

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
и числовая ось R1 с элементами
y, R1={y}
и дано правило, однозначно ставящее в соответствие каждому элементу x ![]() некоторое число y R1, то говорят, что на множестве
некоторое число y R1, то говорят, что на множестве ![]() задана функция y = f(x) (рис.1.1).
задана функция y = f(x) (рис.1.1).
Число y называется значением функции на элементе x. Элемент ![]()
![]() называется элементом минимума функции f(x) на множестве
называется элементом минимума функции f(x) на множестве ![]() , если значение функции на элементе
, если значение функции на элементе ![]() не превосходит ее значения на любом другом элементе множества
не превосходит ее значения на любом другом элементе множества ![]() ,т. е.
,т. е.
f(![]() )
)![]() f(x)
f(x) ![]() x
x ![]() .
.
Значение f(![]() ) называется минимальным значением функции на множестве
) называется минимальным значением функции на множестве ![]() и обозначается
и обозначается
 .
.
Аналогично определяются элемент максимума и максимальное значение функции. Элемент ![]()
![]() называется элементом максимума функции f(x) на множестве
называется элементом максимума функции f(x) на множестве ![]() , если значение функции на элементе
, если значение функции на элементе ![]() не меньше, чем на любом другом элементе множества
не меньше, чем на любом другом элементе множества ![]() , т. е.
, т. е.
f(![]() )
)![]() f(x)
f(x) ![]() x
x ![]() .
.
Максимальное значение функции обозначается
f(![]() )=
)= ![]() f(x).
f(x).
Постановка задач оптимизации формулируется следующим образом. Дано описание множества ![]() и определенной на нем функции f(x). Требуется найти элемент x
и определенной на нем функции f(x). Требуется найти элемент x ![]() минимума (или максимума) функции f(x) на
минимума (или максимума) функции f(x) на ![]() и минимальное (максимальное) значение функции f(x). Таким образом, задача обязательно должна включать в себя два момента: описание
и минимальное (максимальное) значение функции f(x). Таким образом, задача обязательно должна включать в себя два момента: описание ![]() и задание f(x).
и задание f(x).
 Задача оптимизации не всегда имеет решение. Покажем это на примерах.
Задача оптимизации не всегда имеет решение. Покажем это на примерах.
Пример1. Множество X - вся числовая ось (рис.1.2). Минимальное значение функции не существует так же, как и элемент минимума: чем меньше x, тем меньше f(x).
Пример 2. Множество ![]() = (0,1), т. е.
= (0,1), т. е.
0<x<1,
f(x)=![]()
(рис.1.3). Минимального значения (и элемента минимума) не существует: чем ближе x к единице, тем меньше f(x), принять же x=1 нельзя, так как единица не входит во множество ![]() .
.
 Решение задачи оптимизации может отсутствовать не только в математических примерах, но и при анализе конкретных технических вопросов.
Решение задачи оптимизации может отсутствовать не только в математических примерах, но и при анализе конкретных технических вопросов.![]()
Решение задачи оптимизации может быть неединственно; при этом максимальное (минимальное) значение функции, конечно, единственно, а вот элементов максимума (минимума) - несколько (или даже бесконечно много, см. п. 1.4).
Пример 3. Если рассматривается на отрезке ![]() = [
= [![]() ] функция
] функция
y = sinx
x ![]() [
[![]() ],
],
то минимальное значение функции равно - 1, а элементов минимума - два:
![]() = -
= -![]() ;
; ![]() =
= ![]() .
.
Задачи о минимуме и максимуме функции f(x) на ![]() легко сводятся одна к другой умножением функции f(x) на –1:
легко сводятся одна к другой умножением функции f(x) на –1:
Теорема о взаимности задач оптимизации. Если ![]()
![]()
![]() есть элемент минимума f(x) на
есть элемент минимума f(x) на ![]() , то тот же элемент есть элемент максимума функции
, то тот же элемент есть элемент максимума функции 
![]() на X, т. е.
на X, т. е.

Доказательство. По определению минимума:


Умножая неравенство на –1, получим

или, вводя обозначение ![]() :
:
 ;
;  ,
,
что является определением элемента максимума функции ![]() на
на ![]() .
.
Поэтому впредь будем рассматривать лишь методы минимизации функции ![]() на
на ![]() , так как при необходимости задачу о максимуме функции можно легко свести к задаче о минимуме, изменив знак функции.
