

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531.74.082.4
А. И. НЕЗНАНОВ
A. I. NEZNANOV
АЛГОРИТМ АВТОМАТИЗАЦИИ ПОСТРОЕНИЯ ЭКСПЕРИМЕНТАЛЬНЫХ АЧХ И ФЧХ ДАТЧИКА НЕГОРИЗОНТАЛЬНОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ
ALGORITHM OF THE AUTOMATION OF EXTRACTION OF EXPERIMENTAL FREQUENCY RESPONSE OF THE SENSOR OF OUT OF LEVEL OF THE RAILWAY
В статье приведен алгоритм автоматизации построения АЧХ и ФЧХ датчика негоризонтальности на основе массивов его и образцовых сигналов, полученных с платы сбора данных для различных частот изменения угла негоризонтальности
Ключевые слова: алгоритм, автоматизация, АЧХ, ФЧХ, экспериментальные данные, датчик
In this article algorithm of the automation of extraction of frequency response of the sensor of out of level of the railway from the experimental data which was obtained from DAQ board is given
Key words: algorithm, automation, frequency response, experimental data, sensor
Одной из актуальных задач является измерение поперечной негоризонтальности железнодорожного пути. Безопасность, бесперебойность движения, уровень комфорта пассажиров в значительной мере зависят от состояния пути. Особую важность задача поддержания исправного состояния пути приобрела в связи с внедрением высокоскоростных поездов. Для ее решения необходимо производить систематический контроль и текущее содержание железнодорожного пути.
Восстановление пути осуществляется выправочно-подбивными машинами, систематический контроль осуществляется в вагонах-лабораториях, движущихся со скоростью движения поездов. Производительность и точность работы этих систем напрямую определяется датчиками негоризонтальности, входящими в их структуру. При этом к датчикам негоризонтальности предъявляются достаточно высокие требования по динамической точности. В первую очередь это относится к минимуму амплитудных и фазовых искажений [1]. Таким образом, становится весьма полезным знать их реальные динамические характеристики (АЧХ и ФЧХ).
Для получения экспериментальных АЧХ и ФЧХ датчиков негоризонтальности может применяться установка, аналогичная представленной на рисунке 1, в которой обработка экспериментальных данных, полученных в результате измерений в процессе динамических испытаний опытного образца датчика, полностью автоматизирована с помощью персонального компьютера и соответствующего программного обеспечения.

Рисунок 1 – Структурная схема экспериментальной установки для исследования динамических характеристик датчика
1 – датчик негоризонтальности; 2 – стенд; 3 – плата сбора данных; 4 – ПЭВМ
Стенд 2 имитирует изменение угла негоризонтальности с заданной частотой, совершая угловые колебания площадки, на которую установлен датчик негоризонтальности 1, выходное напряжение которого пропорционально углу негоризонтальности. Выходной сигнал датчика, а также выходной сигнал стенда, который представляет собой постоянное напряжение, пропорциональное мгновенному значению угла негоризонтальности, поступают на плату сбора данных 3, а затем в цифровой форме вводятся в память персонального компьютера 4. Таким образом, в результате одного измерения формируется два массива числовых данных. Размер массива определяется числом периодов сигналов и частотой дискретизации платы сбора данных. Число периодов влияет на точность определения амплитуды сигнала датчика и его фазового запаздывания относительно сигнала стенда, а также на точность определения основной частоты изменения угла негоризонтальности, имитируемой стендом, при выбранной частоте дискретизации. Платы сбора данных, как правило, имеют минимальную возможную частоту дискретизации. Например, для платы ЛА2М3 PCI фирмы «Руднев-Шиляев» такая частота составляет 1000 Гц, которой вполне достаточно для изучения процессов с частотой не более 1 Гц при собственной неравномерности АЧХ датчика около 5 % [2] и фазовом запаздывании около 10˚. Так как частоты колебаний малы, то для одного эксперимента получается достаточно большой объем числовых данных. Например, для частоты 0.12 Гц для записи 16 полных периодов сигналов стенда требуется не менее 133334 чисел при частоте дискретизации 1 кГц, а всего в результате эксперимента получится в два раза больше числовых данных. Число экспериментов зависит от класса решаемой задачи (научное исследование или калибровка датчика) и системы управление частотой колебаний стенда (какое максимальное разрешение по частоте может быть получено). Как правило таких экспериментов проводится около 10, т. е. экспериментальные АЧХ и ФЧХ датчика негоризонтальности строятся по десяти точкам.
