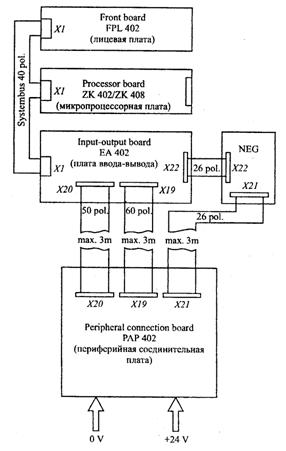
Каждая из микро-ЭВМ DSG 822 имеет пять плат: микропроцессорную плату ZK 408, лицевую плату FPL 402, плату ввода-вывода EA 402, плату блока питания NEG и периферийную соединительную плату PAP 402 (рис. 60.1).
Платы ZK 408, FPL 402, EA 402 и NEG 415 каждой микро-ЭВМ DSG 822 смонтированы в одном корпусе, который располагается на лицевой части соответствующей панели ГРЩ. Периферийная соединительная плата PAP 402 размещена на задней части той же панели.
Первые три платы каждой микро-ЭВМ DSG 822 соединены между собой системной шиной Х1. Плата ввода-вывода соединена двумя плоскими кабелями Х20, Х19 с периферийной соединительной платой и одним плоским кабелем Х22 – с блоком питания. Блок питания связан плоским кабелем Х21 с периферийной соединительной платой (рис.1).
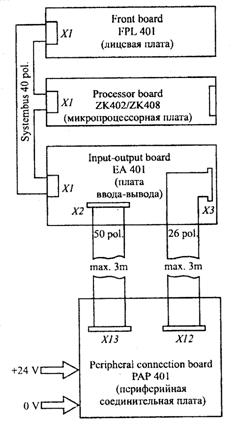
Микро-ЭВМ LSG 821 состоит из четырех плат: микропроцессорной платы ZK 408, лицевой платы FPL 401, платы ввода-вывода EA 401 и периферийной соединительной платы PAP 401 (рис. 60.2).
Платы ZK 408, FPL 401 и EA 401 микро-ЭВМ LSG 821 смонтированы в одном корпусе, который располагается на лицевой части одной из панелей ГРЩ. Периферийная соединительная плата размещена рядом на этой же панели ГРЩ.
Рисунок 60.1 – Структурная схема микро – ЭВМ DSG 822 |
Рисунок 60.2 – Структурная схема микро – ЭВМ LSG 821 |
Все микро-ЭВМ через клеммы периферийных соединительных плат связаны между собой (рис. 60.3).
На этом рисунке Х12 это клеммы плат РАР 402, Х9 – клеммы платы РАР 401. Структурная схема СУ СЭЭС «Гиепас» представлена на рисунке 3.
Рисунок 60.3 – Структурная схема СУ СЭЭС «Гиепас»
1. Микро-ЭВМ DSG 822
1.1. Микропроцессорная плата ZK 408
Состав. На этой микропроцессорной плате расположены следующие элементы: микропроцессор, запоминающее устройство, регистры, двунаправленные буферные усилители, логические элементы, триггеры, внешний генератор тактовых импульсов, дешифраторы и таймеры.
1.2. Лицевая плата FPL 402
Лицевая плата FPL 402 объединяет элементы коммутации и индикации. На передней части лицевой платы расположены кнопки (некоторые из них снабжены светодиодами), переключатель, дисплей и светодиоды-индикаторы. Внешний вид лицевой платы приведен на рисунке 60.5.
|
Рисунок 60.5 – Лицевая плата FPL 402 |
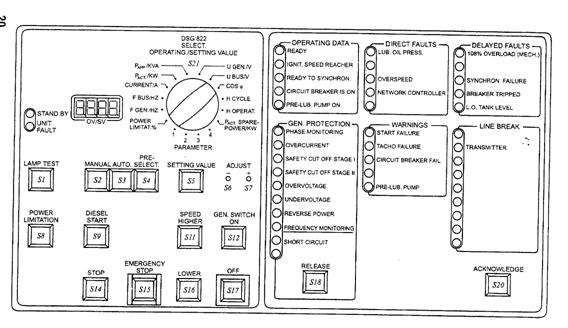
Всего на лицевой плате семнадцать кнопок и один переключатель. В некоторые кнопки вмонтированы светодиоды.
Помимо светодиодов, вмонтированных в кнопки, на лицевой плате также присутствуют отдельные светодиоды, служащие для индикации состояния микро-ЭВМ, дизеля, генератора, для сигнализации о срабатывании защиты генератора и возникновении аварийной ситуации.
В рабочем состоянии микро-ЭВМ горит светодиод «Stand by». При наличии повреждения загорается светодиод «Unit fault».Когда дизель и генератор находятся в рабочем состоянии, светятся следующие светодиоды:
«Ready» – готов;
«Ready to synchron» – готов к синхронизации и т. д.
