
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
|
Рисунок 16 Пример представления двух кластеров в ортонормированной системе координат |
Значения ЭВ, рассчитанные СВРК и БИПР-7А, подвергаются кластеризации (выделению классов, обладающих общими свойствами, например, ТВС, находящиеся на одной орбите симметрии).
Анализ проводится для каждого момента времени. Определяется положение классов в новой системе координат (как это показано на рисунке 16) и находится расстояние между центрами классов СВРК и БИПР-7А. Анализ изменения этого расстояния во времени для каждого класса, дает возможность сказать, какая из используемых моделей (ПО) СВРК описывает состояние активной зоны наиболее «близко» к эталону, полученному в результате расчетов по программе БИПР-7А.
3.1.3 Результат анализа состояния измерительной системы контроля ЭВ в активной зоне реактора ВВЭР-1000
В качестве примера работы алгоритма рассмотрена работа СВРК на втором блоке Калининской АС в процессе 19 топливной кампании ( гг.).
Состояние активной зоны было описано совокупностью векторов, координаты i-го вектора представлялись следующим образом:
Пусть ![]() - j-ая координата вектора
- j-ая координата вектора ![]() (показание ДПЗ i-го КНИ на высоте j). Тогда координата вектора пересчитывается как
(показание ДПЗ i-го КНИ на высоте j). Тогда координата вектора пересчитывается как
| ( 3.4 ) |
где ![]() - среднее на симметричных участках (орбитах симметрии) ЭВ на высоте j (измерение ЭВ датчиком j).
- среднее на симметричных участках (орбитах симметрии) ЭВ на высоте j (измерение ЭВ датчиком j).
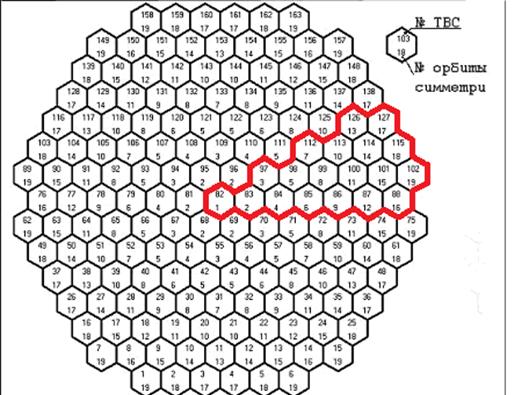
На картограмме, представленной на рисунке 17, показано положение симметричных, по физическим характеристикам, ТВС.
|
Рисунок 17 Положение симметричных, по физическим характеристикам, ТВС Сектор симметрии 30° выделен красным цветом |
Состояние измерительной системы представлено на рисунке 18. Как видно из рисунка, основная часть КНИ образует достаточно плотную группу, разброс внутри группы обусловлен статистическим разбросом измерений. Среднеквадратичное отклонение, рассчитанное для совокупности измерений, составляет 1.13.
|
Рисунок 18 Представление показаний ДПЗ в первых двух главных компонентах. II блок Калининской АС, 10 эфф. сут (до отбраковки) [σ = 1.13]. |
Корреляционная матрица R для данной выборки имеет вид:
Собственные значения для корреляционной матрицы R, в порядке убывания:
 ,
,  .
.
Вклад собственных векторов в описание дисперсии данных:
Собственные векторы матрицы R (компоненты векторов записаны в строку):
Из общей группы выделяются каналы №№ 54 и 57. После анализа показаний ДПЗ в данных каналах было выявлено, что показания ДПЗ №3 в каждом из КНИ занижены на ![]() .
.
