
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Пятиступенчатый конвейер:
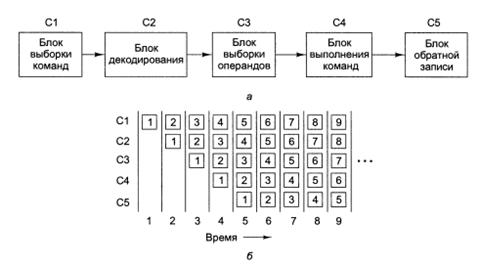
Первая ступень (блок С1) вызывает команду из памяти и помещает ее в буфер, где она хранится до тех пор, пока не потребуется. Вторая ступень (блок С2) декодирует эту команду, определяя ее тип и тип ее операндов. Третья ступень (блок СЗ) определяет местонахождение операндов и вызывает их из регистров или из памяти. Четвертая ступень (блок С4) выполняет команду, обычно проводя операнды через тракт данных. И наконец, блок С5 записывает результат обратно в нужный регистр.
На рис. б мы видим, как действует конвейер во времени. Во время цикла 1 блок С1 обрабатывает команду 1, вызывая ее из памяти. Во время цикла 2 блок С2 декодирует команду 1, в то время как блок С1 вызывает из памяти команду 2. Во время цикла 3 блок СЗ вызывает операнды для команды 1, блок С2 декодирует команду 2, а блок С1 вызывает команду 3. Во время цикла 4 блок С4 выполняет команду 1, СЗ вызывает операнды для команды 2, С2 декодирует команду 3, а С1 вызывает команду 4. Наконец, во время цикла 5 блок С5 записывает результат выполнения команды 1 обратно в регистр, тогда как другие ступени конвейера обрабатывают следующие команды.
Зависимость по данным в узле конвейера
Процессор без конвейера выполняет команды с частотой N. Разделим вычисление команды на M одинаковых частей по длительности. Конвейер может работать с частотой N*M. Если конвейер загружен без задержки, то после переходного процесса, n-1 блоков, будем иметь скорость выполнения K=N*M2
Но в работе конвейера возникают конфликты:
Конфликты – это такие ситуации в конвейерной обработке, которые препятствуют выполнению очередной команды в предназначенном для нее такте.
Конфликты делятся на три группы:
- структурные, по управлению, по данным.
Структурные конфликты возникают в том случае, когда аппаратные средства процессора не могут поддерживать все возможные комбинации команд в режиме одновременного выполнения с совмещением.
Причины структурных конфликтов.
Не полностью конвейерная структура процессора, при которой некоторые ступени отдельных команд выполняются более одного такта.Пусть этап выполнения команды i+1 занимает 3 такта. Тогда диаграмма работы конвейера будет иметь вид, представленный в таблица 11.3.
Таблица 11.3. | |||||||||||
Команда | Такт |
| |||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| ||
i | IF | ID | OR | EX | WB |
| |||||
i+1 | IF | ID | OR | EX | EX | EX | WB |
| |||
i+2 | IF | ID | OR | O | O | EX | WB |
| |||
i+3 | IF | ID | OR | O | O | EX |
| ||||
i+4 | IF | ID | OR | O | O |
| |||||
При этом в работе конвейера возникают так называемые "пузыри" (обработка команд i+2 и следующих за ней, начиная с такта 6), которые снижают производительность процессора.
Эту ситуацию можно было бы ликвидировать двумя способами. Первый предполагает увеличение времени такта до такой величины, которая позволила бы все этапы любой команды выполнять за один такт. Однако при этом существенно снижается эффект конвейерной обработки, так как все этапы всех команд будут выполняться значительно дольше, в то время как обычно нескольких тактов требует выполнение лишь отдельных этапов очень небольшого количества команд. Второй способ предполагает использование таких аппаратных решений, которые позволили бы значительно снизить затраты времени на выполнение данного этапа (например, использовать матричные схемы умножения). Но это приведет к усложнению схемы процессора и невозможности реализации на этой БИС других, функционально более важных, узлов. Так как представленная в таблица 11.3 ситуация возникает при реализации команд, относительно редко встречающихся в программе, то обычно разработчики процессоров ищут компромисс между увеличением длительности такта и усложнением того или иного устройства процессора.
Одним из типичных примеров служит конфликт из-за доступа к запоминающим устройствам. Из таблица 11.1 видно, что в случае, когда операнды и команды находятся в одном запоминающем устройстве, начиная с такта 3, работу конвейера придется постоянно приостанавливать, поскольку различные команды в одном и том же такте обращаются к памяти на считывание команды, выборку операнда, запись результата.
