

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
 . (7.8)
. (7.8)
На рис.7.1 приведены результаты расчетов по формулам (7.6) и (7.8) вероятности подавления импульсной помехи медианным фильтром.
Кривые соответствуют различным апертурам медианного фильтра. Линия, которая соответствует N=1, соответствует отсутствию медианной фильтрации.
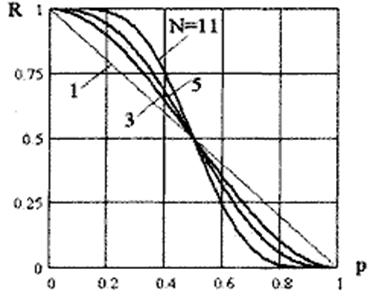
Рис.7.1 Зависимость вероятности подавления импульсной помехи медианным фильтром для потоков Бернулли.
Был выполнен цикл статистического моделирования медианной фильтрации потоков Бернулли и Пуассона с фиксированными и флуктуирующими по закону Рэлея амплитудами. Результаты моделирования показали их хорошее соответствие расчетным значениям вероятности подавления R>0.4. Однако для интенсивных потоков происходит не подавление, а усиление и трансформация его в поток импульсов другой структуры. Например, входной поток может трансформироваться в поток импульсов со случайной длительностью. Очевидно, что медианная фильтрация имеет смысл при ![]() .
.
Медианная фильтрация является нелинейной операцией над входным процессом, изменяющей статистику принятой реализации. Однако некоторые теоретические результаты имеются только по статистике профильтрованного белого шума. Аналитический расчет преобразования статистики коррелированных процессов весьма затруднителен из-за не разработанности соответствующего математического аппарата. Поэтому был использован метод математического моделирования процесса медианной фильтрации принятой смеси с последующей аппроксимацией выходных статистических характеристик.
Исследовалась эволюция первых четырех кумулянтов и корреляционной функции ![]() профильтрованного шума
профильтрованного шума ![]() при обработке стационарного гауссовского процесса
при обработке стационарного гауссовского процесса ![]() с нормированной корреляционной функцией вида
с нормированной корреляционной функцией вида  и
и  .
.
Результаты зависят от соотношения ширины спектра ![]() , периода дискретизации dt и ширины апертуры N. Исследование коэффициентов асимметрии и эксцесса процесса
, периода дискретизации dt и ширины апертуры N. Исследование коэффициентов асимметрии и эксцесса процесса ![]() показало их малость даже для небольших апертур размером N=3…5 отсчетов. Поэтому, одномерное распределение профильтрованного шума можно считать гауссовским.
показало их малость даже для небольших апертур размером N=3…5 отсчетов. Поэтому, одномерное распределение профильтрованного шума можно считать гауссовским.
Удалось определить, что корреляционные свойства шума ![]() зависят от параметра
зависят от параметра  . Если
. Если ![]() , корреляционные функции
, корреляционные функции ![]() и
и  практически совпадают. Если
практически совпадают. Если  , то у процесса
, то у процесса ![]() ширина спектра сужается по сравнению с шириной спектра
ширина спектра сужается по сравнению с шириной спектра ![]() .
.
Моментные функции определялись путем обработки нескольких десятков реализации ![]() длиной от трех до десяти тысяч интервалов корреляции. Тем самым устранялось возможное нарушение эргодичности, связанное с реальным моделированием процессов на основе псевдослучайных датчиков чисел.
длиной от трех до десяти тысяч интервалов корреляции. Тем самым устранялось возможное нарушение эргодичности, связанное с реальным моделированием процессов на основе псевдослучайных датчиков чисел.
В [17] приводится один приближенный подход к расчету , точность которого предположительно возрастает при ![]() . Однако сравнение с результатами моделирования показало его применимость только для узкого диапазона значений параметра
. Однако сравнение с результатами моделирования показало его применимость только для узкого диапазона значений параметра ![]() , внутри которого отклонение точных и расчетных значений
, внутри которого отклонение точных и расчетных значений ![]() меньше 20...30%.
меньше 20...30%.
На рис.7.2 приведены экспериментальные значения нормированной корреляционной функции ![]() при различных значениях параметра m. Пунктиром показана корреляционная функция .
при различных значениях параметра m. Пунктиром показана корреляционная функция .