После отбраковки этих датчиков показания СВРК стали удовлетворительными, см. рис.19. Показания измерительной системы образуют плотную группу, разброс в которой носит статистический характер и значительно меньше, чем в состоянии, которое демонстрирует рисунок 18. Среднеквадратичное отклонение, рассчитанное для совокупности измерений (рис.19), составляет 0.12, что примерно на порядок меньше, значения до отбраковки.
|
Рисунок 19 Представление показаний ДПЗ в первых двух главных компонентах. II блок Калининской АС, 10 эфф. сут (после отбраковки) [σ = 0.12]. |
3.1.4 Анализ программного обеспечения СВРК ВВЭР-1000
Алгоритм сравнения работы различных вычислительных комплексов СВРК, а именно программ восстановления поля ЭВ был применен к первому блоку Калининской АС. На этом блоке параллельно используется две модели ПО СВРК верхнего уровня – это ВМПО «Хортица» и «Хортица-М». Выбор в пользу одной из систем осложняется тем, что построенные на основе одинаковых алгоритмов, две системы дают различные результаты восстановленного поля ЭВ. Необходимо оценить, какое из ПО наиболее адекватно восстанавливает поле ЭВ.
В качестве примера на рисунке 20 представлено изменение евклидова расстояния в системе координат первых двух главных компонент во времени для 12-й орбиты симметрии:
| ( 3.5 ) |
где см. рис.16:
![]() - координаты центра класса расчетных значений ЭВ ПО «Хортица М»;
- координаты центра класса расчетных значений ЭВ ПО «Хортица М»;
![]() - координаты центра класса расчетных значений ЭВ ПО «Хортица»;
- координаты центра класса расчетных значений ЭВ ПО «Хортица»;
![]() - координаты центра класса расчетных значений ЭВ по программе БИПР-7А.
- координаты центра класса расчетных значений ЭВ по программе БИПР-7А.
В качестве эталона использовались результаты расчетов БИПР-7А. ![]() – характеризует среднее отклонение расчетов, выполненных ПО СВРК, от расчетов по программе БИПР.
– характеризует среднее отклонение расчетов, выполненных ПО СВРК, от расчетов по программе БИПР.
|
Рисунок 20 Величина среднего отклонения от расчетов БИПР для различных видов ПО. 12-я орбита симметрии 1 блок Калининской АС. |
Из рисунка 20 видно, что результаты расчетов по программе «Хортица» более правильно описывают поле ЭВ, чем «Хортица М».
На рис. 21 и 22 представлены средние значения отклонений расчетов ПО СВРК различных версий от эталонного расчета по БИПР-7А и дисперсия этих отклонений.
Анализ результатов показывает, что ПО «Хортица» рассчитывает поле ЭВ более правильно.
|
Рисунок 21 Среднее значение отклонения с 0 по 259 эффективные сутки. Блок №1 Калининской АС. |
|
Рисунок 22 Дисперсия отклонения с 0 по 259 эффективные сутки. Блок №1 Калининской АС. |
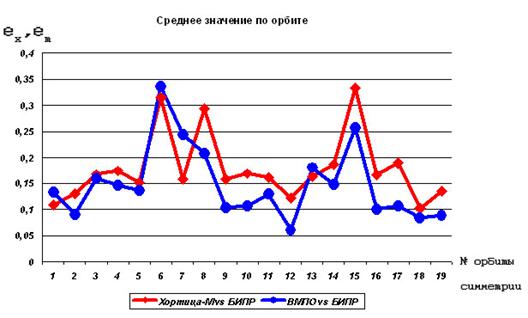
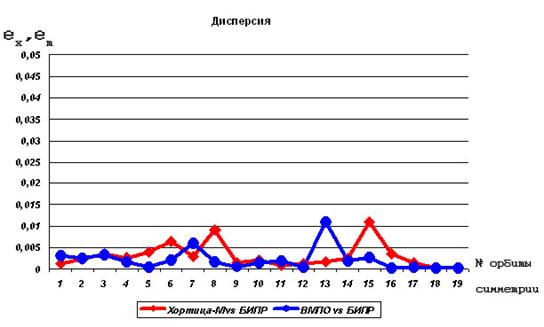
Из графиков рис.21, 22 видно, что расчетные значения ЭВ ПО СВРК на орбитах симметрии № 6, 8, 13, 15 имеют большую погрешность, что может быть связано с наличием кластеров рабочих групп ОР СУЗ или отсутствием датчиков на данных орбитах.