, так как при необходимости задачу о максимуме функции можно легко свести к задаче о минимуме, изменив знак функции.
Приведем более конкретные формулировки некоторых задач оптимизации, т. е. описание соответствующих множеств ![]() и функций
и функций ![]() .
.
Методы их решения будут излагаться в курсе.
Оптимизация функции одной переменной
Элементами множества ![]() являются вещественные числа, а
являются вещественные числа, а ![]() - обычная функция одной переменной.
- обычная функция одной переменной.
Если ![]() - вся числовая ось, говорят об оптимизации
- вся числовая ось, говорят об оптимизации ![]() без ограничений; если
без ограничений; если ![]() - некоторый промежуток числовой оси:
- некоторый промежуток числовой оси:
![]() интервал
интервал ![]() , т. е.
, т. е. ![]() ;
;
полуинтервал ![]() , т. е.
, т. е.![]() ;
;
полуотрезок  , т. е.
, т. е.  ;
;
отрезок ![]()
![]() , т. е.
, т. е. ![]() ,
,
то говорят об оптимизации с ограничениями на ![]() .
.
Функция ![]() может быть дифференцируема один или несколько раз, кусочно-дифференцируема, просто непрерывна.
может быть дифференцируема один или несколько раз, кусочно-дифференцируема, просто непрерывна.
Существование решения можно гарантировать лишь в некоторых случаях, в соответствии с теоремой Вейерштрасса.
Теорема Вейерштрасса. Функция ![]() , непрерывная на отрезке
, непрерывная на отрезке , принимает на нем максимальное и минимальное значения, т. е.
, принимает на нем максимальное и минимальное значения, т. е.
 ;
;
 .
.
Оптимизация функции нескольких переменных
Элементами множества ![]() являются
являются ![]() -мерные вектора, или точки
-мерные вектора, или точки ![]() -мерного пространства.
-мерного пространства.
Иначе говоря,  , где каждый элемент
, где каждый элемент ![]() есть совокупность
есть совокупность ![]() чисел
чисел ![]() .
.
 Функция
Функция ![]() на таком множестве
на таком множестве ![]() представляет собой функцию
представляет собой функцию ![]() переменных
переменных ![]() .
.
При n=2 ![]() - есть функция двух переменных
- есть функция двух переменных![]() ,
,![]() , и ее поведение на множестве
, и ее поведение на множестве ![]() , являющемся частью плоскости
, являющемся частью плоскости ![]() , можно изобразить графически (рис.1.4).
, можно изобразить графически (рис.1.4).
Если элементами ![]() являются любые точки
являются любые точки![]() n – мерного пространства – говорят о безусловном оптимуме функции
n – мерного пространства – говорят о безусловном оптимуме функции ![]() на
на ![]() . Если элементы
. Если элементы ![]() должны удовлетворять некоторым дополнительным условиям
должны удовлетворять некоторым дополнительным условиям
j , i=1,2,...,k, (1.1)
, i=1,2,...,k, (1.1)
где j![]() - функции n-переменных
- функции n-переменных ![]() , то говорят о задаче на условный оптимум
, то говорят о задаче на условный оптимум ![]() на
на ![]() .
.
При этом, исключая особые случаи, должно быть ![]() , так как при
, так как при ![]() (1.1) составит систему n уравнений, которые однозначно зададут n переменных
(1.1) составит систему n уравнений, которые однозначно зададут n переменных ![]() , и отпадет сама возможность оптимизации; при
, и отпадет сама возможность оптимизации; при![]() равенствам (1.1) нельзя будет удовлетворить за счет имеющихся n переменных.
равенствам (1.1) нельзя будет удовлетворить за счет имеющихся n переменных.
Если элементы ![]() должны удовлетворять условиям в виде неравенств, строгих
должны удовлетворять условиям в виде неравенств, строгих
 (1.2)
(1.2)
или нестрогих
 , (1.3)
, (1.3)
то говорят об оптимизации с ограничениями на ![]() или о задаче нелинейного программирования.
или о задаче нелинейного программирования.
Неравенств, вообще говоря, может быть сколько угодно - и больше, и меньше, чем n.
Если все неравенства нестрогие, то определяемое ими множество X называют замкнутым множеством.