Возникает вопрос о дальнейших операциях над полученными числовыми данными, приводящих к построению экспериментальных АЧХ и ФЧХ датчика. При таком подходе к их построению возможны две альтернативы. Первая из них заключается при построении в одной системе координат для каждого измерения графиков сигналов в какой-либо математической среде и вручную с помощью маркеров определения фазового запаздывания их друг относительно друга и амплитуды сигнала датчика для каждой частоты. Такая альтернатива имеет недостатки, заключающиеся в достаточно большом количестве «измерений маркером», которые нужно выполнить для обеспечения большей точности измерения, а также затруднительности применения этого метода, если сигналы стенда и датчика зашумлены. Шумы указанных сигналов можно разделить на следующие составляющие: низкочастотный, вследствие вибраций стенда и имеющий частоты кратные основной частоте; сетевой шум (50 Гц и кратные гармоники); высокочастотный шум (для сигнала датчика) несущей частоты вследствие неидеальности выходного фильтра электронного узла датчика; случайный шум Найквиста (возникает из шума электронных компонентов измерительной цепи). Вторая альтернатива заключается в автоматизации построения АЧХ и ФЧХ датчика с помощью ЭВМ.
Обобщенный алгоритм автоматизации построения АЧХ и ФЧХ представлен на рисунке 2. Алгоритм фильтрации обобщенно представлен на рисунке 3. С помощью операции быстрого преобразования Фурье находится спектр амплитуд сигнала стенда, основная частота которого совпадает с основной частотой сигнала датчика. Для сигнала, представленного на рисунке 4 такой спектр, представлен на рисунке 5.
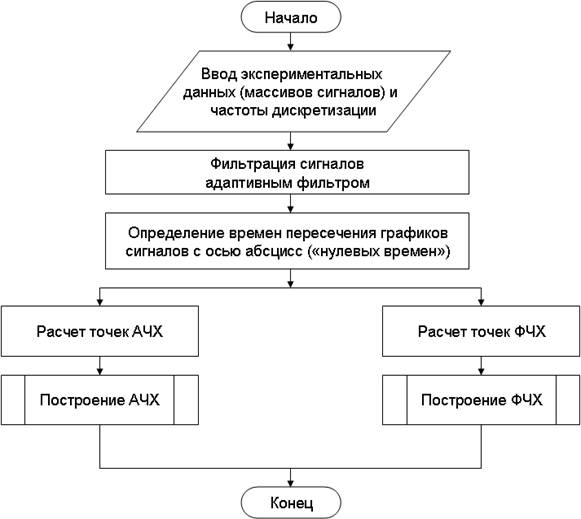
Рисунок 2 – Общий алгоритм автоматизации построения АЧХ и ФЧХ
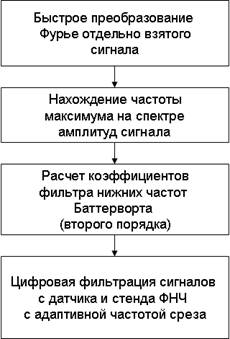
Рисунок 3 – Обобщенный алгоритм фильтрации полученных сигналов

Рисунок 4 – Пример сигнала стенда
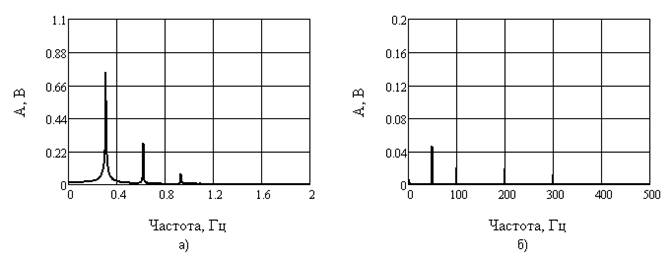
Рисунок 5 – Пример спектра сигнала стенда
а) усеченный спектр; б) полный спектр
Затем находится частота основной составляющей сигнала, соответствующая максимальной амплитуде в спектре. Зная частоту основной составляющей сигнала, находятся коэффициенты цифрового фильтра нижних частот Баттерворта, который имеет минимальную неравномерность АЧХ в полосе пропускания. Частота среза фильтра берется близкой к частоте основной составляющей сигнала датчика. Таким образом, фильтр адаптируется по частоте. Далее следует преобразование сигналов стенда и датчика этим фильтром.