На рис. 23 показан характерный для ПО «Хортица» график отклонения от расчетов БИПР-7А. Его вид определяется регламентом (через 20 эфф. суток) корректировки коэффициентов физической модели, используемой ПО «Хортица». Из графика можно сделать вывод о том, что если проводить корректировку чаще, то ПО «Хортица» будет производить восстановление поля ЭВ еще более точно.
|
Рисунок 23 Величина среднего отклонения от расчетов БИПР для различных видов ПО. 15-я орбита симметрии 1 блок Калининской АС. |
|
Рисунок 24 Величина среднего отклонения от расчетов БИПР для различных видов ПО. |
Рис. 24 демонстрирует момент нарушения работы ПО «Хортица». Резкое отклонение измеренных значений ЭВ от расчетных со 180 суток связано с несоответствием коэффициентов физической модели реальному выгоранию топлива в активной зоне и требуется корректировка коэффициентов адаптации.
Таким образом, методика позволяет заблаговременно определить момент наступления нарушения адекватного описания поля ЭВ ПО СВРК, и своевременно корректировать коэффициенты адаптации модели.
3.1.5 Выводы по разделу 3.1
Основным достоинством представленного метода при анализе состояния измерительной системы ВРК является то, что он позволяет установить точные критерии «физичности» ее показаний. С доверительной вероятностью 95% определяется является ли отклонение измерения результатом развития физического процесса в активной зоне или же неисправностью измерительной системы.
Состояние измерительной системы в каждый момент времени представляется в наглядном виде. Определяются неисправные каналы, а также изменения состояния активной зоны, связанные с физическим процессом.
Неоспоримым преимуществом данного метода является его быстродействие и наглядность, обработка данных занимает не более 1 секунды работы центрального процессора современного персонального компьютера (процессорного времени). Используемые в настоящее время для анализа состояния активной зоны и измерительной системы динамические расчеты и метод исключенного ДПЗ занимают гораздо больше процессорного времени, что не позволяет использовать их в режиме «on line» для представления состояния измерительной системы ВРК.
Проведенный разработанным методом анализ ПО СВРК 1 блока КлнАЭС показал, что «старая версия» более адекватно описывает распределение ЭВ активной зоне. Таким образом, метод может быть использован, как объективная оценка ПО на каждой АЭС, использующей свое ПО.
Таким образом, разработанный метод анализа показаний СВРК позволяет:
- определять недостоверные показания измерительной системы СВРК, не обнаруженные системой;
- определять отклонения в состоянии активной зоны, обусловленные физическим процессом;
- оценивать работоспособность СВРК;
- выполнять сравнительный анализ различного ПО СВРК;
- оценивать необходимость корректировки коэффициентов физической модели ПО СВРК.
3.2 Оперативный контроль изменения состояния активной зоны с помощью представления активной зоны эталонным графом
3.2.1 Представление состояния активной зоны минимальным остовным деревом
В рамках предложенного подхода к анализу данных СВРК представим состояние активной зоны в некоторый момент времени связным неориентированным ациклическим взвешенным графом (деревом) [58; 72 – 75]:
| ( 3.6 ) |
где: ![]() - множество вершин (измерительных каналов); N - число вершин дерева;
- множество вершин (измерительных каналов); N - число вершин дерева;  - подмножество пар
- подмножество пар ![]() - множество ребер;
- множество ребер;
y - весовая функция, ставящая в соответствие каждой паре вершин дерева некоторое число, характеризующее «близость» параметров в пространстве измерений, совокупность которых характеризует данное состояние активной зоны.
Веса ребер, соединяющих соседние вершины i и j, выбираются в соответствии с правилом:
| ( 3.7 ) |
где yik - значения весовой функции для пары вершин i, k. N - число измерительных каналов (КНИ и термопар). Тогда граф G с учетом (3.7) согласно определению является минимальным остовным деревом G0, однозначно представляющим состояние активной зоны.
3.2.2 Выбор весовой функции
Весовая функция ставит в соответствие каждой паре данных ![]() , где
, где ![]() - данные измерительной системы i-го и j-го измерительных каналов, некоторое число
- данные измерительной системы i-го и j-го измерительных каналов, некоторое число ![]() , характеризующее степень “близости“ между ними на множестве измерений. Весовая функция должна удовлетворять следующим формальным требованиям:
, характеризующее степень “близости“ между ними на множестве измерений. Весовая функция должна удовлетворять следующим формальным требованиям:
| ( 3.8 ) |
Кроме формальных требований (3.8) необходимо учитывать физические особенности задачи.