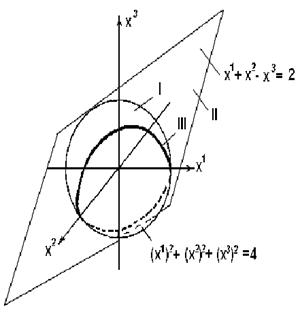
Пример 1. Множество X - совокупность точек трехмерного пространства, удовлетворяющих условиям:
Здесь n=3, k=2<n. Геометрически элементы x, удовлетворяющие первому соотношению, есть точки сферы I (рис. 1.5), а второму – плоскости II, следовательно, множество Х представляет собой совокупность точек окружности III.
Рис. 1.5
Пример 5. Элементы множества Х – точки плоскости x=(x¹¸x²), удовлетворяющие неравенствам : x
![]() 1; x1
1; x1![]() -1
-1![]()
, x![]()
![]() 2 ; x
2 ; x![]()
![]() 1,
1,
x+(x![]() )
)![]() -1,5
-1,5![]() 0
0 . Здесь множество X - замкнутое, неравенств больше, чем переменных, что вполне допустимо. Геометрически множество X изображается заштрихованной фигурой (рис. 1.6).
. Здесь множество X - замкнутое, неравенств больше, чем переменных, что вполне допустимо. Геометрически множество X изображается заштрихованной фигурой (рис. 1.6).
Оптимизация функции одной переменной может рассматриваться как частный случай оптимизации функции n переменных при n = 1. Тогда задача на условный оптимум возникнуть не может (k=0), а оптимизация с ограничениями приводит к множеству X в виде интервала, полуинтервала или отрезка (замкнутое множество).
Функция f(x) , а также ![]()
![]() (x) ,
(x) , ![]() (x) ,
(x) , ![]() (x) рассматриваются чаще всего как непрерывные или непрерывные одно или дважды дифференцируемые.
(x) рассматриваются чаще всего как непрерывные или непрерывные одно или дважды дифференцируемые.
Теорема Вейерштрасса. Функция y = f(x) , непрерывная на замкнутом множестве Х, принимает на нем минимальное и максимальное значения:
![]()
![]()
![]() X, f (
X, f (![]() )=
)=![]() f(x) ;
f(x) ;
![]()
![]()
![]() X, f (
X, f (![]() )=
)=![]() f(x) .
f(x) .
1.2 ПРИМЕР. ВЫБОР КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ТОНКОСТЕННОГО ЦИЛИНДРИЧЕСКОГО СТЕРЖНЯ
 В качестве примера рассмотрим задачу выбора конструктивных параметров тонкостенного цилиндрического стержня, передающего сжимающую нагрузку. Этими параметрами являются средний диаметр D и толщина T .Кроме них в задаче фигурируют исходные данные, являющиеся известными константами:
В качестве примера рассмотрим задачу выбора конструктивных параметров тонкостенного цилиндрического стержня, передающего сжимающую нагрузку. Этими параметрами являются средний диаметр D и толщина T .Кроме них в задаче фигурируют исходные данные, являющиеся известными константами:
- сила P,
- длина стержня L,
- модуль упругости E,
- плотность r.
Критерием оптимальности является вес стержня W:
W = r * 3.1415 * L * D * T ![]() min.
min.
Значения D, T, доставляющие минимум W, должны удовлетворять ряду условий. Во-первых, это геометрические ограничения, отражающие тот факт, что диаметр стержня не может превосходить некоторого максимального значения Dmax, а толщина T - некоторого минимального Tmin (например, исходя из особенностей оборудования, на котором будет изготавливаться стержень). Во-вторых, под действием нагрузки стержень не должен сломаться (местное коробление) или потерять устойчивость (выпучивание). Математически эти условия записываются следующим образом:
D ![]() Dmax,
Dmax,
T ![]() Tmin,
Tmin,
![]()
![]() 10 ,
10 ,![]()
 ,
,
 .
.
Перечисленные условия задают множество Y допустимых значений пар (D, T), среди которых требуется найти пару, доставляющую минимальное значение функции W. Поскольку множество Y является областью двумерного пространства, его можно изобразить графически на листе бумаги в координатах D, T. Постройте это множество при следующих исходных данных :
P = 22.3 кН,
L = 2.54 м,
E = 6.89 Е 07 кПа,
r = 2771 кг/м3.
Оптимизируемую функцию W(D, T) также изобразите в координатах D, T семейством ее линий уровня. По определению, элемент минимума является точкой области Y, в которой функция W примет свое минимальное на Y значение. Найдите эту точку. Она соответствует следующим значениям:
D = 0.079 м,
T = 0.001 м,
W = 10.8 Н.
