
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
Ю. П. ЕМЕЛЬЯНОВА[1]
(Арзамасский политехнический институт Нижегородского государственного технического университета имени , Арзамас)
ПОСТРОЕНИЕ АЛГОРИТМОВ СЕТЕВОГО УПРАВЛЕНИЯ С ИТЕРАТИВНЫМ ОБУЧЕНИЕМ НА ОСНОВЕ МОДЕЛЕЙ С ДВУМЕРНОЙ ДИНАМИКОЙ
Рассматривается сетевая система управления, состоящая из множества объектов, каждый из которых должен воспроизводить заданную траекторию движения с требуемой точностью в условиях неопределенности и возможных информационных нарушений в сети. Построена двумерная (2D) модель динамики такой системы. Для достижения требуемой точности предлагается использование алгоритма управления с итеративным обучением. Задача сходимости такого алгоритма в указанных условиях неопределенности и возможных нарушений сведена к исследованию глобальной асимптотической устойчивости в среднем квадратическом (ГАУСК) вспомогательной 2D модели. На основе полученных условий ГАУСК построен сходящийся алгоритм сетевого управления с итеративным обучением. Эффективность алгоритма продемонстрирована на примере упрощенной модели динамики вертикального канала группы портальных роботов.
Введение
В [1,4] решалась задача управления с итеративным обучением для одного объекта. Рассматривались случаи с обратной связи по состоянию и по выходу.
В данной работе дается развитие результатов [1,4] на случай сетевого управления, когда одновременно обучаются несколько связанных систем, обменивающихся информацией друг с другом.
Такая постановка задачи является естественной, поскольку существует большое количество производственных систем, в которых объекты должны периодически повторять одинаковые операции. Обмен информацией между системами в этом случае позволяет повысить качество управления и надежность.
Постановка задачи
Рассматривается множество линейных дискретных систем с неопределенными параметрами:
 (1)
(1)
где ![]() - вектор состояния
- вектор состояния  -й системы,
-й системы, ![]() - вектор управления
- вектор управления ![]() -й системы,
-й системы,  - вектор выходных переменных -й системы,
- вектор выходных переменных -й системы, ![]() - вектор неопределенных параметров,
- вектор неопределенных параметров, ![]() - действительные постоянные матрицы параметров системы,
- действительные постоянные матрицы параметров системы, ![]() - номер системы,
- номер системы, ![]() - число систем.
- число систем.
Для описания неопределенностей используется аффинная модель.
![]() ,
,
где 
![]() - нижняя и верхняя граница элемента
- нижняя и верхняя граница элемента ![]() ,
, ![]() – известные матрицы,
– известные матрицы, ![]()
Обозначим ![]() :
:

конечное множество вершин множества неопределенностей ![]() .
.
Информационные нарушения в сети моделируются однородной марковской цепью с заданным конечным числом состояний ![]() и заданными вероятностями перехода
и заданными вероятностями перехода
![]()
![]()
Системы (1) работают в повторяющемся режиме на заданном конечном интервале времени ![]() с известными начальными условиями. Задача состоит в том, чтобы все системы повторяли заданную траекторию движения
с известными начальными условиями. Задача состоит в том, чтобы все системы повторяли заданную траекторию движения ![]() на конечном интервале
на конечном интервале  с требуемой точностью
с требуемой точностью ![]() .
.
При этом предполагается, что только одна из систем (лидер или ведущий) получает информацию о заданной траектории непосредственно, остальные получают эту информацию от лидера (ведомые).
Предположим, что в какой-либо из систем произошли нарушения, вызванные недостаточной надежностью информационной структуры сети. Тогда эта система начинает получать информацию от другой, информация от которой в данный момент ей доступна. Если доступ к информации от лидера восстанавливается, то система вновь переключается на получение информации от лидера.
При таких условиях для достижения требуемой точности можно предложить следующий подход. Используя информацию с одного или нескольких предыдущих шагов построить алгоритм изменения входной переменной (управления), который позволил бы повысить точность на текущем повторении. Этот подход, активно развивающийся в современной литературе, особенно в задачах робототехники, получил название управления с итеративным обучением [2, 3]. Следуя концепции итеративного обучения входную переменную (управление) на ![]() -м повторении (шаге) зададим в виде
-м повторении (шаге) зададим в виде
 (2)
(2)
где  - корректирующая добавка к управлению на текущем -м шаге для формирования управления для следующего
- корректирующая добавка к управлению на текущем -м шаге для формирования управления для следующего ![]() -го шага.
-го шага.
Таким образом, система (1) с законом управления (2) может быть представлена как 2D система
 (3)
(3)
со следующими с граничными условиями
![]()
Введем в рассмотрение вектор ошибки с координатами
![]()