Борьба с конфликтами такого рода проводится путем увеличения количества однотипных функциональных устройств, которые могут одновременно выполнять одни и те же или схожие функции. Например, в современных микропроцессорах обычно разделяют кэш-память для хранения команд и кэш-память данных, а также используют многопортовую схему доступа к регистровой памяти, при которой к регистрам можно одновременно обращаться по одному каналу для записи, а по другому - для считывания информации. Конфликты из-за исполнительных устройств обычно сглаживаются введением в состав микропроцессора дополнительных блоков. Так, в микропроцессоре Pentium-4 предусмотрено 4 АЛУ для обработки целочисленных данных. Процессоры, имеющие в своем составе более одного конвейера, называются суперскалярными.
Недостатком суперскалярных микропроцессоров является необходимость синхронного продвижения команд в каждом из конвейеров. В таблица 11.4 представлена последовательность выполнения команд в микропроцессоре, имеющем два конвейера, при условии, что команде К1 требуется 3 такта на этапе EX.
Таблица 11.4. | |||||||||||||||
Этап | Такт |
| |||||||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 |
| ||||||||
IF | K1 | K2 | K3 | K4 | K5 | K6 | K7 | K8 | K7 | K9 | K7 | K10 | K11 | K12 |
|
ID | K1 | K2 | K3 | K4 | K5 | K6 | K5 | K8 | K5 | K9 | K7 | K10 |
| ||
OR | K1 | K2 | K3 | K4 | K3 | K6 | K3 | K8 | K5 | K9 |
| ||||
EX | K1 | K2 | K1 | K4 | K1 | K6 | K3 | K8 |
| ||||||
WB | K2 | K4 | K1 | K6 |
| ||||||||||
При этом команды будут завершаться в последовательности
К2-К4-К1-К6-...
Следовательно, для обеспечения правильной работы суперскалярного микропроцессора при возникновении затора в одном из конвейеров должны приостанавливать свою работу и другие. В противном случае может нарушиться исходный порядок завершения команд программы. Но такие приостановки существенно снижают быстродействие процессора. Разрешение этой ситуации состоит в том, чтобы дать возможность выполняться командам в одном конвейере вне зависимости от ситуации в других конвейерах. Это приводит к неупорядоченному выполнению команд. При этом команды, стоящие в программе позже, могут завершиться ранее команд, стоящих впереди. Аппаратные средства микропроцессора должны гарантировать, что результаты выполненных команд будут записаны в приемник в том порядке, в котором команды записаны в программе. Для этого в микропроцессоре результаты этапа выполнения команды обычно сохраняются в специальном буфере восстановления последовательности команд. Запись результата очередной команды из этого буфера в приемник результата проводится лишь после того, как выполнены все предшествующие команды и записаны их результаты.
Конфликты по управлению возникают при конвейеризации команд переходов и других команд, изменяющих значение счетчика команд.
Суть конфликтов этой группы наиболее удобно проиллюстрировать на примере команд условного перехода. Пусть в программе, представленной в таблица 11.1, команда i+1 является командой условного перехода, формирующей адрес следующей команды в зависимости от результата выполнения команды i. Команда i завершит свое выполнение в такте 5. В то же время команда условного перехода уже в такте 3 должна прочитать необходимые ей признаки, чтобы правильно сформировать адрес следующей команды. Если конвейер имеет большую глубину (например, 20 ступеней), то промежуток времени между формированием признака результата и тактом, где он анализируется, может быть еще большим. В инженерных задачах примерно каждая шестая команда является командой условного перехода, поэтому приостановки конвейера при выполнении команд переходов до определения истинного направления перехода существенно скажутся на производительности процессора.
Наиболее эффективным методом снижения потерь от конфликтов по управлению служит предсказание переходов. Суть данного метода заключается в том, что при выполнении команды условного перехода специальный блок микропроцессора определяет наиболее вероятное направление перехода, не дожидаясь формирования признаков, на основании анализа которых этот переход реализуется. Процессор начинает выбирать из памяти и выполнять команды по предсказанной ветви программы (так называемое исполнение по предположению, или "спекулятивное" исполнение). Однако так как направление перехода может быть предсказано неверно, то получаемые результаты с целью обеспечения возможности их аннулирования не записываются в память или регистры (то есть для них не выполняется этап WB), а накапливаются в специальном буфере результатов.
