

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.88
Ю. В. ШАФРАНЮК¹
«ЦНИИ «Электроприбор», г. Санкт-Петербург
СИНТЕЗ АЛГОРИТМА КЛАССИФИКАЦИИ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ, РЕАЛИЗУЕМОГО В ПАССИВНОЙ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ГИБКОЙ ПРОТЯЖЕННОЙ БУКСИРУЕМОЙ АНТЕННОЙ
Предлагается методика синтеза оптимального по критерию максимального правдоподобия алгоритма классификации и определения координат морских шумящих объектов. Приводится алгоритм классификации и определения координат морских шумящих объектов, а также результаты моделирования, иллюстрирующие его работоспособность.
Введение
Пассивные гидроакустические станции с гибкими протяженными буксируемыми антеннами (ГАС с ГПБА) являются одними из основных информационных систем освещения подводной обстановки, позволяющими на достаточно больших дальностях осуществлять обнаружение подводных объектов. Одной из наиболее сложных задач, решаемых в ГАС с ГПБА, является задача классификации и определения координат шумящих объектов.
Для решения данной задачи был предложен алгоритм совместного определения координат и классификации объектов с помощью метода максимума функции правдоподобия (ФП) [1].
В разрабатываемом алгоритме используется идея совместного решения задачи классификации и определения координат объектов. Совместное решение задачи становится возможным при включении координат объектов в набор классификационных признаков (КП), т. е. наличию в них классификационной информации. Преимущество подобного подхода заключается в построении обобщённой модели, включающей в себя все существующие на данный момент модели среды и взаимного движения объектов и носителя ГАС.
Целью работы является синтез алгоритма совместного определения координат и классификации объектов.
Структурная схема обработки информации ГАС
На рисунке 1 изображена структурная схема обработки информации ГАС, а именно:
- блок первичной обработки информации (ПОИ), основной задачей которого является обнаружение сигналов;
- блок вторичной обработки информации (ВОИ), задачей которого является классификация и определения координат движения объектов;
- система гидроакустических расчетов (ГАР), производящая расчет параметров гидроакустического поля;
- навигационная система, вырабатывающая текущие параметры движения носителя;
- базы данных (БД), содержащие априорную информацию о целях различных классов.

Рис. 1. Структурная схема обработки информации ГАС
На вход блока, определяющего координаты и класс объектов (ВОИ) поступают данные формируемые в ПОИ (рис. 1). Эти данные являются достаточными статистиками, описывающими стохастические процессы на элементах антенны в предположении их стационарности на некотором промежутке времени. Процессы на элементах антенны формируются в результате суперпозиции помехи распределённых источников сигналов и излучений локальных источников сигналов в предположении их плосковолновости (т. е. удалённости от антенны, когда сферический фронт волны становится плоским). К достаточным статистикам следует отнести такие параметры как курсовой угол, мощность излучения, его спектр, величина изменения пеленга, пространственный спектр в вертикальной плоскости, корреляционная функция, дискреты в спектрах и т. п. Блок ВОИ включает в себя траекторный анализ, основной задачей которого является выделение сигнальных трасс из обнаруженных в ПОИ сигналов и накопление информации. Как только траекторный анализ воспроизводит трассу, включается задача классификации и определения координат движения и продолжается до потери контакта с объектом. Также для адаптации алгоритмов используются ГАР и навигационная система. Таким образом, измеряемые величины (достаточные статистики) и вектор состояния системы «помеха + сигналы локальных источников + носитель» связываются различными моделями на основе ГАР, а также геометрии взаимного движения.
В предлагаемом подходе к решению все модели используются комплексно для получения совместной ФП.
Постановка задачи
В основе решения задачи классификации объекта и определения его координат по параметрам его сигнала лежит использование КП – достаточных статистик, получаемых из выходных сигналов датчиков.