В том случае, когда срабатывает защита генератора, начинает светиться один из следующих светодиодов:
«Under voltage» – низкое значение напряжения;
«Reverse power» – обратная мощность и т. д.
1.3. Плата ввода-вывода ЕА 402
Плата ввода-вывода ЕА 402 служит для приема и обработки двоичных сигналов, поступающих от микропроцессорной платы ZK 408, и аналоговых сигналов – от периферийной соединительной платы РАР 402.
Плата ЕА 402 соединена с микропроцессорной платой посредством системной шины Х1, состоящей из шины данных, адресной шины и шины управления. Между ZK 408 и ЕА 402 происходит взаимный обмен информацией по шине данных. На основе обмена данными микро-ЭВМ управляет судовой электроэнергетической установкой.
Также плата ЕА 402 соединена двумя плоскими кабелями Х20, Х19 с периферийной соединительной платой РАР 402 и одним плоским кабелем с блоком питания NEG.
1.4. Периферийная соединительная плата РАР 402
Периферийная соединительная плата РАР 402 служит для соединения микро-ЭВМ между собой. К этой плате подключены различные органы управления электроэнергетической установкой, на нее поступают сигналы о напряжениях и токах генератора, сигналы с датчиков дизеля. Также на плате РАР 402 расположены электромагнитные реле, служащие для осуществления контроля и управления ЭЭУ.
Питание к плате РАР 402 поступает через выпрямитель от источника постоянного тока напряжением 24 В.
На плате РАР 402 расположены два датчика напряжения и три датчика тока.
2. Микро-ЭВМ LSG 821
2.1. Микропроцессорная плата ZK 408
Состав и функции этой платы такие же, как и в микро-ЭВМ DSG 822, за исключением различий в диапазоне адресов микросхем памяти в программе.
2.2. Лицевая плата FPL 401
Лицевая плата служит для коммутации и индикации. На ней располжены кнопки, светодиоды, дисплей. Состав лицевой платы показан на рисунке 60.6.
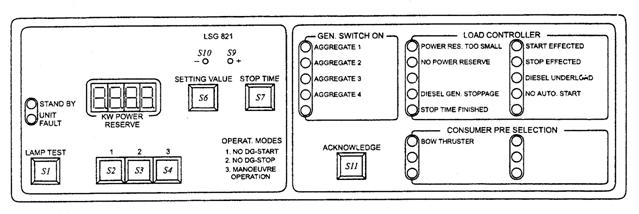
Рисунок 60.6 – Лицевая плата FPL 401
2.3. Плата ввода-вывода ЕА 401
Служит для приема и обработки сигналов: двоичных с микропроцессорной платы ZK 408, дискретных и аналоговых – с периферийной платы РАР 401.
2.4. Периферийная соединительная плата РАР 401
Ее функции аналогичны функциям платы РАР 402
3. Режимы работы микро-ЭВМ DSG 822.
Микро-ЭВМ DSG 822 может функционировать в двух режимах работы: ручном и автоматическом. Режим выбирают нажатием на соответствующую кнопку «Manual» для ручного и «Auto» для автоматического.
В ручном режиме пуск и остановку дизеля осуществляют путем нажатия на соответствующие кнопки – «Start» или «Stop». Подобным образом в этом режиме управления вручную осуществляют синхронизацию, подключение генератора к шинам ГРЩ и распределение активной мощности. При обесточивании судна автоматический пуск дизеля не происходит.
В автоматическом режиме операции по запуску и остановке дизеля, синхронизация, подключение генератора к шинам ГРЩ и распределение активной мощности выполняется автоматически.
Системы контроля и защиты дизеля и генератора функционируют независимо от выбранного режима работы.
4. Назначение микро-ЭВМ LSG 821
Микро-ЭВМ LSG 821 служит для осуществления контроля за нагрузкой судовой электростанции. При помощи линий связи эта микро-ЭВМ постоянно получает информацию о нагрузке каждого работающего генератора.
Помимо контроля за нагрузкой судовой электростанции микро-ЭВМ LSG 821 может обеспечивать включение шести наиболее мощных установок, имеющих контакторные станции.
На дисплее микро-ЭВМ предусмотрена индикация восьми рабочих величин, а также кодов и параметров заданных величин и аварийных сигналов. Светодиоды микро-ЭВМ позволяют контролировать включение кнопок управления и генераторных автоматов, наблюдать за состоянием дизелей и генераторов, а также следить за работой подруливающего устройства.
Вопрос 61
Система управління і захисту генераторів типу "Сінпол". Об'єм автоматизації, основні елементи.
1. Назначение системы
Устройство защиты генераторов разработано фирмой ABB специально для судовых трехфазных сетей. Оно осуществляет защиту и контроль генератора и подключенных к сборной шине устройств. Устройство формируется на базе электронных элементов и имеет гальваническую развязку от сети за счет подключения через трансформаторы напряжения и тока.