Если после формирования анализируемых признаков оказалось, что направление перехода выбрано верно, все полученные результаты переписываются из буфера по месту назначения, а выполнение программы продолжается в обычном порядке. Если направление перехода предсказано неверно, то буфер результатов очищается. Также очищается и конвейер, содержащий команды, находящиеся на разных этапах обработки, следующие за командой условного перехода. При этом аннулируются результаты всех уже выполненных этапов этих команд. Конвейер начинает загружаться с первой команды другой ветви программы. Так как конвейерная обработка эффективна при большом числе последовательно выполненных команд, то перезагрузка конвейера приводит к значительным потерям производительности. Поэтому вопросам эффективного предсказания направления ветвления разработчики всех микропроцессоров уделяют большое внимание.
Методы предсказания переходов делятся на статические и динамические. При использовании статических методов до выполнения программы для каждой команды условного перехода указывается направление наиболее вероятного ветвления. Это указание делается или программистом с помощью специальных средств, имеющихся в некоторых языках программирования, по опыту выполнения аналогичных программ либо результатам тестового выполнения программы, или программой-компилятором по заложенным в ней алгоритмам.
Методы динамического прогнозирования учитывают направления переходов, реализовывавшиеся этой командой при выполнении программы. Например, подсчитывается количество переходов, выполненных ранее по тому или иному направлению, и на основании этого определяется направление перехода при следующем выполнении данной команды.
В современных микропроцессорах вероятность правильного предсказания направления переходов достигает 90-95 %.
Конфликты по данным возникают в случаях, когда выполнение одной команды зависит от результата выполнения предыдущей команды.
При обсуждении этих конфликтов будем предполагать, что команда i предшествует команде j.
Существует несколько типов конфликтов по данным.
Конфликты типа RAW (Read After Write): команда j пытается прочитать операнд прежде, чем команда i запишет на это место свой результат. При этом команда j может получить некорректное старое значение операнда.Проиллюстрируем этот тип конфликта на примере выполнения команд, представленных в таблица 11.1. Пусть выполняемые команды имеют следующий вид:
i) ADD R1,R2; R1 = R1+R2 i+1=j) SUB R3,R1; R3 = R3-R1
Команда i изменит состояние регистра R1 в такте 5. Но команда i+1 должна прочитать значение операнда R1 в такте 4. Если не приняты специальные меры, то из регистра R1 будет прочитано значение, которое было в нем до выполнения команды i.
Уменьшение влияния конфликта типа RAW обеспечивается методом обхода (продвижения) данных. В этом случае результаты, полученные на выходах исполнительных устройств, помимо входов приемника результата передаются также на входы всех исполнительных устройств микропроцессора. Если устройство управления обнаруживает, что данный результат требуется одной из последующих команд в качестве операнда, то он сразу же, параллельно с записью в приемник результата, передается на вход исполнительного устройства для использования следующей командой.
Конфликты типа RAW обусловлены именно конвейерной организацией обработки команд.
Главной причиной двух других типов конфликтов по данным является возможность неупорядоченного выполнения команд в современных микропроцессорах, то есть выполнение команд не в том порядке, в котором они записаны в программе.
Конфликты типа WAR (Write After Read): команда j пытается записать результат в приемник, прежде чем он считается оттуда командой i, При этом команда i может получить некорректное новое значение операнда:i) ADD R1,R2 i+1 =j) SUB R2,R3
Этот конфликт возникнет в случае, если команда j вследствие неупорядоченного выполнения завершится раньше, чем команда i прочитает старое содержимое регистра R2.
Конфликты типа WAW (Write After Write): команда j пытается записать результат в приемник, прежде чем в этот же приемник будет записан результат выполнения команды i, то есть запись заканчивается в неверном порядке, оставляя в приемнике результата значение, записанное командой i:i) ADD R1,Rj) SUB R1,R3
Устранение конфликтов по данным типов WAR и WAW достигается путем отказа от неупорядоченного исполнения команд, но чаще всего путем введения буфера восстановления последовательности команд.