Используя различные модели движения носителя, объекта и распространения звука в среде функцию плотности распределения вероятности (ф. п.р. в.) всех признаков для каждого класса можно представить в следующем виде [2]:
![]() , (1)
, (1)
где ![]() – вектор измеряемых гидрологических параметров (например, вертикальное распределение скорости звука в ограниченном диапазоне глубин, характер океанического дна, в ряде случаев волнение поверхности и т. п.);
– вектор измеряемых гидрологических параметров (например, вертикальное распределение скорости звука в ограниченном диапазоне глубин, характер океанического дна, в ряде случаев волнение поверхности и т. п.); ![]() – вектор не измеряемых гидрологических параметров (например, параметры волновода, по которому распространяются звуковые лучи – форма дна и глубина места на удалении от текущего расположения носителя ГАС, затухание при распространении и отражении звука и т. п.);
– вектор не измеряемых гидрологических параметров (например, параметры волновода, по которому распространяются звуковые лучи – форма дна и глубина места на удалении от текущего расположения носителя ГАС, затухание при распространении и отражении звука и т. п.); ![]() – вектор измеряемых классификационных признаков (КП) (например, величина изменения пеленга, распределение мощности от источника в вертикальной плоскости и т. п.);
– вектор измеряемых классификационных признаков (КП) (например, величина изменения пеленга, распределение мощности от источника в вертикальной плоскости и т. п.); ![]() – вектор не измеряемых КП (например, полная мощность и спектр мощности в точке излучения);
– вектор не измеряемых КП (например, полная мощность и спектр мощности в точке излучения); ![]() – вектор, описывающий взаимное движение объекта и носителя;
– вектор, описывающий взаимное движение объекта и носителя;  – вектор параметров движения объекта;
– вектор параметров движения объекта; ![]() – дальность от носителя до объекта (горизонтальная дальность);
– дальность от носителя до объекта (горизонтальная дальность); ![]() – глубина объекта;
– глубина объекта; ![]() – курсовой угол носителя на объект (угол, под которым виден объект с носителя относительно направления движения последнего);
– курсовой угол носителя на объект (угол, под которым виден объект с носителя относительно направления движения последнего); ![]() – курс объекта;
– курс объекта; ![]() – скорость объекта;
– скорость объекта; ![]() – вектор параметров движения носителя;
– вектор параметров движения носителя; ![]() – расстояние от носителя до дна;
– расстояние от носителя до дна; ![]() – глубина носителя;
– глубина носителя; ![]() – курс носителя;
– курс носителя; ![]() – скорость носителя;
– скорость носителя; ![]() – индекс класса цели.
– индекс класса цели.
Алгоритм определения координат и класса объекта из алфавита ![]() классов при использовании метода максимума ФП будет иметь следующий вид:
классов при использовании метода максимума ФП будет иметь следующий вид:
 . (2)
. (2)
Рассмотрим алгоритм получения совместной ФП.
Пусть вектор измеряемых КП состоит из ![]() КП. Тогда каждый измеряемый КП можно представить в виде следующей стохастической модели:
КП. Тогда каждый измеряемый КП можно представить в виде следующей стохастической модели:
 , (3)
, (3)
где ![]() - количество КП;
- количество КП;
 - некая неслучайная функция, связывающая с истинным значением КП не измеряемые КП и гидрологические параметры, а также координаты и параметры движения объекта;
- некая неслучайная функция, связывающая с истинным значением КП не измеряемые КП и гидрологические параметры, а также координаты и параметры движения объекта;
![]() - вектор ошибок измерения КП.
- вектор ошибок измерения КП.
Ф. п.р. в. оценки вектора ![]() для каждого КП при фиксации значений векторов
для каждого КП при фиксации значений векторов ![]() ,
, ![]() и
и ![]() полностью определяется плотностью распределения ошибки измерения параметра
полностью определяется плотностью распределения ошибки измерения параметра ![]() :
:
 , (4)
, (4)
где  – ф. п.р. в. для случая гауссового распределения (первый аргумент – математическое ожидание, второй – среднеквадратическое отклонение).
– ф. п.р. в. для случая гауссового распределения (первый аргумент – математическое ожидание, второй – среднеквадратическое отклонение).
Поскольку ошибки измерения разных параметров сигнала, как правило, взаимно независимы, то при фиксации значений ![]() ,
, ![]() и
и ![]() совместная ф. п.р. в. оценок всех параметров сигнала, входящих в вектор
совместная ф. п.р. в. оценок всех параметров сигнала, входящих в вектор ![]() может быть вычислена как произведение ф. п.р. в. [3]:
может быть вычислена как произведение ф. п.р. в. [3]:
 . (5)
. (5)
Для получения ф. п.р. в. вектора оценок параметров ![]() зависящего только от искомых координат объектов, в частности, дальности
зависящего только от искомых координат объектов, в частности, дальности ![]() и глубины
и глубины ![]() , проинтегрируем (5) по ф. п.р. в. векторов
, проинтегрируем (5) по ф. п.р. в. векторов ![]() ,
, ![]() и
и ![]() :
:
 ,
, ![]() . (6)
. (6)
В качестве примера рассмотрим задачу определения координат объекта при использовании двух методов пассивного определения дальности: триангуляционного и вертикально разностно-дальномерного метода (ВРДМ).
Рассматривая частный случай, когда цель находится на траверзе, модель, связывающую измеренное значение пеленгов на антенну с дальностью до объекта можно представить в виде [4]:
 , (7)
, (7)
где ![]() - пеленга на антенну;
- пеленга на антенну;
![]() - расстояние между центрами антенн.
- расстояние между центрами антенн.