Видно, что элемент минимума лежит на границе множества Y в точке пересечения ограничений по выпучиванию и толщине стенки стержня. Однако такое сочетание предельных ограничений не является закономерной особенностью задачи, а определяется спецификой исходных данных. Так, если Dmax = 0.127 м, Tmin =0.0004 м, то оптимальной конструкции минимального веса будут соответствовать параметры D = 0.01 м, T = 0.0005 м (W = 10.8 Н) и элемент минимума окажется на пересечении ограничений по короблению и выпучиванию (проверьте это геометрическими построениями).
1.3 ПРИМЕР. ОПТИМИЗАЦИЯ ДВУХСТЕРЖНЕВОЙ ФЕРМЫ
Конечно, совсем не обязательно, чтобы элемент оптимума находился на границе множества Y. В подтверждение этого приведем еще один пример: оптимизацию двухстержневой фермы с выбором положения узла, соединяющего два ее тонкостенных трубчатых стержня равной длины (рис. 1.7).
Обозначим через 2*B пролет между ее опорами, через H - высоту узла над основанием. Пусть заданы в качестве исходных параметров:
- вертикально вниз направленная сила P = 294 кН,
- пролет между опорами 2![]() B = 1.524 м,
B = 1.524 м,
- модуль упругости E = 2.07 Е 08 кПа,
- плотность r = 8313 кг/м3,
- предел текучести материала s = 414 кПа,
- толщина стенки стержней T = 0.003 м.
В качестве двух независимых переменных проектирования примем диаметр стержней D и высоту узла H. Критерий оптимальности - по-прежнему вес конструкции W. Тогда математическая постановка задачи оптимизации будет иметь вид ( без учета геометрических ограничений):
целевая функция

ограничение по выпучиванию
![]()
 ,
,
ограничение по короблению
 .
.
 |
Построив множество допустимых решений Y как область двумерного пространства в координатах (D, H) и нанеся на нее семейство линий уровня целевой функции W(D, H), можно увидеть, что оптимальному решению соответствует точка, лежащая внутри области допустимых значений.
1.4 ПРИМЕР. ПРОКЛАДКА ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ
Города А, В, С, Д (рис. 1.8) получают по местным линиям “а” электроэнергию от основной линии “б”, проходящей параллельно оси Х на расстоянии![]() , которое мы должны подобрать так, чтобы суммарная длина местных линий L была наименьшей. Для решения задачи следует построить функцию L(
, которое мы должны подобрать так, чтобы суммарная длина местных линий L была наименьшей. Для решения задачи следует построить функцию L(![]() ) и найти ее элемент минимума. Эта функция изображена на рис. 1.9. Видно, что ее элементов минимума бесконечно много: любое значение
) и найти ее элемент минимума. Эта функция изображена на рис. 1.9. Видно, что ее элементов минимума бесконечно много: любое значение ![]() из отрезка
из отрезка ![]() , т. е. линию «б» можно проложить в любом месте зоны абсолютного минимума (рис. 1.9).
, т. е. линию «б» можно проложить в любом месте зоны абсолютного минимума (рис. 1.9).
1.5 МОДЕЛЬ МНОГОЦЕЛЕВОЙ СИСТЕМЫ
Ясно, что множество возможных решений, которым мы располагаем при оптимизации, является лишь частью мира, из которого выделен объект исследования. Поэтому если его " внутреннее устройство" характеризуется набором допустимых решений y из Y, то необходимо охарактеризовать и его взаимодействие с внешней средой с помощью набора внешних характеристик x. Эти характеристики, как правило, неоднозначны, что отражает многоцелевой характер любого решения. Так, если речь идет о конструкции, то одной из внешних характеристик является температура среды, в которой конструкция будет работать; эта температура может изменяться в эксплуатационных пределах, например, от -40 градусов Цельсия до +50 градусов Цельсия и т. д. Таким образом, влияние внешней среды характеризуется внешним множеством X, описывающим возможное изменение внешних характеристик объекта. С учетом сказанного, эффективность f решения y зависит уже не только от самого решения, но и от внешних условий x, в которых решение реализуется. Соответствующая характеристика является скалярной функцией f(x, y), ![]() и называется функцией локальной эффективности (принято считать ее неотрицательной). Ясно, что ее непосредственной оптимизацией нельзя получить конкретный оптимальный набор проектных параметров объекта, так как для различных внешних условий этот набор будет различен. Поэтому от функции локальной эффективности переходят к критерию оптимальности F многоцелевой системы одним из двух способов:
и называется функцией локальной эффективности (принято считать ее неотрицательной). Ясно, что ее непосредственной оптимизацией нельзя получить конкретный оптимальный набор проектных параметров объекта, так как для различных внешних условий этот набор будет различен. Поэтому от функции локальной эффективности переходят к критерию оптимальности F многоцелевой системы одним из двух способов:
1) гарантирующая многоцелевая система (ГМС)
 ;
;
2) интегральная многоцелевая система (ИМС)
 .