При разработке устройства особое внимание уделялось его надежности с тем, чтобы в случае неисправности, обеспечить целенаправленное отключение в электроэнергетической установке, сохраняя питание наиболее ответственных потребителей.
В судовые электроэнергетические установки, как правило, входит несколько генераторов. Каждый генератор комплектуется своим устройством защиты.
Для контроля, к устройству подводятся трехфазное напряжение генератора и двухфазное напряжение сборных шин, а также сигналы трансформаторов тока, включенных в трехфазный токопровод генератора. Для питания устройства применяется напряжение 220В переменного тока или же 24В постоянного тока. Возможно применение обоих напряжений одновременно.
В связи с применением устройства, генераторный выключатель не нуждается во встроенных механизмах защиты. Для его расцепления необходима только катушка минимального реле на 220В постоянного тока, которая получает питание от устройства СИНПОЛ.
Ниже приведены наиболее важные функции устройства:
1. Защита от короткого замыкания (КЗ), функционирует также при исчезновении питающего напряжения устройства.
Защита от повторного включения в связи с ручным взводом после срабатывания.
Селективное отключение при КЗ.
2. Защита от перегрузки, осуществляемая посредством определения перегрузки по току. В специальном исполнении предусматривается отключение при плавно изменяющейся частоте.
3. Защита от обратной мощности.
4. Отключение второстепенных потребителей при перегрузке.
5. Синхронизация генератора с сетью.
6. Автоматическая подгонка частоты подключаемого агрегата.
7. Контроль повышенного и пониженного напряжения.
8. Двухступенчатый контроль пониженной частоты.
9. Контроль симметричности тока.
10. Контроль цепей трансформаторов тока на обрыв.
11. Собственный контроль напряжения питания.
12. Возможность измерения мощности также при несинусоидальной форме напряжения и тока, специально для тиристорной нагрузки. Выходной сигнал ± 10B постоянного тока для прибора магнитоэлектрической системы.
13. Непрерывное запоминание и индикация всех функций срабатывания.
14. Обеспечение катушки минимального расцепителя генераторного выключателя напряжением питания 220В постоянного тока с поддержанием этого питания при провалах напряжения во время КЗ. Отключение автомата происходит непосредственно от минимального расцепителя, цепь питания которого смонтирована в устройстве.
15. Вывод сигналов на внешнюю сигнализацию и для обработки в системе АПС.
16. Распределение активной нагрузки большого числа параллельно работающих агрегатов с автоматическим регулированием частоты по астатической или статической характеристике.
Конструктивно прибор представляет из себя 19-дюймовый блок со штыревыми разъемами и монтажной печатной платой для соединения отдельных модулей.
Блок (корпус) СМА 50 стандартного исполнения.
Карта синхронизации СМА 32. Выравнивание фаз.
Карта синхронизации СМА 33. Выравнивание частот.
Карта измерения мощности СМА 34.
Карта защиты от КЗ СМА 35, для селективного отключения генератора в случае КЗ.
Карта предельных значений СМА 36, выдает сигнал при достижении предельной величины:
предельная величина срабатывания при токовой перегрузке для отключения генераторного выключателя;
предельная величина срабатывания при токовой перегрузке для отключения второстепенных потребителей;
предельная величина срабатывания по обратной мощности для отключения генераторного выключателя.
Карта предельных значений СМА 36-2 для плавно изменяющейся частоты (валогенераторные установки).
Карта контроля СМА 37 со следующими функциями контроля и сигнализации:
1) контроль напряжения питания;
2) контроль цепей трансформаторов тока на обрыв;
3) контроль понижения напряжения;
4) контроль повышенного напряжения;
5) сигнализация КЗ с запоминанием сигнала;
6) сигнализация токовой перегрузки с запоминанием сигнала;
7) сигнализация обратной мощности с запоминанием сигнала;
8) сигнализация уровня снижения частоты A1 с запоминанием сигнала;
9) сигнализация уровня снижения частоты А2 с запоминанием сигнала;
10) контроль отключения второстепенных потребителей при токовой перегрузке с запоминанием сигнала;
11) сигнализация превышения напряжения с запоминанием сигнала;
12) сигнализация пониженного напряжения без запоминания сигнала;
13) кнопка сброса памяти сигналов неисправности.
Модуль преобразования напряжения генераторов и сети СМА 39
Токовый модуль СМА 40, включает в себя преобразователи тока, выходные реле, а также цепь питания катушки минимального расцепителя генераторного выключаВт, 220В постоянного тока с накопителем энергии для кратковременного удержания);
Карта распределения активной нагрузки параллельно работающих дизель-генераторных агрегатов СМА 51.
Карта регулирования частоты дизель-генераторных агрегатов СМА 52 (одна на все генераторы).
