
Суммируя отдельные смещения конечной точки хода, получим поперечную невязку u'.
u'=∆u1'+∆u2'+….+∆un'. (13)
Подставим в выражение 13 значения отдельных смещений(12), получим
u'= (S1+ S2+…+ Sn)![]() + (S2+ S3+…+ Sn)
+ (S2+ S3+…+ Sn)![]() +…+ Sn
+…+ Sn![]() . (14)
. (14)
Предположим
S1= S2=…= Sn =S.
Тогда (14) примет вид
u'= S∙n![]() +S(n-1)
+S(n-1) ![]() +….+S
+….+S . (15)
. (15)
Переходя к СКО получим срюквю значение поперечной невязки
(mu')2=S2{n2+(n-1)2+…+12}![]() , (16)
, (16)
но 12+22+…+n2=![]() . (17)
. (17)
Тогда
(mu')2= 
![]() , (18)
, (18)
Преобразуем выражение. Умножим числитель и знаменатель правой части на n и положим, что
S∙n = L, тогда формула 18 примет вид
mu'= L  (19)
(19)
Ср. кв. поперечная невязка зависит от длины хода, количества линий и точности измерения углов.
Лекция 7 Предварительные вычисления в полигонометрии:
1 Обработка результатов полевых измерений.
2
1ОБРАБОТКА РЕЗУЛЬТАТОВ ПОЛЕВЫХ ИЗМЕРЕНИЙ
Начинают работу с проверки всех записей в полевых журналах включая и все вычисления, затем составляют рабочие схемы ходов.
При обработке журналов линейных измерений вычисляют длины линий по соответствующим формулам в зависимости от способа их измерения. Далее вычисляют горизонтальные проложения путём введения в измеренные линии поправки за наклон местности, вычисляемой по формуле
∆Sh= - ( ),
),
где h – превышение между конечными точками измеряемой линии;
l – длина измеряемой линии.
Полученные горизонтальные проложения линий необходимо спроектировать на плоскость в проекции Гаусса и привести к уровню моря.
Для получения линий в проекции Гаусса в горизонтальные проложения вводятся поправки, которые вычисляют по формуле
∆Sy =  ,
,
где S'- горизонтальное проложение линии;
Ym – берётся с карты на район работ);
Rm – радиус земного шара = 6371 км.
Поправки ∆Sy всегда положительны, т. к. линия в проекции Гаусса больше, чем её измеренное значение на эллипсоиде.
Для приведения линии к уровню моря используют формулу
∆SH = - 
где Hm – средняя высота измеренной линии над уровнем моря (берётся с карты на район работ).
Для большей части территории России поправка ∆SH отрицательна, а в районах, расположенных ниже уровня моря (Прикаспийская низменность) она положительна.
При обработке журналов измерения углов подсчитывают окончательные значения углов или средние значения приведённых направлений и производят оценку точности. При необходимости вводят поправки за центрировку и редукцию.
Предварительные вычисления в полигонометрии
Лекция 8 Передача и вычисление координат
Уравнивание полигонометрического хода любой формы, опирающегося на исходные пункты и направления
1 Определение числа избыточных измерений в полигонометрическом ходе.
2 Определение весов и обратных весов.
3 Уравнивание полигонометрического хода любой формы, опирающегося на исходные пункты и направления
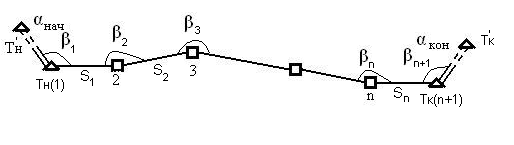
Рисунок - Схема полигонометрического хода
Измерения: n – число сторон;
n+1 – число углов.
1 Определение числа избыточных измерений в полигонометрическом ходе.
Уравнивание начинают с подсчета числа избыточных измерений (условий), возникающих в ходе.
Как известно число избыточных измерений может быть подсчитано по формуле
r = n΄ - k, (1)
где n΄ - число всех измерений;
k – число необходимых измерений (число неизвестных)
При проложении полигонометрического хода измеряют n – сторон и n+1 углов, то есть производят всего измерений
n΄ = 2n + 1
Неизвестными, подлежащими определению в ходе, являются координаты его вершин. Всего пунктов в ходе n+1, но координаты двух из них Tн и Tк известны, следовательно, надо определить n + 1 - 2 = n – 1 пунктов.
Для каждого пункта надо найти X и Y – два неизвестных. Тогда общее число неизвестных будет равно:
k = 2 (n - 1)
Подставим найденные значения n΄ и k в формулу (1) и получим:
r = 2 n +1 – 2 (n – 1) = 3
То есть будет три избыточных измерения: это измерения улов  и линии
и линии ![]()
2 Определение весов и обратных весов
3 Уравнивание полигонометрического хода любой формы, опирающегося на исходные пункты и направления
Каждое избыточное измерение приводит к математическому состоянию между истинными значениями измеренных величин, то есть в геодезической сети возникает r условий:
![]()
j=1, 2…r
т. е. здесь r функций или r уравнений: ![]()
Это исходная система условных уравнений связи.
Первое условие возникает из связи углов поворота с исходными начальным ![]() и конечным
и конечным ![]() дирекционными углами. Оно может быть выражено так:
дирекционными углами. Оно может быть выражено так:
![]() (1)
(1)
Второе и третье условие вытекают из связи приращений координат с исходными начальными ![]() и конечными
и конечными ![]() координатами:
координатами:
![]() (2)
(2)
![]() (3)
(3)
Штрихи y невязок ![]() и
и ![]() обозначают, что эти невязки получены по приращениям, вычисленным по измеренным углам.
обозначают, что эти невязки получены по приращениям, вычисленным по измеренным углам.
В общем виде три условных уравнения поправок выглядят так:
 (4)
(4)
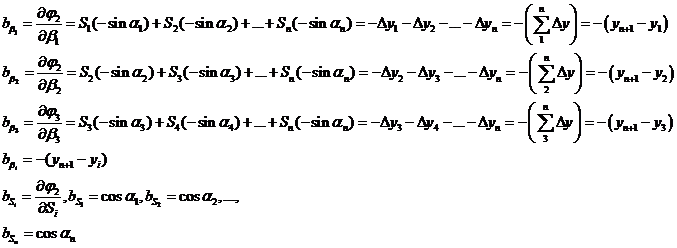
где ![]() - неизвестные поправки к результатам измерений, которые надо найти, решив систему (4),
- неизвестные поправки к результатам измерений, которые надо найти, решив систему (4),
![]() - коэффициенты при поправках.
- коэффициенты при поправках.
Обозначили:
Частные производные от 1-ой функции ![]()
от 2-ой функции ![]()
от 3-ей функции ![]()
То есть
![]() , где
, где
![]()
![]() - результаты измерений (n+1) углов и n сторон
- результаты измерений (n+1) углов и n сторон
т. е. ![]() для углов
для углов ![]() и
и
![]() для сторон S
для сторон S
Найдем каждые частные производные от 1-ой функции:
![]()