.
При первом способе за критерии принимается эффективность решения в самых неблагоприятных внешних условиях. Его целесообразно применять, например, при проектировании единичных или очень ответственных изделий. Во втором случае критерий соответствует среднему значению эффективности решения на всем диапазоне внешних условий. Его применяют при проектировании изделий, выпускаемых большими сериями и эксплуатируемых во всем диапазоне внешних условий. Если известна частота применения этих изделий в различных условиях, то она вводится как зависящий от x сомножитель в функцию локальной эффективности.
Наличие внешнего множества вносит в структуру многоцелевой системы еще одну важную особенность. Ясно, что чем шире это множество, тем больше отличается на его элементах оптимальное решение от того, которое было бы выбрано для каждого элемента в отдельности. С этой точки зрения, чем универсальнее проектируемый объект, тем ниже его эффективность. С данными явлениями можно бороться, принимая многоэлементные решения (стратегии) A = { yj }, j=1,..,m, ![]() . Такое решение содержит m отдельных решений, между которыми "распределяются" элементы внешнего множества, так что для различных внешних условий реализуются те элементы многоэлементного решения, которые имеют для этих условий наибольшую эффективность (наименьшее значение функции локальной эффективности).
. Такое решение содержит m отдельных решений, между которыми "распределяются" элементы внешнего множества, так что для различных внешних условий реализуются те элементы многоэлементного решения, которые имеют для этих условий наибольшую эффективность (наименьшее значение функции локальной эффективности).
Распределение задается функцией E(x), которая сопоставляет каждому элементу внешнего множества ![]() номер того элемента многоэлементного решения, в "зону" которого x попадает. Сама же эта зона Ej называется областью Дирихле j-го элемента:
номер того элемента многоэлементного решения, в "зону" которого x попадает. Сама же эта зона Ej называется областью Дирихле j-го элемента:
Ej = {x ![]() X : E(x)=j}j=1,…,m.
X : E(x)=j}j=1,…,m.
Ясно, что локальная эффективность многоэлементного решения A из Y описывается минорантой
L(x, A) = ![]() =
= ,
,
а критерий оптимальности равен:
для ГМС 
 ,
,
для ИМС ![]() =
= при
при  ,
,
![]() =
=![]() при
при ![]() .
.
Наиболее ярким примером многоцелевой системы являются типовые серии домов, сортаменты материалов, типоразмерные ряды станков и машин. Все эти системы многоэлементны, причем их многоэлементность вызвана именно широтой и многообразием условий применения. Так, в рассмотренной выше задаче об оптимальном проектировании цилиндрических стержней под восприятие сжимающей нагрузки предполагалось, что для каждой конкретной ситуации, задаваемой силой P и длиной стержня L (материал стержня будем считать выбранным заранее), может быть изготовлен стержень с оптимальными параметрами : диаметром D и толщиной T. Однако такая возможность на практике представляется весьма редко. Более типична задача, когда предприятие по производству металлоизделий для строительства должно определить сортамент выпускаемых труб, т. е. многоэлементный набор труб с параметрами (Dj, Tj), j=1,..,m. Этот сортамент должен обеспечить возможность передачи сжимающих усилий в диапазоне, например, от 10 до 100 Н на расстоянии от 1 до 10 м. Естественно, в каждом случае будет использоваться та труба из сортамента, которая обладает наименьшим весом, однако этот вес будет превосходить тот, который имел бы элемент, оптимально рассчитанный для данной ситуации (конечно, в редких случаях элемент, взятый из сортамента, может случайно совпасть с ним).Легко вывести, что для материала, рассмотренного в примере, относительное превышение веса ![]() может быть рассчитано по формуле
может быть рассчитано по формуле
 .
.