2. Описание карты синхронизации СМА 32
Для подключения генератора на сеть обе системы должны быть синхронизированы. Для синхронизации используются фазы L1и L2 со стороны генератора и сети.
Для проверки синфазности применяются два независимых метода измерения. Это позволяет значительно увеличить защиту от ошибочной синхронизации.
Первый метод - это метод измерения биений. Определяется разность синусоидальных напряжений сети и генератора.
Результирующее напряжение, при совпадении мгновенных значений в момент синхронизма, равно нулю. Однако, при этом способе может возникнуть ошибка измерения, если амплитуды напряжений сети генератора неодинаковы.
Второй метод - это метод регистрации перехода через нуль. В момент перехода через нуль напряжения сети подготавливается быстродействующее аналоговое запоминающее устройство, которое отслеживает и запоминает генераторное напряжение.
При подобном методе, разность амплитуд синронизируемых напряжений существенной роли не играет. Сигнал, сформированный на базе обоих методов, в нужный момент подается на пороговый выключатель.
Разрешение синхронизации зависит, кроме того, от разности частот генератора и сети (частоты скольжения). Частота скольжения непрерывно измеряется и регулируется до установленного значения. Это значение может быть изменено согласно протоколу настройки. Увеличение установленного значения частоты скольжения позволяет ускорить синхронизацию. В этом случае, генераторный выключатель с пружинным приводом соответственно должен быть быстродействующим
Генераторные выключатели фирмы ABB отвечают этим условиям и поэтому наилучшим образом годятся для быстрой синхронизации.
Величины напряжения сети и генератора контролируются двумя пороговыми элементами с возможностью настройки. Достижение генераторным напряжением установленной величины (приблизительно 80% номинального), по истечении выдержки времени (около 2 с), формирует еще одно условие синхронизации.
Снижение сетевого напряжения относительно установленной величины (приблизительно на 15 %) вызывает запрещение синхронизации.
Команда на включение генераторного выключателя формируется в виде импульса и длится около двух секунд.
Угол опережения момента совпадения фаз синхронизируемых напряжений при включении генератора выбирается по диаграмме, приведенной в протоколе настройки. Причем, угол опережения выбирается таким образом, чтобы включение происходило несколько раньше момента совпадения фаз.
При достижении синфазности генератора и сети загораются светодиоды G и L . G - для контроля одновременности перехода синронизируемых напряжений через нуль, L — для контроля совпадения фаз по напряжению биений.
Эта сигнализация свидетельствует о достижении момента, благоприятного для включения генератора по фазе.
Если при вводе в эксплуатацию генератор включается впервые, требуется поступить следующим образом:
I) отключить с шин все источники (генераторы или питание с берега)
2) включить генераторный выключатель проверяемого генератора через цепь БЛЭК-АУТ (синхронизация при этом не работает/
3) на карте СМА 32 должны загореться светодиоды G и L .
Если горит один светодиод или вообще ни одного, проверить и привести в порядок последовательность фаз контролируемых напряжений на устройстве СИНПОЛ.
До загорания светодиодов G и L проверить монтаж и правильность подключения кабелей (при включенном генераторном выключателе).
4) проверить направление вращения поля на шинах.
Все вышеизложенные мероприятия должны непременно соблюдаться при вводе генераторов в эксплуатацию.
Включение и тест-режим.
Светодиод М сигнализирует включение генераторного выключателя. Если же микровыключатель В из среднего положения установлен в нижнее или верхнее положение теста, процесс синхронизации протекает обычным образом, а светодиод М загорается при формировании сигнала включения генераторного выключателя.
Выходное реле, однако, не срабатывает и генераторный выключатель не может быть включен (тест-режим). Тест-режим позволяет провести функциональный контроль синхронизации.
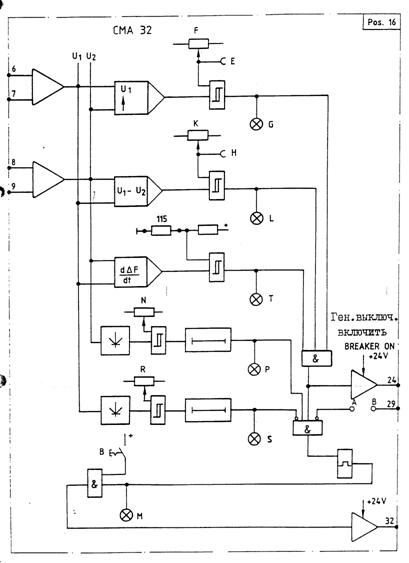
Рисунок 61.1 – Структурная схема карты синхронизации типа СМА-32
Элементы фронтальной планки:
В - выключатель установки тест-режима;
D - гнездо - О В;
Е - гнездо контроля перехода через нуль синхронизируемых напряжений;
F - потенциометр настройки предельных значений элемента контроля перехода через нуль;
G - светодиод контроля условия совпадения перехода через нуль синхронизируемых напряжений;
Н - гнездо контроля биений;
К - потенциометр установки предельных значений по каналу частоты биений;
L - светодиод контроля совпадения фаз по каналу частоты биений;
М - светодиод индикации команды включения генераторного выключателя;
N - потенциометр установки предельных значений элемента контроля напряжения генератора;
Р - светодиод индикации условия «напряжение генератора ³ 80% номинальной величины»;
R - потенциометр настройки элемента контроля понижения напряжения сети;
S - светодиод индикации условия «напряжение сети £15% номинального значения»;
Т — светодиод контроля соответствия частоты скольжения заданной величине
Вопрос 62
Типова структурна схема автоматизованої СЕЕС та її функції.