Как отмечалось выше, наличие конфликтов приводит к значительному снижению производительности микропроцессора. Определенные типы конфликтов требуют приостановки конвейера. При этом останавливается выполнение всех команд, находящихся на различных стадиях обработки (до 20 ти команд в Pentium-4). Другие конфликты, например, при неверном предсказанном направлении перехода, ведут к необходимости полной перезагрузки конвейера. Потери будут тем больше, чем более длинный конвейер используется в микропроцессоре. Такая ситуация явилась одной из причин сокращения числа ступеней в микропроцессорах последних моделей. Так, в микропроцессоре Itanium конвейер содержит всего 10 ступеней. При этом его тактовая частота составляет около 1 МГц. Однако на каждой ступени выполняется больше функциональных действий, чем в Pentium-4
Динамическое исполнение команд
Основная идея динамической оптимизации - снятие требования о выполнении команд в строгом порядке.
Обычно производится расщепление блока декодирования на две ступени:
Выдача (декодирование команд, проверка структурных конфликтов)
Чтение операндов (ожидание отсутствия конфликтов по данным и последующее чтение операндов). В общем случае необходимо строгую последовательность команд преобразовать в другую последовательность, чтобы команды могли выполняться параллельно (чтобы команды были независимы)
CPI (cycles per instruction) – количество тактов процессора на инструкцию.
Для начала запишем выражение, определяющее среднее количество тактов для выполнения команды в конвейере:
CPI конвейера = CPI идеального конвейера +
+ Приостановки из-за структурных конфликтов +
+ Приостановки из-за конфликтов типа RAW +
+ Приостановки из-за конфликтов типа WAR +
+ Приостановки из-за конфликтов типа WAW +
+ Приостановки из-за конфликтов по управлению
CPI идеального конвейера есть не что иное, как максимальная пропускная способность, достижимая при реализации. Уменьшая каждое из слагаемых в правой части выражения, мы минимизируем общий CPI конвейера и таким образом увеличиваем пропускную способность команд. Это выражение позволяет также охарактеризовать различные методы, которые будут рассмотрены в этой главе, по тому компоненту общего CPI, который соответствующий метод уменьшает. На рис. показаны некоторые методы, которые будут рассмотрены, и их воздействие на величину CPI.
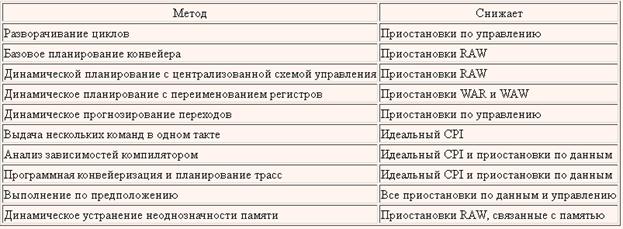
рисунок
Самый простой и общий способ увеличения степени параллелизма, доступного на уровне команд, является использование параллелизма между итерациями цикла. Этот тип параллелизма часто называется параллелизмом уровня итеративного цикла. Ниже приведен простой пример цикла, выполняющего сложение двух 1000-элементных векторов, который является полностью параллельным:
for (i = 1; i <= 1000; i = i + 1)
x[i] = x[i] + y[i];
Каждая итерация цикла может перекрываться с любой другой итерацией, хотя внутри каждой итерации цикла практическая возможность перекрытия небольшая.
Имеется несколько методов для превращения такого параллелизма уровня цикла в параллелизм уровня команд. Эти методы основаны главным образом на разворачивании цикла либо статически, используя компилятор, либо динамически с помощью аппаратуры. Ниже в этом разделе мы рассмотрим подробный пример разворачивания цикла.
Важным альтернативным методом использования параллелизма уровня команд является использование векторных команд. По существу векторная команда оперирует с последовательностью элементов данных. Например, приведенная выше последовательность на типичной векторной машине может быть выполнена с помощью четырех команд: двух команд загрузки векторов x и y из памяти, одной команды сложения двух векторов и одной команды записи вектора-результата. Конечно, эти команды могут быть конвейеризованными и иметь относительно большие задержки выполнения, но эти задержки могут перекрываться. Векторные команды и векторные машины заслуживают отдельного рассмотрения, которое выходит за рамки данного курса. Хотя разработка идей векторной обработки предшествовала появлению большинства методов использования параллелизма, которые рассматриваются в этой главе, машины, использующие параллелизм уровня команд постепенно заменяют машины, базирующиеся на векторной обработке.
Динамическая оптимизация с централизованной схемой обнаружения конфликтов
В конвейере с динамическим планированием выполнения команд все команды проходят через ступень выдачи строго в порядке, предписанном программой (упорядоченная выдача). Однако они могут приостанавливаться и обходить друг друга на второй ступени (ступени чтения операндов) и тем самым поступать на ступени выполнения неупорядочено. Централизованная схема обнаружения конфликтов представляет собой метод, допускающий неупорядоченное выполнение команд при наличии достаточных ресурсов и отсутствии зависимостей по данным. Впервые подобная схема была применена в компьютере CDC 6600.