В терминах многоцелевой системы внешним множеством в этой задаче является прямоугольная область [10,100] ![]() [1,10] в пространстве координат P, L; параметры сортамента (Dj, Tj), j=1,..,m представляют собой искомое многоэлементное решение, а функция
[1,10] в пространстве координат P, L; параметры сортамента (Dj, Tj), j=1,..,m представляют собой искомое многоэлементное решение, а функция ![]() - функцию локальной эффективности. Обсуждая критерий оптимальности при выборе сортамента труб, можно представить себе два варианта. Если бы были известны все ситуации, в которых предстоит использовать сортамент (но их число слишком велико для того, чтобы для каждой изготовить собственную трубу), то можно было бы использовать в качестве критерия суммарный расход материала. Ясно, что в этом случае мы пришли бы к интегральной многоцелевой системе. Если же, как это и бывает в действительности, частота появления различных проектных ситуаций заранее неизвестна, принять такой критерий невозможно. В этом случае следует разработать сортамент так, чтобы минимизировать максимальный возможный проигрыш в любой ситуации, т. е. гарантировать, что, используя данный сортамент, мы в любом случае проиграем по весу конструктивного элемента не более, например, 7% по сравнению со специально спроектированным для данного случая элементом, причем всякий другой сортамент (при том же m) может привести к большим потерям. Тогда мы приходим к гарантирующей многоцелевой системе.
- функцию локальной эффективности. Обсуждая критерий оптимальности при выборе сортамента труб, можно представить себе два варианта. Если бы были известны все ситуации, в которых предстоит использовать сортамент (но их число слишком велико для того, чтобы для каждой изготовить собственную трубу), то можно было бы использовать в качестве критерия суммарный расход материала. Ясно, что в этом случае мы пришли бы к интегральной многоцелевой системе. Если же, как это и бывает в действительности, частота появления различных проектных ситуаций заранее неизвестна, принять такой критерий невозможно. В этом случае следует разработать сортамент так, чтобы минимизировать максимальный возможный проигрыш в любой ситуации, т. е. гарантировать, что, используя данный сортамент, мы в любом случае проиграем по весу конструктивного элемента не более, например, 7% по сравнению со специально спроектированным для данного случая элементом, причем всякий другой сортамент (при том же m) может привести к большим потерям. Тогда мы приходим к гарантирующей многоцелевой системе.
Численные методы оптимизации многоцелевых систем варьируются в зависимости от характера множеств X и Y, функции локальной эффективности и типа системы (ГМС или ИМС). Отметим, что, вообще говоря, оптимизацию многоцелевой системы можно свести к обычной задаче оптимизации, если рассматривать A как одноэлементное решение в пространстве размерности в m раз большей, чем размерность пространства проектных параметров, и игнорировать особую структуру критерия оптимальности. Однако при этом, в связи с увеличением размерности задачи, резко возрастает трудоемкость ее решения; кроме того, критерий оказывается весьма сложной многоэкстремальной функцией, для оптимизации которой большинство методов оптимизации непригодно.
В следующих задачах опишите соответствующую многоцелевую систему, т. е. определите:
- внешнее множество,
- множество стратегий,
- функцию локальной эффективности,
- многоэлементную стратегию,
- критерий оптимальности для ГМС и ИМС (обоснуйте, в каких случаях целесообразно использовать каждый критерий оптимальности).
Пример 1. На территории заповедника в Африке расположить 5 центров спасения так, чтобы гарантировать минимальное время прибытия в любую точку заповедника в случае чрезвычайной ситуации.
Пример 2. Разработать оптимальный параметрический ряд диаметров болтов для восприятия любой растягивающей нагрузки от 2 кГ до 5 т.
Пример 3. Разработать оптимальный набор подарочных коробок для упаковки изделий, имеющих габаритные размеры от 10х10х10 до 50х80х60 см.
Пример 4. Известны экзаменационные оценки по трем дисциплинам у студентов, поступивших на первый курс вуза. Сформировать из них группы (возможно, неравной численности), в которые собраны студенты, максимально близкие друг к другу по своей подготовке.
Пример 5. В серии экспериментов замерялись 5 параметров наблюдаемых объектов. Результаты измерений обладают значительным разбросом, свидетельствующим о том, что объекты делятся на несколько видов (например, 4). Определить средние значения параметров, характеризующие каждый вид. Предложить, как можно определить вероятное число различных видов, если оно заранее неизвестно.
Пример 6. Для разработки лекала, позволяющего рисовать дуги различных кривых второго порядка, найти набор из 5 таких кривых, наилучшим образом представляющий любые неубывающие кривые второго порядка, проходящие на отрезке [0,1] через точки (0,0) и (1,1).