После того, как сигналы будут отфильтрованы, определяются их «нулевые времена», т. е. времена, в которые их графики пересекаются с осью абсцисс (![]() ). Координату этого момента времени можно определить следующим образом: если
). Координату этого момента времени можно определить следующим образом: если  , то
, то ![]() – искомое «нулевое время».
– искомое «нулевое время».
Дальше происходит расчет координат точек и построение экспериментальных АЧХ и ФЧХ следующим образом.
Пусть ![]() – i-е время пересечения z-го сигнала с датчика с осью абсцисс («нулевое время»),
– i-е время пересечения z-го сигнала с датчика с осью абсцисс («нулевое время»), ![]() – i-е время пересечения z-го сигнала стенда с осью абсцисс.
– i-е время пересечения z-го сигнала стенда с осью абсцисс.
Тогда,
- период z-го сигнала ![]() ,
,
- частота сигнала:  ,
,
- фазовая задержка сигнала датчика относительно сигнала стенда: ![]() ,
,
- экспериментальная точка ФЧХ датчика: ![]() ,
,
- времена пиковых значений сигналов с датчика: ![]() ,
,
- определение пиковых значений сигналов:  ,
,
- определение ординаты экспериментальной точки АЧХ: ![]() ,
,
- экспериментальная точка АЧХ датчика: ![]() .
.
При составлении выражений использованы следующие обозначения: ![]() – значение z-го сигнала с датчика в «пиковое время»
– значение z-го сигнала с датчика в «пиковое время» ![]() ,
,  – коэффициент преобразования фильтра нижних частот на частоте
– коэффициент преобразования фильтра нижних частот на частоте ![]() .
.
Для проверки работы алгоритма были смоделированы сигналы с датчика и стенда с соотношением сигнал/шум, равным 10, что близко к реальным измеряемым сигналам. Сигнал датчика также содержал коэффициент АЧХ и фазовую задержку, близкие к расчетным для аналогичных датчиков. Результаты работы алгоритма представлены на рисунках 6-8.
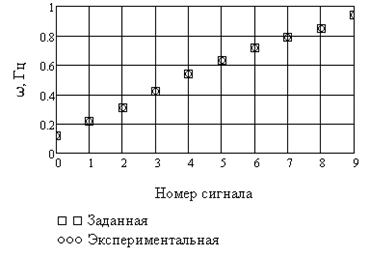
Рисунок 6 – Проверка адекватности алгоритма по определению частоты сигналов
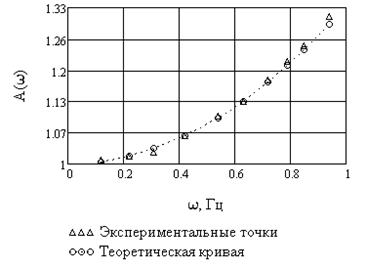
Рисунок 7 – Проверка адекватности алгоритма по построению АЧХ датчика
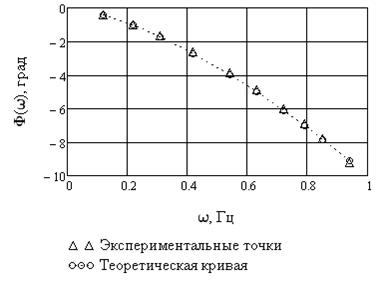
Рисунок 8 – Проверка адекватности алгоритма по построению ФЧХ датчика
На основе анализа рисунков 6-8 можно сделать вывод, что относительная погрешность алгоритма не превышает 1.5 % при построении АЧХ и 2.5 % при построении ФЧХ датчика. Погрешность определения основной частоты сигнала лежит в пределах разрешающей способности амплитудо-частотного спектра Фурье по частоте. Таким образом, описанный выше алгоритм позволяет осуществить автоматизацию построения АЧХ и ФЧХ датчиков негоризонтальности общепринятым классическим способом.
СПИСОК ЛИТЕРАТУРЫ
1 , Есипов характеристики гидроакустических датчиков негоризонтальности // Датчики и системы, 2005. №1. С. 42 – 46
2 , Есипов моделирование гидроакустических датчиков негоризонтальности // Датчики и системы, 2004. №1. С. 15 – 17
ФГОУ ВПО «Государственный университет – учебно-научно-производственный комплекс»
Аспирант кафедры «Приборостроение, метрология и сертификация»
Тел. (48
E-mail: *****@***com