Задачей централизованной схемы обнаружения конфликтов является поддержание выполнения команд со скоростью одна команда за такт (при отсутствии структурных конфликтов) посредством как можно более раннего начала выполнения команд. Таким образом, когда команда в начале очереди приостанавливается, другие команды могут выдаваться и выполняться, если они не зависят от уже выполняющейся или приостановленной команды.
Централизованная схема несет полную ответственность за выдачу и выполнение команд, включая обнаружение конфликтов. Подобное неупорядоченное выполнение команд требует одновременного нахождения нескольких команд на стадии выполнения. Этого можно достигнуть двумя способами:
· реализацией в процессоре либо множества неконвейерных функциональных устройств,
· путем конвейеризации всех функциональных устройств.
Обе эти возможности по сути эквивалентны с точки зрения организации управления. Поэтому предположим, что в машине имеется несколько не конвейерных функциональных устройств.
В нашем случае централизованная схема обнаружения конфликтов имеет смысл только для устройства плавающей точки. Предположим, что имеются два умножителя, один сумматор, одно устройство деления и одно целочисленное устройство для всех операций обращения к памяти, переходов и целочисленных операций. Каждая команда проходит через централизованную схему обнаружения конфликтов, которая определяет зависимости по данным; этот шаг соответствует стадии выдачи команд и заменяет часть стадии ID в нашем конвейере. Эти зависимости определяют затем моменты времени, когда команда может читать свои операнды и начинать выполнение операции. Если централизованная схема решает, что команда не может немедленно выполняться, она следит за всеми изменениями в аппаратуре и решает, когда команда сможет выполняться. Эта же централизованная схема определяет также когда команда может записать результат в свой регистр результата. Таким образом, все схемы обнаружения и разрешения конфликтов здесь выполняются устройством центрального управления. Каждая команда проходит четыре стадии своего выполнения. (Поскольку в данный момент мы интересуемся операциями плавающей точки, мы не рассматриваем стадию обращения к памяти).
Алгоритм Томасуло
Другой подход к параллельному выполнению команд при наличии конфликтов был использован в устройстве плавающей точки в машине IBM 360/91. Эта схема приписывается Р. Томасуло и названа его именем. Разработка IBM 360/91 была завершена спустя три года после выпуска CDC 6600, прежде чем кэш-память появилась в коммерческих машинах. Задачей IBM было достижение высокой производительности на операциях с плавающей точкой, используя набор команд и компиляторы, разработанные для всего семейства 360, а не только для приложений с интенсивным использованием плавающей точки.
Схема Томасуло имеет много общего со схемой централизованного управления CDC 6600, однако имеются и существенные отличия.
Во-первых, обнаружение конфликтов и управление выполнением являются распределенными – станции резервирования (reservation stations) в каждом функциональном устройствеопределяют, когда команда может начать выполняться в данном функциональном устройстве. В CDC 6600 эта функция централизована.
Во-вторых, результаты операций посылаются прямо в функциональные устройства, а не проходят через регистры. В IBM 360/91 имеется общая шина результатов операций (которая называется общей шиной данных (common data bus - CDB)), которая позволяет производить одновременную загрузку всех устройств, ожидающих операнда. CDC 6600 записывает результаты в регистры, за которые ожидающие функциональные устройства могут соперничать. Кроме того, CDC 6600 имеет несколько шин завершения операций (две в устройстве ПТ), а IBM 360/91 - только одну. В устройствах ПТ на базе алгоритма Томасуло станции резервирования хранят команды, которые выданы и ожидают выполнения в соответствующем функциональном устройстве, а также информацию, требующуюся для управления командой, когда ее выполнение началось в функциональном устройстве. Буфера загрузки и записи хранят данные поступающие из памяти и записываемые в память. Регистры ПТ соединены с функциональными устройствами парой шин и одной шиной с буферами записи. Все результаты из функциональных устройств и из памяти посылаются на общую шину данных, которая связана со входами всех устройств за исключением буфера загрузки. Все буфера и станции резервирования имеют поля тегов, используемых для управления конфликтами. В отличие от централизованной схемы управления, имеется всего три стадии выполнения команды:

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 |