Пример 7. Обмундирование каких 7 ростов и 10 размеров следует заказать военному ведомству, имея в виду, что рост солдат, одеваемых в стандартное обмундирование, варьируется от 150 до 205 см, а охват талии - от 38 до 60 см?
1.6 ЭЛЕМЕНТЫ ТЕОРИИ РАЗМЕРНОСТЕЙ
В математике переменные величины считаются отвлеченными, т. е. не связанными органически с конкретными физическими характеристиками. Однако в инженерном деле, естественно, это не так, и основным свойством любой переменной величины является ее размерность, т. е. выражение единицы измерения этой величины через основные единицы измерения. Размерность скорости, например, км/ч или м/с ; размерность ускорения - м/с2 и т. п. Если обозначить единицу длины символом L, массы - М, времени - Т и считать их основными единицами, то размерность любой переменной можно представить в виде формулы. Размерность величины принято обозначать этой величиной в квадратных скобках. Тогда, если V - скорость, а - ускорение, то

Показано, что поскольку отношение двух численных значений одной и той же переменной величины не должно зависеть от выбора масштабов для основных единиц измерения, то формулы размерности всех переменных величин имеют вид степенных одночленов (т. е., например, в системе СGS, где основными являются L, M,T,
 .
.
Из этого следует теорема, которая позволяет открывать некоторые физические и технические закономерности чисто математическим путем.
Теорема. Поскольку физические и технические закономерности не должны зависеть от выбора масштабов для измерения описывающих их переменных величин, они могут быть описаны в виде функциональных соотношений между безразмерными (отвлеченными) комплексами.
Какие возможности это открывает, покажем на примерах.
1. Математический маятник.
Ясно, что его движение определяется величинами :
период колебаний T , с
длина l ,м
масса m ,кг
ускорение свободного падения g, m/с2
начальный угол отклонения ![]() ,рад
,рад
Это движение должно описываться функциональной зависимостью между безразмерными комплексами. Но единственные два независимых безразмерных комплекса, которые можно составить из перечисленных величин, это

Значит, уравнение движения маятника имеет вид
 .
.
Если представить, что это уравнение решено относительно первого комплекса, то
 ,
,
где f (![]() ) - какая-то функция от начального отклонения
) - какая-то функция от начального отклонения ![]() . Отсюда
. Отсюда
T = k (![]() )
)![]()
![]() ,
,
где k (![]() )
) ![]() .
.
Итак, мы выяснили чисто математическим путем то, что в свое время нашел Галилей: период колебаний маятника не зависит от его массы, прямо пропорционален квадратному корню длины и обратно пропорционален квадратному корню ускорения свободного падения.
2. Движение тела в сопротивляющейся среде
Оно определяется следующими величинами:
относительные параметры формы Е (безразмерные параметры),
линейный размер l , м
плотность среды Q , кг/м3
скорость движения V , м/с
сила сопротивления P , кг*м/с2
Независимые безразмерные комплексы:

значит, закономерность движения описывается неявно
или явно

т. е.

Итак, доказано, что сопротивление среды пропорционально ее плотности, квадрату скорости движения в ней и квадрату линейного размера.
3. Тело, погруженное в жидкость
Определяющие величины :
плотность жидкости Q , кг/м3
объем тела V , м3
ускорение свободного падения g, м/с2
сила выталкивания P ,кг![]() м/с2
м/с2
Единственный безразмерный комплекс :
![]()
значит, функциональная связь

т. е.

Таким образом, доказано, что выталкивающая сила пропорциональна весу вытесненной телом жидкости ![]() С этой точки зрения заслуга Архимеда "лишь" в том, что он установил, что k=1.
С этой точки зрения заслуга Архимеда "лишь" в том, что он установил, что k=1.
Из сказанного выше вытекают важные выводы для инженера.
1. В любой сумме, входящей в математическую модель объекта или процесса, все слагаемые должны иметь одинаковую размерность.
2. Математические модели целесообразно приводить к функциональным зависимостям между безразмерными комплексами переменных величин. Именно этого мы будем придерживаться в настоящем пособии.