Средства автоматизации обеспечивают выполнение наиболее характерных для любой судовой электростанции операций.
- пуск и остановку генераторных агрегатов (по команде оператора или автоматически при изменении нагрузки электростанции);
- синхронизацию генераторов и включение их на параллельную работу;
- пропорциональное распределение мощности между параллельно работающими генераторами;
- стабилизацию напряжения и частоты вращения генераторных агрегатов;
- контроль параметров в процессе работы и защиты генераторов и первичных двигателей.
Рисунок 62.1. Типовая функциональная схема автоматизации СЭС
На рис. 62.1 представлена функциональная схема автоматизации судовой электростанции, отражающая типовой состав оборудования автоматизированной СЭС переменного тока и поясняющая взаимосвязь генераторных агрегатов и автоматических устройств. В данном случае в состав судовой электростанции входят три дизель-генератора и один валогенератор. Всё устанавливаемое оборудование автоматизации разбито по выполняемым функциям: контроля и управления (CONTROL), защиты (PROTECTION), сигнализации и мониторинга (MONITORING).
Функции контроля и управления обеспечиваются устройствами, воздействующими на органы управления первичным двигателем генераторного агрегата и систему самовозбуждения генератора.
В данном случае каждый дизель-генераторный агрегат снабжён датчиком частоты вращения (tacho) и устройством дистанционного автоматического управления первичным двигателем (engine controller), обеспечивающим автоматизацию процессов его пуска и остановки. Каждый генератор снабжён автоматическим регулятором напряжения (AVR).
Для обеспечения параллельной работы синхронных генераторов применяются устройства автоматической синхронизации (synchronizing) и устройства автоматического распределения активной (load sharing) и реактивной (Var load sharing) нагрузок.
Устройства автоматической синхронизации (synchronizing) обеспечивают автоматическое выполнение условий синхронизации и подключение генераторов к шинам главного распределительного щита посредством дистанционного воздействия на генераторные автоматические выключатели.
Устройства автоматического распределения активной нагрузки (load sharing) воздействуют на регулятор частоты вращения первичного двигателя (governor), изменяя подачу топлива, а устройства автоматического распределения реактивной нагрузки (Var load sharing) воздействуют на автоматический регулятор напряжения (AVR), изменяя ток возбуждения генераторов посредством потенциометра с электроприводом (motor potentiometer).
Защиты генераторов (protection) обеспечивают отключение генераторов от шин в случае короткого замыкания (shirt circuit), перегрузки генераторов по току (over current), обратной мощности (reverse power) и потери возбуждения генератором (excitation loss). В случае срабатывания любой из защит обеспечивается одновременное срабатывание аварийно-предупредительной сигнализации (alarm indication).
Помимо этого, устройства автоматизации СЭС обеспечивают дистанционный контроль основных параметров вырабатываемой электроэнергии: напряжения (voltage monitoring), частоты (frequency monitoring), потребляемой мощности электростанции (power monitoring), отклонений частоты (frequency deviation), контроль сопротивления изоляции сети (insulation monitoring). Для контроля и управления частотой сети используется устройство управления с электронным таймером (master time controller). Контроль текущего значения частоты производится при помощи эталонного кварцевого генератора. При необходимости корректировки частоты устройство одновременно воздействует на все регуляторы частоты генераторных агрегатов (governor) через устройства распределения активной нагрузки (load sharing).
Устройство автоматизации запуска и остановки резервных генераторов (load depending start & stop) позволяет по установкам оператора автоматически включать резервные генераторные агрегаты при существенном возрастании нагрузки или изменении параметров СЭС и отключать их при снижении нагрузки. С целью минимизации времени обесточивания судна в аварийных ситуациях применяется система контроля наличия напряжения на шинах ГРЩ (blackout monitoring), которая обеспечивает подключение к шинам в течение нескольких секунд любого резервного генератора, напряжение которого достигает в данный момент 90% номинального.
Устройство управления загрузкой судовой электростанции (power reference) используется при параллельной работе с береговой сетью с целью управления мощностью, потребляемой судовыми потребителями электроэнергии от береговой сети.