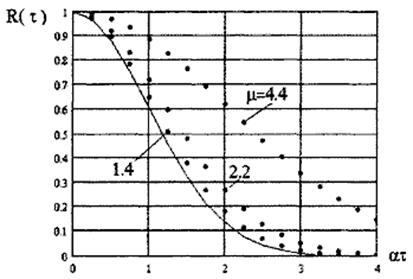
Рис.7.2 Экспериментальный вид нормированной корреляционной функции профильтрованного шума.
Для процессов корреляционной функцией  зависимости аналогичны.
зависимости аналогичны.
Характеристики обнаружения. Итак, после этапа медиальной фильтрации на интервале [0,T] имеется процесс:
 , (7.9)
, (7.9)
где  ;
;  с вероятностью
с вероятностью ![]() , и
, и ![]() с вероятностью
с вероятностью ![]() . Вероятность
. Вероятность ![]() вычисляется в соответствии с формулами (7.5), (7.6) и (7.8), а бегущий индекс k отражает процесс скользящей медианной фильтрации. Процесс Y(t) поступает на приемник, рассчитанный на обработку полезного сигнала
вычисляется в соответствии с формулами (7.5), (7.6) и (7.8), а бегущий индекс k отражает процесс скользящей медианной фильтрации. Процесс Y(t) поступает на приемник, рассчитанный на обработку полезного сигнала  на фоне флуктуационного шума
на фоне флуктуационного шума ![]() . На выходе приемника формируется статистика:
. На выходе приемника формируется статистика:
 . (7.10)
. (7.10)
В выражении (7.10)  - отношение сигнал/шум;
- отношение сигнал/шум; ![]() - решение интегрального уравнения
- решение интегрального уравнения  . Параметр
. Параметр ![]() имеет смысл отношения сигнал/помеха для k–го импульса потока на выходе линейной части приемника:
имеет смысл отношения сигнал/помеха для k–го импульса потока на выходе линейной части приемника:
 . (7.11)
. (7.11)
Нормированные сигнальные функции:
 (7.12)
(7.12)
представляют отклик приемника на сигнальный и помеховый импульсы. Они полагаются непрерывными, а ![]() - дважды дифференцируемой функцией. Причем,
- дважды дифференцируемой функцией. Причем, ![]() ,
, ![]() .
.
Асимптотически оптимальным правилом обнаружения сигнала с неизвестными параметрами является алгоритм принятия решения по методу максимального правдоподобия:
 . (7.13)
. (7.13)
Порог обнаружения h выбирается в соответствии с выбранным критерием. Расчет вероятностей ложной тревоги ![]() и пропуска сигнала
и пропуска сигнала ![]() может быть выполнен по методике, разработанной в [5].
может быть выполнен по методике, разработанной в [5].
Величина абсолютного максимума ![]() ,
,  может быть обусловлена либо полезным сигналом, либо k-м импульсом помехи, либо шумовым выбросом
может быть обусловлена либо полезным сигналом, либо k-м импульсом помехи, либо шумовым выбросом ![]() . Функция распределения абсолютного максимума гауссовского процесса
. Функция распределения абсолютного максимума гауссовского процесса ![]() на интервале [0,T]определяется выражением:
на интервале [0,T]определяется выражением:
 (7.14)
(7.14)
Здесь параметр ![]() имеет смысл числа элементов разрешения по временному положению полезного сигнала на интервале [0,T]. Формула (7.14) асимптотически точна при
имеет смысл числа элементов разрешения по временному положению полезного сигнала на интервале [0,T]. Формула (7.14) асимптотически точна при ![]() и
и  . Обобщая методику расчета
. Обобщая методику расчета ![]() и
и ![]() , можно записать:
, можно записать:
 (7.15)
(7.15)
где:
 ;
;
 .
.
Учитывая, что  , а
, а ![]() можно переписать:
можно переписать:
 .
.
В частном случае одинаковых амплитуд импульсов в потоке ![]() ,
, ![]() . Тогда:
. Тогда:
 .
.
Если этап медианной фильтрации отсутствует, то вероятности ошибок ![]() и
и ![]() имеют вид аналогичный (7.15). Только в этом случае:
имеют вид аналогичный (7.15). Только в этом случае:
 ,
,
где ![]() - вероятность присутствия k-го импульса в потоке Бернулли. Как уже упоминалось,
- вероятность присутствия k-го импульса в потоке Бернулли. Как уже упоминалось, ![]() .