где ![]() - ошибка обучения ведущей системы,
- ошибка обучения ведущей системы, ![]() - вектор выходных переменных ведущей системы,
- вектор выходных переменных ведущей системы, ![]() - ошибка обучения
- ошибка обучения ![]() -ой ведомой системы,
-ой ведомой системы, ![]() - вектор выходных переменных
- вектор выходных переменных  -ой ведомой системы,
-ой ведомой системы,  - индекс информационной структуры сети, который может принимать любые значения от 1 до
- индекс информационной структуры сети, который может принимать любые значения от 1 до ![]() , исключая свое собственное состояние
, исключая свое собственное состояние ![]() , в зависимости от состояния марковской цепи
, в зависимости от состояния марковской цепи ![]() .
.
Очевидно, что для достижения требуемой точности корректирующая добавка к управлению ![]() должна выбираться из условия сходимости алгоритма управления (2):
должна выбираться из условия сходимости алгоритма управления (2):
![]()
![]()
 .
.
С учетом стохастического характера системы введем следующее определение сходимости.
Определение 1 Алгоритм управления с итеративным обучением (2) называется сходящимся в среднем квадратическом, если для любых начальных условий  и для любой начальной управляющей последовательности
и для любой начальной управляющей последовательности ![]() он задает такую последовательность
он задает такую последовательность ![]() для системы (1), что
для системы (1), что  при
при ![]() ,
,  , где
, где ![]() - оператор математического ожидания.
- оператор математического ожидания.
Условия сходимости алгоритмов управления с итеративным обучением
Для дальнейшего анализа введем следующие вспомогательные переменные:
![]() ,
,
В терминах переменных ![]() и
и ![]() система (1) опишется моделью с двумерной динамикой в стандартной форме линейного дискретного повторяющего процесса:
система (1) опишется моделью с двумерной динамикой в стандартной форме линейного дискретного повторяющего процесса:
![]() (4)
(4)
где 
 ,
,  ,
,
 матрицы
матрицы ![]() имеют случайную структуру, определяемую нарушениями. Если каждая система получает информацию от соседней, эти матрицы имеют вид
имеют случайную структуру, определяемую нарушениями. Если каждая система получает информацию от соседней, эти матрицы имеют вид
 .
.
где зависимость от ![]() для компактности не указана. При нарушениях элементы
для компактности не указана. При нарушениях элементы ![]() и
и ![]() будут оставаться на своих позициях, а другие элементы будут менять значения и позицию на соответствующей строке в зависимости от значения
будут оставаться на своих позициях, а другие элементы будут менять значения и позицию на соответствующей строке в зависимости от значения ![]() .
.
Рассмотрим случай, когда переменные состояния доступны измерению и сформируем корректирующую поправку в виде
![]() (5)
(5)
где 
Тогда уравнения замкнутой системы (4), (5) запишутся в виде:
 (6)
(6)
Граничные условия для системы (4) задаются в виде
![]() ,
,
где ![]() и
и ![]() - векторы, удовлетворяющие условиям:
- векторы, удовлетворяющие условиям:
![]() ,
,  . (7)
. (7)
Определение 2 Систему (4) назовем глобально асимптотически устойчивой в среднем квадратическом (ГАУСК), если при любых граничных условиях ![]() и
и ![]() , удовлетворяющих (7):
, удовлетворяющих (7):
![]() .
.
Если поправка (5) обеспечивает ГАУСК системы (6), то это будет гарантировать сходимость алгоритма управления (2).
Для получения условий ГАУСК воспользуемся методом векторной функции Ляпунова. Рассмотрим векторную функцию
![]() (8)
(8)

Определим оператор ![]() , являющийся дискретным аналогом оператора дивергенции:
, являющийся дискретным аналогом оператора дивергенции:
![]() (9)
(9)
Теорема 1 Рассмотрим систему (6) с граничными условиями, удовлетворяющими (7). Пусть существуют положительные постоянные ![]() такие, что функция (8) и ее оператор (9) в силу системы удовлетворяют неравенствам
такие, что функция (8) и ее оператор (9) в силу системы удовлетворяют неравенствам
![]()