В один класс должны объединяться:
- близкие по величине измерения;
- для выявления локальных зон повышенного или заниженного ЭВ в объединении преимущество должно отдаваться показаниям геометрически близко расположенных измерительных каналов.
В процессе анализа различных мер близости [57] наиболее приемлемой в смысле интерпретации результатов классификации оказалась мера вида:
| ( 3.9 ) |
где:
![]() нормированные показания измерительных каналов i и j соответственно;
нормированные показания измерительных каналов i и j соответственно; ![]() угол между векторами, соединяющими центр активной зоны с i-м и j-м каналами измерения;
угол между векторами, соединяющими центр активной зоны с i-м и j-м каналами измерения; ![]() расстояние между измерительными каналами i и j.
расстояние между измерительными каналами i и j.
Показания измерительной системы СВРК нормировали следующим образом:
энерговыделение:
| ( 3.10 ) |
![]() - количество каналов нейтронных измерений (КНИ),
- количество каналов нейтронных измерений (КНИ),
![]() - суммарное измеренное ЭВ в j - ом КНИ,
- суммарное измеренное ЭВ в j - ом КНИ,
| ( 3.11 ) |

- среднее значение суммарного ЭВ в активной зоне,
| ( 3.12 ) |
- средний радиус множества значений суммарного ЭВ;
температурный контроль:
| ( 3.13 ) |
![]() - количество каналов температурного контроля,
- количество каналов температурного контроля,
| ( 3.14 ) |
- среднее значение температуры над ТВС,
![]() - показания j-ой термопары над ТВС,
- показания j-ой термопары над ТВС,
| ( 3.15 ) |
- средний радиус множества значений температур над ТВС.
3.2.3 Контроль за состоянием активной зоны
Описания (3.6, 3.7) используются для решения задачи контроля изменения состояния активной зоны реактора ВВЭР-1000 в процессе эксплуатации. После отбраковки недостоверных показаний измерительной системы строится минимальное остовное дерево (момент времени t0), где веса ребер определяются в соответствии со значением меры близости (3.9) по правилу (3.7) , которое принимается за эталон. Далее, в следующие моменты времени (tm) или для следующих состояний активной зоны, которые для условности назовем текущими, строится дерево, изоморфное эталонному и находятся наиболее деформированные поддеревья по отношению к эталону[58].
Для численной оценки степени деформации текущего состояния определяем следующие характеристики:
| ( 3.16 ) |
- наибольший вес ребра в данном узле эталонного дерева,
где Ni - число вершин, смежных с вершиной i по траектории дерева;
![]() образ наибольшего веса ребра по узлу эталона на дереве текущего состояния, представляющий собой вес ребра, имеющего в эталонном дереве вес (3.16);
образ наибольшего веса ребра по узлу эталона на дереве текущего состояния, представляющий собой вес ребра, имеющего в эталонном дереве вес (3.16);
| ( 3.17 ) |
- усредненная, без максимальной, мера близости по узлу эталона;
| ( 3.18 ) |
- образ усредненной меры близости эталона на дереве текущего состояния;
| ( 3.19 ) |
- узловая неравномерность (рассчитывается для эталонного и текущего состояний).
После того, как найдены характеристики (3.16-3.19), для каждого узла определяем деформацию:
| ( 3.20 ) |
Интерес представляют те узлы, деформация Ri которых превышает заранее заданную величину, определяемую по опыту эксплуатации активной зоны. Для описания состояния вводится массив двухкомпонентных векторов. Первой компонентой является деформация узла, а второй - разность нормированных показаний измерительного канала для текущего и эталонного состояний:
| ( 3.21 ) |
Первая компонента векторов Ri (3.20) определяет деформацию поля ЭВ, а вторая - изменение параметров в соответствующих измерительных каналах.
Использование изменения параметра по отношению к эталону, а не абсолютного значения позволяет совместно анализировать показания КНИ и ТП и исключить влияние систематической погрешности измерительных каналов на результаты.