.
На рис.7.3 приведены результаты расчетов вероятности пропуска ![]() при выборе порога h по критерию Неймана - Пирсона при значении
при выборе порога h по критерию Неймана - Пирсона при значении ![]() . Расчет выполнялся для следующих значений параметров:
. Расчет выполнялся для следующих значений параметров:  ,
, ![]() ,
,  ,
, ![]() ,
,  . Ширина апертуры
. Ширина апертуры ![]() соответствует случаю отсутствия медианной фильтрации. Пунктиром показан случай отсутствия импульсной помехи.
соответствует случаю отсутствия медианной фильтрации. Пунктиром показан случай отсутствия импульсной помехи.
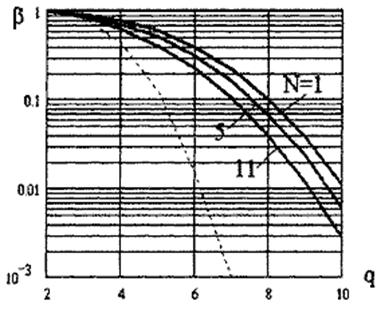
Рис. 7.3 Результаты расчета вероятности пропуска сигнала.
Полученные формулы являются асимптотически точными при  ,
, ![]() и приближенными при конечных значениях указанных параметров. Методом статистического моделирования для частного случая одного и двух мешающих сигналов установлено [5], что совпадение расчетных и экспериментальных значений наблюдается при
и приближенными при конечных значениях указанных параметров. Методом статистического моделирования для частного случая одного и двух мешающих сигналов установлено [5], что совпадение расчетных и экспериментальных значений наблюдается при ![]() ,
,  и порогах h, вероятность превышения которых меньше 0.2,..0.3. Результаты моделирования показали, что при значениях
и порогах h, вероятность превышения которых меньше 0.2,..0.3. Результаты моделирования показали, что при значениях ![]() влиянием остаточной помехи можно пренебречь. Ее учет необходим при
влиянием остаточной помехи можно пренебречь. Ее учет необходим при  , когда амплитуды мешающих сигналов на выходе приемника после двухэтапной обработки соизмерима с амплитудой полезного сигнала.
, когда амплитуды мешающих сигналов на выходе приемника после двухэтапной обработки соизмерима с амплитудой полезного сигнала.
В заключении отметим, что медианная фильтрация на первом этапе целесообразна, только при ![]() , где
, где  - вероятность прохождения импульса помехи через фильтр.
- вероятность прохождения импульса помехи через фильтр.
Алгоритм фильтрации. В связных системах гражданской авиации на современном этапе развитие получают цифровые радиостанции. Наряду с этим возникает проблема избавления от импульсных помех, наиболее нежелательных в цифровых устройствах обработки сигнала.
Введя в структуру приемника медианный фильтр и варьируя ширину его апертуры, мы можем получить эффективное подавление импульсной помехи на выходе.
Исходя из идей медианной фильтрации, возможно, составить алгоритм функционирования такого устройства (рис 7.4).
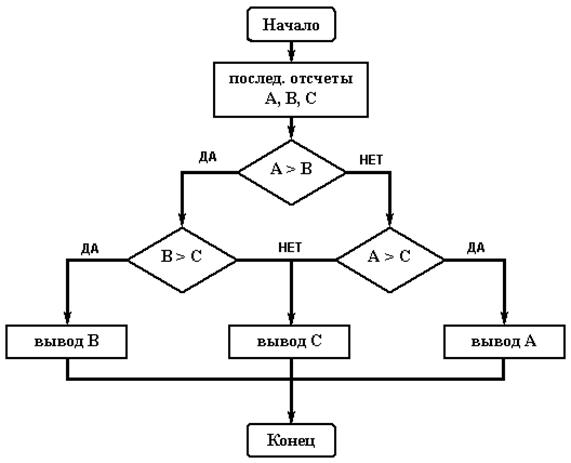
Рис.7.4 Алгоритм функционирования медианного фильтра
Разберём пошагово процесс фильтрации. Берутся три соседних отсчёта цифровой последовательности полезного сигнала, обозначенные по мере их поступления А, В, С соответственно. Далее они сравниваются согласно алгоритму, и берётся среднее значение (медиана). Это значение и есть истинное значение на выходе фильтра.