Вопрос 63
Класифікація електроустаткування за умовами безпеки; мережа з ізольованою нейтраллю, її аналіз, мережа із заземленою нейтраллю, аналіз; освідотство електроустановок.
Каждая СЭЭС характеризуется, структурой, схемой, состоянием, режимами работы, параметрами и показателями.
Состояние СЭЭС может быть нормальное или аварийное.
Состояние СЭЭС считается нормальным, когда энергосистема обеспечивает производство электроэнергии нормального качества от основных или резервных источников и распределение ее по судовым потребителям при работе их в любом необходимом сочетании.
Состояние СЭЭС считается аварийным, когда энергосистема обеспечивает производство электроэнергии требуемого качества от аварийных источников и распределение ее только по некоторым судовым потребителям (ответственным или аварийного назначения); аварийным также считается состояние, сопровождаемое недопустимым для нормальной работы отклонением показателей качества электроэнергии, отключением части работающих источников или потребителей.
Режим работы СЭЭС может быть установившимся или переходным. При установившемся режиме СЭЭС работает при постоянных параметрах или медленных их изменениях в заданных пределах. При переходном режиме происходит быстрое изменение параметров, когда система переходит от одного установившегося режима к другому.
Электрические сети выполняют изолированными от корпуса судна. Исключение составляют электрические сети маломерных судов (небольших буксиров, катеров, мотоботов и др.), на которых допускается применение корпуса судна в качестве второго провода при напряжениях до 30 В переменного и 55 В постоянного тока.
Передачу электроэнергии постоянного и 1-фазного переменного тока осуществляют 2-проводными линиями электропередачи, а 3-фаз-ного тока - 3-проводными (редко 4-проводными) линиями электропередачи. В последнем случае линия электропередачи состоит из 3-х фазных и 1-го нулевого провода и применяется на плавсредствах (дебаркадерах, брандвахтах и др.), получающих электроснабжение с берега.
Требования Регистра к системам распределения электроэнергии на судах
В судовых установках допускается применение следующих систем распределения электрической энергии переменного тока:
1) напряжением до 1000 В (трехфазная, трехпроводная изолированная);
2) дополнительно для напряжений до 500 В включительно:
- трехфазная, четырехпроводная изолированная;
- однофазная, двухпроводная изолированная;
- однофазная, однопроводная с использованием корпуса судна в качестве обратного провода только для напряжения до 30 В;
В судовых установках постоянного тока:
1) двухпроводная изолированная;
2) однопроводная (только для напряжения до 50 В) с использованием корпуса судна) в качестве обратного провода:
- на судах валовой вместимостью мене 1600 рег. т,
- на судах валовой вместимостью 1600 peг. т и более для ограниченных и местно заземленных систем (например, в стартерных системах двигателей внутреннего сгорания);
Использование других систем является в каждом случае предметом специально рассмотрения Регистром.
Классификационные общества некоторых зарубежных стран разрешают применение однопроводной системы без существенных ограничений. На танкерах использовать однопроводную систему запрещено
Режим работы нейтрали судовых электрических систем
Наибольшее распространение для распределения электроэнергии трехфазного тока на судах получила схема с изолированной нейтралью.
Трехпроводные схемы с компенсированной нейтралью имеют повышенные свойства безопасности. Один из возможных вариантов такой схемы представлен на рисунке 63.1 б. В этой схеме компенсация осуществляется за счет дросселя. Согласно правилам ряда иностранных классификационных обществ на судах разрешается применение трехпроводных систем с глухим заземлением нейтрали (рисунок 63.1 в).
Четырехпроводные схемы с изолированной нейтралью (рисунок 1 г) не получили широкого распространения, хотя и позволяют подключить к сети потребители разных напряжений. Это можно объяснить следующим образом:
- возникают несимметричные нагрузки, хотя по требованию Регистра нагрузки отдельных фаз не должны различаться более чем на 15%;
- необходимость использовать в таких схемах четырехжильного кабеля, имеющего несимметричную нагрузку жил;
- нецелесообразность (по эксплуатационным соображениям) объединения в единую электрическую сеть силовых потребителей с бытовыми и осветительными, к изоляции которых в этом случае надо предъявлять такие же требования, как и к силовым системам более высокого линейного напряжения.
|
Рисунок 63.1 – Режимы работы нейтрали судовых электрических систем |

При любых видах схем распределения электроэнергии и способах их исполнения потребители ответственного назначения получают питание следующим образом:
- по отдельным фидерам от ГРЩ (якорное устройство, пожарные и осушительные насосы, гирокомпас, холодильные установки грузовых трюмов, щиты основного освещения, аварийный распределительный щит в нормальных условиях);
- по двум фидерам от ГРЩ и АРЩ (компрессоры и насосы забортной воды спринклерной системы, щит радиостанции, пульты систем автоматизации ответственных устройств);
- по отдельно проложенным фидерам от ГРЩ (рулевое устройство, щит навигационных устройств);
- по двум фидерам от ГРЩ и ближайшего группового щита (пульты систем автоматизации главных механизмов);
- от фидера, питающего вспомогательный механизм (пульт сисытем автоматизации этого механизма);
- по трем отдельным фидерам – от ГРЩ или АРЩ (питаемый через ГРЩ), от ближайшего группового щита и от аккумуляторной батареи (аварийная электростанция и другие особо ответственные потребители).