3.2.4 Анализ результатов
В качестве примера работы алгоритма рассмотрены несколько состояний активной зоны блока №2 Калининской АС во время 20 топливной кампании ( гг.).
На рисунках 25 и 26 показано нормальное состояние активной зоны:
|
|
Рисунок 25 Представление состояния активной зоны массивом двухкомпонентных векторов | Рисунок 26 Картограмма активной зоны |
| - ТВС в нормальном состоянии |
| - ТВС без средств контроля. |

Массив двухкомпонентных векторов (рис.25) образует общий класс, в котором отклонения от средней величины носят статистический характер. Анализ картограммы активной зоны показал (рис.26) отсутствие аномалий в ее состоянии и оно было принято за эталон.
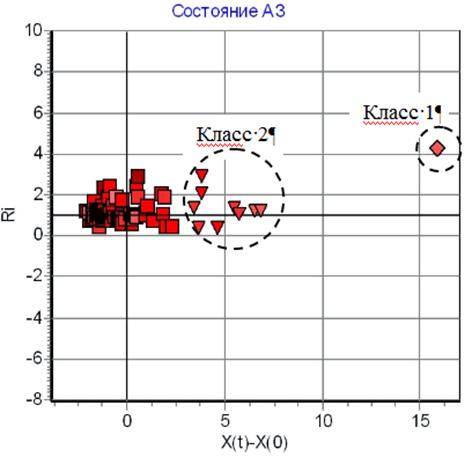
На рисунках 27, 28 показано состояние активной зоны при падении органа регулирования системы управления и защиты (ОР СУЗ) в ТВС № 000.
| ||
Рисунок 27 Представление состояния активной зоны массивом двухкомпонентных векторов | ||
♦ – первый класс показаний | ▼ – второй класс показаний | ■ – общий класс показаний |

Чтобы проанализировать это состояние с помощью штатных систем представления информации, оператору, управляющему реакторной установкой, необходимо:
- вызвать видеофрагмент показаний положения ОР СУЗ и убедиться, что в ТВС № 000 орган регулирования изменил свое положение;
- чтобы исключить ошибку в системе контроля положения ОР СУЗ, вызвать видеофрагмент коэффициентов неравномерности ЭВ в активной зоне (Kq) рассчитанных по показаниям ДПЗ и убедиться в снижении ЭВ в ТВС № 000;
- в ТВС № 000 нет КНИ, поэтому, для исключения ошибки ПО СВРК, проанализировать показания шести ионизационных камер (ИК) аппаратуры контроля нейтронного потока (АКНП). Отличие в их показаниях характерно для состояния активной зоны с упавшим ОР СУЗ;
- чем меньше глубина погружения органа регулирования, тем меньше отличие в показаниях ИК, поэтому для окончательного вывода о падении ОР СУЗ нужно вызвать видеофрагмент показаний температур на выходе из ТВС, убедится, что в окружении ТВС № 000 пониженная температура.