Поскольку в первый момент времени мы имеем один единственный отсчёт, который будет являться максимальным значением из трёх, т. к. остальные два равны нулю, поэтому среднее будет тоже ноль. Такая ситуация в нашем примере эквивалентна задержке сигнала на один такт. Соответственно если апертура фильтра будет увеличиваться, будет возрастать задержка в соответствие формуле:
 . (7.16)
. (7.16)
На рис. 5 приведена структурная схема фильтра с шириной апертуры равной 3, составленная по этому алгоритму.
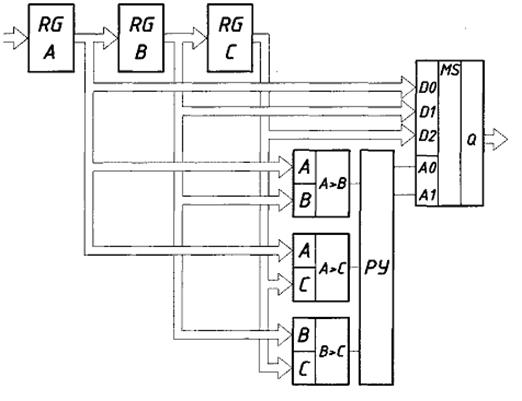
Рис.7.5 Структурная схема медианного фильтра
с шириной апертуры равной 5.
Цифровой код в начальный момент времени записан в регистр. На первом рабочем такте он поступает с выхода регистра А на сравнивающие устройства и на мультиплексор. Сигнал решающего устройства (РУ) обрабатывает сигналы компараторов и выдает на мультиплексор адрес коммутируемого канала. Таким образом, требуемое значение поступает на выход фильтра.
Проделанные вычисления и синтез медианного фильтра позволяют нам судить о его целесообразности использования сложности реализации.
Для интенсивных потоков медианная фильтрация становится неэффективной. Метод медианной фильтрации может стать полезным дополнением к процедуре помехоустойчивого кодирования - декодирования, особенно в случае интенсивных помех, приводящих к появлению кратных ошибок.
Также надо отметить, что этот метод достаточно широко распространен и популярен в процессе обработки изображения.
7.2 Адаптивная фильтрация поляризованных сигналов.
Рассматривается работа фильтра поляризованного сигнала, при условии, что известна одна из характеристик поляризационного сигнала - модуль поляризационного коэффициента r, и фоном (помехой) являются - поляризованная коррелированная помеха и белый гауссов шум приемных каналов. Представлена схема и показаны графики зависимости коэффициента улучшения ![]() от различных значений фаз векторов помехи
от различных значений фаз векторов помехи ![]() и сигнала
и сигнала ![]() .
.
Одной из характеристик поляризованного сигнала является модуль поляризационного коэффициента  , где
, где ![]() и
и ![]() - амплитуды огибающих ортогонально поляризованных компонент сигнала.
- амплитуды огибающих ортогонально поляризованных компонент сигнала.
Величина r, различна для различных классов сигналов и помех. Поэтому представляется естественным использование поляризационных характеристик для селекции сигналов, наблюдаемых на фоне коррелированных помех с иной поляризационной структурой.
Рассмотрим работу фильтра поляризованного сигнала с известным значением модуля поляризационного коэффициента r на фоне поляризованной коррелированной помехи и белого гауссова шума приемных каналов. Схема адаптивного поляризационного фильтра представлена на рис.7.6, а на рис.7.7 показана векторная диаграмма поляризованных сигналов.
Рис.7.6 Схема адаптивного поляризационного фильтра.
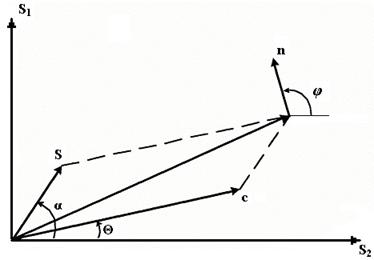
Рис.7.7 Векторная диаграмма поляризованных сигналов
На входы фильтра поступают смеси сигналов
 (7.17)
(7.17)
где: ![]() и
и ![]() - ортогональные составляющие входного сигнала; c и
- ортогональные составляющие входного сигнала; c и ![]() , s и
, s и ![]() , n и
, n и ![]() - модуль и фаза вектора помехи, сигнала и шума соответственно.