Вопрос 64
Алгоритм виведення СЕЕС з обезструмленного стану.
Обесточивание СЭЭС (судна) оценивается ее системой управления по исчезновению напряжения на шинах ГРЩ и отключению всех генераторных автоматических выключателей.
При обесточивании судна система управления СЭЭС должна обеспечивать экстренный пуск минимум двух РДГ или заданного их числа в СЭЭС с тремя и четырьмя ДГ.
Первый РДГ, достигший номинальной частоты вращения, получает команду включения на шины ГРЩ. Если он по каким-либо причинам не включится на шины ГРЩ, он будет; блокирован и следующий РДГ получит аналогичную команду. Пуск нескольких РДГ предусматривают для предотвращения неудачного пуска одного из них в условиях обесточивания судна и надежного обеспечения быстро возрастающей нагрузки после ликвидации обесточивания.
Сигнал на включение АВ РДГ формируется при выполнении следующих условий: отсутствует блокирование РДГ (нет аварии и переключатель управления РДГ находится в положении «Работа»); частота вращения РДГ превышает ее минимально допустимое значение; нет команды на включение АВ других ГА. При этом возможно подключение на обесточенные шины ГРЩ только одного РДГ, который первым вышел на заданную частоту вращения. Сигнал на включение его АВ подается в течение определенного времени (0,5 с), по истечении которого включение АВГ блокируется. Если напряжения на шинах ГРЩ нет, то представляется возможность для подключения следующего из запустившихся РДГ.
Граф-схема алгоритма вывода СЭЭС (имеющей в своем составе три РДГ) из обесточенного состояния представлена ниже.
Граф-схема алгоритма вывода СЭЭС из обесточенного состояния
| Р1 – отсутствует напряжение на шинах ГРЩ; Р2, Р3, Р4 – АВ 1-го, 2-го и 3-го РДГ отключены; А5 – формирование сигнала на работу минимум двух РДГ; Р6, Р11, Р16 – частота вращения 1-го, 2-го и 3-го РДГ превышает минимально допустимое значение; Р7, Р12, Р17 – отсутствие блокирования пуска 1-го, 2-го и 3-го РДГ; Р8, Р9 – отсутствие команды на включение АВ 2-го и 3-го РДГ; Р13, Р14 – отсутствие команды на включение АВ 1-го и 3-го РДГ; Р18, Р19 – отсутствие команды на включение АВ 1-го и 2-го РДГ; А10, А15, А20 – формирование сигнала на включение АВ 1-го, 2-го и 3-го РДГ; А21 – формирование сигнала АПС «Авария системы управления» |
Перечень вопросов
1. Основні відомості про СЕЕС, класифікація і структурні схеми.
2. Основні параметри СЕЕС - вид струму, частота, напруга. Економічне обґрунтування вибору параметрів.
3. Суднові генератори змінного та постійного струму та їх характеристики.
4. Технічна експлуатація джерел електроенергії. Поняття технічного використання, технічного обслуговування та ремонту.
5. Автоматичні вимикачі. Призначення, основні елементи, основні характеристики.
6. Автоматичні вимикачі. Основні параметри. Сучасні автоматичні вимикачі серії "Маstеrрасt", "Соmрасt", їх основні параметри та застосування.
7. Устрій і принцип дії автоматичних вимикачів серії АМ.
8. Устрій і принцип дії автоматичних вимикачів приймачів електроенергії.
9. Устрій і принцип дії запобіжників
10. Порядок вибору комутаційно-захисної апаратури.
11. Устрій і принцип дії індукційних реле оберненої потужності
12. Призначення, класифікація та конструкція розподільчих устроїв.
13. ГРЩ. Конструкція. Апаратура і прибори, встановлені на ГРЩ.
14. Причини відхилення напруги суднових синхронних генераторів. Вимоги Регістру та СОЛАС по відновленню напруги.
15. Принципи будови системи автоматичного регулювання напруги. ТФК - устрій, принцип дії.
16. СЗАРН типу МСС. Основні елементи схеми. Початкове збудження.
17. СЗАРН типу МСС. Корекція напруги по струму, коефіцієнту потужності.
18. СЗАРН типу МСС. Робота дроселя відбору потужності в режимах самотній та паралельній роботі генераторів.
19. СЗАРН типу ГМС. Основні елементи схеми, початкове збудження. Амплітудно-фазове командування. Робота коректора напруги.