|
|
| |
|
| ||
Рисунок 28 Картограмма активной зоны |
| ||
| - ТВС в нормальном состоянии; |
| - ТВС без средств контроля; |
| - ТВС с пониженным относительным энерговыделением. |
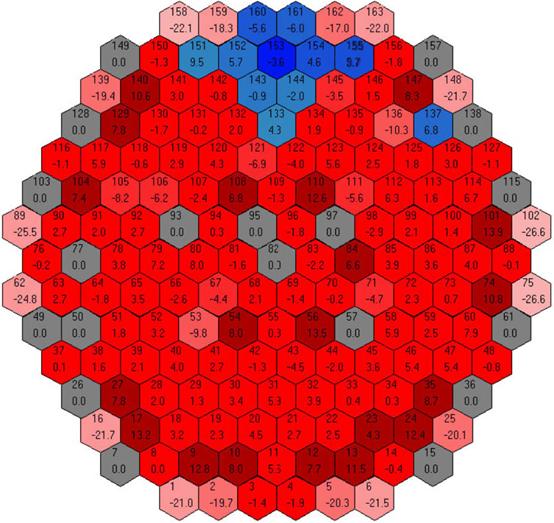
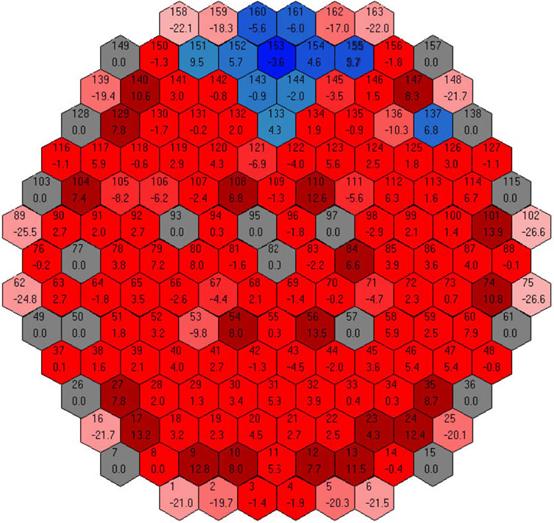

Обработка данных с помощью алгоритма определения изменения в состоянии активной зоны упрощает идентификацию этого состояния и представлена на рис.27. Показания измерительного канала в ТВС № 000 резко отличаются от остальных. В ТВС № 000 расположен упавший ОР СУЗ.
Одновременно определилось состояние ТВС 133, 143, 144, 151, 152, 154, 155, 160, 161 как отдельный класс 2, которое обусловлено возмущением ЭВ в кассетах, связанное с падением ОР СУЗ.
Кластеризация выполняется при помощи критерия согласия χ2 [67; 68; 71]. В соответствии с ним, если набор дискретных значений с доверительной вероятностью 95% отвечает нормальному закону распределения по критерию χ2, то такие данные объединяются в общую группу (класс). Значения, которые не попали в этот класс, подвергаются кластеризации по тому же критерию и так далее, пока все данные не будут распределены по группам.
Данные обработки представлены на картограмме АЗ (рис.28).
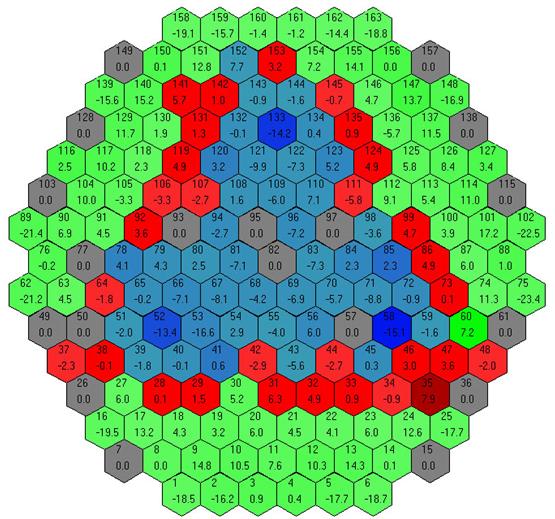
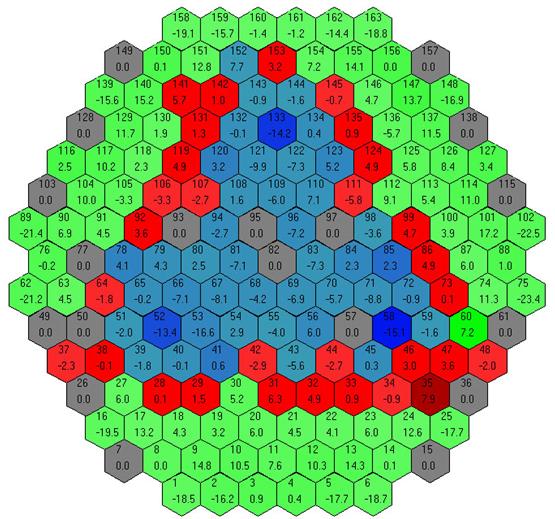
На рисунках 29, 30 показано состояние активной зоны при срабатывании ускоренной предупредительной защиты (УПЗ).