1.7 О СООТНОШЕНИИ АНАЛИТИЧЕСКИХ
И ЧИСЛЕННЫХ МЕТОДОВ
Решение описанных задач оптимизации производится как аналитическими, так и численными методами. При этом аналитические методы, рассматриваемые в главе 2, очень красивые и удобные для многоаспектного анализа полученных решений, к сожалению, как правило, распространяются на ограниченные классы "хороших" задач оптимизации - когда критерий унимодален, выпукл. Большинство из них пригодно для отыскания лишь относительного минимума. Практические же задачи оптимизации, как правило, многоэкстремальны, критерии оптимальности в них задаются весьма сложными алгоритмами, в которых и речи не может быть о дифференцируемости. Поэтому, при всей теоретической и практической ценности (для задач исследовательского плана) аналитических методов, они не могут обеспечить оптимизацию сложных технических и экономических решений. Для этого приходится применять специально рассчитанные на использование ЭВМ численные методы оптимизации.
Другая причина применения численных методов состоит в том, что даже когда аналитические методы главе 2 применимы, они сводят отыскание оптимального решения к решению замкнутой системы уравнений. Но ведь и системы уравнений (кроме исключительных случаев) могут решаться только численно!
В то же время, говоря о численных методах оптимизации, сделаем ряд замечаний общего характера.
Во-первых, нет такого численного метода, которому можно "предъявить" задачу оптимизации непосредственно в исходной постановке и автоматически получить из ЭВМ элемент минимума. Любой численный метод требует от человека предварительного исследования задачи оптимизации с тем, чтобы получить о ней некоторую информацию общего характера. В зависимости от специфики метода это могут быть: постоянная Липшица для критерия оптимальности; размеры параллелепипеда, заключающего в себе множество допустимых решений; уверенность в том, что критерии и ограничения выпуклы, дифференцируемы, что оптимизируемая функция унимодальна; примерное количество относительных оптимумов и зоны их размещения. Поэтому применение ЭВМ для оптимизации не избавляет исследователя от содержательного анализа задачи, да это и хорошо!
Во-вторых, только при оптимизации функции одной переменной и решении задач линейного программирования с несколькими десятками переменных и ограничений существующие численные методы дают уверенный результат "с первого предъявления". Во всех остальных задачах оптимизации по ходу их решения требуется, анализируя промежуточные результаты, варьировать настроечными параметрами, которые входят в состав метода (например, требуемой точностью вычислений, величиной шага), а то и переходить от одного метода к другому. Поэтому решение оптимизационной задачи - это всегда диалог человека с машиной. Эффективное ведение такого диалога сугубо индивидуально, поэтому при изложении конкретных методов диалоговый характер их применения не оговаривается, но он именно таков.
В-третьих, для пользователей, применяющих ЭВМ, характерно стремление к увеличению размерности решаемых оптимизационных задач с тем, чтобы увязать через ЭВМ как можно больше узлов проектируемого изделия или факторов, воздействующих на его эффективность. Этому способствует централизация в ЭВМ математических моделей и банков данных. В этих условиях возникают попытки осуществить решение одной большой задачи оптимизации, используя для этого какой-либо численный метод. Следует четко представить, что такие попытки нереалистичны. Современные численные методы оптимизации, реализованные на наиболее совершенных ЭВМ, таковы, что позволяют реально решать задачи линейного программирования с несколькими сотнями и тысячами переменных и ограничений, однако многие задачи не могут быть достаточно полно представлены в линейной постановке. Что же касается нелинейных задач, то реально могут быть решены задачи не более чем с десятком параметров (возможны, конечно, редкие исключения за счет эффективного использования специфики конкретного объекта оптимизации).
В-четвертых, при изучении методов оптимизации возникает вопрос, какой же из них является "лучшим". К сожалению, универсально лучшего метода нет - в разных задачах целесообразно применять различные существующие методы. Более того, среди специалистов по оптимизации распространена точка зрения, что для каждой новой сколько-нибудь серьезной практической задачи приходится разрабатывать свой специфический метод оптимизации, который использует наиболее уместные идеи известных способов и учитывает конкретные особенности этой задачи. В целом же, по нашему мнению, более перспективны глобальные методы типа метода сетей. Они обладают замедленной сходимостью и требуют больших объемов памяти ЭВМ, но зато минимально загружают исследовательской и "настроечной" работой человека, заинтересованного в решении задачи. Стремительный же рост быстродействия и объемов памяти ЭВМ позволяет надеяться, что требования, предъявляемые этими методами к ресурсам ЭВМ, не окажутся чрезмерными, тем более, что, в соответствии с предыдущим замечанием, оптимизационных задач очень большой размерности решать вообще не следует.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 |