20. СЗАРН безщіткового генератора типу "Тhіrіраrt". Структура, забезпечення початкового збудження.
21. СЗАРН безщіткового генератора типу " Тhіrіраrt ". Робота контуру регулювання по обуренню та відхиленню.
22. Методи синхронізації синхронних генераторів.
23. Паралельна робота синхронних генераторів. Умови синхронізації та наслідки їх порушення.
24. Паралельна робота генераторів постійного струму. Умови вмикання та наслідки порушення цих умов. Розподілення навантаження.
25. Розподіл реактивного навантаження при паралельній роботі синхронних генераторів. Статичні і астатичні реактивні компенсатори.
26. Розподіл активного навантаження при паралельній роботі СГ. Автоматичний розподіл навантаження.
27. Основні режими роботи СЕЕС.
28. Визначення потужності СЕЕС табличним методом. Вибір кількості та потужності генераторів.
29. Джерела світла на судах, устрій, принцип дії. Схеми підключення люмінесцентних ламп.
30. Схема комутатора сигнальне - відрізнювальних вогнів КСКП - Б2-3.
31. Суднові прожектори. Призначення, конструкція.
32. Основні електричні параметри, що характеризуються акумуляторні батареї.
33. Кислотні акумулятори. Устрій. Принцип дії. Основні характеристики. Призначення.
34. Лужні акумулятори. Устрій. Принцип дії. Основні характеристики. Призначення.
35. Вибір та розміщення акумуляторів. ТБ при обслуговуванні.
36. Експлуатація кислотних акумуляторів.
37. Експлуатація лужних акумуляторів.
38. Принципова схема устрою програмного управління пуском АДГ.
39. Принципова схема пуску АДГ і вмикання навантаження
40. Захист суднових синхронних генераторів.
41. Захист від обриву фази при живленні від берегової мережі.
42. Захист електродвигунів. Трансформаторів, вимірювальних та реєструючих приладів і контрольних ламп. Вибірковість захисту. Логічна селективність.
43. Опір ізоляції кабелів і проводів. Норми опору ізоляції.
44. Методи контролю опору ізоляції. Мегомметри
45. Автоматизовані методи контролю опору ізоляції. Схема блоку контролю ізоляції БКІ-2.
46. Вибір площі поперечного перерізу жил кабелів.
47. Суднові кабелі і проводи. Методи прокладки кабелю. Перевірка кабелю на втрату напруги.
48. Принципи побудови автоматичних синхронізаторів.
49. Устрій синхронізації УСГ-35. Робота резервного каналу синхронізації.
50. Валогенераторні установки..
51. Устрій синхронізації УСГ-35. Робота блоку підгонки частоти.
52. Блок синхронізації БСГ в системі "Іжора-М".
53. Устрій розподілу активної потужності УРМ-35. Робота блоку УРМ-35ФУ.
54. Блок розподілу активних навантажень генераторів БРНГ.
55. Робота блоку контролю завантаження генераторів БКЗГ. Устрій включення резерву
56. Устрій включення резерву типу УВР.
57. Устрій струмового захисту УТЗ-1 А.
58. Структура мікропроцесорних систем управління
59. Схема контролю пуску потужних приймачів електроенергії в системі «Гієпас».
60. СУ СЕЕС типу "Гієпас". Об'єм автоматизації, основні елементи, структура.
61. Система управління і захисту генераторів типу "Сінпол". Об'єм автоматизації, основні елементи.
62. Типова структурна схема автоматизованої СЕЕС та її функції.
63. Класифікація електроустаткування за умовами безпеки; мережа з ізольованою нейтраллю, її аналіз, мережа із заземленою нейтраллю, аналіз; освідотство електроустановок.
64. Алгоритм виведення СЕЕС з обезструмленного стану.
Список литературы
1. , Миронов системы морских судов, - М.: Транспорт, 1991.
2. Баранов автоматизированные электроэнергетические системы. Учебник для вузов. – М.: Транспорт, 1988. – 328 с.
3. Баранов управление судовыми электроэнергетическими установками. – М.: Транспорт, 1981. – 255 с.
4. и др. Электроэнергетические установки и силовая электроника транспортных средств. Санкт-Петербург, Элмор, 2001 – 284 с.
5. Лейкин электрические станции и сети, - М.: Транспорт, 1991.
6. и др. Эксплуатация судовых систем электроснабжения. Санкт-Петербург, 2006. – 182 с.
7. Михайлов электроэнергетические системы судов. Л.: Судостроение, 1977. – 512 с.
8. , Норневский электрические станции.– М.: Транспорт, 1974. – 432 с.
9. , Пономаренко автоматизированные электроэнергетические системы.: Учебное пособие. – Одесса, ЦПАП. 1996 г. – 140 с.
10. Сухарев электрические станции и сети и их эксплуатация, Л.: Судостроение, 1986.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 |