В результате срабатывания УПЗ мощность РУ и активной зоны снижается до ~50% от номинальной. ОР СУЗ, выбранные в группу УПЗ по результатам расчета НФХ активной зоны для текущей кампании, погружаются в активную зону за время 1,2 – 4 с. Для данной кампании – это ОР СУЗ в ячейках №№ 52, 58, 82, 133 (рис.30). Дополнительно к УПЗ, РУ разгружается аппаратурой разгрузки и ограничения мощности (РОМ) до уровня, соответствующего текущему составу работающего оборудования РУ. РОМ погружает в активную зону с рабочей скоростью (2 см/с) ОР СУЗ 10, 9 и 8 групп. Движение начинают ОР СУЗ группы № 10, следующая группа начинает движение после того, как предыдущая пройдет половину высоты активной зоны [56; 76 – 78].
|
|
Обработка показала, что в рассматриваемом состоянии (рис.29) общий класс показаний измерительных каналов СВРК разделяется на несколько подклассов.
|
| |
Рисунок 29 Представление состояния активной зоны массивом двухкомпонентных векторов |
| |
♦ – первый класс показаний | ▼ – второй класс показаний | ■ – общий класс показаний |
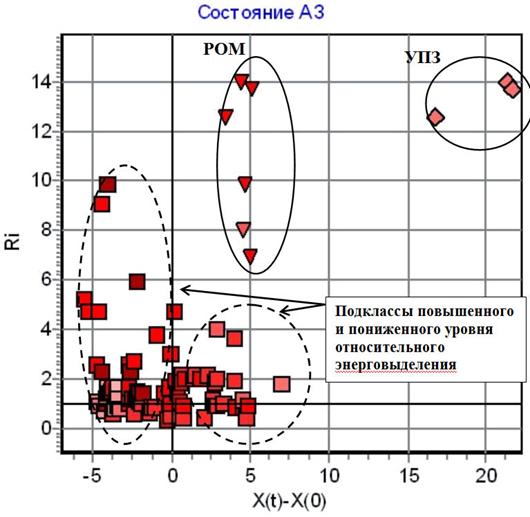
Первый подкласс – это измерительные каналы в ТВС с ОР СУЗ группы УПЗ. Они характеризуются высокой степенью деформации и пониженным уровнем относительного ЭВ по отношению к эталонному состоянию. Группа УПЗ вносит самое большое возмущение в поле ЭВ активной зоны. ТВС под номерами 52, 58, 133 с ОР этой группы показаны на рисунке 30.
Второй подкласс – это измерительные каналы в ТВС с ОР СУЗ РОМ (рис. 29). Показания этих измерительных каналов также характеризуются высокой степенью деформации и пониженным уровнем относительного ЭВ по отношению к эталонному состоянию. Эти кассеты расположены в «центральной» части активной зоны и снижение ЭВ в них обусловлено движением 10 группы ОР (ТВС №№ 41, 44, 79, 85, 120, 123 – рис. 30).
Кроме этого общий класс измерительных каналов разделяется на два подкласса (рис.29) с повышенным (слева от оси ординат) и пониженным (справа от оси ординат) уровнем относительного ЭВ. Эти измерительные каналы характеризуются относительно не высокой степенью деформации по отношению к эталонному состоянию. Такое разделение обусловлено перераспределением потока нейтронов в активной зоне после действия УПЗ и РОМ, вытеснением потока нейтронов из центра активной зоны, где снижается относительное ЭВ, на периферию, где относительное ЭВ растет (рис.30).
| |||
Рисунок 30 Картограмма активной зоны | |||
| - ТВС в нормальном состоянии; |
| - ТВС без средств контроля; |
| - ТВС соответственно с пониженным и повышенным относительным энерговыделением. | ||

3.2.5 Выводы по разделу 3.2
Штатная система представления информации о состоянии активной зоны на энергоблоках с реакторами ВВЭР-1000, не исключает ошибок при ее интерпретации. Информация не подвергается первичному анализу или упорядочиванию при представлении ее оператору. Даже выбор цветовой схемы представления информации (см., например, рис. 13) с малой дискретностью предназначен для идентификации конечной стадии переходного процесса. Это относится, например, к увеличению температуры на выходе из ТВС выше допустимого значения, к падению ПС СУЗ на НКВ.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