Рассматривая два луча – поверхностный и водный – модель, связывающую измеренные значения абсцисс максимумов корреляционной функции (КФ) с положением объекта излучения можно представить в виде:
 , (8)
, (8)
где ![]() - абсцисса максимумов КФ;
- абсцисса максимумов КФ;
 - времена распространения поверхностного и водного лучей;
- времена распространения поверхностного и водного лучей;
 - функция, определяющая абсциссу максимума КФ;
- функция, определяющая абсциссу максимума КФ;
![]() - глубина носителя.
- глубина носителя.
В этом случае, вектор ![]() и вектор параметров движения объекта
и вектор параметров движения объекта ![]() будут иметь вид:
будут иметь вид:
 ,
,  . (9)
. (9)
Выражение для определения совместной ф. п.р. в. может быть записано в следующем виде:

 . (10)
. (10)
В результате алгоритм определения координат объекта примет вид:
 . (11)
. (11)
Результаты моделирования
С целью анализа особенностей рассматриваемой задачи было проведено моделирование. При моделировании использовался эпизод, в котором пеленгуемый носителем объект располагался на траверзе. При этом ГАС двигался курсом 0° со скоростью 10 узлов, а пеленгуемый им объект курсом 180° со скоростью 15 узлов. В момент измерения дальности истинное расстояние от носителя до объекта составляло 5000 м.
Также считалось, что ошибки определения временной задержки и направления на источник при использовании триангуляционного метода независимы и распределены по нормальному закону со среднеквадратичными отклонениями, составляющими временной задержки 0,01, а для пеленгов 1°.
Для определения статистических характеристик оценки моделирование проводилось методом Монте-Карло с числом выборок  . Все ФП вычислялись на сетке по дистанции и глубине с шагом
. Все ФП вычислялись на сетке по дистанции и глубине с шагом  м и
м и ![]() м, и с числом узлов
м, и с числом узлов ![]() , соответственно.
, соответственно.
Для преодоления многозначности в оценке дистанции на модели КФ использовалось усреднение дистанций по глубине.
Результаты моделирования на одном цикле при длине антенной базы ![]() =1000м приведены в таблице.
=1000м приведены в таблице.
Таблица.
Методы | Математическое ожидание, м | Математическое ожидание, % | СКО, м | Истинные данные, м | ||||
|
|
|
|
|
|
|
| |
Триангуляционный метод | 5180 | 52,5 | 3,6 | 162,5 | 877 | 0 | 5000 | 20 |
ВРДМ | 18985 | 19,7 | 279,7 | 1,2 | 1651 | 5,1 | ||
Метод максимума ФП | 5120 | 20,1 | 2,4 | 13 | 882 | 8.9 |
На рис. 2 и 3 представлены графики ФП на сетке ![]() для триангуляционного метода, ВРДМ, а так же их совместной ФП.
для триангуляционного метода, ВРДМ, а так же их совместной ФП.
а) |
б) |
Рис. 2. Графики ФП для: а) триангуляционный метода; б) ВРДМ | |
в) | |
Рис. 3. График совместной ФП |
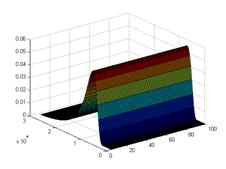
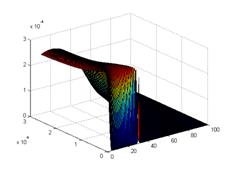
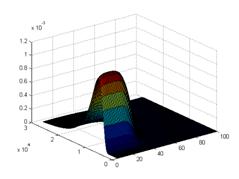
По результатам видно, что при определении дальности и глубины объекта на основе совместной ФП вырабатываемая оценка обладает меньшим смещением. При этом совместная ФП (рис. 3) обладает ярко выраженным максимумом как по глубине, так и по дальности, по сравнению с ФП для триангуляуионного метода, имеющей равномерное распределение по глубине, и ФП для ВРДМ, имеющей область многозначности как по дальности, так и по глубине.
Заключение
В результате был синтезирован алгоритм совместного определения координат объектов и их классификации. А также на примере определения координат (дальности до объекта и глубины) проиллюстрирована его работоспособность.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (проект -а и -а).
ЛИТЕРАТУРА
1. . Особенности синтеза алгоритмов классификации подводных объектов по их гидроакустическому полю//Акустический журнал, 1996, т. 42, №3, с. 396-400.
2. Ю. В Королева. Алгоритм совместного определения параметров движения и классификации целей по данным пассивных гидроакустических систем//Сборник трудов XI Международной конференции по мягким вычислениям и измерениям (SCM’2008), 2008.
3. . Синтез оптимального алгоритма пассивного определения дистанции до цели//Сборник трудов XI всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики», 2012 – С. 361-363.
4. , , Яковлев гидроакустическая техника. Состояние и актуальные проблемы. – СПб.: Наука, 2004. – 143 с.
¹ Научный руководитель д. т.н., профессор