Тогда система (6) глобально асимптотически устойчива в среднем квадратическом.
Доказательство теоремы ввиду ограниченного объема работы не приводится.
Выбирая компоненты векторной функции Ляпунова в виде квадратичных форм:
![]() ,
,
где  , получим условия ГАУСК в виде билинейных матричных неравенств.
, получим условия ГАУСК в виде билинейных матричных неравенств.
 (10)
(10)
Эти билинейные неравенства сводятся к линейным матричным неравенствам, из которых находятся матрицы усиления, гарантирующие ГАУСК системы (6) и соответственно сходимость алгоритма управления с итеративным обучением (2).
Численный пример
На базе полученных результатов было проведено моделирование для упрощенной модели динамики вертикального канала портального робота. Этот робот установлен в Университете Саутгемптона, Великобритания и данные о нем были предоставлены коллегой. На рисунке 1 представлена фотография робота, на рисунке 2 - желаемая траектория робота вдоль вертикальной оси.
Будем предполагать, что таких роботов три и они связаны локальной сетью. При этом один из роботов (лидер или ведущий) получает информацию о заданной траектории непосредственно, остальные либо от лидера, либо в случае потери связи с лидером, друг от друга.
Матрицы параметров ведомых систем ![]() имеют отклонения в пределах 10% от матриц параметров ведущей системы
имеют отклонения в пределах 10% от матриц параметров ведущей системы ![]() .
.
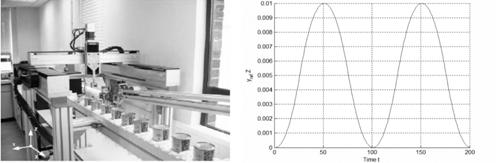
Рис. 1. Портальный робот Рис. 2. Желаемая траектория
на выходе вдоль вертикальной оси
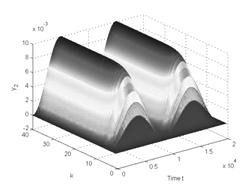
В результате моделирования были получены следующие графики (рисунок 3). На этих графиках представлен случай, когда обе ведомые системы берут информацию у лидера. Первая ведомая система теряет связь с лидером с 5й по 7й шаг и на этом интервале берет информацию у второй ведомой. Вторая же ведомая теряет связь с 10-го по 15-й шаг, на этом интервале берет информацию у первой ведомой.
Из графиков видно, что сходимость сохраняется, но по мере удаления от ведущей системы скорость сходимости снижается. В случае потери связи с лидером нарушается монотонность убывания ошибки, чего не наблюдается в случае, если связь с лидером не теряется.

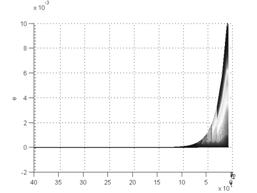
а) выходной сигнал (справа) и ошибка обучения (слева, вид сбоку) ведущей системы
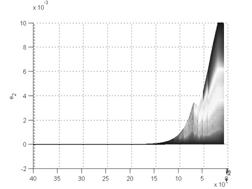
б) выходной сигнал (справа) и ошибка обучения (слева, вид сбоку) первой ведомой системы при потере связи с лидером с 5-го по 7-ой шаг
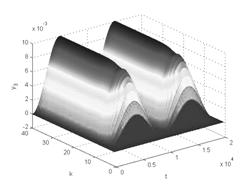
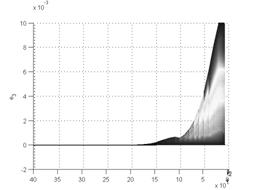
в) выходной сигнал (справа) и ошибка обучения (слева, вид сбоку) второй ведомой системы при потере связи с лидером с 10-го по 15-й шаг
Рис. 3 – Результаты моделирования упрощенной модели динамики вертикального канала группы портальных роботов
Заключение
В работе построена 2D модель динамики сетевой системы управления с итеративным обучением в условиях неопределенности и нарушений информационной структуры сети. Доказана теорема о глобальной асимптотической устойчивости в терминах векторных функций Ляпунова, которая затем применена для получения условий сходимости таких систем и решения задач синтеза управления. Решен численный пример, который определил направление дальнейших исследований, которые будут заключаться в построении алгоритмов, обеспечивающих монотонность сходимости ошибки при информационных нарушениях. Такие алгоритмы должны быть переключаемыми в зависимости от нарушений и содержать прогнозирующие составляющие. В настоящий момент ведется работа по решению задачи сетевого управления с ОС по выходу.
Работа проводилась при поддержке гранта РФФИ .
ЛИТЕРАТУРА
1. Емельянова, Ю. П. Алгоритмы обучения с итеративным обучением системами с неопределенными параметрами и возможными нарушениями // Навигация и управление движением: Материалы докладов XIII конференции молодых ученых "Навигация и управление движением". - СПб.:ГНЦ РФ ОАО "Концерн "ЦНИИ "Электроприбор", 20с.
2. Hyo-Sung, Ahn. Iterative Learning Control: Brief Survey and Categorization // Hyo-Sung Ahn, Yang Quan Chen, and Kevin L. Moore. - IEEE Transactions on systems, man, and cybernetics - part C: Applications and reviews, 2007, Vol. 37, no. 6. - p. .
3. Kurek, J. E. Iterative learning control synthesis based on 2D system theory // J. E. Kurek and M. B. Zaremba - IEEE Transactions on Automatic Control, 1993, no. 38, p. 121-125.
4. Pakshin, P. Iterative Learning Control under Parameter Uncertainty and Failures // P. Pakshin, Emelianova J., et alIEEE Multi-conference on Systems and Control, Croatia, October 3-5, 2012, ISBN: 4504-0.
Текст доклада согласован с научным руководителем.
д. ф.-м. н., профессор ![]() //
//
[1] Научный руководитель д. ф.-м. н., профессор, .