- модуль и фаза вектора помехи, сигнала и шума соответственно.
В дальнейшем полагаем, что фазы векторов ![]() и
и ![]() - медленно меняющиеся функции времени и остаются постоянными на интервале наблюдения входной смеси (7.17), а вектор
- медленно меняющиеся функции времени и остаются постоянными на интервале наблюдения входной смеси (7.17), а вектор ![]() - быстрофлюктуирующий с дисперсией при равномерном распределении фазы в интервале (0,2p),
- быстрофлюктуирующий с дисперсией при равномерном распределении фазы в интервале (0,2p), ![]() .
.
Сигнал на выходе X не будет содержать составляющих фильтруемого сигнала s, т. к.  и
и ![]() .
.
Запишем выражение для выходных сигналов фильтра:
 ,
,
 .
.
Можно показать, что средние значения квадратов сигналов на выходах фильтра в предположении, что сигналы и некоррелированы, имеют вид:
 (7.18)
(7.18)
 (7.19)
(7.19)
где:  и
и  - косинусная и синусная составляющие мощности сигнала;
- косинусная и синусная составляющие мощности сигнала;
![]() и
и ![]() - мощности ошибки (дисперсия) оценки мощности сигнала.
- мощности ошибки (дисперсия) оценки мощности сигнала.
Выражения (7.18) и (7.19) позволяют определить оптимальные значения коэффициентов W1 и W2, минимизирующие среднеквадратическое отклонение оценки мощности сигнала. Значения оптимальных коэффициентов определяются из уравнения:
 . (7.20)
. (7.20)
решение которого дает:
 ,
,
 .
.
Весовые коэффициенты W1 и W2 являются функциями параметров ![]() ,
, ![]() и s и не могут быть вычислены и введены в систему априорно. Однако они могут быть определены на основе адаптивного подхода. Рассматривая выходные сигналы фильтра как функцию ошибки адаптивной системы, и применяя алгоритм минимума среднеквадратического отклонения Уидро-Хопфа, итерации для весов W1 и W2 можно записать в виде:
и s и не могут быть вычислены и введены в систему априорно. Однако они могут быть определены на основе адаптивного подхода. Рассматривая выходные сигналы фильтра как функцию ошибки адаптивной системы, и применяя алгоритм минимума среднеквадратического отклонения Уидро-Хопфа, итерации для весов W1 и W2 можно записать в виде:
где m - константа, управляющая скоростью сходимости и стабильностью алгоритма.
Оптимальное значение отношения ![]() по мощности на выходах фильтра:
по мощности на выходах фильтра:
 ,
,
где:
![]() ; (7.21)
; (7.21)
![]() ; (7.22)
; (7.22)
![]() ; (7.23)
; (7.23)
![]() ; (7.24)
; (7.24)
 ; (7.25)
; (7.25)
 ; (7.26)
; (7.26)
 (7.27)
(7.27)
- отношение помеха/шум.
Коэффициент улучшения отношения ![]() , определяемый выражением:
, определяемый выражением:
имеет вид:
 . (7.28)
. (7.28)
Графики зависимости коэффициента улучшения kу от значений ![]() приведены на рис.7.8.
приведены на рис.7.8.
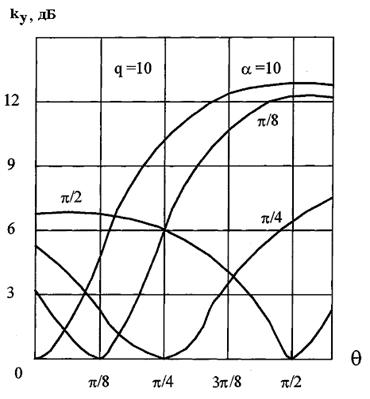
Рис.7.8 Графики зависимости коэффициента улучшения kу
Анализ выражения (7.28) показывает, что эффективность подавления помехи существенно зависит от отношения помеха/шум q. Например, для  ,
, ![]() ,
,  дБ коэффициент улучшения составляет 19 дБ, а при
дБ коэффициент улучшения составляет 19 дБ, а при ![]() дБ -
дБ -  дБ. Этот эффект объясняется влиянием на коэффициенты быстро флюктуирующего белого шума.