![]()
(т. е. ![]() ) (5)
) (5)
Тогда первое уравнение из системы (4) представим в виде:
![]() (6)
(6)
Из (5) вытекает, что
![]() ;
; ![]()
Тогда формула (6) примет вид
 (7)
(7)
Уравнение вида (7) называется условным уравнением поправок дирекционных улов.
Второе уравнение связи:
![]() (8)
(8)
Величины ![]() , тогда уравнение (8) примет вид
, тогда уравнение (8) примет вид
![]() (9)
(9)
![]() ; где
; где
![]() - это уравнение (9), а
- это уравнение (9), а
![]() - результаты измерений:
- результаты измерений:
для углов i = 1, 2, 3…n+1,
для сторон i = 1, 2, 3…n.
![]()
В формуле (9) распишем значения ![]() . Их иначе можно представить как:
. Их иначе можно представить как:
учитывая этот вывод и то, что ![]() , получим
, получим
Следовательно
 (11)
(11)
Уравнение вида

в развернутом виде представим как
![]() (12)
(12)
С учетом формул (10) и (11) выражение (12) примет вид:
![]() (13)
(13)
Третье уравнение связи
![]() (14)
(14)
представим в виде
![]() (15)
(15)
![]() (16)
(16)
3-е условное уравнение поправок в общем виде представим
 где (17)
где (17)
 где
где ![]() - это уравнение (16),
- это уравнение (16),
а ![]() - результаты измерений
- результаты измерений
Если принять во внимание, что:
и что ![]() то
то
![]()
![]()
![]() (18)
(18)
 (19)
(19)
Уравнение (17) в развернутом виде:

По условным уравнениям вида:
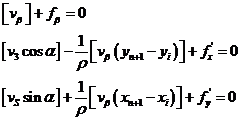
Составляют таблицу коэффициентов условных уравнений. В графу 1 этой таблицы выписывают (n+1) – поправок в углы и n – поправок в линии; в графу 2 – обратные веса измеренных углов и линий.
 и
и  , в графы 3, 4 и 5 – коэффициенты условных уравнений при поправках, которые обозначают в 1ом уровне через
, в графы 3, 4 и 5 – коэффициенты условных уравнений при поправках, которые обозначают в 1ом уровне через ![]() , во втором – через
, во втором – через ![]() , в третьем – через
, в третьем – через ![]() .
.
Общий вид таблицы коэффициентов условных и нормальных уравнений коррелат при уравнивании полигонального хода.
Поправки |
|
|
|
|
|
| +1 +1 +1 . . . +1 |
. . .
|
. . .
|
|
| 0 0 . . . 0 |
|
|
|
|
|
| |
|
|
| ||
|
|

Далее в этой же таблице по коэффициентам условных уравнений составляют таблицу коэффициентов нормальных уравнений коррелат, общий вид которых представим как:
Выражения для коэффициентов нормальных уравнений коррелат  должны включать в себя сумму произведений коэффициентов при поправках в углах и сумму произведений коэффициентов при поправках в линии, поэтому они состоят из двух слагаемых и имеют вид, представленный в таблице.
должны включать в себя сумму произведений коэффициентов при поправках в углах и сумму произведений коэффициентов при поправках в линии, поэтому они состоят из двух слагаемых и имеют вид, представленный в таблице.
Нормальные уравнения коррелат решаются методом последовательного исключения неизвестных или другим способом и находят коррелаты ![]() и
и ![]() .
.
Установим веса:
Обратные веса
![]()
Так как число уравнений r = 3, то уравнение поправок выглядит следующим образом:
![]()
Установлено
![]()
То
![]()
Установлено:

То
![]()
Поправки в дирекционные углы получаются по поправкам ![]() по формуле
по формуле

Уравненные углы, дирекционные углы и линии находят путем введения поправок ![]() в соответствующие измеренные значения.
в соответствующие измеренные значения.
Уравненные приращения координат находят по уравненным дирекционным углам и линиям.
Заключительным контролем при этом являются равенства

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