дБ. Этот эффект объясняется влиянием на коэффициенты быстро флюктуирующего белого шума.
Список литературы.
1. , , и др. Теория обнаружения сигналов /Под ред. М.: Радио и связь, 1984.
2. Большаков потока сигналов из шума. М.: Сов. радио, 1969.
3. Быков моделирование в статистической радиотехнике. М.: Сов. радио, 1971.
4. Быстрые алгоритмы в цифровой обработке изображений. Преобразования и медианные фильтры /Под ред. : Радио и связь, 1984.
5. Ван Теория обнаружения, оценок и модуляции /Под ред. Т.1. М.: Сов. радио, 1972.
6. , Скороход случайных процессов. Т.2. М.: Наука, 1973.
7. , Рыжик интегралов, сумм, рядов и произведений. М.: Наука, 1971.
8. Защита от радиопомех /Под ред. М.: Сов. радио, 1976.
9. Дж., Цифровые фильтры и их применение. М.: Энергоатомиздат, 1983.
10. Лезин в теорию и технику радиотехнических систем. М.: Радио и связь, 1986.
11. Лелом теория стационарных случайных функций. Л.: Гидрометеоиздат, 1981.
12. Помехозащищенность радиосистем со сложным сигналом /Под ред. М.: Радио и связь,1985.
13. Седякин теории случайных импульсных потоков. М.: Сов. радио, 1965.
14. , , Бортановский описания, анализа и синтеза нелинейных систем управления. Учебное пособие. М.: МАИ, 1993.
15. К теории оптимального обнаружения произвольных сигналов на фоне произвольных помех. Изв. АН СССР. Радиофизика, 1971, т.14, №10, с.1526…1530.
16. Тихонов радиотехника. М.: Радио и связь, 1982.
17. Тихонов анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991.
18. Финк передачи дискретных сообщений. М.: Сов. радио, 1970.
Приложение 1. Вероятностные характеристики обобщенной огибающей негауссовского случайного процесса. Алгоритмы и ПМО.
Рис. П1.1 Алгоритм вычислений при известной функции W(R).
Рис. П1.2 Алгоритм вычислений для определения Функции F(z).
Содержание.
Введение……………………………………………………………………………. 3
4. Статистические характеристики смеси сигналов и помех…………………Параметры распределения…………………………………………… 4 4.1.1. Огибающая функции распределения вероятности суммарного сигнала…………………………………………… 4 4.1.2. Метод временной дискретизации для нахождения распределения длительности выбросов огибающей нормального шума…………………………………………….Дисперсия числа выбросов в реализации случайного сигнала…………………………………………………………..Вероятностные характеристики обобщенной огибающей негауссовского случайного процесса………………………………..Вероятностные характеристики обобщенной огибающей…..Вероятностные характеристики гармонического колебания с заданным распределением амплитуды…………………….................................................... 16
5. Инерционно-нелинейный метод подавления негауссовских узкополосных помех……………………………………………………………………………..Эффективность и оптимизация ИНП………………………………..Инерционно-нелинейное подавление помех узкополосного типаНегауссовская помеха гармонического типа……………………….. 30
6. Влияние помех на цифровые устройства……………………………………Вероятностный анализ дешифратора………………………………..Вероятность прохождения сигнала через дешифратор……Вероятность ложной тревоги и вероятность искажений…….Оценка воздействия помеховых сигналов на решающее устройство приемного тракта цифрового РЭО……………………..Анализ воздействия квазисинхронной помехи на цифровой 45 приемник……………………………………………………………… 6.4. Прогнозирование защищенности дискретных сигналов от помех... 52
7. Некоторые способы фильтрации цифровых помех…………………………..Цифровая фильтрация импульсной помехи в медианном фильтре………………………………………………………………Адаптивная фильтрация поляризованных сигналов……………….. 67
Список литературы………………………………………………………………… 73
Приложение 1. Вероятностные характеристики обобщенной огибающей негауссовского случайного процесса. Алгоритмы и ПМО…… 75

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
